Изобретение относится к вычислительной технике и может быть использовано для создания программного обеспечения (ПО) бортовых управляющих вычислительных машин (УВМ) и управляющих вычислительных систем (УВС), которые являются центральным звеном систем автоматического управления (САУ) изделиями ракетно-космической техники (РКТ) и робототехнических комплексов (РТК). Одним из наиболее важных этапов создания ПО УВМ и систем является этап отработки созданных программ и подтверждения их корректной работы для различных наборов входных данных и состава обрабатываемой информации, что является достаточно трудоемким и продолжительным процессом, занимающим значительную часть времени проектирования САУ и требующим существенных материальных затрат. Поэтому во всем мире уделяется серьезное внимание как методике, так и средствам верификации ПО. Особенно большие сложности верификации ПО возникают при создании программ реального времени для бортовых УВМ и УВС, входящих в состав САУ объектами РКТ и РТК. Примерами таких систем являются УВМ, разработки НПОА, работавшие в составе РТК, при ликвидации последствий аварии на Чернобыльской АЭС, а также бортовые УВС различных предприятий, входящие в состав САУ изделий РКТ. Сложность создания ПО для таких САУ усугубляется наличием в его составе задач контроля исправности УВМ и УВС, задач нейтрализации, возникающих в процессе работы их собственных отказов, а также задач сохранения работоспособности САУ при деградации параметров компонентов (элементной базы) устройств за счет снижения производительности вычислительных средств и снятия с решения части задач меньшей важности. В результате ПО должно быть работоспособным в условиях изменения вычислительных ресурсов (быстродействия, в частности) в процессе работы и адаптироваться к этим изменениям. Известны принципы отладки ПО, используемые зарубежными специалистами для программ ЭВМ общего назначения (См. монографию «Наука отладки», авторы Мэтт Тэллес и Юань Хсих / перевод с английского / изд. КУДИН - ОБРАЗ, Москва, 2003, с.217). В основе отладки, предлагаемой авторами, лежит анализ результатов вычислений самим разработчиком ПО с выдачей на внешние носители, например, на цифровую печать промежуточных результатов вычислений при определенном наборе входных данных. Для этого в тексте программы делаются технологические вставки, обеспечивающие выдачу результатов для анализа. Недостатком такой отладки для бортовых УВС из-за их ограниченных вычислительных ресурсов является необходимость последующей коррекции программ после завершения отладки для устранения технологических вставок, что требует повторения проверок. Такая отладка совершенно непригодна для верификации программ, работающих в реальном масштабе времени с непрерывно меняющейся входной информацией, так как любые вставки в программу искажают реальное время обменов и вычислений. Достаточно полное решение задачи отработки ПО реального времени для управляющих вычислительных машин предлагают отечественные специалисты (см. Б.А. Микрин «Бортовые комплексы управления космическими аппаратами и проектирование их программного обеспечения», изд. МГТУ им. Н.Э. Баумана, 2003, с.243-249, рис.4.1). Для отработки аппаратуры и ПО предлагается комплексный моделирующий стенд (КМС), содержащий бортовую УВС с отрабатываемым программным обеспечением, пульт управления стендом, моделирующую вычислительную платформу на основе ЭВМ общего назначения (ЭВМОН) и полный комплект реальных датчиков и исполнительных устройств, связанных с УВС через аналого-цифровые и цифроаналоговые преобразователи. В состав КМС входит также комплект штатной аппаратуры космического аппарата, включая рабочие места экипажа. Такой состав аппаратуры комплексного стенда позволяет обеспечивать проверку правильности функционирования аппаратуры УВС и ее ПО в реальном времени. Однако в случае обнаружения ошибок нельзя выполнить их направленный поиск. Причиной является наличие аналоговой аппаратуры, из-за которой не обеспечивается повторяемость результатов в повторных включениях стенда, что является обязательным для направленного поиска ошибок. КМС не позволяет также проверить работу программного обеспечения для вариантов с нейтрализацией, возникающих в процессе штатной работы, катастрофических отказов или сбоев в аппаратуре УВС и САУ, так как недопустимо внесение неисправностей в штатную аппаратуру стенда из экономических соображений. Близкое к этому по техническому содержанию решение в виде Стенда полунатурного моделирования предлагают сотрудники Саратовского технического университета Авакумов А.В., Блескина Е.В. и Шкаев А.Е. (см. www.Sciteclibrary.ru). Предлагаемый ими стенд содержит собственно САУ, пульт управления и модель внешней среды, реализованную на ЭВМОН, от которой идет управление через цифроаналоговые преобразователи реальными датчиками для получения нужной входной информации УВС, а выходные управляющие сигналы и команды САУ воздействуют на реальные исполнительные механизмы, имеющие внутреннее управление от датчиков обратной связи, информация от которых также идет в модель. Такое построение стендов позволяет вести совместную проверку правильной работы аппаратуры САУ и ее ПО. Однако в случае неправильного функционирования САУ из-за ошибок ПО поиск ошибок практически не возможен. Причиной является то же наличие штатной аппаратуры с датчиками входной информации, цифроаналоговых и аналого-цифровых преобразователей, которые не позволяют провести несколько повторений вычислений цикла управления с полностью идентичной входной информацией. Кроме того, в такой системе тоже недопустимы проверки функционирования при возникновении неисправностей в бортовой аппаратуре по тем же причинам. Более того, даже просто создание такого стенда и поддержание его в рабочем состоянии требует существенных финансовых затрат, что ограничивает возможности верификации ПО. Наибольшие возможности для обеспечения оперативности и полноты проверки программ УВС с возможностью имитации отказов в работе аппаратуры САУ при разумных затратах предоставляет комплекс отладки (см. заявку на изобретение №201013316 от 05.08.2010, по которой принято решение о выдачи патента - Св. о гос. регистрации №2010133016/08 от 05.08.10). Данный комплекс можно принять за прототип. Комплекс содержит собственно бортовую УВМ, пульт управления комплексом, управляющую комплексом ЭВМОН (ПЭВМ) и имитаторы входной информации, подключенные выходами к УВМ. Такое построение обеспечивает стабильность и повторяемость результатов вычислений УВМ от «прогона» к «прогону». В комплексе обеспечивается также имитация возникновения отказов компонентов САУ, путем формирования соответствующей входной информации. Однако комплекс не позволяет проверить работоспособность ПО при возникновении отказов в блоках и устройствах самой штатной УВМ, а также затруднено получение промежуточной информации вычислений, необходимой для поиска ошибок ПО, так как использование в составе комплекса штатной аппаратуры не допускает внесение внутренних отказов в штатную аппаратуру и не обеспечивает доступ к внутренней памяти УВМ (регистрам, счетчикам и запоминающим устройствам). Введение технологических связей в штатную УВМ частично решает эту задачу, но требует введения аппаратурной избыточности, приводящей к снижению надежности штатной УВМ. Это для САУ РКТ недопустимо. Для обеспечения поиска ошибок в ПО без снижения надежности штатной УВМ в составе комплексов отработки целесообразно иметь УВМ, являющуюся для отработки ПО полным аналогом штатной, но допускающей имитацию отказов в ее аппаратуре и обеспечивающую доступ к внутренней памяти. Для решения этой задачи предлагается ТЕХНОЛОГИЧЕСКАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА, далее ТЕХНОЛОГИЧЕСКАЯ УВМ (ТУВМ).
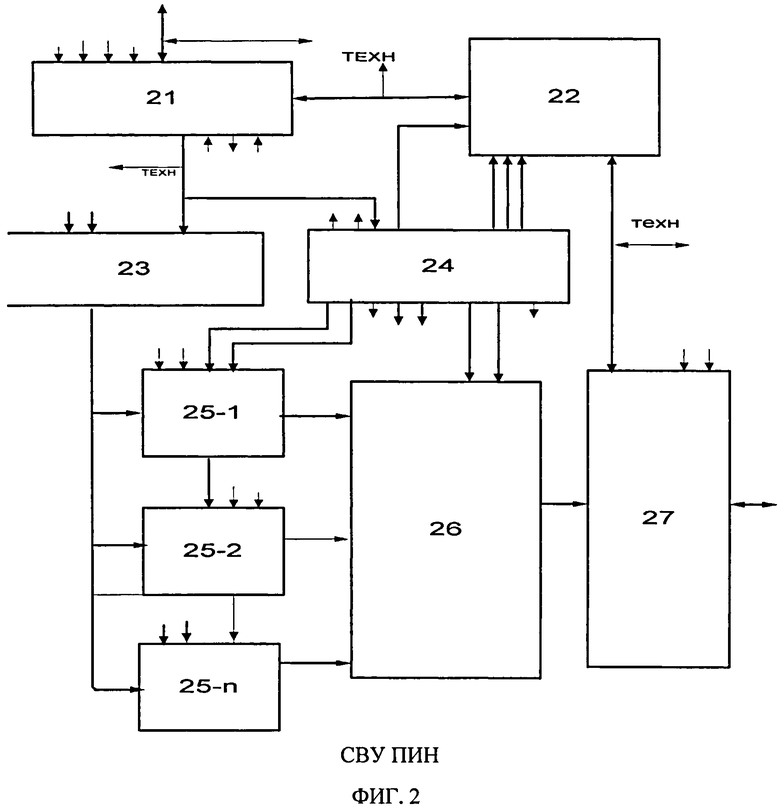
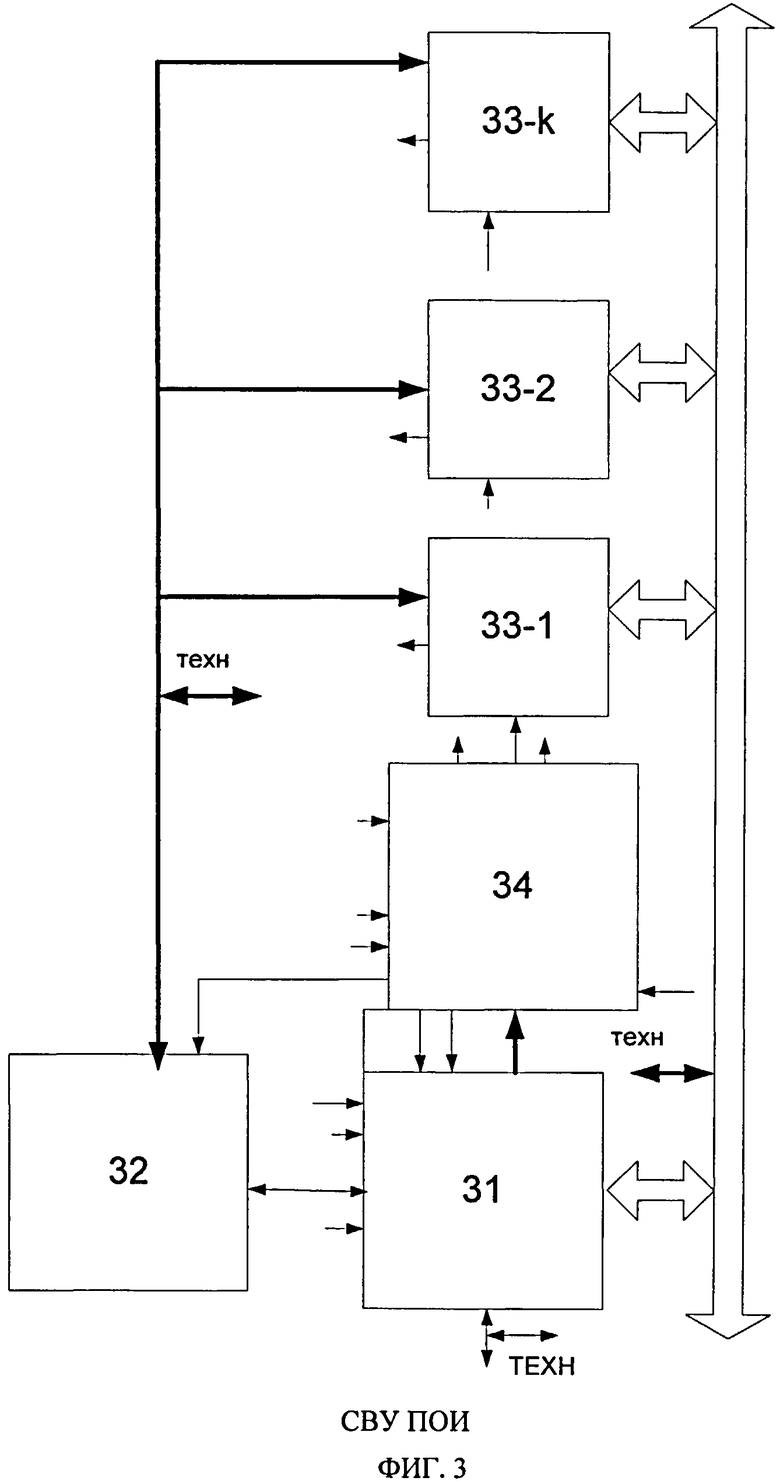
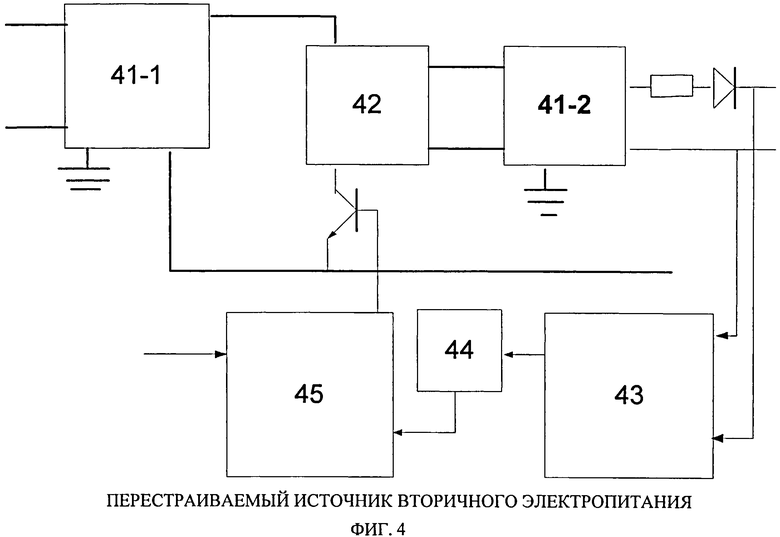
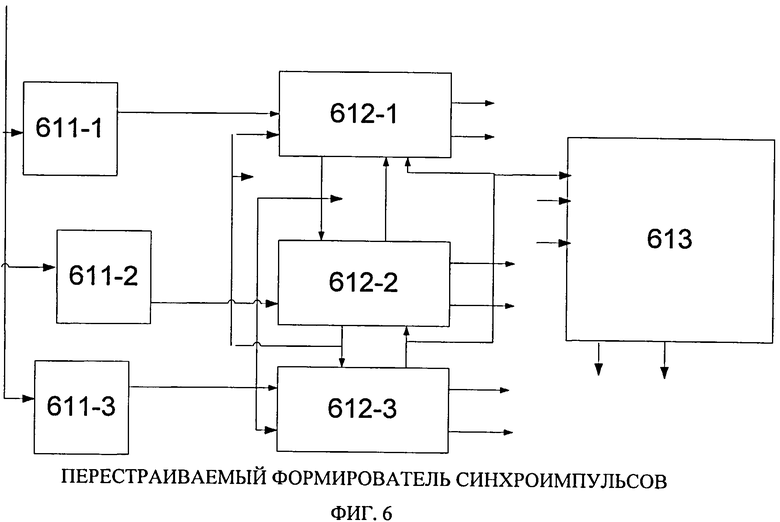
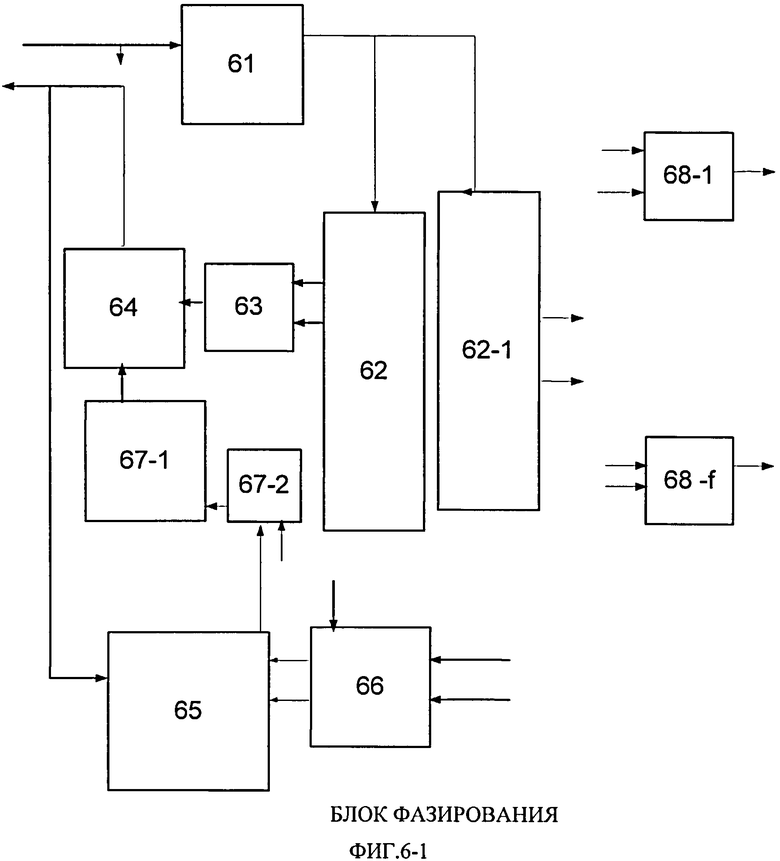
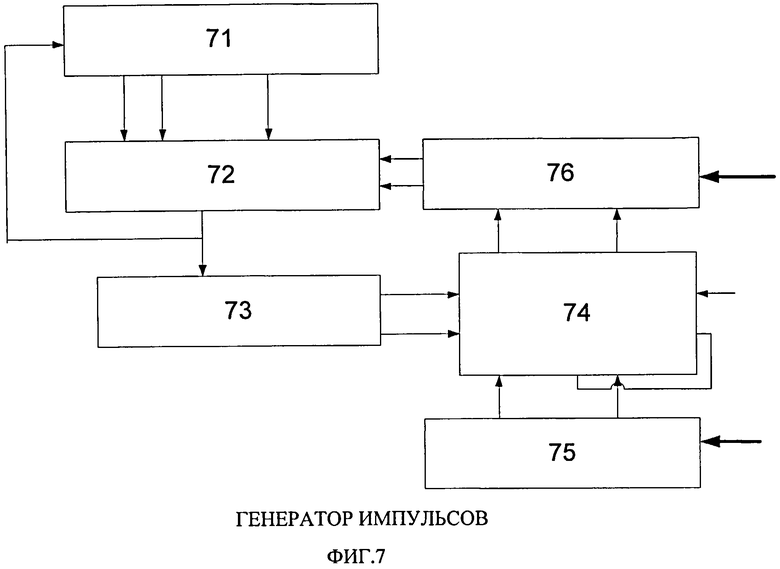
Состав ТУВМ приведен на фигуре 1, где цифрой 1 обозначен процессор, цифрой 2 обозначено вычислительное устройство подсистемы инерциальной навигации (ПИН), цифрой 3 обозначено запоминающее устройство (ЗУ), цифрой 4 обозначено вычислительное устройство подсистемы обработки изображений (ПОИ), цифрой 5 обозначен блок микропрограммного управления (БМУ), цифрой 6 обозначен перестраиваемый с кодовым управлением формирователь синхроимпульсов (ФСИ), и цифрой 7 обозначен перестраиваемый с кодовым управлением источник вторичного электропитания (ИВЭП). Оба вычислительных устройства и ЗУ подключены к процессору через магистраль, подключение к которой управляющей ЭВМ комплекса обеспечивает в режиме останова доступ к ЗУ, внутренней памяти процессора и СВУ. Входы управления ФСИ и ИВЭП являются управляющим входом ТУВМ, подключенным к управляющей ЭВМ комплекса отладки. Силовой вход ИВЭП является входом ТУВМ, а выходы ФСИ и ИВЭП подключены к соответствующим входам процессора, СВУ и ЗУ. На фигуре 2 приведен состав вычислительного устройства ПИН. Вычислительное устройство содержит микропроцессор 21, входы которого являются входами ТУВМ, подключаемыми к выходам датчиков или имитаторов ПИН, первый вход-выход микропроцессора является входом-выходом вычислительного устройства, подключенным к магистрали связи с процессором, и одновременно служит технологической связью вычислительного устройства, подключаемой к управляющей ЭВМ и регистратору комплекса. Второй вход-выход микропроцессора, подключенный к локальному запоминающему устройству 22, также является технологической связью вычислительного устройства и ТУВМ, подключаемой к управляющей ЭВМ и регистратору комплекса. Выход микропроцессора подключен к буферному регистру 23 и установочному входу первого блока микропрограммного управления (БМУ) 24 со своим встроенным управляемым ФСИ. Выход буферного регистра подключен к первым входам n последовательно соединенных шинами переноса умножителей (обозначенных цифрами от 25-1 до 25-п) и подключенных выходами к входам сумматора 26, подключенного выходом к блоку связи 27, вход-выход которого является технологическим входом-выходом устройства и ТУВМ, подключенным к магистрали связи с процессором. Двунаправленной шиной, являющейся одновременно технологической, блок связи подключен к локальному ЗУ. Выходы первого БМУ подключены к микропрограммным входам умножителей, сумматора, локального ЗУ, микропроцессора и блока связи. На фигуре 3 приведено СВУ ПОИ, где цифрой 31 обозначен управляющий микропроцессор, входы которого являются входами вычислительного устройства, подключаемые к датчикам или имитаторам ПОИ. Вход-выход управляющего микропроцессора является технологическим для ТУВМ и входом-выходом вычислительного устройства, подключенным к магистрали связи с процессором. Через двунаправленную связь к этому микропроцессору подключено местное ЗУ 32, а через первую магистральную шину, имеющую также и технологический вход-выход, к нему подключено k вычислительных микропроцессоров, обозначенных цифрами от 33-1 до 33-k. Эти микропроцессоры через вторую магистральную шину, также с технологической связью, подключены к местному ЗУ, а их выходы признаков подключены к входам признаков второго БМУ 34, установочный вход которого подключен к одноименному выходу управляющего микропроцессора, а управляющий вход БМУ является одноименным входом устройства и ТУВМ и служит для управления частотой встроенного в БМУ ФСИ. Выходы БМУ подключены к микропрограммным входам всех микропроцессоров и местного запоминающего устройства. Состав управляемого ИВЭП приведен на фигуре 4. Источник вторичного электропитания содержит последовательно соединенные входной фильтр 41-1, трансформатор 42 с включенным в первичную обмотку транзистором-прерывателем и выпрямитель с выходным фильтром нижних частот 41-2, после которого на выходе установлены последовательно соединенные резистор и диод, выход которого является выходом источника, подключенным к цепи обратной связи, состоящей из последовательно соединенных преобразователя напряжения в частоту 43, элемента развязки 44 и частотно-импульсного модулятора 45, подключенного выходом к базе транзистора прерывателя. При этом управляющий вход модулятора является управляющим входом ИВЭП и ТУВМ, подключенным к управляющей ЭВМ комплекса. Генератор импульсов, входящий в формирователь синхроимпульсов, приведен на фигуре 4-1 и содержит группу последовательно соединенных инверторов 411, выходы которой подключены к входам мультиплексора 412, подключенного выходом к входу первого инвертора группы, образуя тем самым кольцевой генератор импульсов. Кроме того, формирователь содержит счетчик частоты 413, вход которого является входом формирователя, подключенным к элементу развязки. Выходы этого счетчика подключены к первым входам схемы сравнения 414, ко вторым входам которой подключены выходы регистра кода частоты 415, а инкрементный и декрементный выходы схемы сравнения подключены к одноименным входам счетчика кода частоты 416, подключенного выходами к управляющим входам мультиплексора. При этом входы регистра 415 и счетчика 416 являются управляющим входом формирователя и ИВЭП. Состав блока микропрограммного управления приведен на фигуре 5. Блок содержит регистр кода операций 51, регистр признаков 52, входы признаков которого являются входами блока, счетчик команд 53 и регистр смещения 54, вход которого подключен к адресному выходу запоминающего устройства микрокоманд 55, остальные выходы которого являются выходами микрокоманд блока, а адресный вход этого запоминающего устройства образуют выходы всех регистров и счетчика, установочные входы которых являются установочным входом блока, который, кроме того, содержит устройство синхронизации 56, выходы которого подключены к синхронизирующим входам счетчика, регистров и запоминающего устройства микрокоманд. Формирователь синхроимпульсов приведен на фигуре 6. Он содержит три генератора импульсов первый 611-1, второй 611-2 и третий 611-3, управляющий вход которых является входом формирователя, а выход каждого из них подключен к входу своего блока фазирования, соответственно первого 612-1, второго 612-2 и третьего 612-3, фазирующий выход каждого из этих блоков подключен к фазирующим входам двух других блоков и фазирующим входам блока мажоритации 613, к синхронизирующим входам которого подключены синхронизирующие выходы блоков фазирования, а выходы блока мажоритации являются выходами формирователя. Блок фазирования приведен на фигуре 6-1. Он содержит первый элемент И 61, первый вход которого является входом блока, подключенным к генератору импульсов. Выход элемента подключен к входам счетчика 62 и сдвигового регистра 62-1. Выходы счетчика подключены к входам дешифратора 63, выход которого подключен к запускающему входу триггера останова 64, выход которого является фазирующим выходом блока и подключен ко второму входу первого элемента И и первому входу мажоритарного элемента 65, ко второму и третьему входу которого подключены выходы триггеров привязки 66, стробирующий вход которых объединен с первым входом первого элемента И, а входы являются входами фазирования блока. Выход мажоритарного элемента подключен к первому входу второго элемента И 67-1, второй вход которого является входом останова блока, ФСИ и ТУВМ, подключенным к пульту управления комплекса отладки. Выход второго элемента И подключен к входу триггера пуска 67-2, подключенного выходом к сбрасывающему входу триггера останова. При этом выходы четных и нечетных разрядов сдвигового регистра подключены соответственно к запускающим и сбрасывающим входам триггеров формирователей (68-1 - 68-f), выходы которых являются синхронизирующими выходами блока и ФСИ. Перестраиваемый генератор импульсов приведен на фигуре 7 и содержит n последовательно соединенных инверторов 71, выходы которых подключены к входам генераторного мультиплексора 72, выход которого подключен к входу первого инвертора, образуя тем самым кольцевой генератор, и входу генераторного счетчика 73, выходы которого подключены к первым входам генераторной схемы сравнения 74, ко вторым входам которой подключены выходы генераторного регистра кода 75, а инкрементный и декрементный выходы схемы сравнения подключены к одноименным входам генераторного счетчика частоты 76, вход которого и вход регистра 75 являются установочным входом генератора импульсов.
Технологическая УВМ работает следующим образом. Перед началом отладки программ из управляющей ЭВМ в запоминающие устройства ТУВМ и СВУ загружаются массивы заранее рассчитанной информации, соответствующие работе системы управления в отрабатываемом режиме. В ФСИ и ИВЭП заносятся коды, задающие исходные номиналы питания и выходных частот. В требуемый для анализа момент реального времени с пульта управления в ФСИ посылается сигнал останова, по которому прекращается формирование синхроимпульсов, все внутренние шины устанавливаются в высокоимпендансное состояние и внутренняя память и все регистры устройств и блоков ТУВМ становятся доступны через технологические связи. Из них можно списать информацию для анализа, не искажая логики и времени работы программ. В процессе отладки ПО информация с технологических выходов ТУВМ может фиксироваться в регистраторе, из которого считываться управляющей ЭВМ для анализа оператором. После завершения анализа по заданию оператора пультом управления снимается сигнал останова. Формирователи синхроимпульсов ТУВМ начинают работу, и программы продолжают выполняться без нарушения реального времени. Наличие в ТУВМ управляемых кодом ИВЭП И ФСИ позволяют имитировать внутренние отказы, а также проверить работу программ в реальном времени при изменении быстродействия (производительности) реальной УВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| КОНТРОЛЛЕР ПЕРЕДАЧИ ДАННЫХ | 2013 |
|
RU2514135C1 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| КОМПЛЕКС ОТЛАДКИ | 2010 |
|
RU2448363C1 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ ДАННЫХ | 2011 |
|
RU2444052C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2536434C2 |
| СИСТЕМА ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2452125C1 |
| СБОЕУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2541839C2 |
| МАГИСТРАЛЬНО-МОДУЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2564626C2 |


Изобретение относится к вычислительной технике. Техническим результатом является обеспечение поиска ошибок в программном обеспечении без снижения надежности штатной управляющей вычислительной машины. Технологическая управляющая вычислительная машина (ТУВМ) содержит: процессор с подключенными к нему через магистраль запоминающим устройством и вычислительными устройствами подсистемы инерциальной навигации и подсистемы обработки изображений, блок микропрограммного управления, перестраиваемый формирователь синхроимпульсов и перестраиваемый источник вторичного электропитания. ТУВМ выполнена с возможностью загружать из управляющей ЭВМ в запоминающие устройства и вычислительных устройств подсистем инерциальной навигации и обработки изображений массивы заранее рассчитанной информации, соответствующие работе системы управления в отрабатываемом режиме. Перестраиваемые формирователь синхроимпульсов и источник вторичного электропитания выполнены с возможностью имитировать внутренние отказы и изменения быстродействия реальной управляющей вычислительной машины. Перестраиваемый формирователь синхроимпульсов выполнен с возможностью принимать сигнал останова с пульта управления управляющей ЭВМ, внутренняя память и все регистры устройств и блоков технологической ЭВМ становятся доступны через технологические связи, из которых информация считывается управляющей ЭВМ для анализа оператором. 7 з.п. ф-лы, 9 ил.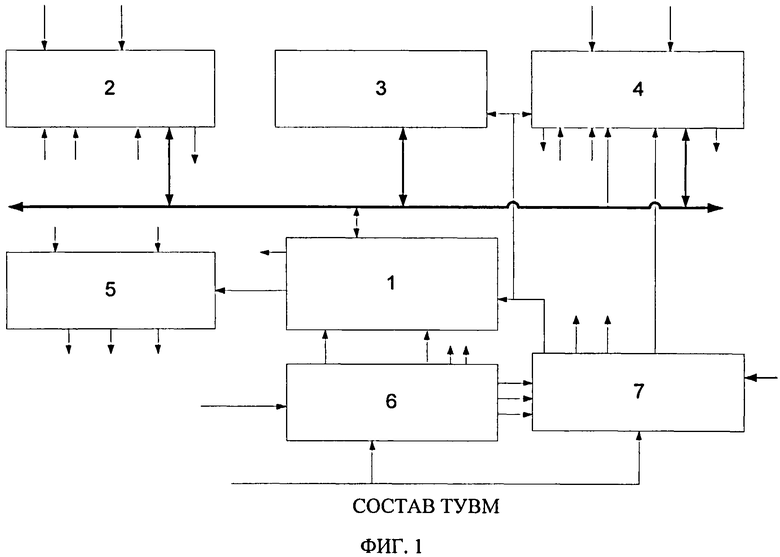
1. Технологическая управляющая вычислительная машина, содержащая процессор с подключенными к нему через магистраль запоминающим устройством и вычислительными устройствами подсистемы инерциальной навигации и подсистемы обработки изображений, блок микропрограммного управления, отличающаяся тем, что в ее состав введены перестраиваемый формирователь синхроимпульсов и перестраиваемый источник вторичного электропитания, управляющие входы которых являются управляющим входом вычислительной машины, а выходы подключены к соответствующим входам процессора, запоминающего устройства и вычислительного устройства подсистемы инерциальной навигации и вычислительного устройства подсистемы обработки изображений, а силовой вход источника является входом вычислительной машины; при этом вычислительные устройства подсистемы инерциальной навигации и обработки изображений и запоминающее устройство подключены к управляющей ЭВМ; при этом технологическая УВМ выполнена с возможностью загружать из управляющей ЭВМ в запоминающие устройства и вычислительных устройств подсистем инерциальной навигации и обработки изображений массивы заранее рассчитанной информации, соответствующие работе системы управления в отрабатываемом режиме; перестраиваемые формирователь синхроимпульсов и источник вторичного электропитания выполнены с возможностью принимать коды от управляющей ЭВМ, которые задают номиналы питания и выходные частоты, а также выполнены с возможностью имитировать внутренние отказы и изменения быстродействия реальной управляющей вычислительной машины; перестраиваемый формирователь синхроимпульсов выполнен с возможностью принимать сигнал останова с пульта управления управляющей ЭВМ, по которому прекращается формирование синхроимпульсов и все внутренние шины устанавливаются в высокоимпендансное состояние, внутренняя память и все регистры устройств и блоков технологической ЭВМ становятся доступны через технологические связи, из которых информация считывается управляющей ЭВМ для анализа оператором.
2. Технологическая УВМ по п. 1, отличающаяся тем, что вычислительное устройство подсистемы инерциальной навигации содержит микропроцессор, входы и вход-выход которого являются входами и входом-выходом устройства, а через первую двунаправленную шину к нему подключено локальное запоминающее устройство, подключенное второй двунаправленной шиной к блоку связи, вход-выход которого является вторым входом-выходом устройства, а выход микропроцессора подключен к входу первого блока микропрограммного управления и буферного регистра, выход которого подключен к входам n умножителей, связанных последовательно между собой шинами переноса и подключенных выходами к сумматору, выход которого подключен к блоку связи, при этом выходы блока микропрограммного управления подключены к микропрограммным входам микропроцессора, умножителей, сумматора и блока связи.
3. Технологическая УВМ по п. 1, отличающаяся тем, что вычислительное устройство подсистемы обработки изображений содержит управляющий микропроцессор с подключенным к нему местным запоминающим устройством и подключенными к нему через первую магистраль k вычислительными микропроцессорами, связанными через вторую магистраль с местным запоминающим устройством, а входы и двунаправленный вход-выход управляющего микропроцессора являются входами и входом-выходом устройства, а его управляющий выход подключен к управляющему входу второго блока микропрограммного управления, входы признаков которого подключены к выходам признаков вычислительных микропроцессоров, управляющий вход блока является одноименным входом устройства, а микропрограммные и синхронизирующие выходы блока подключены к соответствующим входам всех микропроцессоров, и местного запоминающего устройства.
4. Технологическая УВМ по п. 1, отличающаяся тем, что источник вторичного электропитания содержит последовательно соединенные входной фильтр, вход которого является входом источника, трансформатор с включенным в первичную обмотку транзистором прерывателем, выпрямитель с фильтром нижних частот, резистор и диод, выход которого является выходом источника, подключенным к преобразователю напряжения в частоту, подключенного через элемент развязки к частотно-импульсному модулятору, выход которого подключен к базе транзистора прерывателя.
5. Технологическая УВМ по п. 1, отличающаяся тем, что блок микропрограммного управления содержит регистр кода операций, регистр признаков, счетчик команд и регистр смещения, установочный вход которых является входом блока, а их выходы образуют адресную шину, подключенную к адресному входу запоминающего устройства микрокоманд, адресный выход которого подключен к входу регистра смещения, остальные выходы являются микропрограммными выходами блока, входы признаков которого являются входами регистра признаков, а синхронизирующие выходы блока являются выходами входящего в состав устройства синхронизации, управляющий вход которого является одноименным входом блока, при этом группа синхроимпульсов формирователя подключена к синхронизирующим входам регистров, счетчика и запоминающего устройства микрокоманд, а входы счетчика кода частоты и регистра кода частоты являются управляющим входом формирователя.
6. Технологическая УВМ по п. 1, отличающаяся тем, что формирователь синхроимпульсов содержит первый, второй и третий генераторы импульсов, вход которых является управляющим входом формирователя, а выход каждого из них подключен к входу своего, соответственно первого, второго и третьего блоков фазирования, фазирующий выход каждого из которых подключен к фазирующим входам двух других блоков и фазирующим входам блока мажоритации, а синхронизирующие выходы подключены к синхронизирующим входам блока мажоритации, выходы которого являются выходами формирователя.
7. Технологическая УВМ по п. 6, отличающаяся тем, что блок фазирования содержит первый элемент И, первый вход которого является входом блока, а выход подключен к входу сдвигового регистра и входу счетчика, подключенного выходами к входам дешифратора, выход которого подключен к запускающему входу триггера останова, выход которого является фазирующим выходом блока и подключен ко второму входу первого элемента И и к первому входу мажоритарного элемента, ко второму и третьему входу которого подключены выходы триггеров привязки, стробирующий вход которых объединен с первым входом первого элемента И, а входы являются фазирующими входами блока, причем выход мажоритарного элемента подключен к первому входу второго элемента И, второй вход которого является входом останова блока, а выход подключен к входу триггера пуска, выход которого подключен к сбрасывающему входу триггера останова, при этом выходы нечетных и четных разрядов сдвигового регистра подключены соответственно к запускающим и сбрасывающим входам триггеров формирователей, выходы которых являются синхронизирующими выходами блока.
8. Технологическая УВМ по п. 6, отличающаяся тем, что генератор импульсов содержит n последовательно соединенных инверторов, подключенных выходами к входам генераторного мультиплексора, выход которого подключен к входу первого инвертора и входу генераторного счетчика, подключенного выходами к первым входам генераторной схемы сравнения, ко вторым входам которой подключены выходы генераторного регистра кода частоты, а инкрементный и декрементный выходы схемы сравнения подключены к одноименным входам генераторного счетчика кода частоты, подключенного выходами к управляющим входам генераторного мультиплексора, причем входы генераторного счетчика кода частоты и генераторного регистра кода частоты являются управляющим входом генератора.
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| Автоматическая сцепка для рудничных вагонеток | 1949 |
|
SU87815A1 |
| Приспособление для контроля биения шеек многоопорных коленчатых валов двигателей по индикатору | 1949 |
|
SU84995A1 |
| СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ | 1993 |
|
RU2072546C1 |
| Устройство для формирования импульсов | 1983 |
|
SU1223218A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для подачи огнетушащей жидкости | 1980 |
|
SU910168A1 |
| Фильтр напряжения прямой последовательности фаз | 1952 |
|
SU98571A1 |

