ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу управления гранулятором, содержащим множество валков, установленных внутри цилиндрической матрицы для вдавливания гранулируемого материала через перфорации, предусмотренные в указанной цилиндрической матрице. Гранулятор дополнительно содержит один или более регулировочных механизмов для регулирования расстояния между валками и матрицей и приводной механизм для приведения во вращение матрицы и валков. Обычно, валки приводятся в движение трением между матрицей, гранулируемым материалом и валками, и таким образом приводной механизм приводит в движение только матрицу.
УРОВЕНЬ ТЕХНИКИ
Для того чтобы максимизировать производительность такого гранулятора, обычно его приводят близко к максимальной нагрузке, и таким образом слабые колебания могут приводить к перегрузке гранулятора. Обычно, такая перегрузка не определяется, пока защитный механизм, например, в виде срезного пальца, не будет поврежден, что приведет к расцеплению опоры валков, в результате чего валки и опора валков могут вращаться с матрицей при возникновении блокирования гранулятора. В дальнейшем, необходимо будет разбирать гранулятор для того, чтобы освободить пространство между валками и матрицей и вставить новый срезной палец для защитного механизма до перезапуска гранулятора.
Из EP 472 016 A2 известно выполнение измерения вращательной скорости матрицы и валков и сравнение их периферийной скорости для того, чтобы определять возможное проскальзывание, которое считается указанием на неисправную работу гранулятора. Далее могут быть приняты пригодные контрмеры, например, в виде уменьшенной подачи материала или изменения состава материала, подаваемого для того, чтобы возобновить точное функционирование гранулятора.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение улучшенного способа управления гранулятором описанного вида, благодаря которому может быть обеспечено своевременное предупреждение о перегрузке гранулятора и введение пригодных соответствующих контрмер для исключения полной остановки гранулятора в таких ситуациях.
Согласно настоящему изобретению, указанная и дополнительные задачи решаются посредством способа управления, содержащего этапы, на которых управляют положением валков посредством регулировочного механизма в отношении заданного расстояния между валком и матрицей и ограничивают доступные усилия для регулировочного механизма, посредством которых валки будут отодвигаться, если большие усилия необходимы для поддержания заданного расстояния. В случае увеличения расстояния между валками и матрицей это считается указанием на перегрузку гранулятора, и принимаются контрмеры по уменьшению нагрузки, например, в виде уменьшенной подачи материала.
Положение валков может регулироваться посредством регулировочного механизма, например, в виде блоков гидравлического поршневого цилиндра, при этом это положение измеряется обычно физическим положением указанного блока гидравлического поршневого цилиндра. В соответствии с настоящим изобретением, положение валков регулируют к заданному расстоянию между валком и матрицей, и ограничивают усилия, доступные для регулировочного механизма, в случае гидравлической системы, ограничением доступного гидравлического давления, посредством которого валки будут отодвигаться, если большие усилия необходимы для поддержания положения валков, и соответственно такое поведение валка, приводящее к отсутствию поддержания заданного расстояния между валком и матрицей, может считаться указанием на перегрузку гранулятора.
Более того, это поведение валка будет позволять перемещать часть гранулируемого материала к последующему валку, где он может быть прижат к матрице. Ограничение доступных усилий для регулировочного механизма также ограничивает возможное нарушение баланса между валками и, таким образом, напряжение на конструктивных частях гранулятора.
В этой связи, может быть предпочтительным обеспечение заданного увеличения расстояния до введения контрмер по уменьшению нагрузки. Это будет обеспечивать автоматическое распределение нагрузки между валками, что может приводить к преодолению склонности к перегрузке отдельного валка и последующему возобновлению нормальной обработки материала.
В предпочтительном варианте осуществления усилия, доступные для регулирования, ограничивают уровнем, равным уровню, необходимому для сохранения положения в нормальных условиях, плюс заданным значением, предпочтительно, например, 10% от него.
Пригодные контрмеры по уменьшению нагрузки на грануляторе могут включать в себя один или более из следующих этапов, на которых:
i) уменьшают подачу материала в гранулятор и/или к конкретному валку, для чего регистрируют указание на перегрузку,
ii) увеличивают расстояние между матрицей и валками или, если перегрузка относится к конкретному валку, между матрицей и конкретным валком, для которого указана перегрузка,
iii) позволяют короткую перегрузку на короткий срок, увеличивая гидравлическое давление для одного или более валков,
iv) обеспечивают совокупность выше упомянутого.
В предпочтительном варианте осуществления измерения положений отдельных валков используют в управлении с замкнутым контуром положениями валков. Более того, предпочтительно, что управление отдельным положением выполняется и находится в связи с измерением проскальзывания для отдельного валка, отдельное введение контрмер выполняют для каждого из валков.
В предпочтительном дополнительном варианте осуществления способа дополнительное измерение вращательной скорости каждого из валков может быть выполнено и в случае определения невращающегося валка или валка, катящегося с уменьшенной периферийной скоростью по сравнению с периферийной скоростью матрицы, это может считаться указанием на проскальзывание между валком и матрицей, и в такой ситуации могут быть приняты пригодные контрмеры по уменьшению нагрузки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В последующем подробном описании настоящего изобретения оно будет объяснено более подробно со ссылкой на примерные варианты осуществления способов управления гранулятором согласно изобретению в связи с гранулятором, который показан на чертежах, на которых:
Фиг.1 схематически показывает гранулятор, выполненный со средством для выполнения измерений и для управления гранулятором в соответствии со способом согласно настоящему изобретению, и
Фиг.2 схематически показывает приводное средство для матрицы гранулятора и для подачи материала в гранулятор.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
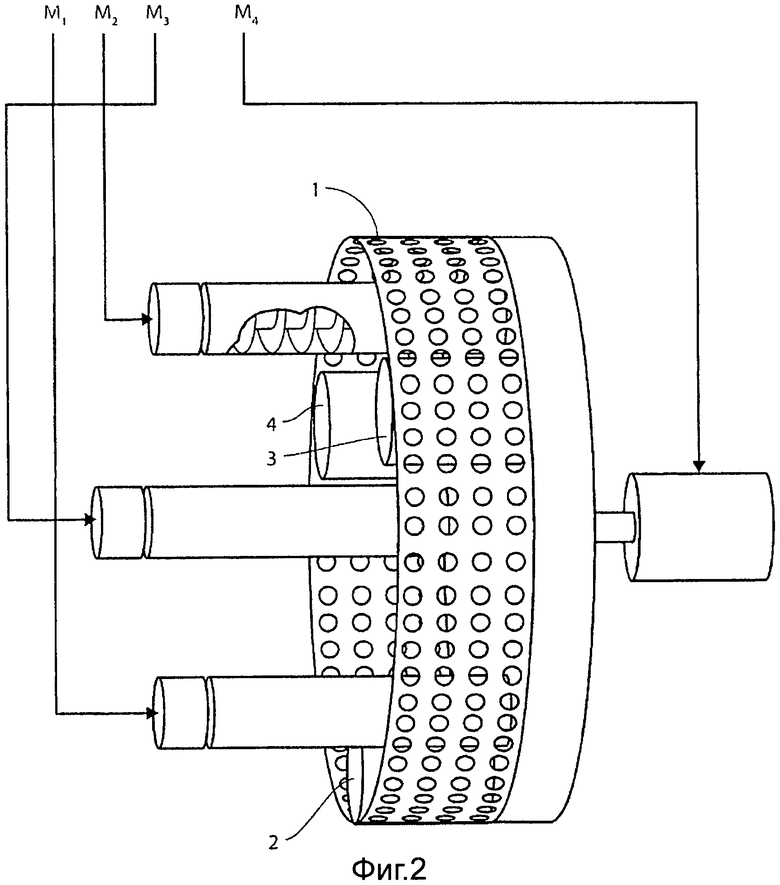
Гранулятор, показанный на фиг.1, выполнен с пригодным средством для измерения релевантных параметров для обеспечения управления гранулятором. Таким образом, фигура показывает средство 8, 9, 10 для измерения отдельных положений x, y, z валков гранулятора 11, 12, 13, 14 и для измерения вращательной скорости w1, w2, w3, w4 отдельных валков и матрицы.
Различные средства для выполнения измерений положения могут быть простыми детекторами линейного положения, детекторами вращательного положения или, в случае гидравлического привода для управления положением валков, измерением объема гидравлической текучей среды, измеряющим количество гидравлической текучей среды, поступающей в гидравлический цилиндр для управления положением валков.
Измерение вращательной скорости валков и матрицы, соответственно, может быть выполнено посредством оптических датчиков, индуктивных датчиков и т.д.
Контроллер, показанный на фиг.1, предусмотрен для преобразования выше упомянутых измерений в команды а, b, c для управления клапанами 17, 18, 19, управляющими положениями x, y, z регулировочных механизмов для расположения валков, например, в форме двусторонних гидравлических цилиндропоршневых блоков 5, 6, 7. Более того, такие регулировочные механизмы могут содержать обеспечение эксцентрично поддерживаемых осей для валков, причем указанные эксцентрично поддерживаемые оси вращаются посредством регулировочного механизма, соединенного с ними. Более того, контроллер способен управлять приводным двигателем М4 для матрицы, отдельными двигателями M1, M2, М3 подачи материала, подающими материал для отдельных валков, если представлены, и возможно, снова если представлены, приводными двигателями для отдельных валков (не показаны).
На фиг.1 схематически показано, что предусмотрено гидравлическое средство 16 подачи. Гидравлическое средство 16 подачи предпочтительно обеспечено ограничением максимального давления, посредством чего ограничивается максимальное усилие, доступное для сохранения валков в требуемом положении. Соответствующее ограничение максимального усилия также может быть естественным образом обеспечено в соединении с другими типами регулировочных приводных механизмов, таких как электрические приводные механизмы.
Благодаря обеспечению этого максимально доступного усилия, измерение положения валков может указывать на перегрузку отдельного валка посредством регулировочной системы, не способного сохранять требуемое положение.
Фиг.2 показывает двигатель M4 для приведения в движение матрицы 1 и нескольких двигателей М1, M2, М3 для подачи материала в гранулятор. Предпочтительно, предусмотрены отдельные двигатели для подачи материала в отдельные валки гранулятора для того, чтобы иметь возможность обеспечивать отдельное управление подачей материала и отдельное введение контрмер в соответствии с настоящим изобретением.
Управление двигателем для приведения в движение матрицы может включать преобразователь частоты для регулируемой вращательной скорости матрицы. Это обеспечивает возможность регулирования установленного значения вращательной скорости матрицы для того, чтобы обеспечивать возможность максимизации производительности гранулятора.
В связи с описанными чертежами проиллюстрированы некоторые предпочтительные признаки настоящего изобретения, однако, следует отметить, что не все вышеприведенные признаки необходимо применять для того, чтобы осуществить настоящее изобретение, которое ограничивается исключительно приложенной формулой изобретения. Таким образом, возможно осуществлять настоящее изобретение только с одним или предпочтительно по меньшей мере двумя валками, а также может быть использовано более чем три валка, как проиллюстрировано. Более того, различные измерения могут быть уменьшены до меньшего количества измерений, чем указано в приложенных фигурах. Также отдельная подача материала может быть исключена, и может быть использована общая подача для гранулятора. Предпочтительно, эта подача может регулироваться пригодным образом в соответствии с настоящим изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАНУЛЯТОР УЛУЧШЕННОЙ КОНСТРУКЦИИ | 2012 |
|
RU2563395C2 |
| ГРАНУЛЯТОР С УЛУЧШЕННОЙ СИСТЕМОЙ ПОДАЧИ И СПОСОБ ОБРАЗОВАНИЯ ГРАНУЛИРОВАННОГО МАТЕРИАЛА | 2012 |
|
RU2550468C1 |
| ПРЕСС-ГРАНУЛЯТОР ДЛЯ ИЗГОТОВЛЕНИЯ ГРАНУЛ | 2010 |
|
RU2568549C2 |
| ПРОКАТНЫЙ СТАН И СПОСОБ ПРОКАТКИ | 2012 |
|
RU2598735C2 |
| ПРЕСС-ГРАНУЛЯТОР ДЛЯ ИЗГОТОВЛЕНИЯ ГРАНУЛ | 2010 |
|
RU2566692C2 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВКИ ЗАЗОРА МЕЖДУ ЛЕЗВИЯМИ У БАРАБАННЫХ НОЖНИЦ ДЛЯ ПОПЕРЕЧНОЙ РЕЗКИ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ | 2015 |
|
RU2691008C2 |
| Устройство для изготовления гранул из вязкого материала | 1990 |
|
SU1724349A1 |
| ПРЕСС-ГРАНУЛЯТОР | 2011 |
|
RU2464171C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРЕССОВАННЫХ ДЕТАЛЕЙ | 1995 |
|
RU2113940C1 |
| Гранулятор для пастообразных материалов | 1980 |
|
SU939058A1 |
Изобретение относится к технологическому оборудованию для гранулирования материалов и может быть использовано при управлении гранулятором. Гранулятор содержит множество роликов, цилиндрическую матрицу, регулировочный механизм для регулирования расстояния между роликами и матрицей и приводной механизм для приведения во вращение матрицы и роликов. Управляют положением роликов посредством регулировочного механизма для обеспечения заданного расстояния между роликами и матрицей. Ограничивают усилие для указанного механизма, при котором происходит перемещение роликов по направлению от матрицы из положения на заданном расстоянии от нее. При этом величину ограниченного усилия задают равной сумме величины усилия, необходимого для сохранения положения роликов относительно матрицы, и заданной величины, предпочтительно составляющей, например, 10% от указанного усилия. Далее определяют возможное увеличение расстояния между роликами и матрицей. Увеличение этого расстояния относительно заданного уровня считают указанием на перегрузку гранулятора. Принимают контрмеры по уменьшению нагрузки. В результате обеспечивается своевременное предупреждение о перегрузке гранулятора и принятие соответствующих контрмер для исключения полной остановки гранулятора. 8 з.п. ф-лы, 2 ил.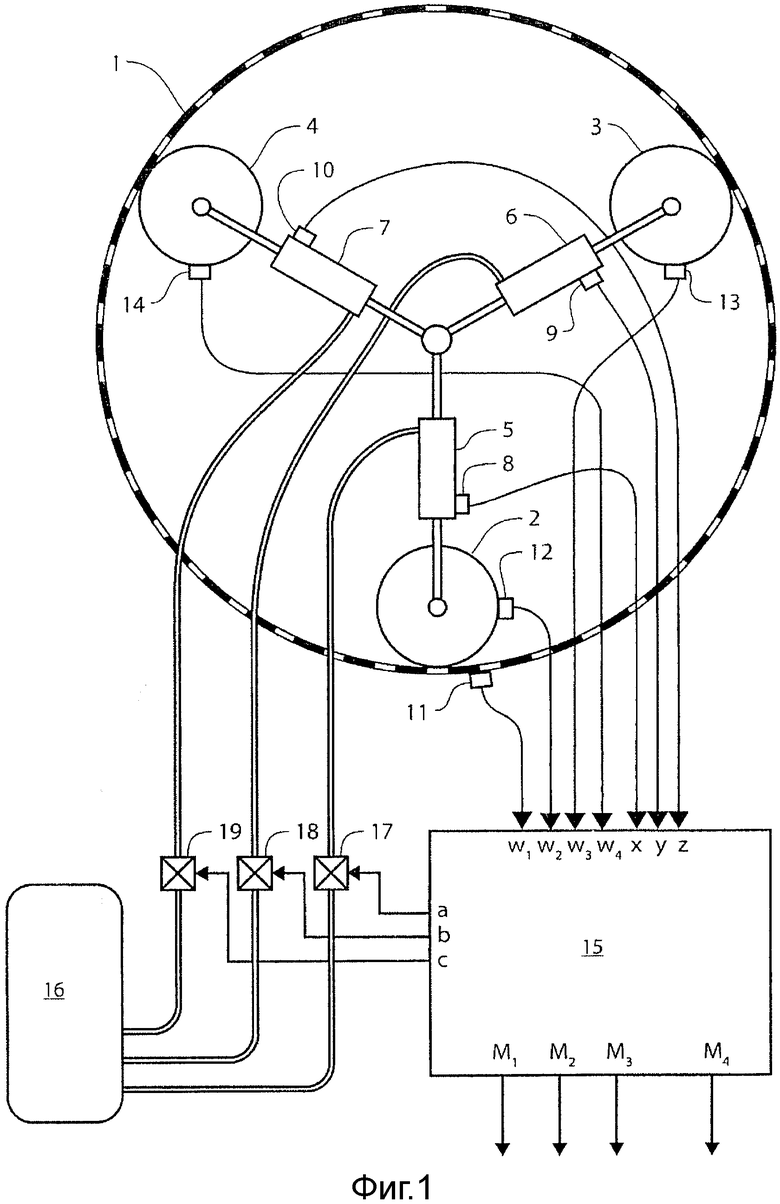
1. Способ управления нагрузкой гранулятора, содержащего
множество роликов (2, 3, 4),
цилиндрическую матрицу (1), выполненную с перфорациями, причем указанные ролики (2, 3, 4) установлены внутри указанной цилиндрической матрицы (1) для вдавливания гранулируемого материала через указанные перфорации,
регулировочный механизм (5, 6, 7) для регулирования расстояния между роликами и матрицей,
приводной механизм (M4) для приведения во вращение указанной матрицы (1) и указанных роликов (2, 3, 4),
причем способ включает этапы, на которых:
управляют положением (x, y, z) роликов (2, 3, 4) посредством регулировочного механизма (5, 6, 7) для обеспечения заданного расстояния между роликами (2, 3, 4) и матрицей (1),
ограничивают усилие для указанного регулировочного механизма (5, 6, 7), при котором происходит перемещение роликов (2, 3, 4) по направлению от матрицы из положения на заданном расстоянии от матрицы, при этом величину ограниченного усилия для регулировочного механизма задают равной сумме величины усилия, необходимого для сохранения положения (x, y, z) роликов относительно матрицы, и заданной величины, предпочтительно составляющей, например, 10% от указанного усилия,
обеспечивают определение возможного увеличения расстояния между роликами (2, 3, 4) и матрицей (1), при этом увеличение указанного расстояния относительно заданного уровня считают указанием на перегрузку гранулятора,
и принимают контрмеры по уменьшению нагрузки.
2. Способ по п. 1, дополнительно включающий в себя этапы, на которых выполняют измерения (8, 9, 10) положений (x, y, z) роликов и задают ограничение для измеренных значений, соответствующее заданному уровню расстояния между роликами (2, 3, 4) и матрицей (1), и используют указанные измерения для определения и указания на перегрузку гранулятора.
3. Способ по п. 1 или 2, в котором ограничение усилий для регулировочного механизма (5, 6, 7) выполняют посредством гидравлического цилиндропоршневого регулировочного механизма (5, 6, 7) для роликов (2, 3, 4) и ограничивают доступное гидравлическое давление для управления положением (x, y, z) роликов (2, 3, 4).
4. Способ по п. 1, в котором контрмеры по уменьшению нагрузки включают этап, на котором уменьшают подачу (M1, M2, M3) материала в гранулятор и/или к конкретному ролику (2, 3, 4), для чего регистрируют указание на перегрузку.
5. Способ по п. 1, в котором контрмеры включают этап, на котором увеличивают расстояние между роликами (2, 3, 4) и матрицей (1) и/или увеличивают расстояние между конкретным роликом (2, 3, 4) и матрицей (1), причем конкретный ролик представляет собой ролик, для которого указывают перегрузку.
6. Способ по п. 1, в котором измерение (8, 9, 10) положения (x, y, z) отдельных роликов (2, 3, 4) используют в управлении с замкнутым контуром положениями (x, y, z) роликов (2, 3, 4).
7. Способ по п. 1, в котором отдельное управление (5, 6, 7) положением выполняют для отдельных роликов (2, 3, 4) и для каждого ролика (2, 3, 4) выполняют отдельное введение контрмер.
8. Способ по п. 1, который дополнительно включает этапы, на которых:
измеряют вращательную скорость каждого ролика (w1, w2, w3), соответственно,
определяют, является ли ролик невращающимся, и принимают это за указание на перегрузку гранулятора, приводящее к принятию контрмер по уменьшению нагрузки.
9. Способ по п. 1, дополнительно включающий этапы, на которых:
выполняют измерения (11, 12, 13, 14) вращательной скорости (w4) матрицы и роликов (w1,w2,w3), соответственно,
вычисляют проскальзывание между роликами (2, 3, 4) и матрицей (1) и превышение указанного вычисленного проскальзывания для конкретного ролика (2, 3, 4) заданного ограничения считают указанием на неисправную работу гранулятора, приводящую к принятию контрмер по уменьшению нагрузки.
| ЦЕНТРИФУГА ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ВОЗДЕЙСТВИЕ ЛИНЕЙНЫХ УСКОРЕНИЙ | 0 |
|
SU371519A1 |
| Пресс-гранулятор | 1986 |
|
SU1380667A1 |
| Пресс-гранулятор | 1985 |
|
SU1291445A1 |
| Устройство для формования и вулканизации кольцевых резиновых изделий | 1973 |
|
SU472016A1 |
| US 5582847 A, 10.12.1996. | |||

