Область техники, к которой относится изобретение
Настоящее изобретение относится к области определения целостности навигационной системы носителя.
Уровень техники
Под целостностью понимают меру достоверности навигационных параметров (положения, скорости, высоты) носителя, оцениваемых его навигационной системой, выраженную в виде вероятности того, что отклонение оцененного значения от реального значения навигационного параметра превосходит некоторый предел (границу) защиты.
Настоящее изобретение касается способа и системы определения одного или нескольких пределов защиты, связанных с одним или несколькими навигационными параметрами носителя, а более конкретно направлено на выработку непротиворечивых во времени пределов защиты для навигационных параметров.
В соответствии с известными способами положение носителя, например воздушного судна, определяют, с одной стороны, по данным, получаемым от бортовой измерительной аппаратуры (в состав которой могут входить, например, инерциальный блок управления или барометрический высотомер), и, с другой стороны, по данным, получаемым из сигналов системы GNSS (Global Navigation Satellite System - Глобальная система спутниковой навигации), поступающих от группировки спутников, находящихся на околоземной орбите. Комбинированная обработка таких данных, например, при помощи фильтра Калмана позволяет определить параметры состояния воздушного судна, а именно точные параметры его положения, скорости и высоты, близкие к реальным параметрам состояния такого воздушного судна.
В промежутках между приемом спутниковых сигналов навигационные параметры воздушного судна экстраполируют или оценивают на основе инерциальных данных, применяемых к последним вычисленным параметрам состояния. Определенные таким образом параметры состояния периодически сбрасывают при каждом приеме спутниковых сигналов. Тем не менее, на точность вычисленных навигационных параметров оказывают значительное влияние неисправности в группировке спутников, т.е. случаи возникновения на каком-либо из спутников неисправности, которая может повлиять на точность передаваемых им данных и не будет выявлена, а также случаи одновременного или последовательного возникновения неисправностей на двух спутниках группировки (вероятность одновременного возникновения неисправности на трех спутниках столь мала, что ей обычно пренебрегают).
Поэтому пилот воздушного судна обычно получает так называемые пределы (границы) или объем защиты, центр которого совпадает с расчетным положением, а размеры соответствуют точности определения такого положения с учетом вероятности возникновения неисправностей на одном или двух спутниках. Совокупный объем защиты представляет собой цилиндр с вертикальной осью, определяемый радиусом и половинной высотой, которые обычно называют, соответственно, HPL (Horizontal Protection Limit, горизонтальный предел защиты) и VPL (Vertical Protection Limit, вертикальный предел защиты). В случае отсутствия точного совпадения реального положения воздушного судна с его расчетным положением вероятность его нахождения вне совокупного объема защиты не превышает приемлемого порога безопасности (или риска целостности). Такое представление предела защиты без труда может быть использовано и для других навигационных параметров (скорости и высоты).
Таким образом, целостность определяет достоверность оценок навигационных параметров (положения, скорости и высоты). Для заданного навигационного параметра воздушного судна, если реальное значение какого-либо навигационного параметра не совпадает точно со значением, оцененным навигационной системой, вероятность его нахождения вне соответствующего предела защиты (который представляет собой положительную величину, сходную с рассматриваемым параметром) не превышает риска целостности (обычно порядка 10-7 на час полета).
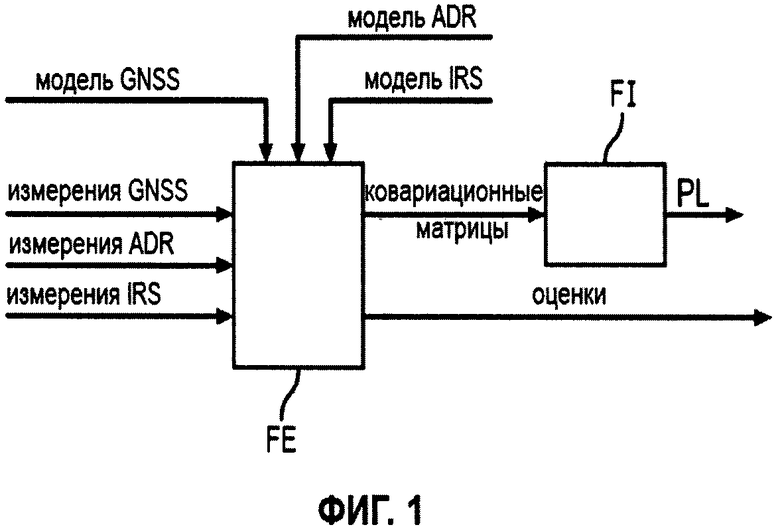
В соответствии с хорошо известными специалистам в данной области способами, основанными на комбинировании статистических моделей, расчеты целостности обычно производят при помощи высокоуровневой архитектуры, представленной на фиг.1.
На фиг.1 представлена функция FE оценки (обычно осуществляемая при помощи фильтра Калмана), которая позволяет, используя спутниковые измерения GNSS, измерения ADR (Air Data Reference - базовые воздушные данные), получаемые, например, от барометрического высотомера, и измерения IRS (Inertial Reference System - базовой инерциальной системы), получаемые от инерциального блока управления, и модели ошибок, соответствующие указанным измерениям, формировать оценки навигационных параметров (положения, скорости, высоты), а также модель для оценки ошибок (как правило, с использованием ковариационной матрицы). На фиг.1 также представлена функция FI целостности, позволяющая рассчитывать пределы PL защиты, которые ограничивают ошибки оценки. Известны несколько способов расчета пределов защиты, которые можно найти, например, в патентном документе US 5760737.
Однако обработка необходимой информации и вычисление пределов защиты занимают сравнительно продолжительное время, в результате чего пользователь получает результаты расчетов объема защиты с некоторой задержкой. Кроме того, в связи с большим количеством вычислений расчет объема защиты и его обновление могут быть произведены с более низкой частотой, чем частота расчета соответствующих навигационных параметров. Это приводит к задержке между моментом, в который текущий объем защиты будет соответствовать действительности, и моментом использования данного объема защиты пользователем. В результате, объем защиты, предоставляемый пользователю, не соответствует действительности в связи с такой задержкой, которую желательно минимизировать, но невозможно полностью устранить.
Таким образом, несмотря на то что с практической точки зрения оценки навигационных параметров и соответствующие пределы защиты должны соответствовать действительности в один и тот же момент времени, на соответствие действительности пределов защиты влияют ограничения, связанные с работой в режиме реального времени (причем пределы защиты могут быть предоставлены с задержкой вплоть до длительности одного цикла вычислений функции оценки). На соответствие действительности пределов защиты также может влиять асинхронность, существующая между разными (как правило, тремя) навигационными системами, установленными в носителе.
Для решения проблемы ограничений, влияющих на соответствие действительности во времени, которые связаны с асинхронностью навигационных систем, планируется применение экстраполяции пределов защиты с тем, чтобы вычислять пределы ошибок оценки, согласованных во времени с навигационными параметрами, для которых вычисляют пределы защиты.
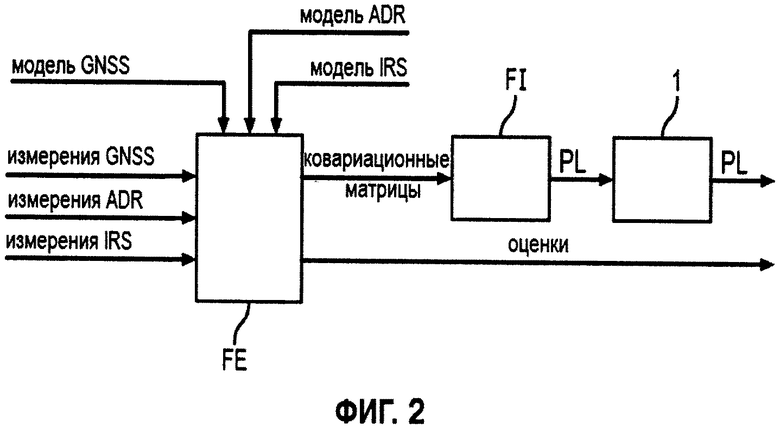
С этой целью в патентном документе ЕР 2006707 было предложено производить экстраполяцию на выходе функции целостности для компенсации задержек вычислений и, таким образом, решения проблемы ограничений соответствия действительности в реальном времени. На фиг.2 представлена схема решения, предложенного в данном документе. На схеме фиг.2 блок 1 иллюстрирует компенсацию задержек, осуществленную в соответствии с решением по данному документу на основе пределов PL(t) защиты, определенных функцией FI целостности и соответствующих действительности (валидных) в момент t, для выработки («экстраполяции») предела PL(t+dt) защиты, соответствующего действительности в будущем в момент t+dt.
Однако данное решение не вполне удовлетворительно, поскольку оно требует распределения риска целостности между теми навигационными параметрами, с которыми связана ненулевая в процентном соотношении часть риска: рекомендованное распределение соответствует 80% риска для пределов защиты положения и 10% риска для пределов защиты скорости. Кроме этого, данное решение основано на чисто комбинаторной логике, не учитывающей известные модели ошибок.
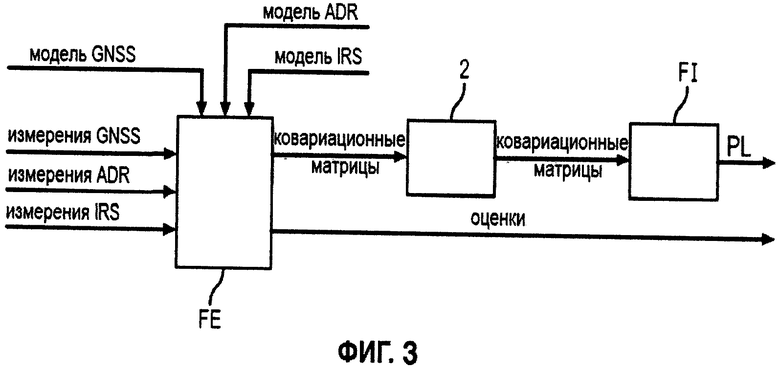
Решение, учитывающее модели ошибок, представлено на фиг.3, на которой блок 2 осуществляет экстраполяцию ковариационных матриц, полученных от функции FE оценки, при помощи уравнения Риккати. Данный блок, действующий аналогично фазе предсказания алгоритма фильтра Калмана, по существу, моментально определяет формулу для экстраполяции ковариационной матрицы. Например, может быть использована текущая переходная матрица, вычисленная на основе предшествующей динамики носителя. Затем функция FI целостности использует ковариационную матрицу, экстраполированную на некоторый момент в будущем, для расчета пределов защиты. Пример такого решения представлен в патентном документе ЕР 2081043. Как описано в абзацах [0027]-[0030], ковариационную матрицу Pk в момент k экстраполируют на будущий момент k+1 по формуле: 
Однако данное второе решение обладает следующими ограничениями. Во-первых, экстраполяция не является полной, поскольку ее осуществление в режиме реального времени требует использования переходной матрицы, вычисляемой по предшествующей динамике носителя. Кроме этого, соответствующее количество вычислений может ограничивать работоспособность, в частности, в случае мультинавигационной системы, использующей банк фильтров оценки (в котором каждый из фильтров исключает одно из спутниковых измерений).
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, состоит в компенсации ограничений соответствия действительности во времени пределов защиты при помощи полной экстраполяции пределов защиты, что позволяет устранить вышеописанные недостатки известных решений.
Для решения поставленной задачи в соответствии с первым аспектом изобретения предлагается способ для определения для будущего момента времени пределов защиты, связанных с навигационными параметрами носителя, включающий этапы, на которых:
- оценивают навигационные параметры носителя в настоящий момент времени,
- формируют статистическую модель ошибок оценки навигационных параметров носителя в настоящий момент времени в виде ковариационной матрицы,
- экстраполируют статистическую модель ошибок оценки на будущий момент времени,
- вычисляют пределы защиты для будущего момента времени на основе экстраполированной статистической модели,
отличающийся тем, что для экстраполяции статистической модели ошибок оценки используют применение постоянной положительной матрицы перехода к вектору среднеквадратичных отклонений, сформированному из квадратных корней диагональных элементов ковариационной матрицы с целью распространения на будущий момент времени среднеквадратичных отклонений навигационных параметров, полученных в настоящий момент времени.
Некоторые из предпочтительных, но не накладывающих каких-либо ограничений, аспектов данного способа состоят в том, что:
- коэффициенты матрицы перехода определяют на основе гипотез о динамике носителя, рассматриваемых на протяжении временного горизонта;
- гипотезы о динамике носителя содержат гипотезы о, по меньшей мере, одном из следующих элементов: путевая скорость, вертикальная скорость, угловая скорость поворота, горизонтальная перегрузка и вертикальная перегрузка;
- формируют матрицу перехода, предназначенную для компенсации задержки соответствия действительности пределов защиты относительно оценок навигационных параметров:
- коэффициенты матрицы перехода определяют в зависимости от максимальной динамики носителя на протяжении временного горизонта, соответствующего длительности цикла расчетов оценок навигационных параметров;
- формируют матрицу перехода, предназначенную для компенсации задержки соответствия действительности пределов защиты, связанной с асинхронностью различных навигационных систем, установленных на носителе;
- коэффициенты матрицы перехода определяют в зависимости от максимальной динамики носителя на протяжении временного горизонта, соответствующего максимальной длительности периода передачи пределов защиты;
- экстраполяцию для компенсации задержки соответствия действительности, связанной с асинхронностью различных навигационных систем, осуществляют на основе среднеквадратичных отклонений, заранее распространенных на будущий момент времени для компенсации задержки соответствия действительности предела защиты относительно оценок навигационных параметров;
- формируют матрицу перехода, обеспечивающую возможность расчета прогнозных пределов защиты в результате выполнения носителем конкретной операции;
- коэффициенты матрицы перехода определяют в зависимости от конкретной динамики носителя во время выполнения операции на протяжении временного горизонта, соответствующего длительности выполнения операции.
В соответствии со вторым аспектом изобретения предлагается навигационная система носителя, содержащая:
- модуль оценки, формирующий оценки навигационных параметров носителя в настоящий момент времени и статистическую модель ошибок оценки навигационных параметров носителя в настоящий момент времени в виде ковариационной матрицы,
- модуль расчета пределов защиты, формирующий пределы защиты на основе оценок навигационных параметров и статистической модели ошибок оценки,
отличающаяся тем, что содержит модуль экстраполяции статистической модели ошибок оценки, выполненный с возможностью применения постоянной положительной матрицы перехода к вектору среднеквадратичных отклонений, сформированному из квадратных корней диагональных элементов ковариационной матрицы с целью распространения на будущий момент времени среднеквадратичных отклонений навигационных параметров, полученных в настоящий момент времени, причем модуль расчета пределов защиты вычисляет пределы защиты для будущего момента времени на основе экстраполированной статистической модели.
Краткое описание чертежей
Другие аспекты, задачи и преимущества настоящего изобретения станут ясны из нижеследующего подробного описания предпочтительных вариантов его осуществления, приведенного в качестве примера, не накладывающего каких-либо ограничений, со ссылками на прилагаемые чертежи. На чертежах, помимо фиг.1-3, уже описанных выше, на фиг.4 и 5 представлены схемы, иллюстрирующие различные возможные варианты осуществления способа по первому аспекту изобретения.
Осуществление изобретения
В соответствии с первым аспектом изобретения предлагается способ определения для будущего момента времени пределов защиты вокруг положения носителя. Следует понимать, что изобретение также охватывает навигационную систему носителя, выполненную с возможностью осуществления способа по первому аспекту изобретения. Кроме того, хотя в настоящем описании рассмотрен пример положения носителя, следует понимать, что изобретение также охватывает и другие навигационные параметры носителя (скорость, высоту), в связи с чем следует помнить, что пределы защиты принято определять для каждого из навигационных параметров носителя.
Как показано на фиг.4 и 5, в соответствии с изобретением функция FE оценки (осуществляемая модулем оценки, как правило, представляющим собой фильтр Калмана) оценивает навигационные параметры носителя (положение, скорость, высоту) на текущий момент времени и вырабатывает статистическую модель ошибок оценки навигационных параметров носителя на текущий момент времени в виде ковариационной матрицы. Как уже было указано выше, функция FE оценки использует для этого различные измерения (GNSS, ADR и IRS), а также модели ошибок таких измерений.
В соответствии с изобретением предлагается экстраполировать статистическую модель ошибок оценки на некоторый будущий момент времени при помощи модуля 3-6 экстраполяции, а также вычислять пределы защиты для такого будущего момента времени на основе экстраполированной статистической модели при помощи модуля расчета пределов защиты с использованием функции FI целостности, описанной выше.
Перед экстраполяцией статистической модели ошибок оценки на некоторый будущий момент времени в соответствии с изобретением предлагается применять постоянную положительную матрицу перехода (так называемую «консервативную» матрицу) к вектору среднеквадратичных отклонений, сформированному из квадратных корней диагональных элементов ковариационной матрицы, с целью распространения на будущий момент времени среднеквадратичных отклонений навигационных параметров, полученных в настоящий момент времени.
Следует помнить, что диагональные элементы ковариационной матрицы представляют собой дисперсии каждого из навигационных параметров, т.е. квадраты среднеквадратичных отклонений каждого из навигационных параметров.
Настоящее изобретение позволяет компенсировать различные ограничения, влияющие на соответствие действительности во времени постольку, поскольку матрица перехода может быть сформирована в зависимости от рассматриваемого временного горизонта и динамики носителя на таком горизонте.
В соответствии с одним из возможных вариантов осуществления изобретения коэффициенты матрицы перехода определяют в зависимости от гипотез динамики носителя на протяжении временного горизонта.
Матрица перехода основана на матрице перехода фильтра Калмана, но ее коэффициенты положительны и максимальны (относительно набора гипотез динамики носителя). Значения коэффициентов могут, в частности, зависеть от гипотетических значений следующих динамических параметров:
- Путевой скорости (возможно, максимальной), вертикальной скорости (возможно, максимальной);
- Угловой скорости поворота (возможно, максимальной);
- Горизонтальной и вертикальной перегрузки (возможно, максимальных);
- Рассматриваемого периода экстраполяции.
Следует отметить, что применение экстраполяции на входе функции FI целостности в соответствии с изобретением, в отличие от решения по фиг.1, которое предлагает экстраполяцию на выходе функции целостности, не предполагает конкретного распределения вероятности нарушения целостности по навигационным параметрам. Это позволяет (в отличие от фиксированной экстраполяции) сократить размеры пределов защиты и, следовательно, расширить возможности действий при заданных пределах предупреждения.
Кроме того, использование постоянной положительной («консервативной») матрицы перехода в соответствии с изобретением позволяет получить экстраполяцию, полную в рамках заранее определенного набора гипотез о динамике носителя (например, его максимальной динамике). В частности, в отличие от решения по фиг.2, пример которого приведен в патентном документе ЕР 2081043, в экстраполяции по изобретению не используются данные по динамике носителя из предыдущего цикла вычислений, что делает ее независимой от прошлой динамики носителя.
Наконец, использование только векторов среднеквадратичных отклонений, сформированных из квадратных корней диагональных элементов ковариационной матрицы, обеспечивает оптимизацию алгоритмической сложности (по сравнению, в частности, с двойным матричным произведением, используемым в экстраполяции с применением уравнения Риккати).
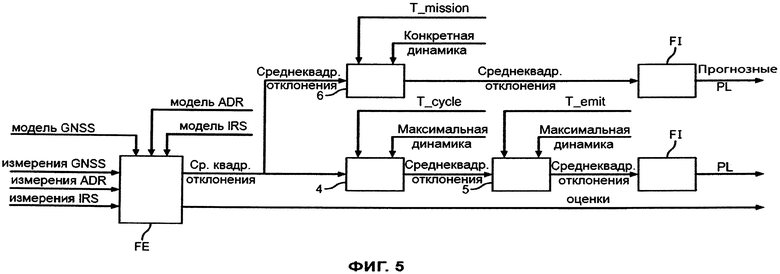
Фиг.5 иллюстрирует один из возможных вариантов осуществления изобретения, в котором полную экстраполяцию среднеквадратичных отклонений для расчета пределов защиты осуществляют несколько раз с целью компенсации различных ограничений соответствия действительности во времени. Однако следует понимать, что каждая из нижеописанных экстраполяций может быть использована независимо или в сочетании с другими типами экстраполяций.
Первую экстраполяцию осуществляет модуль 4 экстраполяции при помощи матрицы перехода, сформированной так, чтобы скомпенсировать задержку соответствия действительности пределов защиты относительно оценок навигационных параметров.
Такая задержка, вызванная использованием в режиме реального времени алгоритма фильтра Калмана, обычно вносит задержку соответствия действительности ковариационной матрицы и, следовательно, действительности пределов защиты, сформированных на основе данной ковариационной матрицы, продолжительностью в один цикл фильтра Калмана.
Коэффициенты матрицы перехода можно определить более точно в зависимости от максимальной динамики носителя на протяжении временного горизонта T_cycle, соответствующего длительности цикла вычислений оценок навигационных параметров. Таким образом, среднеквадратичные отклонения в момент t экстраполируют (приводят к будущему времени) на будущий момент t+T_cycle, в предположении, что в рассматриваемом временном промежутке носитель должен иметь динамику, ограниченную его максимальной динамикой.
Вторую экстраполяцию осуществляет модуль 5 экстраполяции при помощи матрицы перехода, сформированной так, чтобы скомпенсировать задержку соответствия действительности пределов защиты, связанную с асинхронностью между разными навигационными системами, установленными на борту носителя. В примере, представленном на фиг.5, такую вторую экстраполяцию осуществляют на основе среднеквадратичных отклонений, экстраполированных модулем 5 экстраполяции с компенсацией задержек, порожденных вычислениями в режиме реального времени. Однако следует понимать, что компенсация асинхронности навигационных систем может быть осуществлена независимо от компенсации задержек вычислений в режиме реального времени на основе среднеквадратичных отклонений, получаемых непосредственно с выхода функции FE оценки.
Вычисление пределов защиты, общих для разных асинхронных навигационных систем, порождает задержку соответствия действительности, максимальная длительность которой равна периоду передачи пределов защиты. Поэтому коэффициенты матрицы перехода определяют в зависимости от максимальной динамики носителя на протяжении временного горизонта T_emit, соответствующего периоду передачи пределов защиты. Таким образом, среднеквадратичные отклонения в момент t экстраполируют (приводят к будущему времени) на будущий момент (t+T_emit), в предположении, что в рассматриваемом временном промежутке носитель должен иметь динамику, ограниченную его максимальной динамикой.
Третью экстраполяцию осуществляет модуль 6 экстраполяции при помощи матрицы перехода, сформированной так, чтобы обеспечить возможность расчета прогнозных пределов защиты в результате выполнения носителем конкретных операций.
Практика современной авиации требует вычисления прогнозных пределов защиты для конкретных операций (например, разворота). Таким образом, коэффициенты матрицы перехода определяют в зависимости от конкретной динамики носителя во время выполнения операции (причем такую динамику, например, максимальную угловую скорость крена во время разворота, обычно определяет производитель воздушного судна) на протяжении временного горизонта T_mission, соответствующего длительности выполнения операции (например, осуществления разворота). Таким образом, среднеквадратичные отклонения в момент t экстраполируют (приводят к будущему времени) на будущий момент (t+T_mission), в предположении, что в рассматриваемом временном промежутке носитель должен иметь динамику, ограниченную указанной конкретной динамикой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| СПОСОБ КОРРЕКЦИИ ОШИБОК ПРЕДСКАЗАНИЯ ЗНАЧЕНИЙ ИЗМЕНЯЮЩИХСЯ ВО ВРЕМЕНИ СИГНАЛОВ, ВОЗМУЩАЕМЫХ РАЗЛИЧНЫМИ НЕКОНТРОЛИРУЕМЫМИ СИСТЕМАТИЧЕСКИМИ ЯВЛЕНИЯМИ | 2009 |
|
RU2508560C2 |
| ОЦЕНКА ОШИБОК И ЦЕЛОСТНОСТИ ПОСРЕДСТВОМ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕЩЕНИЯ | 2020 |
|
RU2789700C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| Способ определения координат группы летательных аппаратов при межсамолетной навигации | 2020 |
|
RU2738039C1 |
| СПОСОБ КООРДИНАТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2015 |
|
RU2591044C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
Изобретение относится к вычислительной технике. Технический результат заключается в упрощении определения пределов защиты при помощи полной экстраполяции пределов защиты. Способ для определения для будущего момента времени пределов защиты, связанных с навигационными параметрами носителя, в котором оценивают навигационные параметры носителя в настоящий момент времени, формируют статистическую модель ошибок оценки навигационных параметров носителя в настоящий момент времени в виде ковариационной матрицы, экстраполируют статистическую модель ошибок оценки на будущий момент времени, вычисляют предел защиты для будущего момента времени на основе экстраполированной статистической модели, причем для экстраполяции статистической модели ошибок оценки используют применение постоянной положительной матрицы перехода к вектору среднеквадратичных отклонений, сформированному из квадратных корней диагональных элементов ковариационной матрицы с целью распространения на будущий момент времени среднеквадратичных отклонений навигационных параметров, полученных в настоящий момент времени, при этом указанное распространение является независимым от предыдущей динамики носителя. 2 н. и 9 з.п. ф-лы, 5 ил.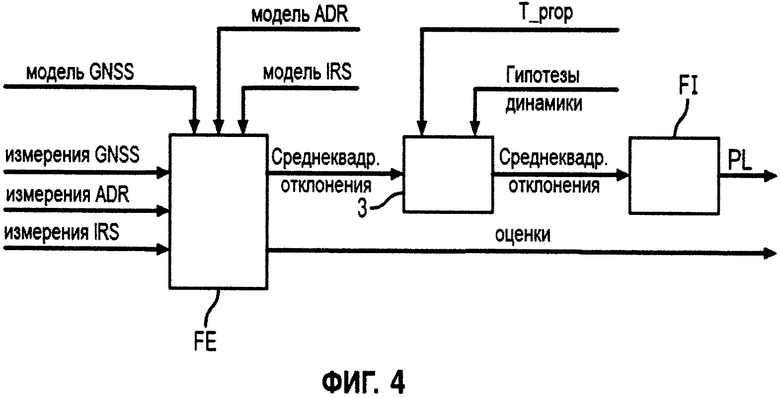
1. Способ для определения для будущего момента времени пределов защиты, связанных с навигационными параметрами носителя, включающий этапы, на которых:
оценивают навигационные параметры носителя в настоящий момент времени,
формируют статистическую модель ошибок оценки навигационных параметров носителя в настоящий момент времени в виде ковариационной матрицы,
экстраполируют статистическую модель ошибок оценки на будущий момент времени,
вычисляют предел защиты для будущего момента времени на основе экстраполированной статистической модели,
отличающийся тем, что для экстраполяции статистической модели ошибок оценки используют применение постоянной положительной матрицы перехода к вектору среднеквадратичных отклонений, сформированному из квадратных корней диагональных элементов ковариационной матрицы с целью распространения на будущий момент времени среднеквадратичных отклонений навигационных параметров, полученных в настоящий момент времени, при этом указанное распространение является независимым от предыдущей динамики носителя.
2. Способ по п.1, отличающийся тем, что коэффициенты матрицы перехода определяют на основе гипотез о динамике носителя, рассматриваемых на протяжении временного горизонта.
3. Способ по п.2, отличающийся тем, что гипотезы о динамике носителя содержат гипотезы о, по меньшей мере, одном из следующих элементов: путевая скорость, вертикальная скорость, угловая скорость поворота, горизонтальная перегрузка и вертикальная перегрузка.
4. Способ по любому из пп.1-3, отличающийся тем, что включает формирование матрицы перехода, предназначенной для компенсации задержки соответствия действительности пределов защиты относительно оценок навигационных параметров.
5. Способ по п.4, отличающийся тем, что коэффициенты матрицы перехода определяют в зависимости от максимальной динамики носителя на протяжении временного горизонта, соответствующего длительности цикла расчетов оценок навигационных параметров.
6. Способ по любому из пп.1-3, отличающийся тем, что включает формирование матрицы перехода, предназначенной для компенсации задержки соответствия действительности пределов защиты, связанной с асинхронностью различных навигационных систем, установленных на носителе.
7. Способ по п.6, отличающийся тем, что коэффициенты матрицы перехода определяют в зависимости от максимальной динамики носителя на протяжении временного горизонта, соответствующего максимальной длительности периода передачи пределов защиты.
8. Способ по п.6, отличающийся тем, что экстраполяцию для компенсации задержки соответствия действительности, связанной с асинхронностью различных навигационных систем, осуществляют на основе среднеквадратичных отклонений, заранее распространенных на будущий момент времени, для компенсации задержки соответствия действительности предела защиты относительно оценок навигационных параметров.
9. Способ по любому из пп.1-3, отличающийся тем, что включает формирование матрицы перехода, предназначенной для обеспечения возможности расчета прогнозных пределов защиты в результате выполнения носителем конкретной операции.
10. Способ по п.9, отличающийся тем, что коэффициенты матрицы перехода определяют в зависимости от конкретной динамики носителя во время выполнения операции на протяжении временного горизонта, соответствующего длительности выполнения операции.
11. Навигационная система носителя, содержащая:
модуль (FE) оценки, формирующий оценки навигационных параметров носителя в настоящий момент времени и статистическую модель ошибок оценки навигационных параметров носителя в настоящий момент времени в виде ковариационной матрицы,
модуль (FI) расчета пределов защиты, формирующий пределы защиты на основе оценок навигационных параметров и статистической модели ошибок оценки,
отличающаяся тем, что содержит модуль (3-6) экстраполяции статистической модели ошибок оценки, выполненный с возможностью применения постоянной положительной матрицы перехода к вектору среднеквадратичных отклонений, сформированному из квадратных корней диагональных элементов ковариационной матрицы с целью распространения на будущий момент времени среднеквадратичных отклонений навигационных параметров, полученных в настоящий момент времени, причем модуль расчета пределов защиты вычисляет пределы защиты для будущего момента времени на основе экстраполированной статистической модели, а указанное распространение является независимым от предыдущей динамики носителя.
| ВИНТОВОЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ЗЕРНА | 1995 |
|
RU2081043C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ ФОРМИРОВАНИЯ СЕРНОВИТНОЙ ПЛЕНКИ НА ТРУЩИХСЯ ПОВЕРХНОСТЯХ | 1992 |
|
RU2006707C1 |
| US 7219013 B1, 15.05.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265855C1 |

