Изобретение относится к управляющему и/или регулирующему устройству для эксплуатации трехфазного двигателя, который питается от 3-фазного инвертора, при этом устройство имеет управляющую и/или регулирующую структуру (сокращенно: структуру) с регулятором потока статора (то есть регулятор, который регулирует магнитный поток статора двигателя) и регулятором частоты скольжения или регулятором вращающего момента. Изобретение относится также к соответствующему способу эксплуатации питаемого от инвертора трехфазного двигателя, а также к рельсовому транспортному средству, в котором подобная структура управляет или регулирует приведение в действие тягового двигателя или двигателей.
WO 2008/052714 A1 описывает устройство с подобной структурой в качестве примера для трехфазного синхронного двигателя. Устройство или способ должны использоваться для сверхмощных применений, таких как, например, тяговые инверторы для снабжения тяговых двигателей рельсовых транспортных средств. Должна быть обеспечена возможность генерирования шаблона импульса на основе среднего или мгновенного значения, при этом при оптимальном использовании имеющегося в распоряжении входного напряжения инвертора должны выполняться высокие динамические требования, прежде всего, для тяговых применений у рельсовых транспортных средств. Настоящее изобретение относится, прежде всего, к тем же способам или управляющим и/или регулирующим устройствам и тем же применениям.
В системах управления и/или системах регулирования, которые, как и структура согласно изобретению, регулируют поток статора и вращающий момент или частоту скольжения, без дополнительных мер техники регулирования могут возникать недопустимо высокие амплитуды тока, которые могут привести к повреждению или разрушению инверторов или двигателя, если не предпринимаются никакие вторичные защитные мероприятия, такие как отключение при перегрузке по току инверторов. В альтернативных структурах, которые, например, регулируют образующие поток или образующие вращательный момент компоненты тока статора (например, описаны в WO 2005/018086), средствами техники регулирования может быть обеспечена защита от перегрузки по току путем подходящего ограничения заданного значения тока. В структурах с регулятором потока статора и регулятором частоты скольжения или регулятором момента вращения, напротив, ток статора непосредственно не регулируется, так что необходимы дополнительные меры для ограничения тока статора. Подобные известные до сих пор меры выполняют эту задачу лишь в недостаточной степени, так что более часто происходит срабатывание вторичных защитных мер по отключению при перегрузке по току.
Недопустимые амплитуды тока и тем самым дополнительные защитные отключения могут происходить, прежде всего, во время высокодинамичных процессов при эксплуатации двигателя, то есть при быстром изменении напряжения промежуточного контура, от которого питается тяговый инвертор или тяговые инверторы, при быстром изменении скорости вращения двигателя, при быстром изменении вырабатываемого двигателем вращающего момента и/или при быстром изменении требуемого магнитного потока в статоре двигателя.
В публикации "Schnelle Drehmomentregelung im gesamten Drehzahlbereich eines hochausgenutzten Drehfeldantriebs (Быстрое регулирование вращающего момента во всем диапазоне скоростей вращения высоконагруженного привода с вращающимся магнитным полем)", автор Dieter Maischak, Fortschrittsberichte, VDI-Reihe 8, Nr. 479, Düsseldorf, Deutschland, VDI-Verlag 1995, ISBN 3-18-347908-7, предложено ограничение заданной величины частоты скольжения системы регулирования до стационарной максимальной величины тока статора. При этом предполагается, что, прежде всего, магнитный поток двигателя не изменяется, то есть что производная по времени потока статора приблизительно равна нулю. Если же происходят быстрые изменения потока, то есть двигатель находится в нестационарном магнитном состоянии, то временно требуется сравнительно высокий ток намагничивания (это включает в себя случай размагничивания, то есть также отрицательный ток намагничивания) статора для регулирования потока. Ограничение частоты скольжения, в принципе, не может ограничить ток намагничивания и тем самым исключить надежно отключение от перегрузки по току вследствие высоких амплитуд тока намагничивания.
Поэтому с помощью предложенного Майшаком (Maischak) способа ток статора не во всех ситуациях эксплуатации двигателя (прежде всего, при одновременных требованиях к потоку и вращающему моменту, как это часто имеет место при эксплуатации рельсового транспортного средства) может быть надежно ограничен средствами техники регулирования до величины, которая в любое время делает возможной непрерывную эксплуатацию двигателя без вторичных мер защиты, таких как отключение при перегрузке по току инвертора. Прежде всего, при эксплуатации трамваев должно быть возможным в любое время с помощью тягового двигателя создать вращающий момент, противодействующий движению трамвая. Это динамическое торможение с помощью двигателя требуется из соображений безопасности в качестве второго независимого тормоза для того, чтобы не зависеть исключительно от механических тормозов транспортного средства. Если транспортное средство движется, например, в основном без силы тяги и должно быть быстро динамически заторможено, то одновременно требуется быстро увеличить поток статора и вырабатываемый двигателем вращающий момент. Однако для динамического торможения привод при запирании инвертора уже не может быть использован.
Еще один недостаток предложенного Майшаком способа заключается в том, что постоянное ограничение тока статора существенно зависит от параметров двигателя, которые во время эксплуатации изменяются как функция рабочей точки (амплитуда тока и/или температура ротора). Если величины параметров выбраны неправильно или недостаточно приспособлены к реальному рабочему состоянию, то часто может произойти так, что нужно будет предпринять выходящие за ограничение тока защитные меры, такие как запирание инвертора.
Задачей настоящего изобретения является создание управляющего и/или регулирующего устройства для эксплуатации трехфазного двигателя, который питается от 3-фазного инвертора, при этом устройство эффективно и надежно ограничивает ток статора до допустимых величин, при этом становится возможной высокая динамика при эксплуатации двигателя, и при этом предотвращается частое возникновение вторичных защитных мер, таких как отключение инвертора. Под током статора понимается ток через обмотку статора двигателя.
Согласно основной идее настоящего изобретения, внутри регулирующей структуры с регулировкой потока статора и регулировкой частоты скольжения (или альтернативно регулировкой потока статора и регулировкой вращающего момента) как создающий поток, так и создающий вращающий момент ток статора ограничивают посредством вмешательства в оба контура регулирования. В отличие от вышеупомянутого способа Майшака, в отношении намагничивания двигателя не предусмотрен никакой квазистационарный режим работы.
При этом для ограничения создающего вращающий момент тока подводимое к регулятору частоты скольжения (или регулятору вращающего момента) заданное значение ограничивается максимальной величиной (в дальнейшем: максимальная величина частоты скольжения или максимальная величина вращающего момента).
Благодаря ограничению как образующего поток, так и образующего вращающий момент тока статора путем вмешательства в контуры регулирования регулятора потока статора и регулятора частоты скольжения (или регулятора вращающего момента) автоматически, без дополнительных необходимых мероприятий решается также следующая проблема: поскольку общий ток через статор, то есть величина основного колебания тока статора, ограничен максимальной величиной, в случае известных из современного состояния техники способов должно быть задано, какой из образующих поток или образующих вращательный момент компонентов тока статора должен преимущественно сохраняться, то есть соответственно другой компонент должен быть уменьшен для того, чтобы поддерживать максимальную величину суммы основных колебаний тока статора. В решении согласно настоящему изобретению приоритет при уменьшении получается автоматически, без дополнительных мероприятий. Примеры осуществления для различных рабочих ситуаций, в которых должен быть уменьшен по меньшей мере один компонент тока статора, будут пояснены при описании фигур.
Далее, для ограничения образующего поток тока ограничивается до максимального значения скорость (в дальнейшем: максимальная скорость линейного изменения потока), с которой изменяется заданный поток статора (предпочтительно как к более высоким, так и более низким значениям потока). Это, предпочтительно, достигнуто за счет того, что изменение заданного значения на входе регулятора потока статора ограничивается посредством рампового элемента (то есть устройства, которое ограничивает изменение соответственно линейно изменяющемуся во времени значению (Zeitrampe)), если заданное значение соответствует слишком высокой скорости изменения. При этом скорость соответствует увеличению/уменьшению потока между двумя следующими рабочими циклами управляющего и/или регулирующего устройства.
Обе максимальные величины (максимальная величина частоты скольжения или максимальная величина вращающего момента и максимальная скорость линейного изменения потока (Flussrampeninkrement)) во время работы управляющего и/или регулирующего устройства заданы непрерывно или квазинепрерывно так, что не возникают недопустимо высокие амплитуды тока статора. Выражаясь иначе, по меньшей мере одна максимальная величина тока статора (прежде всего максимальная величина образующего поток компонента основного колебания тока статора и максимальная величина суммы основных колебаний тока статора) используется для того, чтобы вычислить максимальную величину скорости увеличения потока статора и максимальную величину вращающего момента или частоты скольжения и принять меры к тому, что обе эти максимальные величины (максимальная величина частоты скольжения или максимальная величина вращающего момента и максимальная скорость линейного изменения потока) не будут превышены.
Прежде всего, предлагается управляющее и/или регулирующее устройство для эксплуатации трехфазного двигателя, который питается от 3-фазного инвертора, при этом:
- устройство имеет структуру, а именно управляющую или регулирующую структуру,
- структура имеет регулятор потока статора и регулятор частоты скольжения или структура имеет регулятор потока статора и регулятор вращающего момента,
- структура имеет первое ограничительное устройство, которое выполнено так, чтобы для ограничения образующего вращающий момент основного колебания тока статора ограничивать подводимое к регулятору частоты скольжения или регулятору вращающего момента заданную величину до максимальной величины частоты скольжения или максимальной величины вращающего момента,
- структура имеет второе ограничительное устройство, которое выполнено так, чтобы для ограничения образующего поток основного колебания тока статора ограничивать скорость, с которой изменяется подводимая к регулятору потока статора заданная величина, до максимальной величины,
- структура выполнена так, чтобы вычислять максимальную величину частоты скольжения или максимальную величину вращающего момента в зависимости от заданной максимальной величины тока для суммы основных колебаний тока статора, то есть максимальной величины тока основного колебания (суммарного) тока статора (образованного q- и d-компонентами или разлагаемого на q- и d-компоненты) и в зависимости от отфильтрованной фактической величины образующего поток компонента (d-компонента) тока статора.
Далее предлагается способ эксплуатации трехфазного двигателя, который питается от 3-фазного инвертора, с использованием регулятора потока статора и регулятора частоты скольжения или с использованием регулятора потока статора и регулятора вращающего момента, при этом:
- для ограничения образующего вращающий момент компонента основного колебания тока статора подводимая к регулятору частоты скольжения или регулятору вращающего момента заданная величина ограничивается до максимальной величины частоты скольжения или максимальной величины вращающего момента,
- для ограничения образующего поток компонента основного колебания тока статора скорость, с которой изменяется подводимая к регулятору потока статора заданная величина, ограничивается до максимальной величины,
- максимальная величина частоты скольжения или максимальная величина вращающего момента вычисляется в зависимости от заданной максимальной величины тока основных колебаний тока статора и в зависимости от отфильтрованного фактического значения образующего поток компонента (d-компонента) основного колебания тока статора.
Варианты осуществления способа следуют из описания структуры и из прилагаемых пунктов формулы изобретения.
Особо преимущественно управляющее и/или регулирующее устройство применяется, когда трехфазный двигатель является асинхронным двигателем и структура имеет регулятор потока статора и регулятор частоты скольжения.
Соответствующие подходящие устройства в регулирующей структуре, которые обеспечивают соблюдение заданных максимальных величин основного колебания тока статора и образующего поток компонента тока, предпочтительно являются так называемыми ограничительными регуляторами. Под ними понимают регулятор, который при нормальной работе (то есть когда не превышена допустимая максимальная величина ограничительного регулятора) не оказывает никакого влияния на заданные величины, существенные для работы подчиненных регуляторов (в данном случае регулятора частоты скольжения, или регулятора вращающего момента, или регулятора потока статора). Если, наоборот, заданная величина превысит допустимую максимальную величину, работа ограничительного регулятора действует ограничивающе на заданную величину, так что превышение предотвращается посредством подчиненного контура регулирования. Подчиненным контуром регулирования в случае линейного изменения потока является контур регулирования регулятора потока, в случае максимальной величины частоты скольжения или максимальной величины вращающего момента - контур регулирования регулятора частоты скольжения или регулятора вращающего момента.
Под ограничением, прежде всего, понимается ограничение величины, то есть могут быть ограничены также вырабатываемые для торможения рельсового транспортного средства вращающие моменты. Ограничительный регулятор воздействует тем самым на заданные величины соответствующих сопряженных регуляторов, то есть он воздействует на приложенную к входу сопряженного регулятора заданную величину.
Ограничение скорости нарастания потока статора, предпочтительно, реализуется за счет того, что для каждого рабочего цикла структуры вычисляется допустимое изменение потока статора, то есть инкремент. Если разность заданных величин потока статора из предыдущего рабочего цикла, с одной стороны, и заданной величины потока статора в текущем рабочем цикле, с другой стороны, превышает инкремент, то заданная величина потока статора из текущего рабочего цикла ограничивается так, что максимальный допустимый инкремент не будет превышен.
Предпочтительно, для ограничения скорости изменения потока (то есть для поддержания максимальной скорости линейного изменения потока) используется структура ограничительного регулятора, к которой подводятся отфильтрованное значение фактической величины и максимальная величина образующего поток компонента (d-компонент в системе координат d-q с неподвижным ротором) потока статора. При этом речь идет, как и в других случаях, об относящемся к основным колебаниям компоненте, то есть без содержания гармоник. Предпочтительно этот ограничительный регулятор является П-регулятором, то есть регулятором, регулирующее воздействие которого пропорционально отклонению между заданной и фактической величиной (в данном случае - разность между заданной величиной и максимальной величиной образующего поток компонента тока статора) на входе регулятора.
Также является предпочтительным, что структура выполнена так, что разность предварительно отфильтрованной фактической величины образующего вращательный момент компонента (q-компонент, относительно основного колебания) тока статора и максимальной величины образующего вращательный момент компонента (относительно основного колебания) тока статора подводится к пропорционально-интегральному регулятору (ПИ-регулятору), выход которого связан с входом первого ограничительного устройства.
Ограничение тока статора согласно изобретению прежде всего применимо при высокодинамичных рабочих состояниях двигателя (например, при вышеупомянутом переходе от качения к динамическому торможению транспортного средства). Могут быть одновременно допущены высокие вращающие моменты и большие изменения потока статора.
Согласно еще одной идее изобретения при вычислении максимальной величины частоты скольжения или максимальной величины вращающего момента исходят не из того (как у Майшака, см. выше), что изменение потока магнитного потока приблизительно равно нулю, так как связанное с этим пренебрежение было идентифицировано как одна из причин частых отключений при перегрузке по току. Более того, при использовании отфильтрованной фактической величины (в противоположность использованному Майшаком стационарному току намагничивания) образующего поток тока основных колебаний (d-компонент в системе координат d-q с неподвижным ротором) и с использованием известных величин для максимальной величины суммарной величины основных колебаний тока статора вычисляется допустимая максимальная величина образующего вращающий момент тока статора (р-компонент в системе координат d-q). Из этого, в свою очередь, вычисляется допустимая максимальная величина частоты скольжения или вращающего момента.
Путем использования отфильтрованной фактической величины основного колебания вместо стационарного тока намагничивания для образующего поток компонента тока статора преодолено затруднение, что должны вычисляться или оцениваться максимальные величины как для d-компонента, так и для q-компонента тока статора, однако, как правило, для этого нет в распоряжении достаточной информации. Если, с другой стороны, будут использованы постоянные во времени максимальные величины как для d-компонента, так и для q-компонента, то не будет использована максимально возможная величина общего тока статора, что особенно важно при эксплуатации рельсовых транспортных средств.
Примеры осуществления изобретения будут теперь описаны со ссылками на прилагаемые чертежи, на которых:
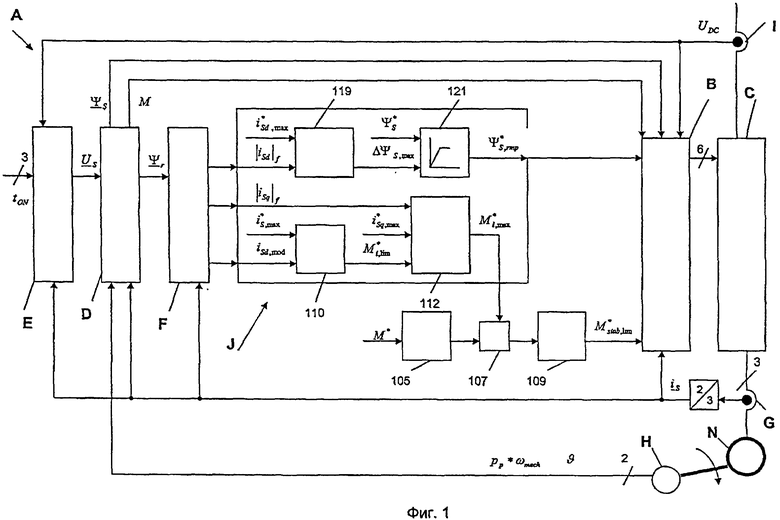
фиг.1 - устройство с трехфазным двигателем, который питается от 3-фазного инвертора, при этом работа инвертора и тем самым трехфазного двигателя регулируется регулирующей структурой,
фиг.2 - частичная структура регулирующей структуры согласно фиг.1, но с регулятором частоты скольжения вместо регулятора вращающего момента,
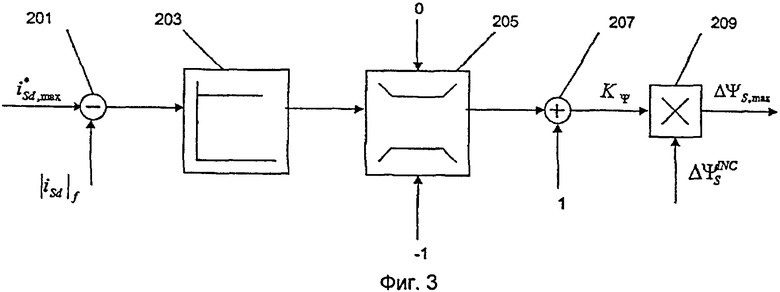
фиг.3 - предпочтительная форма осуществления показанного на фиг.2 ограничительного устройства для ограничения образующего поток компонента тока статора,
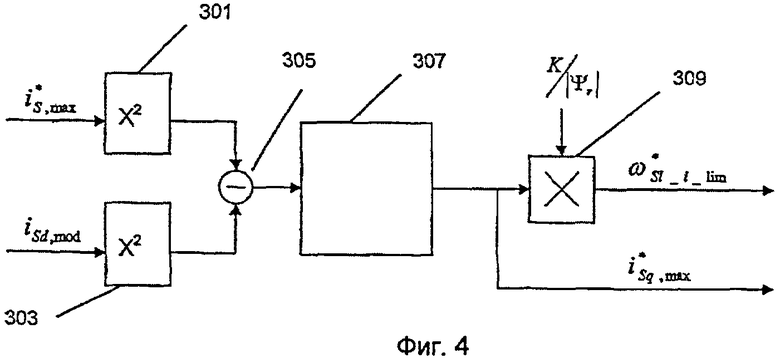
фиг.4 - предпочтительная форма осуществления показанного на фиг.2 устройства для вычисления максимальной величины заданной величины образующего вращающий момент компонента тока статора,
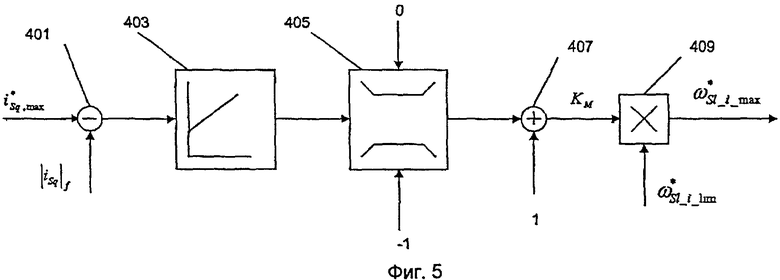
фиг.5 - предпочтительная форма осуществления показанного на фиг.2 ограничительного устройства для ограничения образующего вращающий момент компонента тока статора,
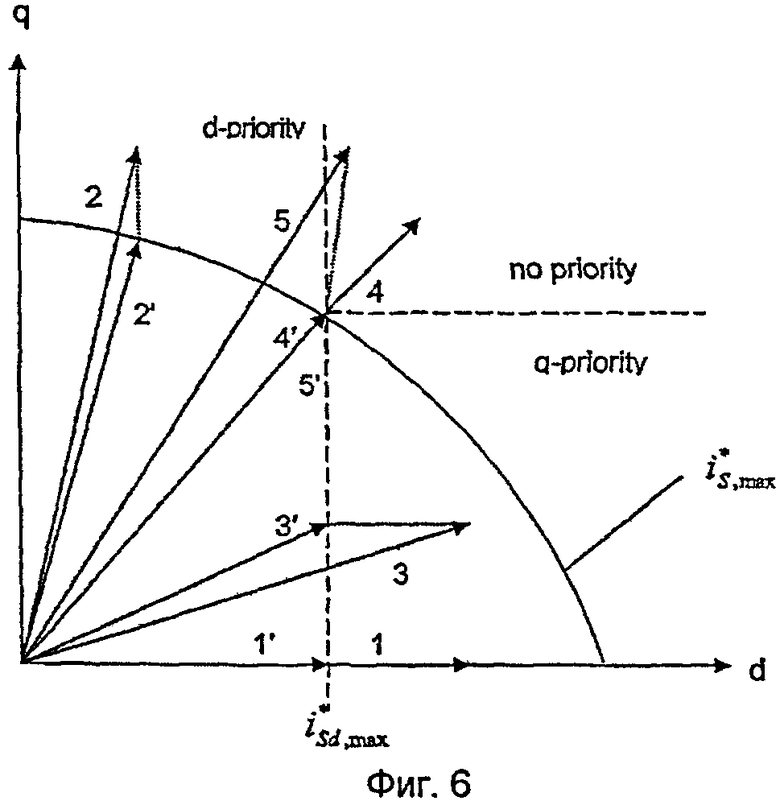
фиг.6 - представление различных рабочих ситуаций, при которых требуется слишком большой ток статора, при этом представление показывает квадрант в системе координат d-q с неподвижным ротором.
На фиг.1 показана структура А всего устройства регулирования привода трехфазного двигателя N, который может приводиться в действие по выбору с или без датчика скорости вращения или датчика угла поворота. В случае трехфазного двигателя речь может идти об асинхронном двигателе или о синхронном двигателе, предпочтительно с постоянным возбуждением. В частности, показаны и снабжены следующими ссылочными обозначениями: блок В, который содержит генератор шаблона импульса, регулятор момента вращения и регулятор потока, инвертор С (то есть 3-фазный инвертор), который принимает управляющие импульсы от блока В и соответственно обеспечивает двигатель N током через три фазы, устройство D для моделирования потокосцепления (поток статора и ротора), а также вращающего момента (датчик потока), устройство Е для вычисления выходного напряжения инвертора С, блок F, который имеет преобразователь измеренных величин тока по меньшей мере двух из трех фаз в систему координат d-q с фиксированным потоком ротора и фильтр для сглаживания величин тока. Соответствующее измерительное устройство для измерения значений фазы и тока обозначено как G. Измеренные величины тока через соответствующие соединительные линии подводятся как к устройству D, блоку F, блоку Е, так и к блоку В.
Дополнительно, предусмотрено измерительное устройство Н для измерения скорости вращения или угла поворота на двигателе N. Результат измерения или оценки скорости вращения или измерения или оценки угла поворота подводится к устройству D.
Также измерительное устройство I измеряет постоянное напряжение со стороны постоянного напряжения инвертора С и подводит его к блоку В и устройству Е.
Предпочтительный вариант осуществления настоящего изобретения реализуется посредством частичной структуры J, которая показана в центре фиг.1 и которая в незначительно модернизированном варианте более подробно описана при помощи фиг.2. При помощи фиг.1 описываются лишь точки сопряжения с другими частями структуры А.
Блок F подводит к структуре отфильтрованные абсолютные величины компонентов основного колебания тока в системе координат d-q с фиксированным потоком ротора, то есть величину 

Исходными величинами частичной структуры J являются заданные значения для обоих имеющихся в блоке В регуляторов, регулятора потока статора и регулятора вращающего момента. В случае варианта частичной структуры согласно фиг.2, вместо регулятора вращающего момента предусмотрен регулятор частоты скольжения. Частичная структура согласно фиг.2 выдает поэтому вместо величины вращающего момента М* заданную величину частоты скольжения ω*. Заданным значением для регулятора потока статора в обоих случаях является ограниченное по возрастанию значение Ψ*S,rmp, при этом под возрастанием понимается также снижение. Иначе говоря, скорость, с которой может возрастать или снижаться заданное значение потока статора, ограничивается частичной структурой J.
Генератор шаблона импульса в блоке В может быть, например, реализован внутри управляемой сигналами или микропроцессором сигнальной электронной схемы. Как более подробно описано в WO 2008/052714 A1, в нем может быть, прежде всего, реализован способ регулирования с основанным на средней величине генерированием шаблона импульса и апериодическим (Dead-Beat) поведением регулятора потока статора. Кроме того, он может содержать реализацию управляемого потоком статора основанного на мгновенной величине генератора шаблона импульса. Относительно других возможных вариантов выполнения структуры А также следует обратиться к WO 2008/052714 А1.
На фиг.2 показан упомянутый вариант частичной структуры J на примере предпочтительного варианта осуществления с подчиненным регулированием потока статора и регулированием частоты скольжения согласно фиг.1. Входными величинами кроме уже упомянутых при использовании фиг.1 отфильтрованных величин образующего поток и образующего вращающий момент тока основного колебания, а также отфильтрованной фактической величины образующего поток тока основного колебания являются заданное максимальное значение i*Sd,max образующего поток тока основного колебания и заданное значение М* вращающего момента двигателя N, а также максимальное значение iS,max суммарной величины основного колебания тока статора.
Вокруг показанной слева вверху на фиг.2 области частичной структуры нарисована прямоугольная рамка 101. Эта область содержит варианты исполнения существенных элементов настоящего изобретения. К ним относятся, прежде всего, ограничительные устройства для ограничения как образующего поток (d-компонент), так и образующего вращающий момент (q-компонент) тока основного колебания статора. Ограничительное устройство для d-компонента отмечено ссылочным обозначением 119, ограничительное устройство для q-компонента - ссылочным обозначением 112.
К ограничительному устройству 119 подводится отфильтрованная величина 

Вычитающее звено 122 образует разность между ограниченной заданной величиной Ψ*S,rmp величины потока статора и величиной 
В нижней части области 101 внутри частичной структуры, которая показана на фиг.2, показано вычислительное устройство 110, к которому в качестве входной величины подводится максимальная величина I*s,max величины основного колебания тока статора is и отфильтрованная фактическая величина ISd,mod образующего поток компонента основного колебания тока статора.
Вычисление внутри устройства 110 выполняется согласно следующим уравнениям:


Уравнение 1 описывает зависимость между квадратом величины iS основного колебания тока статора, то есть квадрата вектора тока статора в d-q системе координат с постоянным потоком ротора, с одной стороны, и суммы квадратов образующего поток статора компонента iSd тока и образующего вращающий момент компонента iSq тока в d-q системе координат. Все величины уравнения 1 относятся к основному колебанию, то есть без гармоник тока статора. При этом в уравнении используются величины, которые являются входными величинами или выходными величинами вычислительного устройства 110. Раскрытие скобок для исходной величины, заданного максимального значения i*Sq,max образующего вращающий момент компонента основного колебания тока (q-компонента), приводит к уравнению 2.
Кроме того, вычислительное устройство 110 выдает значение ω*Sl_i_lim частоты скольжения, которое получается умножением другой выходной величины на коэффициент К и делением на величину потока ротора Ψ. Обе эти выходные величины вычислительного устройства 110 подводятся как входные величины к ограничительному устройству 112 для ограничения образующего вращающий момент компонента основного колебания тока статора. Ограничительное устройство 112 получает, кроме того, в качестве входной величины величину отфильтрованного значения 
В качестве выходной величины ограничительное устройство 112 в случае варианта осуществления согласно фиг.2 выдает максимальную величину ω*Sl_i_max заданной величины частоты скольжения, которая допустима в текущем рабочем цикле. Эта максимальная величина подводится к ограничителю 107, который делает эффективным ограничение частоты скольжения. Под этим понимается, что заданная величина частоты скольжения ω*Sl будет ограничена до названной максимальной величины. Если заданная величина частоты скольжения в текущем рабочем цикле не больше, чем максимальная величина, или не меньше, чем отрицательное значение максимальной величины, то посредством ограничителя 107 не происходит никакого изменения заданной величины. В противном случае заданная величина уменьшается или увеличивается (с учетом знака) до максимальной величины или отрицательного значения максимальной величины.
В случае частичной структуры J согласно фиг.1, ограничительное устройство 112 вырабатывало бы максимальное значение для вращающего момента двигателя и выдавало на ограничитель 107.
Как более подробно показано внизу на фиг.2, могут дополнительно происходить дальнейшие ограничения величины вращающего момента и/или величины частоты скольжения.
Прежде всего, в показанном устройстве 103 может происходить пересчет величины М* вращающего момента в заданную величину частоты скольжения ω*Sl, и эта преобразованная величина перед ее подводом к ограничителю 107, следовательно, как неограниченная заданная величина в смысле ограничения ограничителем 107, может быть сначала ограничена в блоке 105, чтобы реализовать защиту двигателя от переброса, ограничение мощности двигателя, ограничение постоянного тока на входе инвертора и/или регулирование проскальзывания относительно возможного проскальзывания колес рельсового транспортного средства. В принципе подобные регулировки и ограничения могут быть альтернативно предприняты на выходном значении ограничителя 107, однако наиболее предпочтительным является пример осуществления согласно показанной на фиг.2 последовательности.
В примере осуществления согласно фиг.2, кроме того, реализовано так называемое отключение по напряжению пробоя для демпфирования колебаний в цепи постоянного напряжения со стороны постоянного напряжения инвертора С согласно фиг.1 в блоке 109. Более подробное описание отключения по напряжению пробоя находится, например, в DE 4110225. Выходная величина блока 109 (при наличии) или выходная величина ограничителя 107 подводится к вычитающему звену 111, которое образует разность относительно фактической величины ωSl частоты скольжения, и эта разность подводится как ошибка регулирования к регулятору 113 частоты скольжения. Вычитающее звено 111 и регулятор 113 частоты скольжения в случае варианта с регулятором частоты скольжения находились бы в блоке В на фиг.1. В случае регулятора вращающего момента ограничитель 107 выдает соответственно ограниченную заданную величину вращающего момента, вычитающее звено 111 образует разность относительно фактической величины вращающего момента и подводит разность как входную ошибку регулятора к регулятору вращающего момента.
На фиг.3 показан предпочтительный вариант осуществления представленного на фиг.1 ограничительного устройства 119 для ограничения образующего поток компонента iSd основного колебания тока статора. Ограничительное устройство вызывает ограничение за счет того, что ограничивается скорость нарастания магнитного потока. Как входные величины к структуре подводятся абсолютная величина 

На фиг.4 показан вариант осуществления вычислительного устройства 110 согласно фиг.2. Обе входные величины подводятся соответственно к квадратору 301 или 303, который возводит в квадрат входную величину согласно уравнению 1 или уравнению 2. Возведенные в квадрат величины подводятся к вычитающему звену 305, которое согласно уравнению 2 вычисляет аргумент квадратного корня с правой стороны уравнения. На выходе вычислительного устройства 307 поэтому имеется первая выходная величина вычислительного устройства 110, а именно максимальная заданная величина i*Sq,max образующего вращающий момент компонента основного колебания тока. Как уже описано, эта первая выходная величина путем умножения на коэффициент К и деления на величину потока ротора 

При этом обозначают: 

На фиг.5 показан вариант осуществления ограничительного устройства 112 согласно фиг.2. К ограничительному устройству 112, как упоминалось, в качестве входных величин подводят максимальную заданную величину i*Sq,max образующего поток компонента (q-компонента) основного колебания тока статора и отфильтрованную величину фактической величины 
Выходная величина регулятора 403 подводится к ограничителю 405, который ограничивает нормированную соответственно выбранному коэффициенту пропорциональности регулятора 403 выходную величину регулятора в диапазоне от -1 до 0. Ограниченная таким образом выходная величина ограничителя 405 подводится к сумматору 407, который добавляет величину 1, так что выходная величина сумматора 407, которая обозначена как КМ, ограничивается диапазоном величин от 0 до 1. Умножителем 409 эта величина КМ последовательно подключенным умножителем 409 умножается со второй выходной величиной вычислительного устройства 110, максимальной заданной величиной ω*Sl_i_lim частоты скольжения, так что в качестве выходного значения получается соответствующая ограниченная максимальная величина ω*Sl_i_max. Как было описано при помощи фиг.2, эта выходная величина подводится к ограничителю 107.
На фиг.6 показан первый квадрант системы координат q-d с неподвижным ротором. Поэтому по горизонтальной оси, d-оси, увеличивается образующий поток или намагничивающий компонент iSd тока статора. Вдоль q-оси, вертикальной оси, увеличивается компонент iSq образующего вращающий момент тока статора.
Четверть окружности в квадранте, центр которой находится в начале системы координат d-q, соответствует допустимой максимальной величине общей величины основного колебания тока статора I*S,max. Поэтому ни один из пространственных векторов тока (называемых также векторами тока), которые распространяются через квадрант, исходя из начала, и которые соответствуют одному требованию тока, не может распространяться за четверть окружности. Это имеет место в случае обозначенных цифрами 2, 4 и 5 векторов тока. Поэтому вмешивается ограничительное регулирование согласно изобретению и уменьшает эти пространственные векторы тока, как это еще будет более подробно описано ниже. При этом может изменяться не только величина соответствующего пространственного вектора тока, но и в зависимости от ситуации также его направление.
Кроме того, существует максимальная величина образующего поток компонента основного колебания тока статора, которая показана на фигуре вертикальной штриховой линией. Максимальная величина обозначена условным обозначением i*Sd,max. Два из векторов тока, которые обозначены цифрами 1 и 3, заканчиваются внутри четверти окружности допустимой величины основного колебания суммарного тока iS,max. Однако они выступают за вертикальную штриховую линию в месте i*Sd,max, то есть превышают граничную величину максимально допустимого образующего поток тока основного колебания. Как будет еще более подробно описано, эти векторы тока будут ограничены до допустимого пространственного вектора одним только уменьшением образующего поток компонента iSd тока.
Кроме максимального значения величины основного колебания суммарного тока статора существует также, как показано на фиг.6, максимальная величина образующего поток компонента тока iSd. Согласно предпочтительному варианту осуществления изобретения, посредством отдельного ограничительного регулятора гарантируется соблюдение граничной величины во время изменения потока (см. фиг.2 и 3). Благодаря принципу действия этого ограничительного регулятора (в примере осуществления на фиг.3 с П-регулятором) граничная величина может быть, однако, время от времени незначительно превышена.
В дальнейшем согласно фиг.6 будут обсуждены различные ситуации, вызванные слишком высокими требованиями к току. В случае пространственного вектора тока 1 требуется ток, который содержит исключительно образующий поток компонент тока. Хотя конец требуемого пространственного вектора тока находится в пределах четверти окружности, то есть максимальная величина основного колебания суммарного тока статора не превышена, однако граничная величина i*Sd,,max для образующего поток компонента основного колебания тока превышена. Поэтому благодаря принципу действия отдельного регулятора ток соответственно уменьшается до обозначенного 1′ вектора тока.
Аналогичный случай представляют собой пространственные векторы тока, которые обозначены символами 3 и 3′. Этот случай отличается от случая 1 только тем, что оба пространственных вектора тока, слишком высоко затребованный и уменьшенный пространственный вектор тока, имеют также образующий момент вращения компонент тока. Этот образующий вращательный момент компонент тока остается постоянным, то есть на него не влияет изменение вектора тока. Путем ограничения образующего поток компонента оказывается воздействие лишь на то, что образующий поток компонент больше не превышает граничную величину iSd,max. Случаи 1 и 3 имеют затребованный вектор тока, конец которого находится в области первого квадранта системы координат d-q, которая обозначена как "q-priority". Как только что было описано, при уменьшении затребованного вектора тока до допустимого вектора тока q-компонент, то есть образующий вращающий момент компонент iSq тока, остается не затронутым. Поэтому он имеет приоритет перед образующим поток компонентом iSd тока. Эта область с q-приоритетом заканчивается слева от максимальной величины I*Sd,max образующего поток компонента тока. Сверху эта область с q-приоритетом заканчивается на горизонтальной линии, которая проходит через точку пересечения линии максимальной величины I*Sd,max с четвертью окружности. Непосредственно над областью с q-приоритетом, также справа от вертикальной штриховой линии для iSd,max, находится область без приоритета. Если конец затребованного пространственного вектора тока находится в этой области, то пространственный вектор тока уменьшается при изменении как d-компонента, так и q-компонента тока статора. Этот вид ограничения пространственного вектора называется также правильным в отношении угла ограничением (winkelrichtige Begrenzung). Ему соответствуют на представлении на фиг.6 два примера. В случае затребованного пространственного вектора тока 4 этот пространственный вектор пересекает четверть окружности максимальной величины суммарного тока статора точно на граничной линии области с q-приоритетом и области без приоритета ("no priority"). Поскольку путем ограничения до максимальной величины образующего поток тока и путем ограничения до максимальной величины i*S,max суммарного тока статора будет достигнут пространственный вектор тока, который кончается точно в этой точке пересечения пространственного вектора тока 4 с четвертью окружности, то в случае 4 не будет предпринято никакого изменения направления вектора, то есть, как упомянуто выше, правильное в отношении угла ограничение.
Напротив, в случае пространственного вектора тока 5 в свою очередь происходит подобное изменение направления. Пространственный вектор тока 5 также уменьшится до допустимого пространственного вектора тока, который заканчивается в точке пересечения граничной линии обеих названных областей приоритета или области без приоритета и четверти окружности. Эта заканчивающаяся там стрелка поэтому помечена ссылочными обозначениями 4′ и 5′.
Над четвертью окружности и слева от максимальной величины образующего поток компонента тока I*Sd,max находится область с d-приоритетом (на изображении обозначена как "d-priority"). Там заканчивается в примере осуществления затребованный сектор 2. Он с помощью ограничительного устройства согласно изобретению уменьшен до допустимого вектора тока 2′, который имеет тот же самый образующий поток компонент iSd ток, однако уменьшенный соответственно допустимой максимальной величине основного колебания суммарного тока статора компонент тока. Так как, таким образом, не происходит уменьшения образующего поток компонента тока, эта область правильно обозначена как область с d-приоритетом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ И/ИЛИ РЕГУЛИРОВАНИЕ ТРЕХФАЗНОГО ПРЕОБРАЗОВАТЕЛЯ ЭЛЕКТРОЭНЕРГИИ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АСИНХРОННОЙ МАШИНЫ | 2007 |
|
RU2455751C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОРОМ | 2011 |
|
RU2578165C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2222097C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ И МАГНИТНЫМ ПОТОКОМ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2469459C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
Изобретение относится к области электротехники и может быть использовано для управления и/или регулирования при эксплуатации трехфазного двигателя. Технический результат - повышение эффективности и надежности ограничения тока статора при высокой динамике при эксплуатации двигателя. Трехфазный двигатель питается от 3-фазного выпрямителя тока с использованием регулятора (123) тока статора и регулятора (113) частоты скольжения или с использованием регулятора тока статора и регулятора вращающего момента. Для ограничения образующего вращающий момент компонента тока основного колебания тока статора, то есть тока через статор двигателя (N), подводимую к регулятору (113) частоту скольжения или регулятору вращающего момента заданную величину (ω*Sl) ограничивают до максимальной величины (ω*Sl_i_max) частоты скольжения или максимальной величины вращающего момента; для ограничения образующего поток компонента тока основного колебания тока статора ограничивают скорость, с которой изменяется подведенная к регулятору (123) потока статора заданная величина (ψ*S), до максимальной величины (ΔψS,max, на выходе от 119). Максимальную величину (ω*Sl_i_max) частоты скольжения или максимальную величину вращающего момента вычисляют в зависимости от заданной максимальной величины (iS,max) тока для величины основного колебания тока статора и в зависимости от отфильтрованной фактической величины (|iSd|f) образующего поток компонента (iSd) тока основного колебания тока (iS) статора. 2 н. и 8 з.п. ф-лы, 6 ил.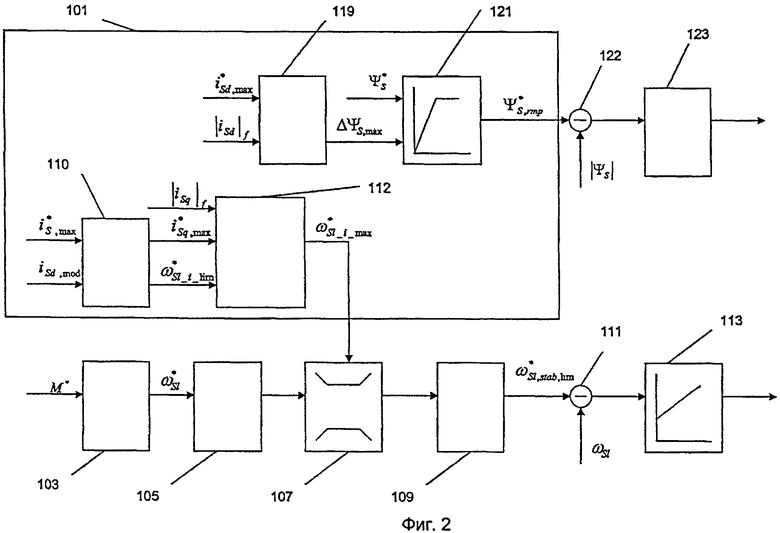
1. Управляющее и/или регулирующее устройство для эксплуатации трехфазного двигателя (N), который питается от 3-фазного инвертора (С), при этом
- устройство имеет структуру (А), а именно управляющую и/или регулирующую структуру,
- структура (А) имеет регулятор (123) потока статора и регулятор (113) частоты скольжения или структура (А) имеет регулятор (123) потока статора и регулятор вращающего момента,
- структура (А) имеет первое ограничительное устройство (107), которое выполнено так, чтобы для ограничения образующего вращающий момент компонента (iSq) основного колебания тока (iS) статора, то есть тока через статор двигателя (N), ограничивать подведенную к регулятору (113) частоты скольжения или регулятору вращающего момента заданную величину (ω*Sl) до максимальной величины (ω*Sl_i_max) частоты скольжения или максимальной величины вращающего момента,
- структура (А) имеет второе ограничительное устройство (121), которое выполнено так, чтобы для ограничения образующего поток компонента (iSd) основного колебания тока (iS) статора ограничивать скорость, с которой изменяется подведенная к регулятору (123) потока статора заданная величина, до максимальной величины (ΔΨS,max),
- структура (А) выполнена так, чтобы вычислять максимальную величину (ω*Sl_i_max) частоты скольжения или максимальную величину вращающего момента в зависимости от заданной максимальной величины (iS,max) тока для величины основного колебания тока статора и в зависимости от образованной посредством фильтрации измеренных величин тока тока (iS) статора фактической величины ( ) соответственно образующему поток компоненту основного колебания тока (is) статора.
) соответственно образующему поток компоненту основного колебания тока (is) статора.
2. Управляющее и/или регулирующее устройство по п.1, при этом структура выполнена так, чтобы подводить разность образованной посредством фильтрации измеренных величин тока тока (iS) статора фактической величины ( ) соответственно образующему вращающий момент компоненту тока основного колебания тока (is) статора и максимальной величины (iSq,max) образующего вращающий момент компонента тока основного колебания тока статора к регулирующему устройству (401-409) с пропорционально-интегральным регулятором (403), при этом выход регулирующего устройства (401-409) соединен с входом первого ограничительного устройства (107).
) соответственно образующему вращающий момент компоненту тока основного колебания тока (is) статора и максимальной величины (iSq,max) образующего вращающий момент компонента тока основного колебания тока статора к регулирующему устройству (401-409) с пропорционально-интегральным регулятором (403), при этом выход регулирующего устройства (401-409) соединен с входом первого ограничительного устройства (107).
3. Управляющее и/или регулирующее устройство по п.1 или 2, при этом структура выполнена так, чтобы подводить разность отфильтрованной фактической величины () образующего поток компонента тока основного колебания тока статора и максимальной величины (iSd,max) образующего поток компонента тока основного колебания тока статора к регулирующему устройству (201-209) с пропорциональным регулятором (203), при этом выход регулирующего устройства (201-209) соединен с входом второго ограничительного устройства (121).
4. Управляющее и/или регулирующее устройство по п.1 и 2, при этом трехфазный двигатель (N) является асинхронным двигателем, и при этом структура (А) имеет регулятор (123) потока статора и регулятор (113) частоты скольжения.
5. Управляющее и/или регулирующее устройство по п.3, при этом трехфазный двигатель (N) является асинхронным двигателем, и при этом структура (А) имеет регулятор (123) потока статора и регулятор (113) частоты скольжения.
6. Способ эксплуатации трехфазного двигателя (N), который питается от 3-фазного инвертора (С), с использованием регулятора (123) потока статора и регулятора (113) частоты скольжения или с использованием регулятора (123) потока статора и регулятора вращающего момента, при этом:
- для ограничения образующего вращающий момент компонента тока основного колебания тока статора, то есть тока через статор двигателя (N), подводимую к регулятору (113) частоты скольжения или регулятору вращающего момента заданную величину (ω*Sl) ограничивают до максимальной величины (ω*Sl_i_max) частоты скольжения или максимальной величины вращающего момента,
- для ограничения образующего поток компонента тока основного колебания тока статора ограничивают скорость, с которой изменяется подведенная к регулятору (123) потока статора заданная величина (Ψ*S), до максимальной величины (ΔΨS,max),
- максимальную величину (ω*Sl_i_max) частоты скольжения или максимальную величину вращающего момента вычисляют в зависимости от заданной максимальной величины (i*S,max) тока для величины основного колебания тока статора и в зависимости от образованной посредством фильтрации измеренных величин тока (iS) статора фактической величины () соответственно образующему поток компоненту основного колебания тока (is) статора.
7. Способ по п.6, при этом разность образованной посредством фильтрации измеренных величин тока тока (iS) статора фактической величины () соответственно образующему вращающий момент компоненту основного колебания тока (is) статора и максимальной величины (i*Sq,max) образующего вращающий момент компонента тока основного колебания подводят к регулирующему устройству (401-409) с пропорционально-интегральным регулятором (403), и при этом выходную величину регулирующего устройства (401-409) подводят к входу первого ограничительного устройства (107) для ограничения образующего вращающий момент компонента (iSq) основного колебания тока статора.
8. Способ по п.6 и 7, при этом разность отфильтрованной фактической величины () образующего поток компонента тока основного колебания тока статора и максимальной величины (i*Sd,max) образующего поток компонента тока основного колебания тока статора подводят к регулирующему устройству (201-209) с пропорциональным регулятором (203), и при этом выходную величину регулирующего устройства (201-209) подводят к входу второго ограничительного устройства (121) для ограничения образующего поток компонента тока основного колебания тока статора.
9. Способ по п.6 и 7, при этом трехфазный двигатель (N) является асинхронным двигателем, и при этом двигатель управляется и/или регулируется с использованием регулятора (123) потока статора и регулятора (113) частоты скольжения.
10. Способ по п.8, при этом трехфазный двигатель (N) является асинхронным двигателем, и при этом двигатель управляется и/или регулируется с использованием регулятора (123) потока статора и регулятора (113) частоты скольжения.
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2284645C1 |
| US 6242885 B1, 05.06.2001 | |||
| WO 1984001063 A1, 15.03.1984 | |||
| WO 2005018085 A, 24.02.2005 | |||
| WO 2008052714 A1, 08.05.2008 | |||
| Устройство для резки клубней семенного картофеля | 1981 |
|
SU1014558A1 |

