Изобретение относится к векторному управлению асинхронным электродвигателем и может быть использовано на электроподвижном составе с тяговым асинхронным двигателем, получающим питание от контактной сети постоянного тока, в частности для рельсового транспортного средства.
Известно регулирующее устройство для привода с асинхронным электродвигателем (Железные дороги мира, №9, 1983 г., стр.6-9), содержащее взаимодействующие контуры: контур регулирования амплитуды тока статора двигателя и контур регулирования его частоты. Контур регулирования амплитуды тока статора двигателя состоит из устройства сравнения задающей величины тока с его регулируемой величиной, регулятора тока статора двигателя, широтно-импульсного модулятора, инвертора напряжения, соединенного с двигателем, и вычислителя регулируемой величины тока по мгновенным значениям регулируемых токов фаз двигателя. Контур регулирования частоты состоит из функционального преобразователя, формирующего задающую величину магнитного потока, умножителя, вычисляющего задающую величину э.д.с. в соответствии с величиной задающего магнитного потока и частотой тока статора двигателя, узла сравнения задающей величины с регулируемой величиной э.д.с, сформированной вычислителем сигнала обратной связи по э.д.с. в соответствии с мгновенными значениями линейных напряжений двигателя, регулятора э.д.с. статора двигателя, сумматора частоты скольжения и вращения ротора, выход которого соединен с другими входами широтно-импульсного модулятора и умножителя, соответственно.
Недостатком данного устройства является невозможность обеспечения максимально возможной мощности привода в процессе его работы. Это объясняется тем, что данное устройство, для обеспечения заданной регулируемой величины тока, осуществляет ограничение задающей величины э.д.с. двигателя путем параметрического регулирования величины задающего магнитного потока двигателя. Такое параметрическое регулирование нелинейно зависит от целого ряда переменных привода и соответственно имеет низкую точность. Поэтому для обеспечения работы привода в таких устройствах ограничение задающей величины э.д.с. двигателя выполняют на уровне ниже допустимого с большим запасом. Это не позволяет реализовать максимально возможную мощность тягового привода.
Технический результат изобретения заключается в обеспечении максимально возможной мощности асинхронного двигателя при штатных изменениях напряжения в тяговой электрической сети, а также в поддержании заданной величины тока двигателя без колебаний.
Технический результат достигается тем, что регулирующее устройство для привода с асинхронным двигателем, содержащее взаимодействующие контуры регулирования амплитуды тока статора двигателя и регулирования его частоты, при этом контур регулирования амплитуды тока статора двигателя включает узел сравнения задающей величины тока с его регулируемой величиной, регулятор тока статора двигателя, широтно-импульсный модулятор, инвертор напряжения соединенный с двигателем и вычислитель регулируемой величины тока по мгновенным значениям регулируемых токов фаз двигателя, а контур регулирования частоты включает функциональный преобразователь, формирующий задающую величину магнитного потока, умножитель, вычисляющий задающую величину э.д.с. в соответствии с величиной задающего магнитного потока и частотой тока статора двигателя, узел сравнения задающей величины с регулируемой величиной э.д.с., сформированной вычислителем сигнала обратной связи по э.д.с. в соответствии с мгновенными значениями линейных напряжений двигателя, регулятор э.д.с. статора двигателя, сумматор частоты скольжения и вращения ротора, выход которого соединен с другими входами широтно-импульсного модулятора и умножителя, согласно изобретению регулирующее устройство дополнительно содержит устройство ограничения задающей величины э.д.с. двигателя, включающее узел сравнения выходного сигнала регулятора тока с заданным максимально возможным значением его величины, соединенный с интегральным регулятором, и узел выбора минимальной величины, входы которого соединены с выходами интегрального регулятора и умножителя, соответственно, а выход соединен со входом задающей величины устройства сравнения э.д.с., а также тем, что вход функционального преобразователя соединен с задающей величиной тока статора двигателя.
Ниже изобретение более подробно поясняется, но не ограничивается описанием лучшего варианта выполнения и чертежами, на которых показаны:
на фиг.1 - блок-схема регулирующего устройства для привода с асинхронным двигателем;
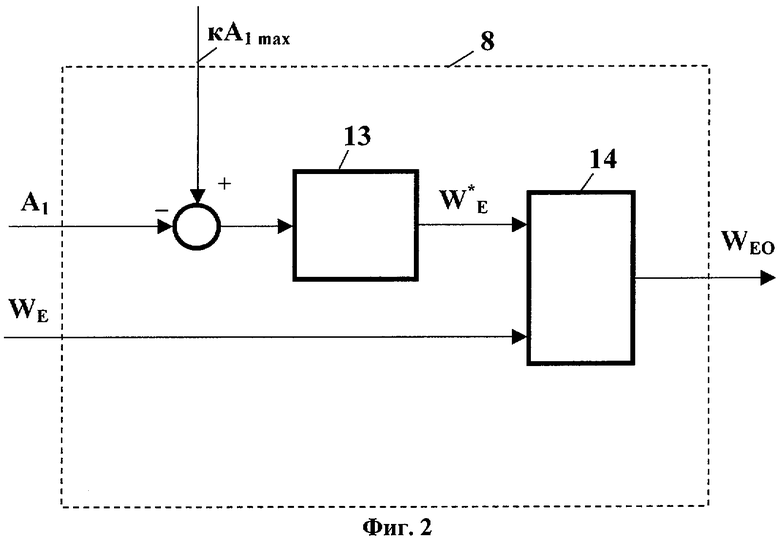
на фиг.2 - структурная схема устройства ограничения э.д.с, показанного на фиг.1.
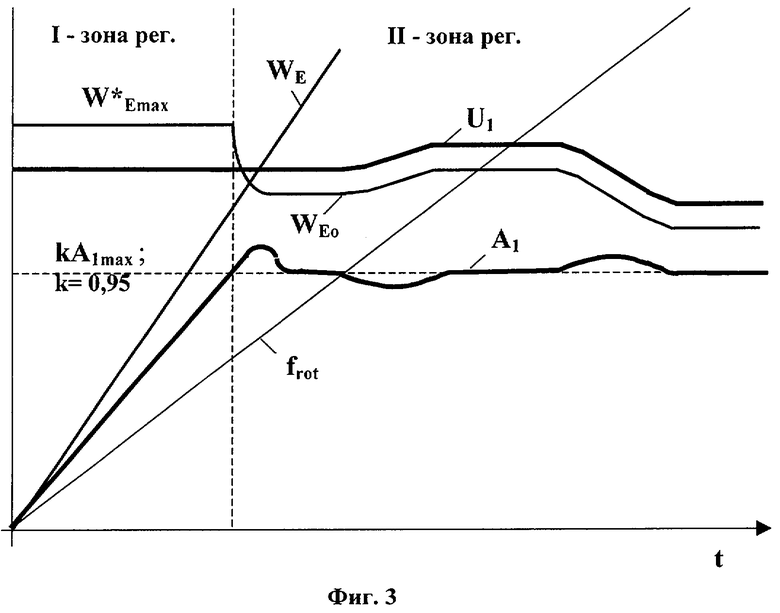
на фиг.3 - диаграммы работы устройства ограничения э.д.с.
Регулирующее устройство для привода с асинхронным двигателем содержит взаимодействующие контуры: контур регулирования амплитуды тока статора двигателя и контур регулирования его частоты. Контур регулирования амплитуды тока статора двигателя включает в себя узел сравнения заданного значения тока статора двигателя Wi с его регулируемой величиной Xi, соединенный с регулятором тока статора двигателя 1 (РТ), выходной сигнал с которого AI поступает на силовой преобразователь, содержащий последовательно соединенные блок широтно-импульсной модуляции 2 (ШИМ) и автономный инвертор напряжения 3 (АИН), преобразующий напряжение постоянного тока = U1 в трехфазное напряжение переменного тока в соответствии с импульсными сигналами Z управления переключающими элементами АИН, поступающими на его вход. К выходам автономного инвертора напряжения 3 подключен тяговый асинхронный двигатель 4 и вычислитель 5 сигнала обратной связи по току двигателя Xi, на входы которого поступают мгновенные значения регулируемых токов фаз двигателя iA и iB. Выходной сигнал с узла сравнения, поступающий на вход регулятора тока статора двигателя 1, является задающей величиной амплитуды переменного тока двигателя IM.
Контур регулирования частоты включает функциональный WФ=f(WI) преобразователь 6 (ФП), формирующий значение магнитного потока статора WФ, соответствующее сигналу WI, задающему величину тока двигателя, поступающему на его вход; умножитель 7, в котором задающую величину магнитного потока статора WФ умножают на сигнал регулируемой частоты тока статора двигателя f1 и получают сигнал задающей величины э.д.с. статора двигателя WE; устройство ограничения э.д.с. 8 (УОЕ), обеспечивающее работу регулирующего устройства для привода с асинхронным двигателем в зоне регулирования двигателя с постоянством мощности при частоте вращения двигателя выше номинальной и формирующее ограниченное значение задающей величины э.д.с. WEO в зависимости от значений сигналов WE, A1 и kA1max, поступающих на его входы; узел сравнения WEO с регулируемой величиной э.д.с. XE, поступающей с вычислителя 9 (ВЕ), сигнала обратной связи по э.д.с. двигателя, и сформированный из сигналов линейных напряжений двигателя UAB и UCA; регулятор 10 э.д.с. статора двигателя, соединенный с выходом узла сравнения, формирует выходной сигнал, служащий мерой регулируемой частоты скольжения f2, определяющей рабочий режим двигателя; сумматор 11, соединенный с выходами регулятора 10 и датчика 12 частоты вращения ротора двигателя frot. Выходной сигнал с сумматора 11 поступает на входы умножителя 7 и блок широтно-импульсной модуляции 2, соответственно, в качестве задающей величины частоты тока статора двигателя f1.
Устройство ограничения э.д.с. (фиг.2) включает в себя узел сравнения выходного сигнала регулятора тока A1 со значением его требуемой величины kA1max; интегральный регулятор 13 (ИР), соединенный с выходом узла сравнения, формирующий выходной сигнал ограниченной задающей величины э.д.с. W*E; узел выбора сигнала минимальной величины 14 (MB), который соединен с выходами интегрального регулятора и умножителя 7 и осуществляет сравнение W*E и WE и выбор меньшей из этих величин, являющейся выходным сигналом WEO.
На фиг.3 представлены временные диаграммы работы устройства ограничения э.д.с. в двух зонах регулирования: I - зона регулирования с постоянством момента; II - зона регулирования с постоянством мощности.
Устройство ограничения э.д.с. 8 предназначено для обеспечения работы привода в зоне регулирования двигателя с постоянством мощности при частоте вращения выше номинальной.
Критериями качества работы тягового привода в этой зоне являются:
- устойчивая работа привода;
- способность поддерживать заданную величину тока двигателя без колебаний;
- при штатных изменениях напряжения в тяговой электрической сети реализовывать максимально возможную мощность.
Ток двигателя IM определяется разностью между выходным напряжением АИН и э.д.с. машины, отнесенной к сумме омических сопротивлений в контуре тока. Поэтому для регулирования тока двигателя его э.д.с. должна быть всегда меньше выходного напряжения инвертора. В противном случае регулятор тока войдет в насыщение, в токе и моменте двигателя возникнут низкочастотные колебания с существенной потерей тягового или тормозного усилия.
Для исключения этого в тяговых приводах вводится вторая зона регулирования. В этой зоне с ростом частоты вращения ослабляют магнитный поток двигателя, чтобы э.д.с. машины не превысила выходное напряжение АИН 3, ограниченное напряжением тяговой сети, то есть необходимо иметь запас по напряжению на регулирование тока двигателя.
Регулирование амплитуды тока двигателя производится путем изменения скважности проводимости силовых транзисторов АИН 3 по сигналу регулятора тока AI. Эта величина напрямую характеризует наличие запаса на регулирование тока. Если величина A1 приближается к своему максимальному значению, например превышает 0,95A1max, то рост задающей величины э.д.с. WE необходимо ограничить.
Ограничение производится следующим образом.
При пуске и разгоне привода сигналы WE и A1 с ростом частоты вращения frot начинают возрастать. Пока A1<kA1max (k задают перед началом работы в диапазоне от 0,9-0,95) интегральный регулятор 13 находится в насыщении. При этом W*E=W*Emax>WE и на выход устройства 8 проходит задающая величина э.д.с. WE, т.е. WEO=WE. При дальнейшем увеличении скорости, когда A1 становится больше 0,9А1mах интегральный регулятор 13 выходит из насыщения и начинает регулировать задающую величину W*E в функции A1=kA1max. При этом W*E становится меньше WЕ и проходит на выход устройства 8 в качестве задающей величины э.д.с., WEO=W*E. Описанное выше отражено на диаграммах фиг.3.
Таким образом, устройство ограничения э.д.с. представляет собой интегральный регулятор, который автоматически подстраивает задающую величину э.д.с. W*E под напряжение тяговой сети U1, обеспечивая при этом работу привода с максимально возможной мощностью.
Силовой преобразователь может быть выполнен, например, на IGBT модулях фирмы "Eupec". Все вычислительные и управляющие функции, согласно блок схеме фиг.1, могут выполнять, например, два контроллера фирмы "Texas Instruments".
В качестве датчиков электрических величин могут быть использованы, например, датчики тока и напряжения фирмы "LEM".
Регулирующее устройство для привода с асинхронным двигателем работает следующим образом.
Сигналы задающей W1 и регулируемой X1 величин тока статора двигателя поступают на узел сравнения. С выхода узла сравнения сигнал рассогласования подается на регулятор тока 1. Выходной сигнал регулятора AI поступает на вход блока широтно-импульсной модуляции 2, далее на инвертор напряжения 3 в качестве задающей величины амплитуды переменного тока двигателя IM.
Сигнал задающей величины тока двигателя WI поступает также на функциональный преобразователь 6, который формирует значение магнитного потока статора двигателя, соответствующее току для выбранного способа регулирования двигателя 4. Задающую величину потока WФ умножают в блоке 7 на сигнал регулируемой частоты тока статора двигателя f1 и получают сигнал задающей величины э.д.с. статора двигателя WE.
Сигнал WE поступает на вход устройства ограничения э.д.с. 8. При частоте f1 ниже номинальной (1-я зона регулирования с постоянством момента) сигнал WE проходит на выход устройства 8 без изменения.
При частоте f1 выше номинальной (2-я зона регулирования с постоянством мощности) сигнал WE ограничивается устройством ограничения э.д.с. 8 на уровне WEO и поступает в узел сравнения, где сравнивается с регулируемой величиной э.д.с. XЕ. Сигнал XE формируется в вычислителе 9 из сигналов линейных напряжений двигателя UAB, UCA. С выхода узла сравнения сигнал рассогласования подается на регулятор э.д.с. 10. Выходной сигнал регулятора служит мерой регулируемой частоты скольжения f2, определяющей рабочий режим двигателя. В узле 11 этот сигнал суммируется с сигналом датчика 12 частоты вращения ротора двигателя frot и поступает на один из входов блока широтно-импульсной модуляции 2 и далее на инвертор напряжения в качестве задающей величины частоты тока статора двигателя f1.
Благодаря формированию сигнала скольжения двигателя f2 в функции поддержания сигнала э.д.с. WEO автоматически происходит компенсация воздействия температурных изменений сопротивления ротора двигателя на процесс регулирования; автоматически происходит переход работы привода из зоны регулирования с постоянством момента в зону регулирования с постоянством мощности при ослаблении магнитного поля машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ГИБКИМ ОГРАНИЧЕНИЕМ МОЩНОСТИ | 2015 |
|
RU2605458C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД С ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2262794C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
Изобретение относится к электротехнике и может быть использовано на электроподвижном составе с тяговыми асинхронными двигателями, питающимися от контактной сети постоянного тока, в частности для рельсового транспортного средства. Техническим результатом является обеспечение максимально возможной мощности асинхронного двигателя при штатных изменениях напряжения в тяговой электрической сети, а также поддержание заданной величины тока двигателя без колебаний. В регулирующее устройство для привода с асинхронным двигателем введено устройство ограничения задающей величины э.д.с. двигателя с узлом сравнения выходного сигнала регулятора тока с заданным максимально возможным значением, соединенные с элементами регулирующего устройства в соответствии с формулой изобретения. 3 ил.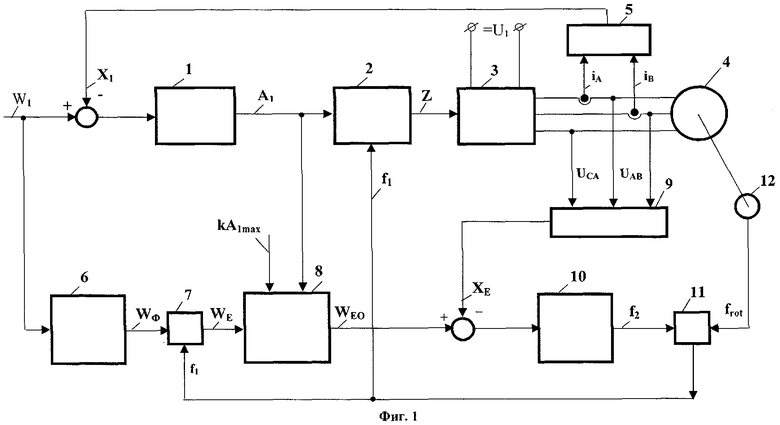
Регулирующее устройство для привода с асинхронным двигателем, содержащее взаимодействующие контуры регулирования амплитуды тока статора двигателя и регулирования его частоты, при этом контур регулирования амплитуды тока статора двигателя включает узел сравнения задающей величины тока с его регулируемой величиной, соединенный с регулятором тока статора двигателя, выходной сигнал с которого поступает на силовой преобразователь, содержащий последовательно соединенные широтно-импульсной модулятор и автономный инвертор напряжения, к выходам которого подключены асинхронный двигатель и вычислитель регулируемой величины тока по мгновенным значениям регулируемых токов фаз асинхронного двигателя, а контур регулирования частоты включает функциональный преобразователь, формирующий задающую величину магнитного потока, умножитель, вычисляющий задающую величину э.д.с. в соответствии с величиной задающего магнитного потока и частотой тока статора двигателя, узел сравнения задающей величины с регулируемой величиной э.д.с., сформированной вычислителем сигнала обратной связи по э.д.с. в соответствии с мгновенными значениями линейных напряжений двигателя, регулятор э.д.с. статора двигателя, соединенный с выходом узла сравнения, сумматор частоты скольжения и вращения ротора, соединенный с выходами регулятора э.д.с. статора и датчика частоты вращения ротора асинхронного двигателя, а выход сумматора соединен с другими входами широтно-импульсного модулятора и умножителя, отличающееся тем, что регулирующее устройство дополнительно содержит устройство ограничения задающей величины э.д.с. двигателя, включающее узел сравнения выходного сигнала регулятора тока с заданным максимально возможным значением его величины, соединенный с интегральным регулятором, и узел выбора минимальной величины, входы которого соединены с выходами интегрального регулятора и умножителя соответственно, а выход соединен с входом задающей величины узла сравнения э.д.с., вход функционального преобразователя соединен с задающей величиной тока статора двигателя.
| Железные дороги мира | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| ЭЛЕКТРОПРИВОД ТИРИСТОРНЫЙ АСИНХРОННЫЙ | 1995 |
|
RU2101847C1 |
| RU 2132110 С1, 20.06.1996 | |||
| Нетканый фильтровальный материал | 1990 |
|
SU1778206A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| US 4388577 A, 14.06.1983 | |||
| ИЗВЛЕЧЕНИЕ ЖЕЛАЕМЫХ ДАННЫХ ИЗ ПОТОКА ДАННЫХ | 1998 |
|
RU2193285C2 |
| DE 3744905 А, 10.10.1991 | |||
| JP 200388197 А, 20.03.2003 | |||
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ТЕПЛОТЫ ГОРЕНИЯ (ТЕПЛОТВОРНОЙ СПОСОБНОСТИ) ГАЗОВ | 1926 |
|
SU9158A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ВОЗДУХА ПРИ МАЛЫХ ЧИСЛАХ РЕЙНОЛЬДСА | 0 |
|
SU302612A1 |

