Изобретение относится к самолетам с двумя или более двигателями, преимущественно турбореактивными двигателями с отклоняемым вектором тяги.
Известно управление по крену самолетом с помощью элеронов, элевонов или интерцепторов. установленных справа и слева на консолях крыла самолета (см. Котик М.Г. Динамика взлета и посадки самолетов. - М.: Машиностроение, 1984, стр. 118-119). Известно также управление по крену с помощью ножниц рулей высоты. Однако на малых, а тем более - на нулевой скорости такое управление невозможно.
Цель данного изобретения - управление двухдвигательным самолетом по крену.
Для управления креном в режиме висения применен способ управления самолетом с двумя и более двигателями с отклоняемым вектором тяги, состоящий в том, что для управления по крену векторы тяги двух или более двигателей отклоняются так, что результирующая сила, действующая на центр масс, равна нулю.
Для этого самолет имеет соответствующую систему, которая состоит из задатчика крена, сигнал с которого поступает на сумматоры, на которые также поступает общий сигнал от системы управления вектором тяги, а сигналы с этих сумматоров усиливаются усилителями, со входов которых поступают на исполнительные механизмы сопел.
Система получится гораздо проще, надежней и безошибочней, если в ней будет участвовать только четное число двигателей. В данном случае два.
По достижении достаточно большой скорости система становится не нужна и может отключаться по сигналу датчика скорости, который с помощью реле отключает питание или сигнал датчика.
Данная система особенно целесообразна при совместной работе с системой управления направлением и тангажом трехдвигательного самолета, двигатели которого расположены треугольником. В таком самолете управление направлением и тангажом осуществляется дифференциальной подачей топлива в три двигателя и/или дифференциальным отклонением вектора тяги этих двигателей (отдельное изобретение).
На чертеже показана система управления креном. Как сказано выше, она предусматривает совместную работу с системой управления направлением и тангажом трехдвигательного самолета. Система состоит из задатчика крена ЗКР 3, соединенного с двумя сумматорами 38, 39, на которые также подается управляющий сигнал от системы управления тангажом. Сигналы с сумматоров поступают на усилители левого и правого
двигателей 40, 41 и далее к исполнительным механизмам сопел 12. На нижний двигатель сигнал от системы управления тангажом поступает без дополнительного сигнала через усилитель 42. При этом гироскопические датчики крена являются общими для данной системы и для системы управления направлением и тангажом и находятся в указанной системе. Или же система имеет отдельный горизонтально расположенный гироскоп, который в этом случае должен иметь 4 датчика положения (для сохранения ориентации при вертикальном полете в любой плоскости).
Система работает так: задатчик крена ЗКР 3 выдает два сигнала - «левый» и «правый». Они подают на сумматоры 38, 39 левого и правого двигателей, где смешиваются сигналы тангажа, и далее поступают на сопла. В зависимости от знака сигнала («вверх» или «вниз») сопла отклоняются по-разному и создают кренящий момент.
Изобретение предназначено для модернизации самолетов МИГ-29 и СУ-27 и сделает их самолетами пятого поколения. Ожидаемые характеристики: сверхзвуковая крейсерская скорость, скорость на режиме атмофорсажа - 4 М, потолок - 25000 метров, скороподъемность - сверхзвуковая, допустимая перегрузка - 20 g (с новым противоперегрузочным костюмом по пат. №2452665 и с усиленным лонжероном).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| САМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2490169C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СИСТЕМА СПАСЕНИЯ САМОЛЕТА /ВАРИАНТЫ/ | 2006 |
|
RU2336203C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| АВИАГОРИЗОНТ | 2010 |
|
RU2428657C1 |
| ЭЛЕКТРОДИСТАНЦИОННОЕ УПРАВЛЕНИЕ "УТКА" | 2015 |
|
RU2586741C1 |
Устройство для управления самолетом, состоящее из задатчика крена, сигнал с которого поступает на сумматоры, на которые также поступает общий сигнал от системы управления вектором тяги, а сигналы с этих сумматоров усиливаются усилителями, с входов которых поступают на исполнительные механизмы сопел. Изобретение направлено на управление по крену на малых скоростях. 2 з.п. ф-лы, 1 ил.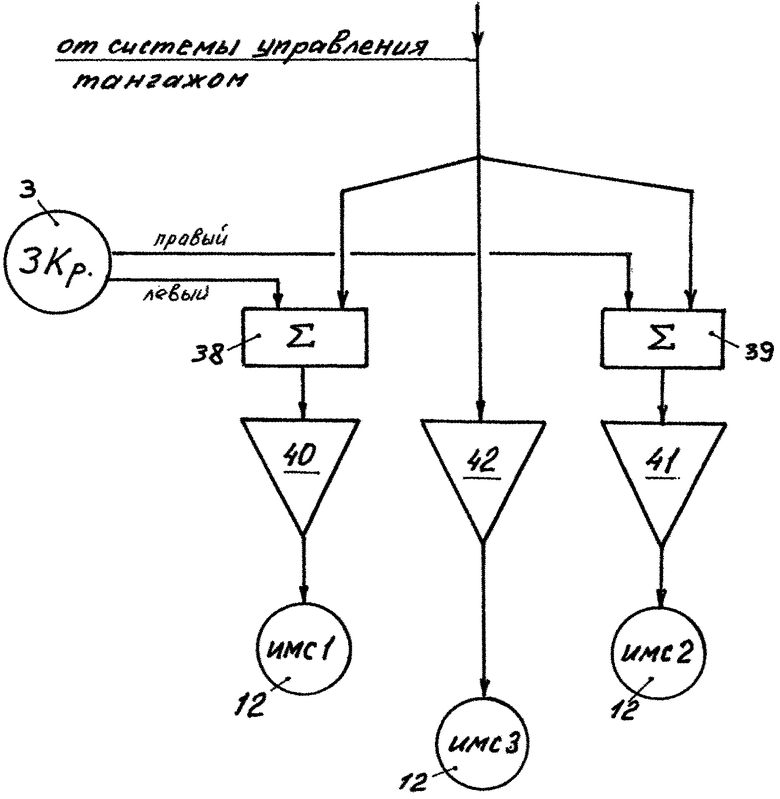
1. Устройство для управления самолетом, состоящее из задатчика крена, сигнал с которого поступает на сумматоры, на которые также поступает общий сигнал от системы управления вектором тяги, а сигналы с этих сумматоров усиливаются усилителями, со входов которых поступают на исполнительные механизмы сопел.
2. Устройство по п.1, в котором при наличии нечетного числа двигателей в управлении креном участвует только четное число двигателей.
3. Устройство по п.1, в котором задатчик крена запитывается через контакты реле или соединен с сумматорами через контакты реле, причем реле включается от датчика скорости по достижении определенной скорости.
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| US 5330131 A1, 19.07.1994 | |||

