Область техники
Группа изобретений относится к способу и устройству цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя (энкодера), которые могут быть использованы в электроприводе, в частности в тяговом электроприводе транспортных средств различного вида и назначения.
Уровень техники
Импульсные датчики перемещения (энкодеры) широко применяются в различных отраслях промышленности, прежде всего в автоматизированном электроприводе. К их достоинствам относится относительная простота и низкая стоимость, стабильность характеристик, помехоустойчивость и высокая надежность. Выходной сигнал таких датчиков передастся обычно в виде импульсов по двум каналам (канал основного и инверсного сигнала) для защиты от помех в линиях передачи. При этом сигналы, передаваемые по прямому и инверсному каналу, сдвинуты друг относительно друга по фазе на 90°, что позволяет определить не только перемещение ротора на одну дискрету, но и направление вращения ротора. Минимальная измеряемая величина перемещения - одна дискрета датчика - определяется числом импульсов на механический оборот. Дискретность измерения обычно составляет от нескольких десятков до десятков тысяч дискрет на механический оборот (для разных типов энкодеров) с учетом определения перемещения по фронтам прихода импульсов (что, с учетом двух каналов импульсов, позволяет учетверить число измеряемых дискретных перемещений на оборот).
Основные проблемы использования энкодеров в автоматизированном электроприводе связаны именно с дискретностью измерения перемещения ротора. При регулировании частоты вращения от нуля до максимального значения традиционные способы обработки сигналов импульсных датчиков - измерение времени между приходом импульсов, или измерение числа импульсов за определенное время, или усреднение (фильтрация) импульсов стандартной площади, формируемых фронтом прихода импульсов датчика, а также комбинации этих способов приводят к неудовлетворительной работе привода. Связано это, в первую очередь, с недопустимо большим запаздыванием в получении оценки частоты вращения в области низких частот вращения (режим позиционирования). Проблема усугубляется в таких приводах, как тяговые, в которых широкий рабочий температурный диапазон, большой уровень вибраций и помех не позволяют использовать импульсные датчики с высоким разрешением (например, фотоимпульсные). При использовании электромагнитных датчиков, удовлетворяющих условиям эксплуатации в тяговых приводах, число импульсов на механический оборот обычно не превышает нескольких сотен, а с учетом многополюсности таких машин, число импульсов на электрический оборот не превышает нескольких десятков.
Из уровня техники известен способ определения ошибок в сигналах положения ротора при помощи использования алгоритма определения положения ротора, компенсирующего ошибки в системе (см. ЕР 1624563 A3, МПК H02P 25/08, опубл. 08.02.2006), который принят за прототип.
Вышеуказанный способ заключается в том, что компенсирующие сигналы могут записываться в системе управления и использоваться для улучшения точности выходных сигналов датчика положения ротора, улучшая выходные параметры работы электрической машины. В алгоритме коррекции могут использоваться модель предсказания/коррекции, алгоритмы импульсной диагностики, формирования тока, определения параметров индуктивности и т.д.
Однако известный из уровня техники способ не позволяет решить вышеуказанные проблемы, такие как запаздывание в получении оценки частоты вращения в области низких частот вращения вала электродвигателя, что в свою очередь ведет к неудовлетворительной работе электропривода в целом.
Таким образом, задача настоящей группы изобретений направлена на улучшение характеристик системы управления электроприводом.
Раскрытие изобретения
Прежде всего следует учесть, что импульсный датчик перемещения (энкодер) измеряет перемещение на одну дискрету. Не представляет сложности подсчет общего числа перемещений, то есть с помощью импульсного датчика фактически измеряется перемещение ротора. Обычно перемещение ротора измеряется с точностью до начального значения положения ротора, которое для некоторых приводов, например с асинхронным двигателем, не имеет значения. Однако отдельные датчики имеют так называемую «нулевую метку» оборота, что позволяет измерять абсолютное перемещение ротора. Таким образом, импульсный датчик является датчиком перемещения, причем перемещение измеряется дискретно по уровню.
Первичная обработка сигналов импульсного датчика осуществляется в аппаратной части, обычно встраиваемой в специализированный контроллер привода. Такая аппаратная часть содержит реверсивный счетчик импульсов (с учетом направления вращения), а также схему защиты от помех одной полярности в линии связи в прямых и инверсных сигналах датчика и схему защиты от «дребезга» сигналов, возникающих при работе компараторов импульсного датчика. Код счетчика импульсов при начале цикла вычислений вводится в управляющий процессор.
Технический результат заявленной группы изобретений заключается в обеспечении корректного измерения положения ротора на момент начала текущего цикла вычисления контроллера управления приводом и повышении точности оценивания углового положения и угловой скорости вращения ротора электродвигателя, что позволяет существенно улучшить характеристики системы управления приводом в целом, повысить надежность управления, исключить опасные переходные процессы, улучшить КПД привода. Указанные преимущества особенно важны для тяговых электроприводов.
Заявленный технический результат достигается благодаря применению способа цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя-энкодера при помощи процессорного контроллера, обеспечивающего получение системой управления электропривода значений его механических переменных в течение k-го цикла вычислений контроллера, таких как угловое положение ротора электродвигателя Θk, угловая скорость вращения ротора nk и момент нагрузки на валу электродвигателя MLk, и предназначенный для получения точных оценок указанных переменных, заключающийся в том, что для обработки информации об угловом положении ротора используется наблюдатель механических переменных состояния электропривода и прогнозатор, для функционирования которых предварительно до начала работы электропривода задают равными нулю начальные значения оценок углового положения ротора электродвигателя Θ0, угловой скорости вращения ротора п0 и момента нагрузки на валу электродвигателя ML0, и начальный корректирующий сигнал прогнозатора S0, соответствующие состоянию отключенного электропривода, задают величину дискреты датчика Θd, зависящую от параметров зубчатого колеса энкодера, и вводят в буфер контроллера длительность цикла вычислений контроллера 7, совокупный момент инерции ротора электродвигателя J и значения корректирующих коэффициентов L1, L2, L3, в начале каждого цикла вычислений из системы управления электроприводом наблюдатель механических переменных состояния, входящий в состав контроллера, получает требуемое значение электромагнитного момента Mk, из энкодера после первичной обработки его сигнала получают количество импульсов на текущий интервал вычисления i, с помощью таймера осуществляют измерение и запись в буфер контроллера времени tk от прихода последнего импульса до начала текущего цикла вычислений, кроме того, в буфере сохраняют измеренное в прошлом цикле вычислений значение углового положения ротора электродвигателя Θk-1изм, полученные в прошлом цикле вычислений значение корректирующего сигнала прогнозатора Sk-1 и значения оценок углового положения ротора Θk, угловой скорости вращения ротора nk и момента нагрузки электродвигателя MLk, которые в данном цикле используются как его текущие значения, в течение каждого цикла вычислений получают измеренное значение углового положения ротора из выражения Θkизм=i·Θd, рассчитывают предварительное значение корректирующего сигнала прогнозатора S'k из выражения S'k,=tk·nk, если Θkизм≠Θk-1изм, а в противном случае из выражения S'k=Sk-1+T·nk и получают значение корректирующего сигнала прогнозатора Sk, равное Θd, если S'k>Θd, а в противном случае равное S'k, определяют прогнозируемое на начало следующего цикла вычислений значение углового положения ротора Θk из выражения Θ*k=Θkизм+Sk, и далее в наблюдателе рассчитывают значения оценок углового положения ротора, угловой скорости вращения ротора и момента нагрузки, применяемые для определения параметров системы управления электроприводом, согласно выражениям:



которые записывают в буфер контроллера и в следующем цикле вычислений используют для обеспечения работы наблюдателя механических переменных состояния.
Для реализации заявленного способа, в частности, может быть применено устройство цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя-энкодера при помощи процессорного контроллера, осуществляющее способ по п.1, включающее блок приема и первичной обработки сигналов энкодера, блок умножения числа импульсов энкодера на величину дискреты датчика, прогнозатор, представляющий собой совокупность таймера для измерения времени от последнего импульса в цикле до окончания цикла вычислений, блока расчета предварительного значения корректирующего сигнала прогнозатора, блока ограничения, предназначенного для определения значения корректирующего сигнала прогнозатора и сумматора значений измеренного углового положения ротора и корректирующего сигнала прогнозатора, а также процессорный контроллер, выполненный так, что включает по меньшей мере либо наблюдатель механических переменных состояния электропривода и буфер контроллера либо по меньшей мере наблюдатель механических переменных состояния электропривода, буфер контроллера и прогнозатор, при этом связи между наблюдателем, буфером контроллера и прогнозатором в том и другом случае будут идентичны, причем выход энкодера соединен со входом блока приема и первичной обработки сигналов энкодера, выходы которого соединены со входами блока умножения и таймера, выход таймера соединен со входом буфера контроллера, с выхода которого значение дискреты датчика передается на вход блока умножения, выход которого соединен с первым входом сумматора, соответствующим измеренному значению углового положения ротора, а также со входами блока расчета предварительного значения корректирующего сигнала прогнозатора и буфера контроллера, который также имеет входы для записи значений корректирующего сигнала прогнозатора, рассчитанного в предыдущем цикле вычислений, оценок переменных, полученных в наблюдателе механических переменных состояния электропривода, вход для внешнего программирования и выходы, один из которых соединен со входом блока расчета предварительного значения корректирующего сигнала прогнозатора, второй - с одним из входов блока ограничения, выход блока расчета предварительного значения корректирующего сигнала прогнозатора соединен с другим входом блока ограничения, выход которого соединен со вторым входом сумматора, соответствующим корректирующему сигналу прогнозатора, а выход сумматора соединен с первым входом наблюдателя механических переменных состояния электропривода, на второй вход которого из системы управления электроприводом подают требуемое значение электромагнитного момента, и на выходах которого получают для передачи в систему управления электропривода и для записи в буфер контроллера значения оценок углового положения ротора, угловой скорости вращения ротора и момента нагрузки, которые в следующем цикле вычислений используют для обеспечения работы наблюдателя механических переменных состояния.
В одном из вариантов реализации устройства прогнозатор и процессорный контроллер образуют модульную конструкцию в случае, когда прогнозатор не входит в состав контроллера.
Краткое описание чертежей
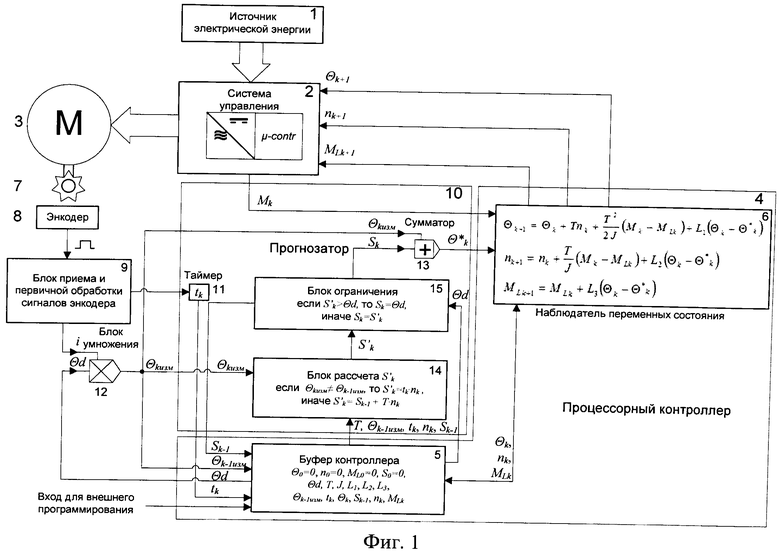
Блок-схема устройства, в котором процессорный контроллер включает буфер контроллера и наблюдатель механических переменных состояния электропривода, представлена на фиг.1.
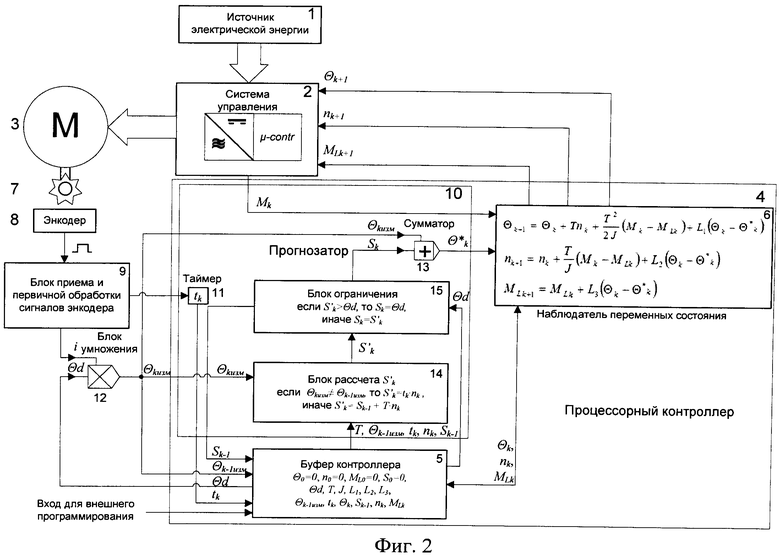
Блок-схема устройства, в котором процессорный контроллер включает прогнозатор, буфер контроллера и наблюдатель механических переменных состояния электропривода, представлена на фиг.2.
Осуществление изобретения
Способ цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя (энкодера) поясняется фиг.1, где изображено устройство, реализующее способ. В данном случае приводится пример применения энкодера в электроприводе, в частности в тяговом электроприводе транспортных средств различного вида и назначения.
Устройство, изображенное на фиг.1, работает следующим образом. Источник электрической энергии 1 вырабатывает энергию, которая передается посредством системы управления тягового электропривода 2 к электродвигателю 3 привода движителей (колес, гусениц и т.п.) транспортного средства. Система управления 2 в общем случае включает регулируемый силовой преобразователь и контроллер системы управления (па фиг.1 и 2 позициями не обозначены), обеспечивающий требуемые параметры электроэнергии на выходе силового преобразователя.
Система управления 2 получает значения оценок переменных механического состояния электропривода (углового положения ротора электродвигателя Θk угловой скорости вращения ротора nk и момента нагрузки на валу электродвигателя MLk) от процессорного контроллера 4, имеющего заданную длительность цикла вычислений. Для удобства объяснения обозначим номер цикла вычислений контроллера индексом k.
Процессорный контроллер 4 включает буфер контроллера 5, обеспечивающий запись, хранение и выдачу значений различных постоянных, переменных и коэффициентов, необходимых для функционирования контроллера 4.
Буфер 5 имеет ряд входов и выходов, в частности вход для внешнего программирования. Данный вход используется для ввода в процессорный контроллер 4 перед началом вычислений длительности цикла вычислений Т, совокупного момента инерции ротора электродвигателя J, дискреты датчика перемещения Θd (угловая величина, соответствующая повороту зубчатого колеса на одно деление), корректирующих коэффициентов L1, L2, L3, задающих темп сходимости оценок механических переменных ротора и/или других величии. Альтернативно, параметры J, L1, L2, L3 могут вычисляться внутри процессорного контроллера 4 по известным (приводимым ниже) соотношениям и записываться в буфер 5.
Процессорный контроллер 4 программируется таким образом, что при каждой его загрузке (до начала работы электропривода) происходит инициализация (обнуление) в буфере 5 начальных значений углового положения ротора Θ0, угловой скорости вращения ротора n0 и момента нагрузки на валу электродвигателя ML0, а также корректирующего сигнала прогнозатора S0.
В процессорном контроллере 4 также реализован программными или программно-аппаратными средствами наблюдатель 6 механических переменных состояния электропривода.
Функционирование наблюдателя состояния основано на использовании модели процессов. Поскольку импульсным датчиком измеряется угловое положение ротора, то в качестве базовой принимается следующая модель механического движения ротора:

где Θ - угловое положение ротора, n - угловая скорость, М - электромагнитный момент, ML - момент нагрузки, J совокупный момент инерции ротора. При этом электромагнитный момент М известен (измеряется). Значение электромагнитного момента в данном цикле вычислений контроллера Mk поступает с выхода системы управления электроприводом 2 на вход наблюдателя 6.
Величина момента нагрузки ML заранее не известна, однако для модели тягового привода она является квази-постоянной (величина момента нагрузки может изменяться, но медленно по сравнению с темпом получения оценок переменных состояния):

Поскольку оценки переменных состояния формируются в управляющем процессорном контроллере 4, функционирующем в дискретном времени, необходимо использование разностной модели. Разностная модель механического движения строится аналитическим интегрированием уравнений механических процессов на интервале дискретизации времени. Значения моделируемых переменных в наблюдателе состояния корректируются по измерениям углового положения Θ* (при анализе процессов оценивания дискретностью измерений положения импульсным датчиком можно пренебречь). При постоянном входном воздействии - электромагнитном моменте вращения, начальные и конечные значения оценок переменных состояния в цикле связаны разностным соотношением (уравнения наблюдателя состояния):



где Т - длительность цикла вычислений, a k - номер цикла. При этом k+1 показывает, что осуществляется счет следующего цикла вычислений. Соответственно, как видно из вышеуказанных выражений, в k+1 цикле вычислений используются значения оценок переменных механического состояния электропривода (Θk, nk, MLk и т.д.), которые определены в предыдущем цикле вычислений. Значения корректирующих коэффициентов L1, L2, L3 определяются по характеристическому уравнению, полученному для темпов изменения ошибки оценивания (мод):

Например, если желаемое движение характеризуется значениями мод λ0=λ1=λ2=λ3, т.е. характеристическое уравнение должно иметь вид (λ0-λ)3=0, то требуемые значения корректирующих коэффициентов вычисляются по формулам:
L1=3·(λ0-1)3;


Значение λ0 должно быть задано (в перечне параметров). Постоянство значений L1, L2, L3 (являющееся следствием линейности уравнений механического движения) позволяет задавать их значения непосредственно как параметры процессорного контроллера.
Выбор корней характеристического уравнения λ1, λ2, λ3 определяет темп сходимости оценок углового положения 0, угловой скорости n и момента нагрузки ML к их фактическим значениям в приводе. При λ0=0 имеет место конечношаговая сходимость (в данном случае максимум за три шага вычислений в процессоре); при -mod(λ)<1 (корни могут выбираться комплексными сопряженными) сходимость носит асимптотический характер.
Наблюдатель представляет собой систему с двумя входами: по электромагнитному моменту М (управление) и по измерению положения ротора Θ. При λ0≠0 входной сигнал Θ будет, очевидно, фильтроваться, причем тем в большей степени, чем ближе значение корня к единице. Однако фильтрация сигнала датчика перемещения не означает динамической задержки в замкнутом контуре управления (например, при регулировании угловой скорости). Действительно, входной сигнал М не фильтруется наблюдателем, то есть наблюдатель не накладывает ограничений на выбор параметров регулирования, что является следствием независимости задач регулирования и оценивания при использовании наблюдателя.
В уравнениях наблюдателя состояния содержится параметр - момент инерции J. В этой связи следует отметить, что можно использовать паспортные данные, экспериментальное определение момента инерции или автоматическую идентификацию, полученную в предположении постоянства (квази-статичного изменения) момента нагрузки:
В последнем случае необходима проверка условий идентифицируемости.
Наблюдатель состояния переменных механического движения позволяет, при относительно медленных темпах сходимости, достаточно хорошо фильтровать измеряемый сигнал датчика перемещения, в том числе сглаживать дискретный по уровню сигнал. Однако остается проблема биений частоты появления импульсов и частоты цикла вычислений: число импульсов за цикл вычислений меняется от цикла к циклу вычислений даже при постоянной скорости вращения. Особенно остро эта проблема проявляется при использовании импульсных датчиков с низкой разрешающей способностью, с относительно небольшим числом импульсов на оборот, что характерно, например, для тяговых приводов.
Для исключения биений, вызываемых асинхронностью прихода импульсов энкодера относительно цикла вычислений в процессорном контроллере 4, предлагается использовать в качестве измерений прогнозные значения углового положения. Получить прогнозные значения можно с помощью прогнозатора, позволяющего скорректировать измерение значения положения ротора на момент начала текущего цикла вычислений. Работа прогнозатора подробно описана ниже.
Для определения величин механических переменных электропривода на одном валу с электродвигателем 3 установлено зубчатое колесо 7, рядом с которым расположен импульсный датчик перемещения зубчатого колеса энкодер 8. Энкодер, в частности, может представлять собой импульсный электромагнитный датчик с квадратурным выходным сигналом и одним либо двумя (прямым и инверсным) выходами, сигналы которых сдвинуты друг относительно друга по фазе на 90°, что позволяет определить не только перемещение ротора на одну дискрету, но и направление вращения ротора. Частота импульсов энкодера 8 прямо пропорциональна скорости изменения угла поворота зубчатого колеса 7, т.е. в конечном счете скорости вращения ротора электродвигателя 3.
Импульсы энкодера 8 поступают на вход блока 9 приема и первичной обработки сигналов энкодера со сбросом данных на один полный оборот зубчатого колеса. Такой блок может включать схему удвоения (для энкодера с двумя выходами - учетверения) импульсов, которая формирует краткий счетный импульс по каждому фронту входных импульсов энкодера, а также реверсивный счетчик импульсов (для энкодера с двумя выходами с учетом направления вращения), различные схемы защиты (от помех одной полярности, от «дребезга» сигналов и т.п.), фильтрования сигналов и т.д. В любом случае на одном из выходов блока 9 формируется сигнал, пропорциональный числу импульсов на текущем интервале вычисления i.
Реверсивный счетчик импульсов, входящий в блок 9, сбрасывается при сохранении (передаче для дальнейших вычислений) сигнала i, пропорционального количеству импульсов на текущем интервале вычисления, т.е. после прихода последнего импульса в данном цикле вычислений. При этом сигнал со второго выхода блока 9 поступает в прогнозатор 10, а именно на вход таймера 11, который сбрасывается в начале каждого цикла вычислений k (синхронизирован с процессорным контроллером 4 в случае, когда не входит в его состав). Таким образом, таймер 11 осуществляет измерение и запись в буфер контроллера 5 времени tk от прихода последнего импульса предыдущего цикла вычислений до начала текущего цикла (длительность операций в блоке 9 и таймере 11 пренебрежимо мала по сравнению с длительностью цикла вычислений).
С выхода блока 9 сигнал i поступает на первый вход блока 12 умножения числа импульсов энкодера на величину дискреты датчика, на второй вход которого из буфера контроллера 5 поступает сигнал, пропорциональный величине Θd, и на выходе которого формируется сигнал измеренного значения углового положения ротора
Θkизм=i·Θd.
Сигнал Θkизм записывается в буфер 5 для использования в следующем цикле вычислений контроллера. Кроме того, он поступает в прогнозатор 10, на первый вход сумматора 13, а также на вход блока 14 расчета предварительного значения корректирующего сигнала прогнозатора S'k.
В блок 14 из буфера 5 также поступают значения Т, Θk-1изм, tk, nk, и Sk-1, необходимые для определения предварительного значения корректирующего сигнала прогнозатора.
Оценка угловой скорости вращения nk в текущем цикле сформирована наблюдателем. Предположим пока, что в этой оценке отсутствуют вариации, связанные с дискретностью датчика и биениями частот.
Тогда естественно считать, что к концу цикла истинное значение углового положения ротора Θ*k будет равно сумме показаний счетчика импульсов Θизм, плюс произведение угловой скорости вращения ротора nk на время от прихода последнего импульса предыдущего цикла вычислений до начала текущего цикла tk. Если же в данном цикле импульсов не было, то указанное время равно длительности цикла tk=T.
Признаком появления импульса датчика в предыдущем цикле является неравенство предыдущего и текущего значений Θизм в циклах вычислений (использование этого признака предпочтительнее, чем других признаков).
Поэтому в блоке 14 расчета предварительного значения корректирующего сигнала прогнозатора S'k производится проверка действительности условия:
Θkизм≠Θk-1изм.
Если условие выполнено (в предыдущем цикле вычислений был хотя бы один импульс датчика), то
S'k=tk·nk,
т.к. вал электродвигателя 3 должен повернуться на угол tk·nk за время tk, когда сигнал счетчика импульсов блока 9, пропорциональный числу импульсов на текущем интервале вычисления i, не изменялся, но вал вращался со скоростью nk.
Если же условие Θkизм≠Θk-1изм не выполнено (в предыдущем цикле вычислений не было импульсов датчика), то
S'k=Sk-1+Т·nk,
т.к. за время цикла Т угловое положение ротора должно измениться на величину T·nk, а общее изменение с учетом предыдущего соответствует корректирующему сигналу прогнозатора в предыдущем цикле вычислений Sk-1, увеличенному на Т·nk.
Наконец, вследствие неизбежных погрешностей вычислений и измерений, естественно ограничить величину корректирующего сигнала прогнозатора значением угловой дискреты датчика Θd (иначе в интервале (tk,T) появился бы импульс датчика). Это осуществляется в блоке ограничения 15, в котором проверяется выполнение условия.
Если условие выполнено (полученное в блоке 14 значение S'k превышает дискрету датчика), то задают значение корректирующего сигнала прогнозатора Sk=Θd. Если же условие S'k>Θd не выполнено, то задают значение корректирующего сигнала прогнозатора Sk=S'k.
С выхода блока ограничения 15 корректирующий сигнал прогнозатора Sk поступает на второй вход сумматора 13, на выходе которого получают прогнозируемое на начало следующего цикла вычислений значение углового положения ротора Θ*k из выражения Θ*k=kизм+Sk.
В значении Θk* отсутствуют составляющие, связанные с дискретностью измерений и биениями частот, следовательно, если использовать скорректированное таким образом значение показаний счетчика импульсов для измерения положения ротора в конце цикла вычислений и использовать его в качестве измерений в наблюдателе состояния 6, то и в оценках скорости вращения nk и момента нагрузки MLk эти составляющие будут отсутствовать. Это обосновывает сделанное ранее предположение.
Сигнал, пропорциональный значению Θk*, поступает с выхода блока 15 на второй вход наблюдателя 6, в котором рассчитываются значения оценок углового положения, угловой скорости вращения ротора и момента нагрузки (Θk+1, nk-1 и MLk+1). Эти оценки с выхода наблюдателя 6 поступают на вход системы управления 2, в которой применяются для определения параметров управления электроприводом в течение следующего цикла вычислений. Они также записываются с выхода наблюдателя 6 в буфер контроллера 5 и в следующем цикле вычислений извлекаются из него для обеспечения работы наблюдателя и используются для цифровой обработки сигналов энкодера в соответствии с описанным выше способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Способ определения угла поворота ротора синхронного электродвигателя с постоянными магнитами | 2020 |
|
RU2750334C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2582201C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Система управления электроприводом транспортного средства | 2018 |
|
RU2690532C1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2380719C2 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С СИНХРОННЫМ ДВИГАТЕЛЕМ БЕЗ ДАТЧИКА ПОЛОЖЕНИЯ РОТОРА | 2020 |
|
RU2746795C1 |
| Способ автофазировки датчика углового положения ротора электродвигателя системы лифтового привода | 2020 |
|
RU2758200C1 |
Группа изобретений относится к способу и устройству цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя-энкодера, которые могут быть использованы в электроприводе, в частности тяговом электроприводе транспортных средств различного вида и назначения. Для обработки информации об угловом положении ротора используется наблюдатель механических переменных состояния электропривода и прогнозатор, для функционирования которых предварительно до начала работы электропривода задают равными нулю начальные значения углового положения ротора электродвигателя, угловой скорости вращения ротора и момента нагрузки на валу электродвигателя, и начальный корректирующий сигнал прогнозатора. В течение каждого цикла вычислений получают измеренное значение углового положения ротора, рассчитывают предварительное значение корректирующего сигнала прогнозатора. Далее получают значение корректирующего сигнала прогнозатора и определяют прогнозируемое на начало следующего цикла вычислений значение углового положения ротора. Технический результат заявленной группы изобретений заключается в повышении точности оценивания углового положения и угловой скорости вращения ротора электродвигателя, что позволяет существенно улучшить характеристики системы управления приводом. 2 н. и 1 з.п. ф-лы, 2 ил.
1. Способ цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя-энкодера при помощи процессорного контроллера, обеспечивающий получение системой управления электропривода значений его механических переменных в течение k-го цикла вычислений контроллера, таких как угловое положение ротора электродвигателя Θk, угловая скорость вращения ротора nk и момент нагрузки на валу электродвигателя MLk, и предназначенный для получения точных оценок указанных переменных, заключающийся в том, что для обработки информации об угловом положении ротора используется наблюдатель механических переменных состояния электропривода и прогнозатор, для функционирования которых предварительно до начала работы электропривода задают равными нулю начальные значения оценок углового положения ротора электродвигателя Θ0, угловой скорости вращения ротора n0 и момента нагрузки на валу электродвигателя ML0, и начальный корректирующий сигнал прогнозатора S0, соответствующие состоянию отключенного электропривода, задают величину дискреты датчика Θd, зависящую от параметров зубчатого колеса энкодера, и вводят в буфер контроллера длительность цикла вычислений контроллера Т, совокупный момент инерции ротора электродвигателя J и значения корректирующих коэффициентов L1, L2, L3, в начале каждого цикла вычислений из системы управления электроприводом наблюдатель механических переменных состояния, входящий в состав контроллера, получает требуемое значение электромагнитного момента Mk, из энкодера после первичной обработки его сигнала получают количество импульсов на текущий интервал вычисления i, с помощью таймера осуществляют измерение и запись в буфер контроллера времени tk от прихода последнего импульса до начала текущего цикла вычислений, кроме того, в буфере сохраняют измеренное в прошлом цикле вычислений значение углового положения ротора электродвигателя Θk-1изм, полученные в прошлом цикле вычислений значение корректирующего сигнала прогнозатора Sk-1, и значения оценок углового положения ротора Θk, угловой скорости вращения ротора nk и момента нагрузки электродвигателя MLk, которые в данном цикле используются как его текущие значения, в течение каждого цикла вычислений получают измеренное значение углового положения ротора из выражения Θkизм=i·Θd, рассчитывают предварительное значение корректирующего сигнала прогнозатора S'k из выражения S'k=tk·nk, если Θkизм≠Θk-1изм, а в противном случае из выражения S'k=Sk-1+T·nk, и получают значение корректирующего сигнала прогнозатора Sk, равное Θd, если S'k>Θd, а в противном случае равное S'k, определяют прогнозируемое на начало следующего цикла вычислений значение углового положения ротора Θ*k из выражения Θ*k=Θkизм+Sk, и далее в наблюдателе рассчитывают значения оценок углового положения ротора, угловой скорости вращения ротора и момента нагрузки, применяемые для определения параметров системы управления электроприводом, согласно выражениям:
 ,
,
,
,
которые записывают в буфер контроллера и в следующем цикле вычислений используют для обеспечения работы наблюдателя механических переменных состояния.
2. Устройство цифровой обработки сигналов импульсного датчика перемещения ротора электродвигателя-энкодера при помощи процессорного контроллера, осуществляющее способ по п.1, включающее блок приема и первичной обработки сигналов энкодера, блок умножения числа импульсов энкодера на величину дискреты датчика, прогнозатор, представляющий собой совокупность таймера для измерения времени от последнего импульса в цикле до окончания цикла вычислений, блока расчета предварительного значения корректирующего сигнала прогнозатора, блока ограничения, предназначенного для определения значения корректирующего сигнала прогнозатора и сумматора значений измеренного углового положения ротора и корректирующего сигнала прогнозатора, а также процессорный контроллер, выполненный так, что включает по меньшей мере либо наблюдатель механических переменных состояния электропривода и буфер контроллера, либо по меньшей мере наблюдатель механических переменных состояния электропривода, буфер контроллера и прогнозатор, при этом связи между наблюдателем, буфером контроллера и прогнозатором в том и другом случае будут идентичны, причем выход энкодера соединен со входом блока приема и первичной обработки сигналов энкодера, выходы которого соединены со входами блока умножения и таймера, выход таймера соединен со входом буфера контроллера, с выхода которого значение дискреты датчика передается на вход блока умножения, выход которого соединен с первым входом сумматора, соответствующим измеренному значению углового положения ротора, а также со входами блока расчета предварительного значения корректирующего сигнала прогнозатора и буфера контроллера, который также имеет входы для записи значений корректирующего сигнала прогнозатора, рассчитанного в предыдущем цикле вычислений в блоке ограничения, оценок переменных, полученных в наблюдателе механических переменных состояния электропривода, вход для внешнего программирования и выходы, один из которых соединен со входом блока расчета предварительного значения корректирующего сигнала прогнозатора, второй - с одним из входов блока ограничения, выход блока расчета предварительного значения корректирующего сигнала прогнозатора соединен с другим входом блока ограничения, выход которого соединен со вторым входом сумматора, соответствующим корректирующему сигналу прогнозатора, а выход сумматора соединен с первым входом наблюдателя механических переменных состояния электропривода, на второй вход которого из системы управления электроприводом подают требуемое значение электромагнитного момента, и на выходах которого получают для передачи в систему управления электропривода и для записи в буфер контроллера значения оценок углового положения ротора, угловой скорости вращения ротора и момента нагрузки, которые в следующем цикле вычислений используют для обеспечения работы наблюдателя механических переменных состояния.
3. Устройство по п.2, в котором прогнозатор и процессорный контроллер образуют модульную конструкцию в случае, когда прогнозатор не входит в состав контроллера.
| Устройство для дозировки стеклянной изоляции цоколей источников света | 1989 |
|
SU1624563A1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| DE 19812966 A1, (Koller Peter), 30.09.1999 | |||

