Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям угловой скорости.
Известен датчик угловой скорости [1], содержащий ротор, датчик угла, датчик момента, усилитель, к выходу которого подключена компенсационная катушка датчика момента.
Наиболее близким по технической сущности является датчик угловой скорости [2], содержащий динамически настраиваемый гироскоп (ДНГ) с датчиками угла и момента по каждой из двух измерительных осей датчика угловой скорости (ДУС), усилитель переменного тока, фазовый демодулятор и усилитель постоянного тока по каждой из двух измерительных осей ДУС, источник питания переменного тока, причем на роторе ДНГ установлены два кольцевых постоянных магнита, общих для датчиков момента по двум измерительным осям ДУС, датчик момента по каждой из измерительных осей ДУС содержит компенсационную катушку на корпусе ДНГ, датчик угла по каждой из измерительных осей ДУС выполнен по мостовой схеме и содержит установленные в корпусе первый и второй сердечники, на каждом из которых выполнена обмотка, два резистора, обмотки первого и второго сердечников соединены последовательно и подключены к источнику питания переменного тока, резисторы соединены последовательно и подсоединены к источнику питания переменного тока, по каждой измерительной оси ДУС точка соединения обмоток первого и второго сердечников подключена к входу усилителя переменного тока, к выходу усилителя постоянного тока подключена компенсационная катушка датчика момента.
Недостатком такого датчика угловой скорости является погрешность измерения угловой скорости, вызванная дрейфами выходных сигналов датчика угловой скорости вследствие дрейфа нулевого сигнала датчика угла.
Техническим результатом изобретения является повышение точности измерения угловой скорости.
Данный технический результат достигается в датчике угловой скорости, содержащем динамически настраиваемый гироскоп (ДНГ) с датчиками угла и момента по каждой из двух измерительных осей датчика угловой скорости (ДУС), усилитель переменного тока, фазовый демодулятор и усилитель постоянного тока по каждой из двух измерительных осей ДУС, источник питания переменного тока, причем на роторе ДНГ установлены два кольцевых постоянных магнита, общих для датчиков момента по двум измерительным осям ДУС, датчик момента по каждой из измерительных осей ДУС содержит компенсационную катушку на корпусе ДНГ, датчик угла по каждой из измерительных осей ДУС выполнен по мостовой схеме и содержит установленные в корпусе первый и второй сердечники, на каждом из которых выполнена обмотка, два резистора, обмотки первого и второго сердечников соединены последовательно и подключены к источнику питания переменного тока, резисторы соединены последовательно и подсоединены к источнику питания переменного тока, по каждой измерительной оси ДУС точка соединения обмоток первого и второго сердечников подключена к входу усилителя переменного тока, к выходу усилителя постоянного тока подключена обмотка датчика момента, тем, что по каждой из его измерительных осей введены первый, второй и третий дифференциальные усилители, один из выходов источника питания переменного тока подключен к прямому входу первого дифференциального усилителя, к инверсному входу которого подсоединен второй выход источника питания переменного тока, один из выводов обмотки на одном из сердечников датчика угла подсоединен к прямому входу второго дифференциального усилителя, к инверсному входу которого подключен второй вывод вышеуказанной обмотки, выход первого дифференциального усилителя подключен к прямому входу третьего дифференциального усилителя, инверсный вход которого соединен с выходом второго дифференциального усилителя, коэффициент усиления первого дифференциального усилителя установлен относительно коэффициента усиления второго дифференциального усилителя, равным отношению напряжения на обмотке к выходному напряжению источника питания переменного тока.
Посредством введения в датчик угловой скорости по каждой его измерительной оси первого, второго и третьего дифференциальных усилителей, подключения к выходам источника питания переменного тока первого дифференциального усилителя, подключения к одной из обмоток сердечников датчика угла входов второго дифференциального усилителя, подсоединения выходов первого и второго дифференциальных усилителей к входам третьего дифференциального усилителя, установления коэффициента усиления первого дифференциального усилителя относительно коэффициента усиления второго дифференциального усилителя, равным отношению напряжения на обмотке к выходному напряжению источника питания переменного тока, обеспечивается измерение изменений сигналов мостовой схемы датчика угла, вызванных дрейфом нулевого сигнала датчика угла, приводящих к дрейфу выходного сигнала датчика угловой скорости. Полученные экспериментальными исследованиями или теоретическими зависимостями соотношения между дрейфом нулевого сигнала и дрейфом выходного сигнала датчика угловой скорости дают возможность корректировать выходной сигнал датчика угловой скорости с целью исключения его дрейфа. В результате повышается точность измерения угловой скорости посредством датчика угловой скорости по его двум измерительным осям.
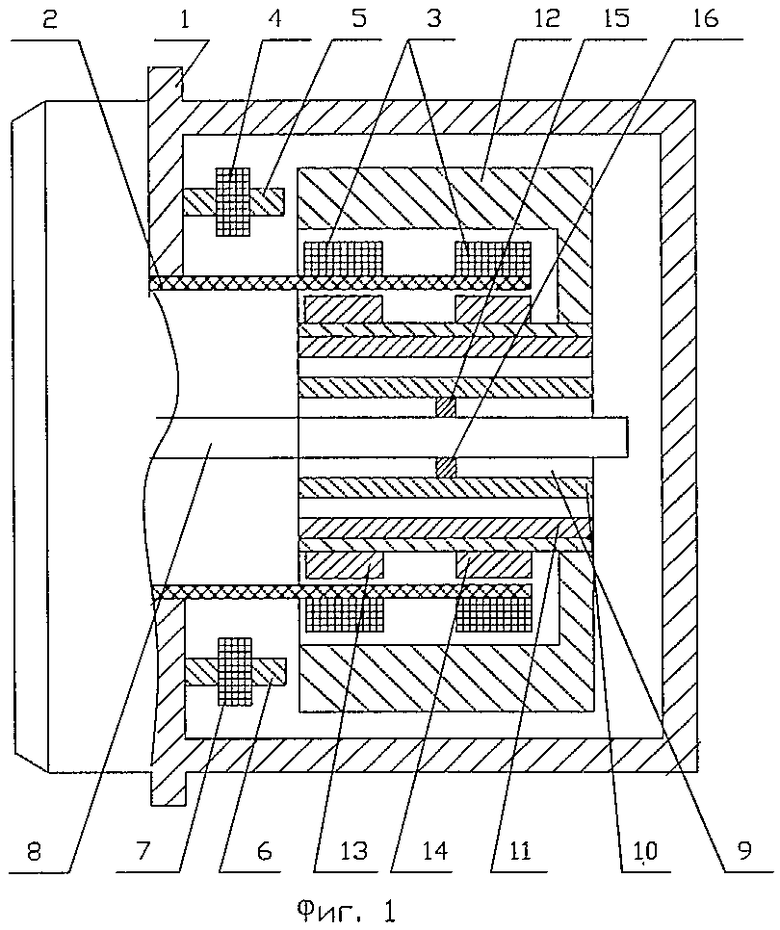
На фиг.1 представлен фронтальный вид динамически настраиваемого гироскопа, на фиг.2 - горизонтальный вид динамически настраиваемого гироскопа, на фиг.3 - электрическая схема датчика угловой скорости по одной из его измерительных осей.
Динамически настраиваемый гироскоп (ДНГ) (фиг.1) содержит корпус 1, в котором установлена обойма 2 с компенсационной катушкой 3 датчика момента по первой измерительной оси ДНГ, первый сердечник 4 с обмоткой 5 и второй сердечник 6 с обмоткой 7 датчика угла по второй измерительной оси ДНГ. На валу 8, соединенном с осью двигателя ДНГ (на фиг.1 не показан), установлен двухстепенный упругий подвес 9, состоящий из внутреннего кольца 10 и внешнего кольца 11, на котором расположен ротор 12 ДНГ с первым 13 и вторым 14 кольцевыми постоянными магнитами на нем. Внутреннее кольцо 10 соединено с валом 8 торсионами 15, 16.
Торсионы 17, 18 (фиг.2) соединяют внутреннее кольцо 10 с внешним кольцом 11. Таким образом, образован двухстепенный упругий подвес ротора 12 ДНГ. Компенсационная катушка 19 датчика момента по второй измерительной оси ДУС установлена на обойме 2. На корпусе 1 ДНГ расположены первый сердечник 20 с обмоткой 21 и второй сердечник 22 с обмоткой 23 датчика угла по первой измерительной оси ДУС.
В датчике угловой скорости (фиг.3) по первой измерительной оси обмотка 21 первого сердечника 20 датчика угла и обмотка 23 второго сердечника 22 датчика угла по первой измерительной оси ДУС соединены последовательно и подсоединены к источнику питания 24 переменного тока. Резисторы R1 и R2 соединены последовательно и подключены к источнику питания 24 переменного тока. Таким соединением резисторов R1, R2 и обмоток 21, 23 образована мостовая схема датчика угла по первой измерительной оси ДУС. Точка соединения обмотки 21 с обмоткой 23 подсоединена к входу усилителя 25 переменного тока, выход которого подключен к входу фазового демодулятора 26. К выходу фазового демодулятора 26 подсоединен вход усилителя 27 постоянного тока, к выходу которого подключен первый вывод компенсационной катушки 3 датчика момента по первой измерительной оси ДУС. Ко второму выводу компенсационной катушки 3 подключен эталонный резистор Rэ.
Один из выходов источника питания 24 переменного тока подключен к прямому входу первого дифференциального усилителя 28, к инверсному входу которого подсоединен второй выход источника питания 24 переменного тока. Один из выводов обмотки 21 на сердечнике 20 датчика угла подсоединен к прямому входу второго дифференциального усилителя 29, к инверсному входу которого подключен второй вывод обмотки 21 на сердечнике 20. Выход первого дифференциального усилителя 28 подключен к прямому входу третьего дифференциального усилителя 30, инверсный вход которого соединен с выходом второго дифференциального усилителя 29.
Коэффициент усиления первого дифференциального усилителя 28 установлен относительно коэффициента усиления второго дифференциального усилителя 29 равным отношению напряжения на обмотке 21 к выходному напряжению источника питания 24 переменного тока.
Аналогично со схемой фиг.3 выполнена схема датчика угловой скорости по второй измерительной оси, в которой в мостовую схему датчика угла включены обмотки 5, 7 на первом 4 и втором 6 сердечниках датчика угла, и на выход усилителя постоянного тока 27 включена компенсационная катушка 19 датчика момента.
Датчик угловой скорости работает следующим образом. При наличии угловой скорости, например по первой измерительной оси ДУС, происходит изменение углового положения ротора 12 ДНГ относительно корпуса 1. При этом изменяются индуктивные сопротивления обмоток 21 и 23, расположенных на первом 20 и втором 22 сердечниках датчика угла по первой измерительной оси ДУС, происходит разбаланс мостовой схемы датчика угла по первой измерительной оси ДУС, и на вход усилителя 25 переменного тока поступает сигнал рассогласования следящей системы ДУС по первой измерительной оси ДУС, который после усиления в усилителе 25 переменного тока, преобразования в напряжение постоянного тока в первом фазовом демодуляторе 26 и усиления в усилителе 27 постоянного тока подается в компенсационную катушку 3 датчика момента по первой измерительной оси ДУС. При взаимодействии создаваемого при прохождении через компенсационную катушку 3 тока с магнитным полем постоянных магнитов 13, 14 создается действующий на ротор 12 момент, который возвращает ротор 12 в начальное положение, устраняя тем самым разбаланс мостовой схемы датчика угла. Протекающим через компенсационную катушку 3 током на эталонном резисторе Rэ создается падение напряжения, являющееся мерой измеряемой угловой скорости по первой измерительной оси ДУС.
Изменение параметров элементов мостовой схемы датчика угла вызывает разбаланс мостовой схемы датчика угла. При появлении разбаланса мостовой схемы датчика угла следящая система измерения угловой скорости устраняет разбаланс, и происходит изменение углового положения ротора 12 ДНГ относительно корпуса 1, что является причиной появления сигнала дрейфа в выходном сигнале датчика угловой скорости.
При устранении рассогласования мостовой схемы происходит изменение напряжений на обмотках 21, 23 сердечников датчика угла. Данное обстоятельство служит основой для устранения дрейфа сигнала датчика угловой скорости. Для этого производится сравнение напряжения на обмотке 21 датчика угла и выходного напряжения источника питания 24 переменного тока.
При подсоединении выводов обмотки 21 к прямому и инверсному входам второго дифференциального усилителя 29 на его выходе образуется напряжение, пропорциональное напряжению на обмотке 21.
При подключении выводов источника питания 24 переменного тока к прямому и инверсному входам первого дифференциального усилителя 28 на его выходе образуется напряжение, пропорциональное выходному напряжению источника питания 24 переменного тока с коэффициентом, равным отношению напряжения на обмотке 21 к выходному напряжению источника питания 24 переменного тока.
При номинальном напряжении на выходе источника питания 24 переменного тока напряжение на выходе первого дифференциального усилителя 28 равно выходному напряжению второго дифференциального усилителя 29, так как коэффициент усиления первого дифференциального усилителя 28 равен коэффициенту усиления второго дифференциального усилителя 29, умноженному на отношение напряжения на обмотке 21 к выходному напряжению источника питания 24 переменного тока. В результате на выходе "а" третьего дифференциального усилителя 30 напряжение равно нулю.
При изменении выходного напряжения источника питания 24 переменного тока изменение выходного напряжения первого дифференциального усилителя 28 равно изменению напряжения на выходе второго дифференциального усилителя 29. Таким образом, и в этом случае напряжение на выходе первого дифференциального усилителя 28 равно выходному напряжению второго дифференциального усилителя 29, выходное напряжение третьего дифференциального усилителя 30 равно нулю.
Если произошло изменение напряжения на обмотке 21 вследствие изменения параметров элементов мостовой схемы датчика угла и нет изменения выходного напряжения источника питания 24 переменного тока, то выходное напряжение третьего дифференциального усилителя 30 равно изменению напряжения на обмотке 21 вследствие изменения параметров элементов мостовой схемы датчика угла.
При изменении напряжения на обмотке 21 вследствие изменения параметров элементов мостовой схемы датчика угла и при изменении выходного напряжения источника питания 24 переменного тока выходное напряжение третьего дифференциального усилителя 30 будет равно изменению напряжения на обмотке 21 вследствие изменения параметров элементов мостовой схемы датчика угла.
Таким образом, выходное напряжение третьего дифференциального усилителя 30 будет равно только изменению напряжения на обмотке 21 вследствие изменения параметров элементов мостовой схемы датчика угла независимо от того, есть ли или нет изменение выходного напряжения источника питания 24 переменного тока.
Если известна зависимость между изменением напряжения на обмотке 21 датчика угла, вызванным изменением параметров элементов мостовой схемы датчика угла, и дрейфом датчика угловой скорости по его измерительной оси, то можно корректировать сигнал датчика угловой скорости с целью исключения из него сигнала дрейфа.
Корректировка выходного сигнала датчика угловой скорости может быть выполнена разными способами. Например, путем алгоритмической компенсации выходного сигнала датчика угловой скорости в устройстве, воспринимающем выходной сигнал датчика угловой скорости, используя выходное напряжение третьего дифференциального усилителя 30. Или еще можно преобразовать в напряжение постоянного тока напряжение с выхода "а" третьего дифференциального усилителя 30 и подать это напряжение на вход одного из каскадов усилителя 27 постоянного тока, выполненного, например, как дифференциальный усилитель.
При такой корректировке выходного сигнала датчика угловой скорости устраняется дрейф его выходного сигнала, в результате чего повышается точность измерения угловой скорости посредством датчика угловой скорости.
Источники информации
1. Гироскопические системы./ Под редакцией Д.С.Пельпора. М.: "Высшая школа", 1986, стр.64-65.
2. Патент РФ №2298151, кл. G01C 19/02. Гироскоп. 2005 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов | 2024 |
|
RU2829634C1 |
| КАНАЛ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2548053C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ УМЕНЬШЕНИЯ ДРЕЙФА НУЛЕВОГО СИГНАЛА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2010 |
|
RU2426075C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |

Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям угловой скорости. Датчик угловой скорости (ДУС) содержит динамически настраиваемый гироскоп (ДНГ) с датчиком угла и момента, источник питания переменного тока, усилитель переменного тока, фазовый демодулятор и усилитель постоянного тока по каждой измерительной оси ДУС. Каждый из датчиков угла выполнен по мостовой схеме, в которую входят два резистора и две обмотки, расположенные на сердечниках. В ДУС введены три дифференциальных усилителя (ДУ). К входам первого ДУ подключены выходы источника питания переменного тока, к входам второго ДУ подсоединены выводы одной из обмоток датчика угла. Выходы первого и второго ДУ подключены к входам третьего ДУ. Коэффициент усиления первого ДУ выполнен равным коэффициенту усиления второго ДУ, умноженному на отношение напряжение на обмотке к выходному напряжению источника питания переменного тока. Изобретение обеспечивает повышение точности измерения угловой скорости. 3 ил.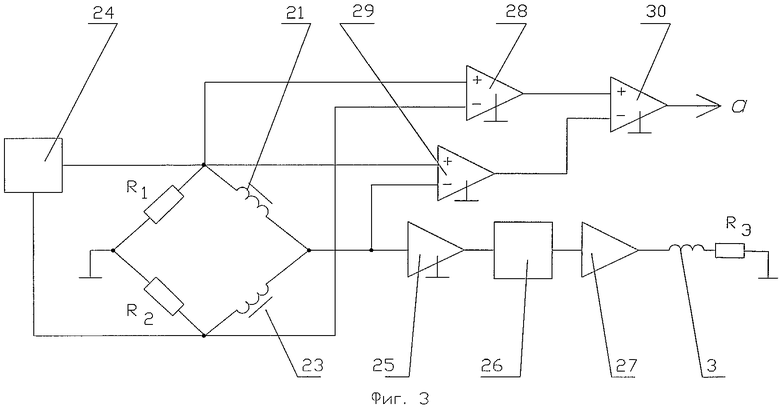
Датчик угловой скорости, содержащий динамически настраиваемый гироскоп (ДНГ) с датчиками угла и момента по каждой из двух измерительных осей датчика угловой скорости (ДУС), усилитель переменного тока, фазовый демодулятор и усилитель постоянного тока по каждой из двух измерительных осей ДУС, источник питания переменного тока, причем на роторе ДНГ установлены два кольцевых постоянных магнита, общих для датчиков момента по двум измерительным осям ДУС, датчик момента по каждой из измерительных осей ДУС содержит компенсационную катушку на корпусе ДНГ, датчик угла по каждой из измерительных осей ДУС выполнен по мостовой схеме и содержит установленные в корпусе первый и второй сердечники, на каждом из которых выполнена обмотка, два резистора, обмотки первого и второго сердечников соединены последовательно и подключены к источнику питания переменного тока, резисторы соединены последовательно и подсоединены к источнику питания переменного тока, по каждой измерительной оси ДУС точка соединения обмоток первого и второго сердечников подключена к входу усилителя переменного тока, к выходу усилителя постоянного тока подключена обмотка датчика момента, отличающийся тем, что по каждой из его измерительных осей введены первый, второй и третий дифференциальные усилители, один из выходов источника питания переменного тока подключен к прямому входу первого дифференциального усилителя, к инверсному входу которого подсоединен второй выход источника питания переменного тока, один из выводов обмотки на одном из сердечников датчика угла подсоединен к прямому входу второго дифференциального усилителя, к инверсному входу которого подключен второй вывод вышеуказанной обмотки, выход первого дифференциального усилителя подключен к прямому входу третьего дифференциального усилителя, инверсный вход которого соединен с выходом второго дифференциального усилителя, коэффициент усиления первого дифференциального усилителя установлен относительно коэффициента усиления второго дифференциального усилителя равным отношению напряжения на обмотке к выходному напряжению источника питания переменного тока.
| ГИРОСКОП | 2005 |
|
RU2298151C1 |
| ГИРОСКОПИЧЕСКИЕ СИСТЕМЫ/ Под редакцией Д.С.ПЕЛЬПОРА | |||
| - М.: Высшая школа, 1986, с.64-65 | |||
| ГИРОСКОП | 2001 |
|
RU2197715C1 |
| Устройство для измерения углов отклонения подвижного объекта | 1991 |
|
SU1810756A1 |
| JP 1297505 A, 30.11.1989. | |||

