Изобретение относится к области машиностроения, а именно к робототехнике и может быть использовано в различных областях техники.
Известен промвзиленный робот, содержаьщй устройство программного управления с датчиками обратной связи и, выполненные из эластичных элементов , руку, кисть и схват, полости которых связаны с приводами, например, гидравлическими i .
Недостатком известного устройства является сложность конструкции и низкая точность.
Цель изобретения - упрощение конструкции и повышение точности.
Цепь достигается тем, что каждый гидравлический привод выполнен в виде основного и дополнительного силовых цилиндров, жестко связанных своими штоками, причем бесштоковая полость дополнительного цилиндра связана с полостью одного эластичного элемента, а в поршне основного силового цилиндра размещена несамотормоэящаяся винтовая пара, гайка которой закреплена на поршне, а винт, закрепленный неподвижно относительно корпуса основного силового цилиндра, связан с датчиком обратной связи. Кроме
того, датчик обратной связи выполнен в виде шагового электродвигателя.
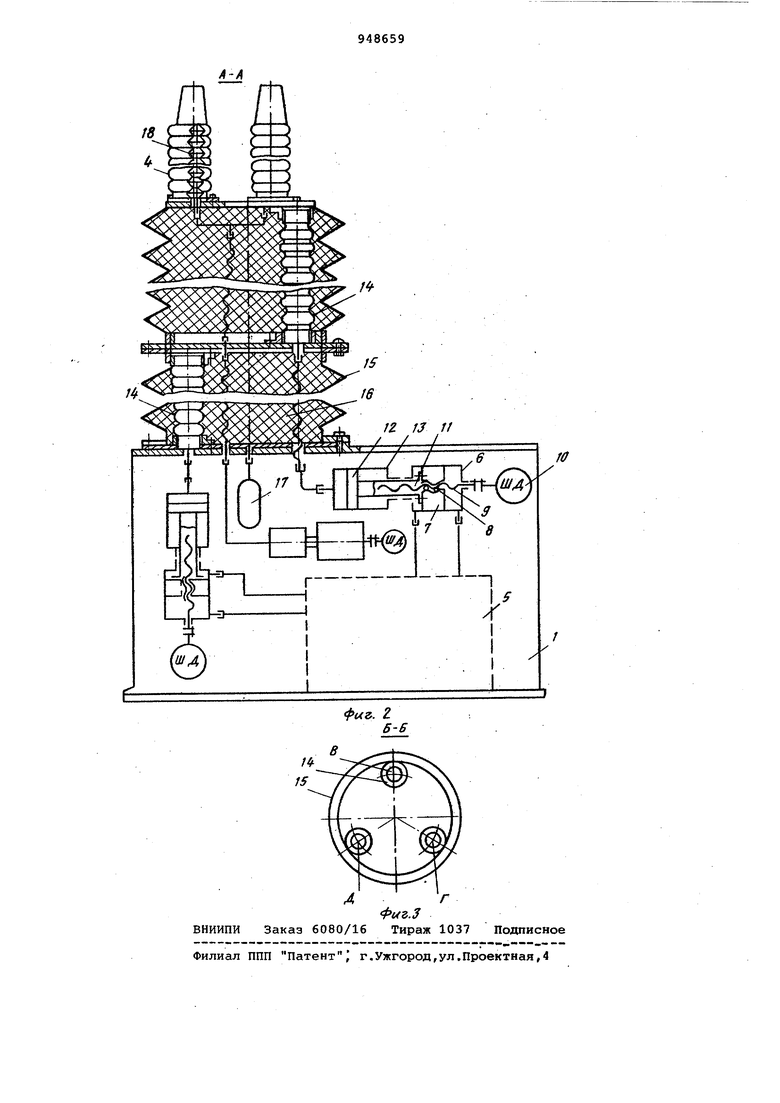
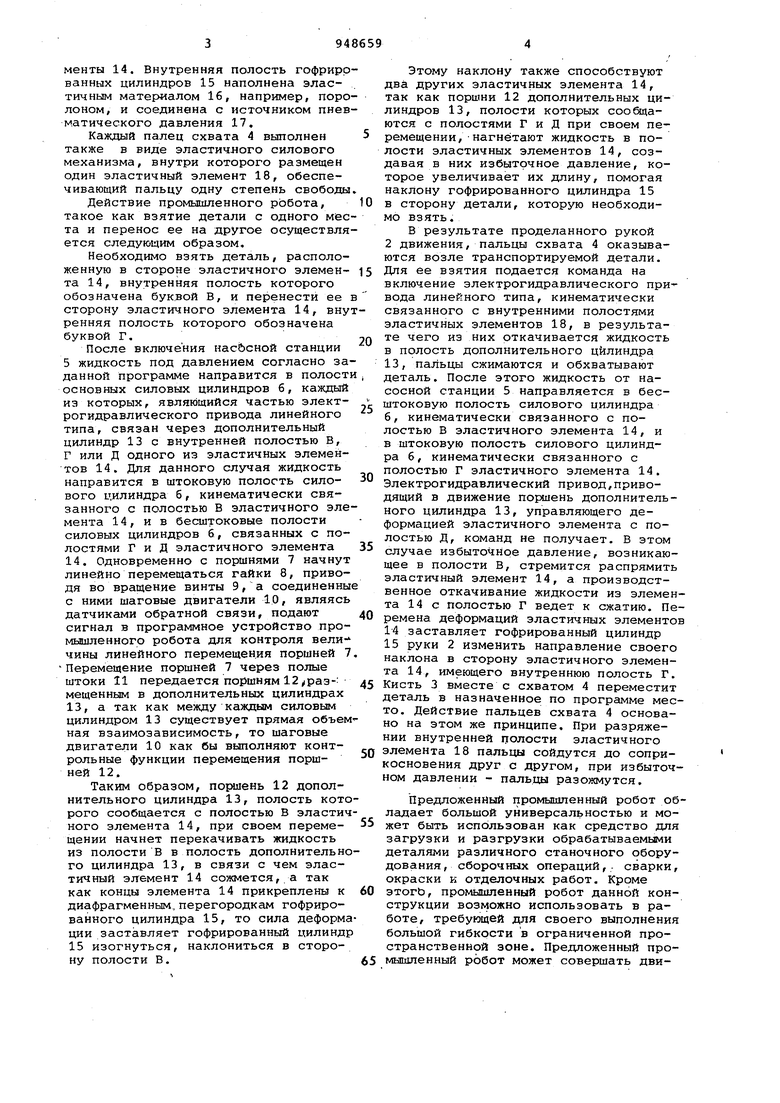
На фиг. показан промышленный робот, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1.
Промышленный робот состоит из основания 1, на котором смонтирована рука 2 с кистью 3 и охватом 4 f выпол10ненным из трех пальцев. Внутри основания 1 размещена насосная станция 5, к которой подсоединены силовиецилиндры б. в поршне 7 силового цилиндра 6 смонтирована шариковая гайка 8,
15 а ходовой винт 9 соединен с шаговым двигателем 10-. Полый шток 11 одним концом соединен с поршнем 7 основного цилиндра, а другим - с поршнем 12 дополнительного цилиндра 13, выполня20ющего функции насоса, одна полость .: которого сообщается с внутренней полостью эластичного элемента 14, выполненной из резинокордного материала, а другая полость связана с ат-
25 мосферой.
Рука 2 и кисть 3 представляют из себя последовательно соединенные между собой зластичнгле силовые механизмы, в каждом гофрированном цилиндре
30 15 которых размещены эластичные элементы 14. Внутренняя полость гофриро ванных цилиндров 15 наполнена эластичным материалом 16, например, поро лоном/ и соединена с источником пнев матического давления 17. Каждый палец схвата 4 выполнен также в виде эластичного силового механизма, внутри которого размещен один эластичный элемент 18, обеспечивающий пальцу одну степень свободы Действие промышленного робота, такое как взятие детали с одного мес та и перенос ее на другое осуществля ется следующим образом. Необходимо взять деталь, расположенную в стороне эластичного элемента 14, внутренняя полость которого обозначена буквой В, и перенести ее сторону эластичного элемента 14, вну ренняя полость которого обозначена буквой Г. После включения насЬсной станции 5 жидкость под давлением согласно за данной программе направится в полост основных силовых цилиндров 6, каждый из которых, являющийся частью электрогидравлического привода линейного типа, связан через дополнительный цилиндр 13 с внутренней полостью В, Г или Д одного из эластичных элементов 14. Для данного случая жидкость направится в штоковую полость силового цилиндра 6, кинематически связанного с полостью В эластичного эле мента 14, и в бесштоковые полости силовых цилиндров б, связанных с полостями Г и Д эластичного элемента 14. Одновременно с поршнями 7 начнут линейно перемещаться гайки 8, приводя во вращение винты 9, а соединенны с ними шаговые двигатели 10, являясь датчиками обратной связи, подают сигнал в программное устройство про мьииленногр робота для контроля вели чины линейного перемещения поршней Перемещение поршней 7 через полые штоки 11 передается поршням 12 раз-: мещенным в дополнительных цилиндрах 13, а так как между каждым силовым цилиндром 13 существует прямая объе ная взаимозависимость, то шаговые двигатели 10 как бы выполняют контрольные функции перемещения поршней 12. Таким образом, поршень 12 дополнительного цилиндра 13, полость кот рого сообщается с полостью В эласти ного элемента 14, при своем перемещении начнет перекачивать жидкость из полости В в полость дополнительн го цилиндра 13, в связи с чем эластичный элемент 14 сожмется, а так как концы элемента 14 прикреплены к диафрагменным,перегородкам гофрированного цилиндра 15, то сила деформ ции заставляет гофрированный цилинд 15 изогнуться, наклониться в сторону полости В. Этому наклону также способствуют два других эластичных элемента 14, так как поршни 12 дополнительных цилиндров 13, полости которых соойцаются с полостями г и Д при своем перемещении, нагнетают жидкость в полости эластичных элементов 14, создавая в них избыточное давление, которое увеличивает их длину, помогая наклону гофрированного цилиндра 15 в сторону детали, которую необходимо взять. В результате проделанного рукой 2 движения, пальцы схвата 4 оказываются возле транспортируемой детали. Для ее взятия подается команда на включение электрогидравлического привода линейного типа, кинематически связанного с внутренними полостями эластичных элементов 18, в результате чего из них откачивается жидкость в полость дополнительного цилиндра 13, пальцы сжимаются и обхватывают деталь. После этого жидкость от насосной станции 5 направляется в бесштоковую полость силового цилиндра 6, кинематически связанного с полостью В эластичного элемента 14, и в штоковую полость силового цилиндра 6, кинематически связанного с полостью Г эластичного элемента 14. Электрогидравлический привод,приводящий в движение поршень дополнительного цилиндра 13, управляющего деформацией эластичного элемента с полостью Д, команд не получает. В этом случае избыточное давление, возникающее в полости В, стремится распрямить эластичный элемент 14, а производственное откачивание жидкости из элемента 14 с полостью Г ведет к сжатию. Перемена деформаций эластичных элементов 14заставляет гофрированный цилиндр 15руки 2 изменить направление своего наклона в сторону эластичного элемента 14, имеющего внутреннюю полость Г. Кисть 3 вместе с схватом 4 переместит деталь в назначенное по программе место. Действие пальцев схвата 4 основано на этом же принципе. При разряжении внутренней полости эластичного элемента 18 пальцы сойдутся до соприкосновения друг с другом, при избыточном давлении - пальцы разожмутся. Предложенный промышленный робот обладает большой универсальностью и может быть использован как средство для загрузки и разгрузки обрабатываемыми деталями различного станочного оборудования, сборочных операций,- сварки, окраски к отделочных работ. Кроме этогЬ, промышленный робот данной конструкции возможно использовать в работе, требующей для своего выполнения большой гибкости в ограниченной пространственной зоне. Предложенный промышленный робот может совершать движения в прямоугольной, цилиндрической. и сферической системах координат.
Формула изобретения
1. Промышленный робот, содержащий устройство программного управления с датчиками обратной связи и выполненные из эластичных элементов руку, кисть и схват, полости которых связаны сприводами, например, гидравлическими, отличающийся тем, что, с целью упрощения конструкции и повышения точности, каждый гидравлический привод выполнен в виде основного и дополнительного силовых цилиндров, жестко связанных своими штоками, причем бесштоковая полость дополнительного цилиндра связана с полостью одного эластичного элемента, а в поршне основного силового цилиндра размещена дополнительно введенная несамотормозящаяся винтовая пара, гайка которой закреплена на поршне, а винт - на корпусе основного силового цилиндра, причем винт связан с датч-иком обратной связи. .
2. Робот non.lj отличающийся тем., что датчик обратной связи выполнен в виде шагового электродвигателя .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство-СССР № 688329, кл. В 25 J 9/00, 1978.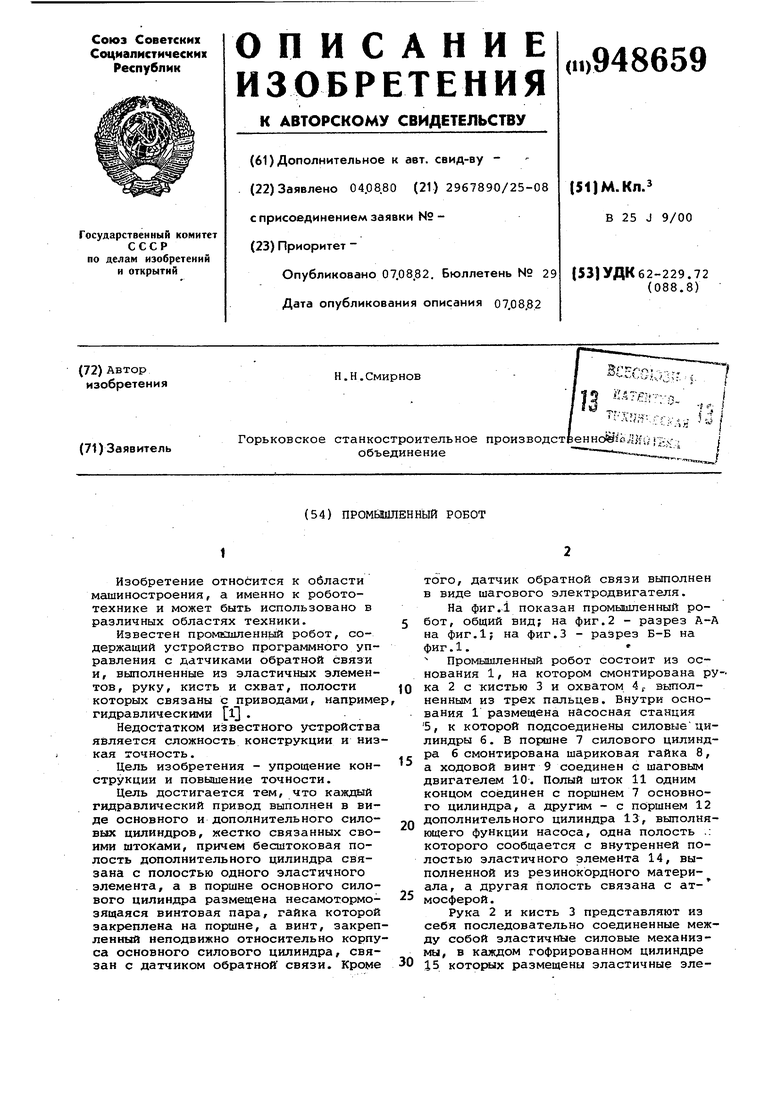
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1983 |
|
SU1174255A1 |
| Промышленный робот | 1979 |
|
SU821126A1 |
| Схват | 1979 |
|
SU837922A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU785560A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
| Рука манипулятора | 1984 |
|
SU1247265A1 |