ПЕРЕКРЁСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка имеет приоритет китайской заявки на патент, поданной китайским патентным ведомством с номером заявки 201810566043.4 от 04 июня 2018 г., все содержание которой включено в настоящую заявку в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящая заявка относится к технологии спутниковой навигации и, например, к способу и системе быстрого и точного позиционирования.
УРОВЕНЬ ТЕХНИКИ
[0003] Глобальные навигационные спутниковые системы (GNSS) включают в себя глобальную систему позиционирования (GPS) США, российскую глобальную навигационную спутниковую систему (ГЛОНАСС), систему позиционирования ЕС (Galileo), систему Beidou, Китай, японскую квазизенитную спутниковую систему (QZSS) и индийскую региональную навигационную спутниковую систему (IRNSS) и т.д. Глобальная спутниковая навигационная система, в основном, определяет положение, скорость и время (положение-скорость-время, PVT) движущегося носителя путём использования принципа дальнего пересечения расстояния путём измерения расстояния от спутника до приёмника. Характеристика PVT спутниковых навигационных систем не только ограничена точностью орбит спутников и результатами сдвига часов, но и связана с точностью моделей ошибок ионосферы, тропосферы и т.п. и корректности фиксации параметра неоднозначности. Однако скорость сходимости решения параметра ориентации для позиционирования, измерения скорости и синхронизации в основном зависит от пространственных геометрических конфигураций навигационных спутников. В настоящее время процесс сходимости точного позиционирования находится в диапазоне от 15 минут до 30 минут, и длительное время сходимости не может удовлетворять требованиям высокоточного позиционирования в реальном времени.
[0004] Для того чтобы уменьшать время сходимости, в настоящее время, в основном, используется региональная дифференциальная коррекция или совместное решение множества навигационных систем. В региональных системах дифференциальной коррекции, таких как кинематика в реальном времени (RTK), расширенный режим реального времени (RTX) и позиционирование высокой точности - кинематика в реальном времени (PPP-RTK), информация об ошибках ионосферы, тропосферы и т.п. текущего региона решается путём использования региональных эталонных станций для коррекции соответствующих ошибок на мобильной станции так, чтобы достигать быстрого разделения параметра неоднозначности и параметра положения, то есть параметр неоднозначности может быть зафиксирован в течение нескольких периодов дискретизации, и достигаются результаты позиционирования порядка сантиметра и результаты измерения скорости и синхронизации соответствующей точности. Путём использования мультинавигационной спутниковой системы число наблюдаемых спутников может быть значительно увеличено, пространственные геометрические конфигурации спутников могут быть улучшены, и скорость сходимости решений параметров может быть ускорена, тем самым улучшая характеристику PVT.
[0005] Однако все вышеупомянутые способы имеют свои ограничения. Например, региональная система дифференциальной коррекции может только обеспечивать высокоточные услуги PVT в пределах определённой дальности, а мультинавигационная спутниковая система имеет ограниченное влияние на ускорение сходимости позиционирования высокой точности (PPP).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Ниже приводится обзор объектов изобретения, описанных здесь подробно. Настоящий обзор не предназначен для ограничения объёма охраны формулы изобретения.
[0007] Региональная система дифференциальной коррекции ограничена регионами. Как правило, она может только обеспечивать высокоточные услуги PVT в пределах определённой дальности. Если сфера функционирования превышена, информация дифференциальной коррекции больше не доступна. Несмотря на то, что мультинавигационная спутниковая система может улучшать её скорость сходимости, поскольку соответствующие навигационные спутники расположены на средних и высоких орбитах, и угол, охватываемый спутниками в зените за короткое время, является маленьким, и изменения в пространственных геометрических конфигурациях спутников не являются очевидными, этот способ имеет ограниченное влияние на ускорение сходимости позиционирования высокой точности, и его время сходимости по-прежнему требует по меньшей мере, 6 минут в случае, когда неоднозначность зафиксирована. Учитывая, что LEO-спутники дифференциальной коррекции движутся относительно быстро относительно наземной станции мониторинга, это будет приводить к быстрым изменениям геометрической структуры и быстрому разделению параметров неоднозначности и параметров положения, тем самым ускоряя скорость сходимости PVT. В связи с этим эффективным способом преодоления недостатка текущих высокоточных услуг PVT является объединение средне-, высоко-, низкоорбитальных спутников дифференциальной коррекции для услуг навигации.
[0008] Настоящая заявка предлагает способ и систему позиционирования на основе навигационных спутников и спутников дифференциальной коррекции на низкой околоземной орбите (LEO), которые используют группировки LEO-спутников дифференциальной коррекции для передачи сигналов навигационных спутников, тем самым реализуя крупномасштабные, быстрые и высокоточные услуги PVT путём объединения высоко-, средне-, низкоорбитальных навигационных спутников.
[0009] Настоящая заявка принимает следующие технические решения:
[0010] Настоящая заявка предлагает способ быстрого и точного позиционирования, который включает в себя: этап 1, на котором получают данные наблюдения навигационных спутников и LEO-спутников дифференциальной коррекции на текущий период дискретизации и предварительно обрабатывают данные наблюдения; этап 2, на котором соответственно получают навигационные телеграммы навигационных спутников и LEO-спутников дифференциальной коррекции и получают точную орбиту и сдвиг часов навигационных спутников и точную орбиту и сдвиг часов LEO-спутников дифференциальной коррекции согласно полученным навигационным телеграммам LEO-спутников дифференциальной коррекции; этап 3, на котором корректируют ошибки, принятые в процессе позиционирования, согласно полученным навигационным телеграммам; этап 4, на котором выполняют нормализацию путём принятия типа спутниковой навигационной системы в качестве эталона для получения единых линейных уравнений наблюдения и вычисляют значения наблюдения параметров позиционирования и измерения скорости; этап 5, на котором получают оценочные значения параметров позиционирования и измерения скорости на текущий период дискретизации посредством уравнения состояния согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации; этап 6, на котором генерируют и сохраняют результаты позиционирования и измерения скорости на текущий период дискретизации согласно оценочным значениям параметров позиционирования и измерения скорости на текущую эпоху и возвращаются на этап 1.
[0011] Причём этап 2 включает в себя этап, на котором: собирают информацию коррекции представления в пространстве состояний SSR в реальном времени по сети для получения высокоточной орбиты в реальном времени и сдвига часов в реальном времени.
[0012] Причём, если сдвиг 



В уравнениях 
















[0013] Причём уравнение наблюдения представляет собой:

[0014] В уравнении  обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов,
обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов, 
 и
и  – скорости спутника,
– скорости спутника,  и
и  – скорости станции мониторинга,
– скорости станции мониторинга,  обозначает скорость часов приёмника,
обозначает скорость часов приёмника,  обозначает скорость изменения тропосферы.
обозначает скорость изменения тропосферы.
[0015] Причем навигационные спутники содержат, по меньшей мере, одну из спутниковых навигационных систем: глобальная система позиционирования GPS, США, Beidou, Китай, Galileo, ЕС и российская ГЛОНАСС.
[0016] Настоящая заявка предлагает систему позиционирования, которая включает в себя: устройство приёма и обработки данных наблюдения спутников, выполненное с возможностью получения данных наблюдения навигационных спутников и LEO-спутников дифференциальной коррекции на каждый период дискретизации и предварительной обработки данных наблюдения; устройство приёма и обработки навигационных телеграмм спутников, выполненное с возможностью соответственного получения навигационных телеграмм навигационных спутников и LEO-спутников дифференциальной коррекции на каждый период дискретизации и получения точной орбиты и сдвига часов навигационных спутников и точной орбиты и сдвига часов LEO-спутников дифференциальной коррекции согласно полученным навигационным телеграммам LEO-спутников дифференциальной коррекции; устройство коррекции ошибок позиционирования, выполненное с возможностью коррекции ошибок, принятых в процессе позиционирования, согласно полученным навигационным телеграммам; устройство вычисления значений наблюдения параметров позиционирования и измерения скорости, выполненное с возможностью выполнения нормализации путём принятия типа спутниковой навигационной системы в качестве эталона для получения единых линейных уравнений наблюдения и вычисления значений наблюдения параметров позиционирования и измерения скорости; устройство вычисления оценочных значений параметров позиционирования и измерения скорости, выполненное с возможностью получения оценочных значений параметров позиционирования и измерения скорости посредством уравнения состояния согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и сохранённым оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации.
[0017] Устройство сохранения результатов позиционирования и измерения скорости выполнено с возможностью генерации и сохранения результатов позиционирования и измерения скорости на текущую эпоху согласно оценочным значениям параметров позиционирования и измерения скорости на текущий период дискретизации.
[0018] Причём устройство приёма и обработки навигационных телеграмм спутников содержит блок приёма и обработки навигационных телеграмм навигационных спутников и блок приёма и обработки навигационных телеграмм LEO-спутников дифференциальной коррекции.
[0019] Причём устройство коррекции ошибок позиционирования содержит блок коррекции ошибок навигационных спутников и блок коррекции ошибок LEO-спутников дифференциальной коррекции.
[0020] Причём, если сдвиг 



где 







[0021] Причём уравнение наблюдения измерения скорости представляет собой:

в уравнении обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов, и – скорости спутника, и – скорости станции мониторинга, обозначает скорость часов приёмника, обозначает скорость изменения тропосферы.
[0022] Вариант осуществления настоящей заявки предлагает считываемый компьютером носитель для хранения, который включает в себя сохраненную программу, в которой способ позиционирования, который описан в любом из пунктов выше, исполняется при запуске программы.
[0023] Вариант осуществления настоящей заявки предлагает процессор, который выполнен с возможностью запуска программы, и способ позиционирования, который описан в любом из пунктов выше, исполняется при запуске программы.
[0024] После прочтения и понимания чертежей и подробного описания могут быть понятны другие аспекты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0025] Чертежи используются только для иллюстрации примеров вариантов осуществления и не рассматриваются как ограничение настоящей заявки. На всех чертежах одинаковые ссылочные символы используются для обозначения одинаковых компонентов.
[0026] На чертежах:
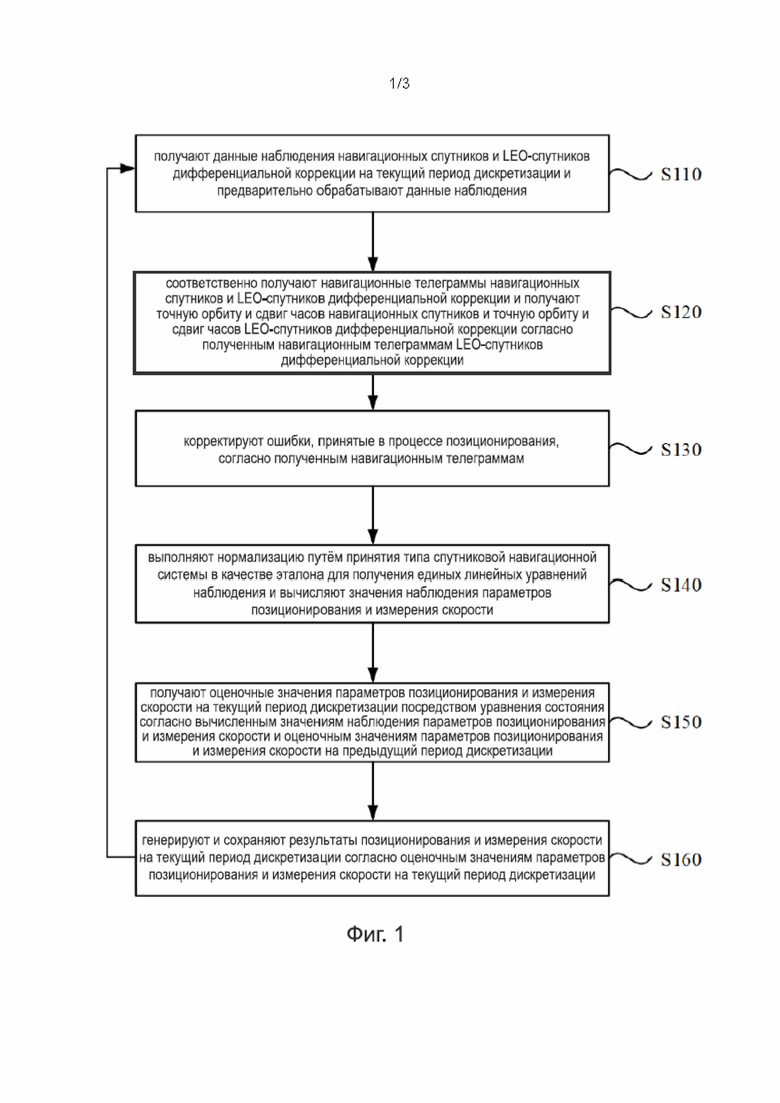
[0027] фиг. 1 представляет блок-схему последовательности операций способа быстрого и точного позиционирования согласно варианту осуществления настоящей заявки;
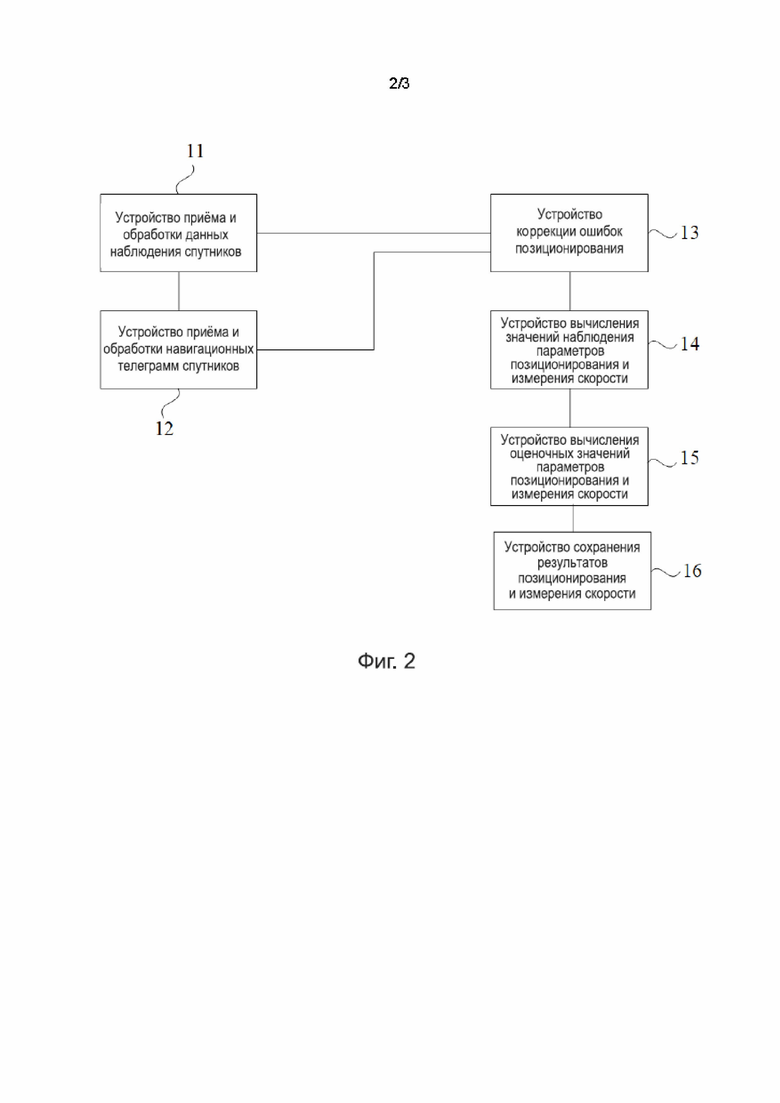
[0028] фиг. 2 представляет схематическую структурную схему системы быстрого и точного позиционирования согласно варианту осуществления настоящей заявки;
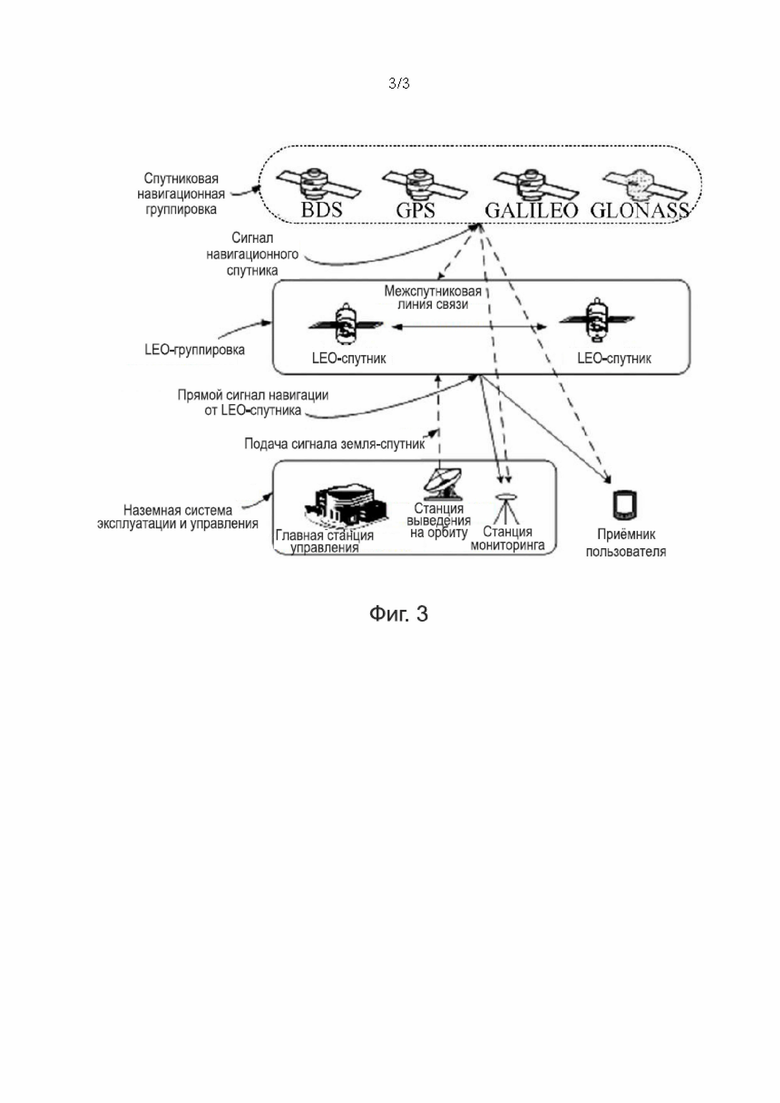
[0029] фиг. 3 представляет схему последовательности операций способа быстрого и точного позиционирования согласно варианту осуществления настоящей заявки.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
[0030] Ниже примерные варианты осуществления настоящего раскрытия будут описаны более подробно со ссылкой на сопровождающие чертежи. Несмотря на то, что чертежи показывают примерные варианты осуществления настоящего раскрытия, следует понимать, что настоящее раскрытие может быть осуществлено в различных формах и не должно быть ограничено вариантами осуществления, изложенными здесь.
I. Единые линейные уравнения наблюдения средне-, высоко-, низкоорбитальных спутников дифференциальной коррекции, полученные нормализацией путём принятия типа спутниковой навигационной системы в качестве эталона
[0031] Для осуществления способа позиционирования, предложенного настоящей заявкой, сначала необходимо построить и линеаризовать единые уравнения наблюдения для средне-, высоко-, низкоорбитальных спутников дифференциальной коррекции, и приёмник получает значения наблюдения параметров позиционирования и измерения скорости согласно построенным линейным уравнениям наблюдения. Причём многочастотные источники информации средне-, высоко-, низкоорбитальной группировки включают в себя многочастотные источники информации, по меньшей мере, одной из всех существующих спутниковых навигационных систем и LEO-спутниковой навигационной системы дифференциальной коррекции. Навигационные спутники и LEO-спутники дифференциальной коррекции имеют одинаковые способы позиционирования, и значения наблюдения обоих могут быть объединены для корректировочного решения. Математическая модель самих уравнений наблюдения представляет собой нелинейное уравнение, поэтому необходимо выполнять разложение в ряд Тейлора уравнения, и линейное уравнение может быть получено после отбрасывания членов второго порядка. Значения наблюдения навигационных спутников и LEO-спутников дифференциальной коррекции могут быть выражены в виде системы линейных уравнений положений и ошибок часов приёмника. С использованием дифференциальных значений наблюдения могут быть получены уравнения наблюдения, связанные с членом скорости станции мониторинга и скоростью изменения сдвигов часов приёмника. Путём объединения этих двух типов уравнений наблюдения может быть получена оптимальная оценка трёх параметров PVT.
[0032] Основные значения наблюдения навигационных спутников, полученные приёмником из навигационных телеграмм, включают в себя два типа псевдодальностей, ρ и фаз φ несущей во множестве точек частоты. Значения наблюдения псевдодальности и фазы от спутника s до станции a мониторинга в точке i частоты могут быть выражены в виде:


где 














[0033] В уравнении (1) параметр 
[0034] При обработке данных навигационных спутников разные типы комбинаций значений наблюдения фазы и псевдодальности частот строятся по необходимости, причём, поскольку влияние ионосферы первого порядка исключается в комбинации без ионосферы, широко используется построение уравнений наблюдения для высокоточной обработки данных. Уравнение наблюдения может быть выражено в виде:


где 



[0035] Аппаратные задержки 

где 


[0036] Принимая во внимание корреляцию каждого параметра в уравнении (2) со станциями мониторинга, спутниками и частотами сигналов и т.д., для многосистемных наблюдений уравнение (2) может быть расширено до:
где S обозначает систему GNSS. Для навигационных спутниковых систем GPS, Galileo, QZSS, Beidou и т.п., которые используют технологию множественного доступа с кодовым разделением, частоты несущей их разных спутников являются одинаковыми, поэтому аппаратные задержки значений наблюдения псевдодальности и фазы несущей на стороне приёмника являются одинаковыми для всех спутников одной системы. Однако, поскольку система ГЛОНАСС использует технологию множественного доступа с частотным разделением, её соответствующие аппаратные задержки псевдодальности и фазы на стороне приёмника также связаны со спутником (частотой), и разные спутники ГЛОНАСС (частота) соответствуют разным аппаратным задержкам на стороне преемника.
[0037] Так как в PVT-модели сдвига часов навигационных спутников являются одинаковыми, и они будут компенсировать аппаратную задержку 



где 
Когда многорежимная навигационная система обрабатывается в комбинации, обычно оценивается только один параметр сдвига часов приёмника, но вышеупомянутое указывает на то, что параметр сдвига часов приёмника будет компенсировать аппаратную задержку значения наблюдения псевдодальности со стороны приёмника, и этот параметр задержки связан с частотой сигнала и навигационной системой, что, таким образом, приводит к тому, что разные системы соответствуют разным сдвигам 



где 
Само уравнение наблюдения GNSS представляет собой нелинейное уравнение, а связанные способы оценки параметров, в общем, применимы к линейным системам, поэтому его необходимо раскладывать в ряд Тейлора. Уравнение наблюдения GNSS раскладывается в приблизительных координатах станции мониторинга согласно формуле Тейлора, и его члены второго порядка отбрасываются так, что линейные выражения положения и времени получаются следующим образом:


где 
[0038] В уравнении (9) только функции синхронизации и позиционирования являются полными, а уравнение наблюдения измерения скорости представляет собой:
 (10)
(10)
где обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов, Δt обозначает выборочный интервал и и – скорости спутника, и – скорости станции мониторинга, обозначает скорость часов приёмника, обозначает скорость изменения тропосферы.
II. Построение уравнения состояния параметров позиционирования и измерения скорости с помощью алгоритма среднеквадратичной фильтрации
[0039] После выведения уравнений наблюдения положения и времени и уравнений наблюдения скорости алгоритм среднеквадратической фильтрации используется для осуществления оценки состояния параметров позиционирования и измерения скорости. За счёт добавления значений наблюдения LEO-спутников дифференциальной коррекции может быть реализована быстрая сходимость PPP и может быть получена информация параметров с более высокой точностью.
[0040] Основные этапы среднеквадратичной фильтрации информации будут представлены ниже, и е` уравнение состояния представляет собой:

где 


 ,
,
где 


тем самым строя виртуальное уравнение наблюдения шума состояния:
 .
.
[0041] Уравнение наблюдения фильтрации представляет собой:
 ,
,
где 
[0042] Согласно критерию минимальной дисперсии может быть построена функция обновления наблюдения алгоритма среднеквадратичной фильтрации информации:
 .
.
[0043] Если она записана в матричной форме, то:
 .
.
[0044] Путём ортогонального изменения уравнения выше может быть получено следующее:
 .
.
[0045] Также возможно строить функцию обновления состояния алгоритма среднеквадратической фильтрации информации согласно критерию минимальной дисперсии:
 .
.
[0046] Если она записана в матричной форме, то:
 ,
,
где 
[0047] При использовании средне- и высокоорбитальных источников информации для решения параметров позиционирования и измерения скорости за счёт ограничений группировки спутников точность решения и время сходимости часто не могут удовлетворять требованиям быстрого и высокоточного позиционирования. Использование позиционирования со слиянием средне-, высоко-, низкоорбитальных многочастотных источников информации может корректировать геометрическую структуру видимых спутников, достигать быстрой сходимости и тем самым улучшать точность решения позиционирования. Фиг. 1 показывает блок-схему последовательности операций способа позиционирования согласно варианту осуществления настоящей заявки. Способ может быть осуществлён системой позиционирования, которая может быть исполнена в, по меньшей мере, или программном обеспечении или аппаратном обеспечении. Причём многочастотные источники информации средне, высоко-, низкоорбитальной группировки включают в себя многочастотные источники информации, по меньшей мере, одной из всех существующих спутниковых навигационных систем и низкоорбитальной спутниковой навигационной системы дифференциальной коррекции. Как показано на фиг. 1, способ позиционирования согласно варианту осуществления настоящей заявки включает в себя этап S110 – этап S160.
[0048] На этапе S110 получают и предварительно обрабатывают данные наблюдения навигационных спутников и спутников дифференциальной коррекции LEO на текущую эпоху. Процесс представляет собой следующий этап, на котором: получают многосистемные многополосные значения наблюдения и значения наблюдения LEO-спутников дифференциальной коррекции посредством отслеживания приёмника и наблюдений и предварительно обрабатывают данные.
[0049] Причём навигационные спутники включают в себя, по меньшей мере, одну из спутниковых навигационных систем: GPS, США, Beidou, Китай, Galileo, ЕС и российская ГЛОНАСС.
[0050] На этапе S120 получают навигационные телеграммы навигационных спутников и спутников дифференциальной коррекции LEO и одновременно получают точные орбиты и сдвиг часов навигационных спутников и LEO-спутников дифференциальной коррекции согласно полученным навигационным телеграммам LEO-спутников дифференциальной коррекции. Процесс представляет собой этап, на котором: получают навигационные телеграммы навигационных спутников и LEO-спутников дифференциальной коррекции и используют число орбит и коэффициенты сдвига часов, обеспеченные навигационными телеграммами, для интерполяции для получения положения спутника и сдвига часов спутника в текущий момент времени. Причём, поскольку LEO-спутники дифференциальной коррекции имеют характеристики, отличные от навигационных спутников, навигационные телеграммы LEO-спутников дифференциальной коррекции отличны от навигационных телеграмм навигационных спутников. Например, навигационные телеграммы LEO-спутников дифференциальной коррекции имеют больше типов параметров. В связи с этим вычисление орбит и сдвигов часов LEO-спутников дифференциальной коррекции также отличается от вычисления орбит и сдвигов часов навигационных спутников. Например, по сравнению с вычислением орбит навигационных спутников в вычислении орбит LEO-спутников дифференциальной коррекции необходимо учитывать больше факторов возмущений. Поскольку точность орбит и сдвигов часов LEO-спутников дифференциальной коррекции и навигационных спутников, представленные широковещательными эфемеридами, как правило, не могут удовлетворять требованиям высокоточного позиционирования. В варианте осуществления для того, чтобы получать орбиты в реальном времени и сдвиг часов в реальном времени с высокой точностью, информация коррекции представления в пространстве состояний (SSR) может быть принята в реальном времени по сети.
[0051] На этапе S130 ошибки, принятые в процессе позиционирования, корректируют согласно полученным навигационным телеграммам.
[0052] Ошибки, которые могут быть скорректированы с помощью модели ошибок, корректируют на этапе 130 и затем ошибки, которые не могут быть скорректированы с помощью модели ошибок, корректируют посредством вычисления значений наблюдения параметров позиционирования и измерения скорости на этапе S140 и оценки параметров позиционирования и измерения скорости на этапе S150. Для LEO-спутников дифференциальной коррекции и навигационных спутников некоторые ошибки различаются, и ошибки необходимо корректировать соответственно согласно разным спутниковым навигационным системам.
[0053] В процессе позиционирования результат позиционирования часто подвергается влиянию множества составляющих ошибок, и ослабление влияния каждой ошибки представляет собой основу для получения результатов высокоточного позиционирования. Согласно корреляции эти ошибки могут быть подразделены на ошибки, связанные со станциями мониторинга, ошибки, связанные со спутниками, и ошибки, связанные с распространением сигналов спутников. Обычно используемые способы для ослабления влияния ошибок позиционирования включают в себя коррекцию модели и оценку параметров. Для некоторых составляющих ошибок, физические характеристики которых были понятны, их влияния могут быть точно исключены путём использования формул коррекции, таких как релятивистские эффекты, эффекты вращения земли и т.д.; для некоторых составляющих ошибок, которые могут быть подогнаны под модель, их влияния могут быть исключены путём использования значений модели, полученных моделью подгонки, таких как поправка на приливы твердой земли, тропосферная поправка и т.д.; и для некоторых других составляющих ошибки с неизвестными физическими характеристиками и плохой подгонкой модели способы оценки параметров могут быть использованы для исключения их влияния на позиционирование, таких как сдвигов часов приёмника и т.д.
[0054] На этапе S140 вычисляют значения наблюдения параметров позиционирования и измерения скорости согласно единым линейным уравнениям наблюдения, полученным нормализацией путём принятия типа спутниковой навигационной системы в качестве эталона. Процесс выглядит следующим образом: согласно полученным данным наблюдения и навигационным телеграммам вычисляют положение приёмника посредством вышеприведенной формулы (9), и одновременно также может быть вычислен сдвиг часов приёмника; скорость приёмника также может быть вычислена посредством вышеприведенной формулы (10).
[0055] На этапе S150 согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и оценочным значениям параметров позиционирования и измерения скорости на предыдущем периоде дискретизации оценивают параметры позиционирования и измерения скорости на настоящий период дискретизации посредством уравнения состояния для получения оценочных значений параметров позиционирования и измерения скорости на настоящий период дискретизации. Процесс выглядит следующим образом: согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации вычисляют оценочные значения параметров позиционирования и измерения скорости на настоящий период дискретизации посредством вышеприведенной формулы (11) и сохраняют вычисленные оценочные значения параметров позиционирования и измерения скорости.
На этапе S160 согласно оценочным значениям параметров позиционирования и измерения скорости на текущий период дискретизации генерируют и сохраняют результаты позиционирования и измерения скорости на текущий период дискретизации, и обработка возвращается на этап S110.
[0056] Фиг. 2 показывает систему позиционирования согласно варианту осуществления настоящей заявки. Причём многочастотные источники информации средне, высоко-, низкоорбитальной группировки включают в себя многочастотные источники информации, по меньшей мере, одной из всех существующих спутниковых навигационных систем и низкоорбитальной спутниковой навигационной системы дифференциальной коррекции.
[0057] Как показано на фиг. 2, система позиционирования согласно варианту осуществления настоящей заявки включает в себя: устройство 11 приёма и обработки данных наблюдения спутников, устройство 12 приёма и обработки навигационных телеграмм спутников, устройство 13 коррекции ошибок позиционирования, устройство 14 вычисления значений наблюдения параметров позиционирования и измерения скорости, устройство 15 вычисления оценочных значений параметров позиционирования и измерения скорости и устройство 16 сохранения результатов позиционирования и измерения скорости.
[0058] Причём устройство 11 приёма и обработки данных наблюдения спутников выполнено с возможностью получения данных наблюдения навигационных спутников и LEO-спутников дифференциальной коррекции на каждый период дискретизации и предварительной обработки данных.
[0059] Устройство 12 приёма и обработки навигационных телеграмм спутников выполнено с возможностью получения навигационных телеграмм навигационных спутников и LEO-спутников дифференциальной коррекции на каждый период дискретизации и одновременного получения точной орбиты и сдвига часов навигационных спутников и LEO-спутников дифференциальной коррекции согласно полученным навигационным телеграммам спутников дифференциальной коррекции LEO. В варианте осуществления устройство 12 приёма и обработки навигационных телеграмм спутников включает в себя блок приёма и обработки навигационных телеграмм навигационных спутников и блок приёма и обработки навигационных телеграмм LEO-спутников дифференциальной коррекции.
[0060] Устройство 13 коррекции ошибок позиционирования выполнено с возможностью коррекции ошибок, принятых в процессе позиционирования, согласно полученным навигационным телеграммам. В варианте осуществления устройство 13 коррекции ошибок позиционирования включает в себя блок коррекции ошибок навигационных спутников и блок коррекции ошибок LEO-спутников дифференциальной коррекции.
[0061] Устройство 14 вычисления значений наблюдения параметров позиционирования и измерения скорости выполнено с возможностью выполнения нормализации путём принятия типа спутниковой навигационной системы в качестве эталона для получения единых линейных уравнений наблюдения и вычисления значений наблюдения параметров позиционирования и измерения скорости согласно единым линейным уравнениям наблюдения.
[0062] Устройство 15 вычисления оценочных значений параметров позиционирования и измерения скорости выполнено с возможностью оценки параметров позиционирования и измерения скорости на настоящий период дискретизации согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и сохранённым оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации для получения оценочных значений параметров позиционирования и измерения скорости на текущий период дискретизации посредством уравнения состояния.
[0063] Устройство 16 сохранения результатов позиционирования и измерения скорости выполнено с возможностью генерации и сохранения результатов позиционирования и измерения скорости на текущий период дискретизации согласно оценочным значениям параметров позиционирования и измерения скорости на текущую эпоху.
[0064] Фиг. 3 представляет схематическое изображение принципа работы способа быстрого и точного позиционирования, предложенного вариантом осуществления настоящей заявки. Причём осуществление способа позиционирования может включать в себя группировку навигационных спутников, LEO-группировки, наземную систему эксплуатации и управления и приёмник пользователя. Причём: группировка навигационных спутников включает в себя, по меньшей мере, одну из спутниковых навигационных систем: GPS, США, Beidou, Китай, Galileo, ЕС и российская ГЛОНАСС и выполнена с возможностью передачи сигналов навигационных спутников. LEO-группировка включает в себя множество LEO-спутников, распределенных на множестве орбитальных плоскостей, и множество LEO-спутников передаёт прямые сигналы навигации на основе высокоточных эталонов времени и частоты через конкретные полосы частот для обеспечения стабильного покрытия мира или конкретных зон обслуживания, и выполнена с возможностью передачи прямых сигналов навигации и информации дифференциальной коррекции навигации. Наземная система эксплуатации и управления выполняет экономическое вычисление и обработку и управляет и контролирует спутники и группировки. Приёмник пользователя принимает прямые сигналы навигации, передаваемые навигационными спутниками и LEO-спутниками, а также информацию дифференциальной коррекции навигации, передаваемую LEO-спутниками, и выполняет точное позиционирование, измерение скорости и синхронизацию на основе прямых сигналов навигации от навигационных спутников и LEO-спутников и информации дифференциальной коррекции навигации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ И УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ ВЫСОКОЙ ТОЧНОСТИ - КИНЕМАТИКИ В РЕАЛЬНОМ ВРЕМЕНИ (PPP-RTK) | 2018 |
|
RU2759392C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Система высокоточной дифференциальной коррекции для контроля подвижных объектов | 2019 |
|
RU2713571C1 |
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОТРЕБИТЕЛЯ В СИСТЕМАХ ГЛОНАСС/GPS И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2486544C2 |
Заявленная группа изобретений относится к технологии спутниковой навигации и, например, к способу и системе быстрого и точного позиционирования. Техническим результатом изобретения является реализация крупномасштабных, быстрых и высокоточных услуг определения PVT (положение-скорость-время) путём объединения высоко-, средне-, низкоорбитальных навигационных спутников. Способ включает в себя этапы, на которых: получают данные наблюдения навигационных спутников и LEO-спутников дифференциальной коррекции на текущую эпоху; соответственно получают навигационные телеграммы навигационных спутников и LEO-спутников дифференциальной коррекции и получают точную орбиту и сдвиг часов; корректируют ошибки, принятые в процессе позиционирования, согласно полученным навигационным телеграммам; выполняют нормализацию путём принятия типа спутниковой навигационной системы в качестве эталона для получения единых линейных уравнений наблюдения и вычисляют значения наблюдения параметров позиционирования и измерения скорости; вычисляют оценочные значения параметров позиционирования и измерения скорости на текущий период дискретизации посредством уравнения состояния согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации; генерируют и сохраняют результаты позиционирования и измерения скорости на текущий период дискретизации согласно оценочным значениям параметров позиционирования и измерения скорости. 4 н. и 7 з.п. ф-лы, 3 ил.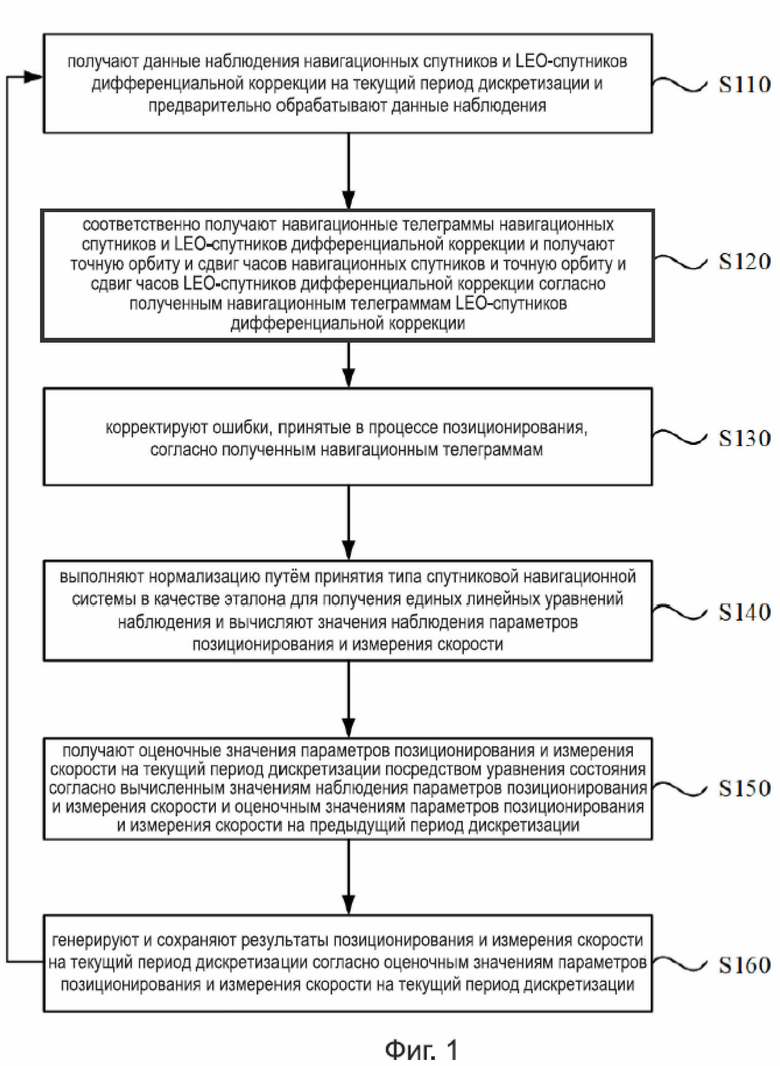
1. Способ быстрого и точного позиционирования, включающий в себя
этап, на котором получают данные наблюдения навигационных спутников и спутников дифференциальной коррекции на низкой околоземной орбите (LEO) на текущий период дискретизации и предварительно обрабатывают данные наблюдения,
этап 2, на котором соответственно получают навигационные телеграммы навигационных спутников и LEO-спутников дифференциальной коррекции и получают точную орбиту и сдвиг часов навигационных спутников и точную орбиту и сдвиг часов LEO-спутников дифференциальной коррекции согласно полученным навигационным телеграммам спутников дифференциальной коррекции LEO,
этап 3, на котором корректируют ошибки, принятые в процессе позиционирования, согласно полученным навигационным телеграммам,
этап 4, на котором выполняют нормализацию путём принятия типа спутниковой навигационной системы в качестве эталона для получения единых линейных уравнений наблюдения и вычисляют значения наблюдения параметров позиционирования и измерения скорости,
этап 5, на котором получают оценочные значения параметров позиционирования и измерения скорости на текущий период дискретизации посредством уравнения состояния согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации,
этап 6, на котором генерируют и сохраняют результаты позиционирования и измерения скорости на текущую эпоху согласно оценочным значениям параметров позиционирования и измерения скорости на текущий период дискретизации и возвращаются на этап 1.
2. Способ позиционирования по п. 1, в котором единые линейные уравнения наблюдения содержат уравнения наблюдения позиционирования, и если сдвиг 



где 
















3. Способ позиционирования по п. 2, в котором единые линейные уравнения наблюдения содержат уравнение наблюдения измерения скорости, которое представляет собой:
 ,
,
где  обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов,
обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов, 
 и
и  – скорости спутника,
– скорости спутника,  и
и  – скорости станции мониторинга,
– скорости станции мониторинга,  обозначает скорость часов приёмника,
обозначает скорость часов приёмника,  обозначает скорость изменения тропосферы.
обозначает скорость изменения тропосферы.
4. Способ позиционирования по п. 2, в котором навигационные спутники содержат, по меньшей мере, одну из спутниковых навигационных систем: глобальная система позиционирования GPS, США, Beidou, Китай, Galileo, ЕС и российская ГЛОНАСС.
5. Система быстрого и точного позиционирования, содержащая
устройство приёма и обработки данных наблюдения спутников, выполненное с возможностью получения данных наблюдения навигационных спутников и спутников дифференциальной коррекции на низкой околоземной орбите (LEO) на каждый период дискретизации и предварительной обработки данных наблюдения;
устройство приёма и обработки навигационных телеграмм спутников, выполненное с возможностью соответственного получения навигационных телеграмм навигационных спутников и LEO-спутников дифференциальной коррекции на каждый период дискретизации и получения точной орбиты и сдвига часов навигационных спутников и точной орбиты и сдвига часов LEO-спутников дифференциальной коррекции согласно полученным навигационным телеграммам LEO-спутников дифференциальной коррекции,
устройство коррекции ошибок позиционирования, выполненное с возможностью коррекции ошибок, принятых в процессе позиционирования, согласно полученным навигационным телеграммам,
устройство вычисления значений наблюдения параметров позиционирования и измерения скорости, выполненное с возможностью выполнения нормализации путём принятия типа спутниковой навигационной системы в качестве эталона для получения единых линейных уравнений наблюдения и вычисления значений наблюдения параметров позиционирования и измерения скорости,
устройство вычисления оценочных значений параметров позиционирования и измерения скорости, выполненное с возможностью получения оценочных значений параметров позиционирования и измерения скорости на текущую эпоху посредством уравнения состояния согласно вычисленным значениям наблюдения параметров позиционирования и измерения скорости и сохранённым оценочным значениям параметров позиционирования и измерения скорости на предыдущий период дискретизации,
устройство сохранения результатов позиционирования и измерения скорости, выполненное с возможностью генерации и сохранения результатов позиционирования и измерения скорости на текущую эпоху согласно оценочным значениям параметров позиционирования и измерения скорости на текущий период дискретизации.
6. Система позиционирования по п. 5, в которой устройство приёма и обработки навигационных телеграмм спутников содержит блок приёма и обработки навигационных телеграмм навигационных спутников и блок приёма и обработки навигационных телеграмм LEO-спутников дифференциальной коррекции.
7. Система позиционирования по п. 5, в которой устройство коррекции ошибок позиционирования содержит блок коррекции ошибок навигационных спутников и блок коррекции ошибок LEO-спутников дифференциальной коррекции.
8. Система позиционирования по п. 5, в которой единые линейные уравнения наблюдения содержат уравнения наблюдения позиционирования, и если сдвиг 



где 







9. Система позиционирования по п. 8, в которой единые линейные уравнения наблюдения содержат уравнение наблюдения измерения скорости, которое представляет собой:
 ,
,
где обозначает скорость изменения фазы между станцией мониторинга и спутником за единицу цикла/циклов, и – скорости спутника, и – скорости станции мониторинга, обозначает скорость часов приёмника, обозначает скорость изменения тропосферы.
10. Считываемый компьютером носитель для хранения, который содержит сохранённую программу, в которой способ по любому одному из пп. 1-4 исполняется при запуске программы.
11. Процессор, который выполнен с возможностью запуска программы, и способ по любому одному из пп. 1-4 исполняется при запуске программы.
| US 2016011318 A1, 14.01.2016 | |||
| CN 107229061 A, 03.10.2017 | |||
| US 2013065514 A1, 14.03.2013 | |||
| CN 105158780 A, 16.12.2015 | |||
| WO 2013122497 A1, 22.08.2013 | |||
| CN 106569241 A, 19.04.2017 | |||
| УНИВЕРСАЛЬНАЯ ВЫСОКОЭФФЕКТИВНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2428714C2 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |

