Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов (манипуляторов).
Для одновременного переноса двух деталей используется двурукий робот или однорукий робот, оснащенный кистью с двумя схватами, каждый из которых содержит привод в виде силового цилиндра, рычажный передаточный механ зм, губки jj .
Однако данная кисть робота с двумя схватами сложна по конструкции, имеет сложную систему управления, трудна в эксплуатации.
Известен также схват промышленного робота, содержащий корпус и губки, связанные через рычажный механиз с силовым цилиндром 2 ,
Недостатком известного схвата является невозможность захватывать и переносить две детали.
Цель изобретения - расширение технологических и функциональных возможностей схвата при обеспечении простоты его конструкции и эксплуатации за счет одновременного переноса двух деталей. Одновременно с этим схват сохранил возможность при необход11мости манипулировать с одной деталью.
Поставленная цель достигается тем, что схват промышленного робота, содержащий корпус и губки, связанные через рычажный механизм с силовым цилиндром, снабжен гибкой пластиной ;И. дополнительной губкой с ynopajWH и датчиком, причем дополнительная Губка установлена на гибкой пластине, которая закреплена на корпусе между губка ш с возможностью колебаний в плоскости захвата деталей, при этом н.а каждой губке выполнены пазы, в которых с возможностью поворота вокруг их осей установлены дополнительно введенные подпружиненные упоры, взаимодействующие с упорами, установленными на дополнительной губке.
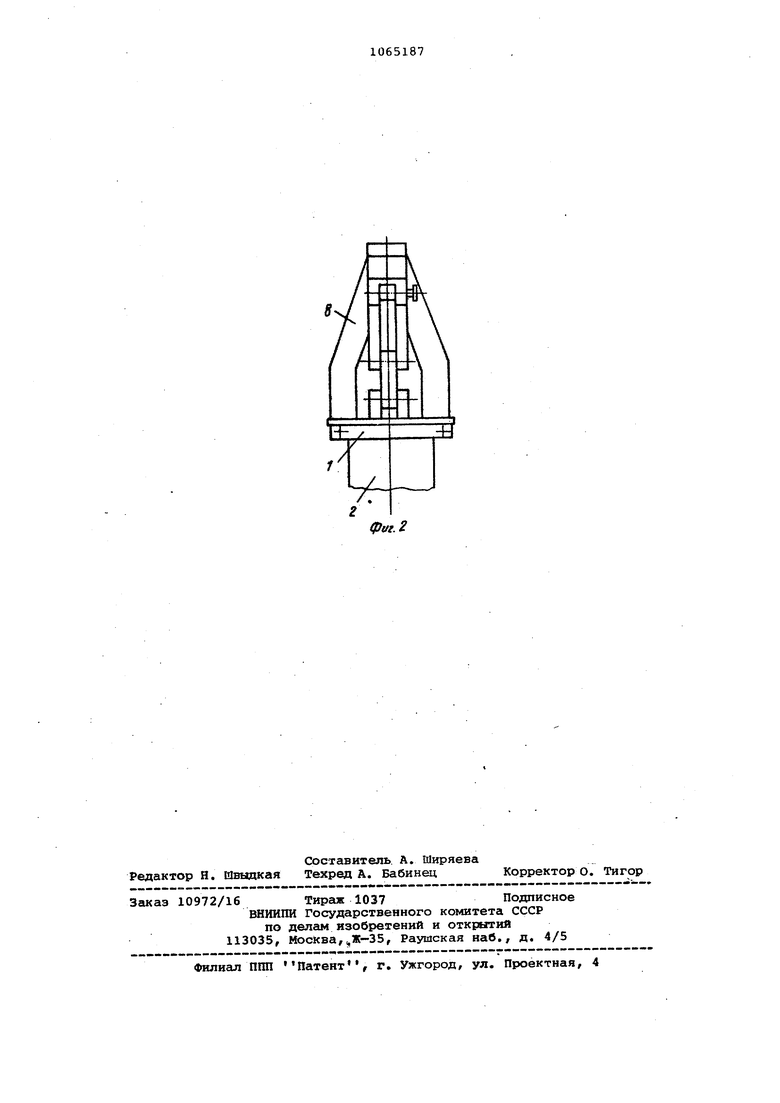
На фиг. 1 изображен схват, общий вид; на фиг. 2 - то же вид сбоку
Схват содержит корпус 1, привод В виде силового цилиндра 2, передаточный механизм 3, кинематически связанные со штоком 4 цилиндра 2, и губки 5 и 6. Между губками 5 и 6 установлена дополнительная губка 7, закрепленная на упругой пластине 8, соединенной с корпусом 1. Упругая
пластина 8 обеспечивает самоустановку дополнительной губки 7. В губках 5-7 выполнены пазы, в которых с возможностью поворота вокруг оси установлены подпружиненные упоры 9. На пластине 8 закреплены датчики 10 взаимодействующие с упорами 9 при установке в схват деталей.
Схват работает следующим образом
При контакте упоров 9 с захватываемыми деталями упоры 9 поворачиваются вокруг осей в пазах губок 57. Срабатывание силового цилиндра 2 через шток 4 и рычажный механизм 3 приводит к зажиму губок 5 и б. Детали оказываются зажатыми между губок 5 и 7, 6 и 7. Упоры 9 занимают положение в пазах губок 5 - 7 и, взаимодействуя с датчиком 10, дают сигнал в систему управления о наличии деталей в схвате. При отсутствии в одной или обеих частях схвата деталей замыкание усилия происходит через упоры 9, имитирующие деталь, а пластина 8, несущая дополнительную губку 7, самоустанавливается при колебании размеров деталей, предохраняя тем самым механизм схвата от поломок.
Схват может применяться для загрузки двухместного приспособления индукционной высокочастотной установки для закалки оси трактора. Вручную работа трудоемка, вес детали 9 кгс, охлаждение происходит в масляной вание с выделением вредных паров. Робот позволяет повысить производительность и культуру труда при при|Менении несложного конструктивно и IB эксплуатации схвата для одновремеи|иого захвата двух деталей. При валичии дополнительного места промежуточного базирования детали применение такого схвата позволяет автоматизировать процесс загрузки металлообрабатывающего оборудования и т.п. При необходимости данный схват может брать и манипулировать только одну деталь.
Преимуществом данного схвата является расширение функциональнЕлх возможностей при простоте конструкци схвата. При наличии кисти с двумя схватами приходится усложнять конструкцию наличием двух цилиндров, двух золотников для управления, трубопроводов,- электрооборудования и т.п. В эксплуатации такая кисть сложнее и менее надежна.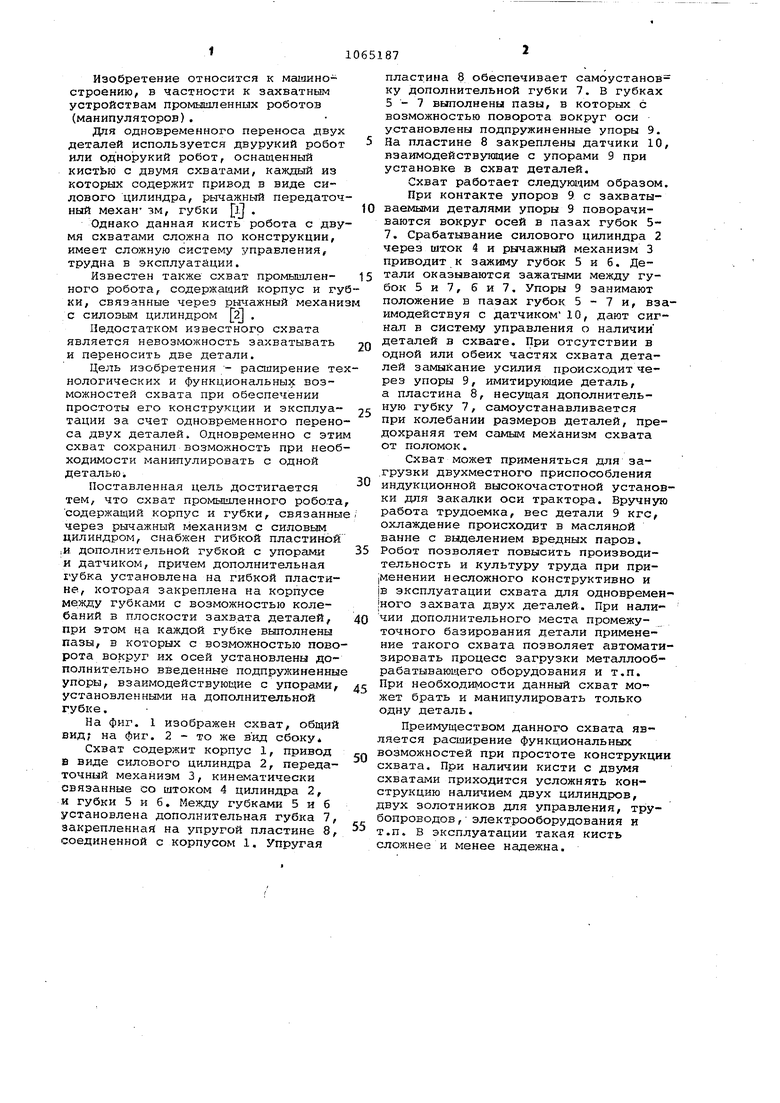
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Загрузочное устройство | 1980 |
|
SU929391A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |
| Гибкий производственный модуль | 1989 |
|
SU1754421A2 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Гибкий производственный модуль | 1988 |
|
SU1673395A1 |
СХВАТ ПРОМЬШШЕННОГО РОБОТА, Содержащий корпус и губки, связанные через рычажный механизм с силовым цилиндром, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения возможности захвата одновременно двух деталей, он снабжен гибкой пластиной и дополнительной губкой с упорами и датчиком, причем дополнительная губка установлена на гибкой пластине, которая закреплена на корпусе между губками с возможностью колебаний в плоскости захвата деталей, при этом на каждой губке выполнены пазы,- в которых с возможностью поворота вокруг их осей смонтированы дополнительно введенные упоры, взаимодействуквдие с упорами, установленными на дополнительной губке. (Л о: СП 00 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Белянин П.Н | |||
| Промышленные роботы М., Маииностроение, 1975, с | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, рис | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
