Настоящее изобретение относится к способам фильтрации параметров движения беспилотных летательных аппаратов (БПЛА), определяющих местоположение в пространстве с использованием корреляции данных от нескольких навигационных приборов.
Известен способ фильтрации параметров траектории объекта и устройство для него - патент RU №2307376 C1 (опубл. 2007 г.). Сущность этого способа в том, что уменьшение ошибки фильтрации параметров траектории сопровождаемых радиолокационных объектов происходит путем адаптации коэффициентов сглаживания фильтра к текущим условиям сопровождения объекта. Это позволяет сопровождать объекты в условиях, когда координаты объектов изменяются в общем случае по неизвестным нелинейным законам (например, при маневре объекта), а их измерения проводятся с постоянной или переменной дискретностью и разными неизвестными ошибками. Поскольку данный способ позволяет проводить фильтрацию параметров траектории сопровождаемого объекта только с радиолокационной станции, данный способ не пригоден для определения параметров движения БПЛА при размещении навигационной системы на борту.
Известен модифицированный фильтр Калмана, изложенный в патенте RU №2160496 C2 (опубл. 2000 г.), основанный на предварительном усреднении измерений путем использования блока вычисления оптимальных весовых коэффициентов.
Модификация фильтра Калмана усложняет алгоритмы оценивания параметров движения БПЛА, требует большого объема памяти и быстродействия бортовой вычислительной машины и не гарантирует возможность использования при произвольных неизвестных маневрах БПЛА.
Другим способом адаптивной фильтрации сигнала является способ, изложенный в патенте WO №2013036154 A1 (опубл. 2013 г.), основанный на фильтрации сигнала адаптивным фильтром Калмана, полоса пропускания которого подстраивается в соответствии с прямой оценкой параметра фильтруемого сигнала, характеризующего динамику изменения фильтруемого сигнала.
Сущность способа в том, что управление полосой пропускания фильтра Калмана осуществляется через значения весовых коэффициентов фильтра на основе прямой оценки интенсивности формирующего процесса при известной (измеренной) оценке спектральной плотности мощности аддитивного гауссовского белого шума наблюдения. При этом полоса пропускания адаптируемого фильтра Калмана в любой момент фильтрации оказывается близкой к оптимальной в широком диапазоне рабочих условий, что приводит к повышению точности фильтрации. Однако адаптивный фильтр Калмана работает только в тех случаях, когда возмущением наблюдаемых параметров полета является белый шум. Так же недостатком фильтра Калмана является то, что сходимость оценок зависит от того, насколько точно линейные уравнения описывают поведение реальной системы.
Известна нелинейная адаптивная система автоматического управления, изложенная в патенте RU №2267147 C1 (опубл. 2005 г.), решающая задачу автоматического управления (с погрешностью, асимптотически стремящейся к нулю) многомерного динамического объекта с неизвестным математическим описанием и произвольными возмущающими воздействиями при наличии нелинейных ограничений в виде совместимых равенств и неравенств на управляемые переменные, управляющие воздействия и траектории перехода объекта управления в требуемое состояние. Изобретение выполнено в виде адаптивной системы управления с самонастраивающимися ПИД-регуляторами и формирует оценки переменных состояния и управляющие воздействия с помощью модифицированных алгоритмов фильтра Калмана, в которых в качестве априорных моделей объекта управления и генератора управляющих воздействий используется авторегрессия скользящего среднего.
Модифицированные алгоритмы фильтра Калмана усложняют алгоритмы оценивания параметров движения БПЛА и работают только в тех случаях, когда возмущением наблюдаемых параметров полета является белый шум.
За наиболее близкий аналог заявляемого изобретения принят способ инерциально-спутниковой навигации летательных аппаратов (ЛА), описанный в патенте RU №2536768 С1 (опубл. 2013 г.), состоящий в том, что производится совместная обработка входных данных о положении ЛА, формируемых независимо инерциальными датчиками, вырабатывающими векторы угловой скорости и ускорения ЛА, барометрическим высотомером и спутниковым приемником глобальной навигационной спутниковой системы с известным альманахом спутников и определяемым в полете ЛА составом рабочего созвездия спутников. Во входной обработке формируют данные о положении ЛА инерциальным способом, вычисляя их на основе показаний инерциальных датчиков и баровысотомера, параллельно выделяют данные о положении ЛА, определяемые спутниковым способом в спутниковом приемнике. В выходной обработке на основе упомянутых оценок инерциального и спутникового способов выполняют оценку ошибок инерциального способа с помощью расширенного фильтра Калмана. Далее выполняют коррекцию ошибок инерциального способа во входной обработке и определяют уточненное положение ЛА в виде разности оценок положения ЛА, определенных инерциальным способом, и упомянутых оценок ошибок инерциального способа.
Основным недостатком данного способа является недостаточная точность определения параметров движения маневрирующего БПЛА, поскольку алгоритмы фильтра Калмана хорошо работают только в тех случаях, когда возмущением наблюдаемых параметров полета является белый шум и когда программа управления БПЛА заранее известна.
Перед заявляемым изобретением поставлена задача повышения точности определения параметров движения маневрирующего БПЛА, управление которого определяется в процессе полета при наличии погрешностей измерений параметров движения, статистические свойства которых не известны.
Решение поставленной задачи осуществляют путем фильтрации параметров движения БПЛА, поступающих с бортовой навигационной системы (БНС), с использованием метода минимаксной фильтрации, основанного на анализе информационных областей, и алгоритма минимаксной фильтрации, основанного на аппроксимации информационных областей параллелепипедами. Метод и алгоритм не требуют знания статистических характеристик ошибок измерений на выходе БНС и текущего управления БПЛА.
Так как при использовании навигационной системы на борту БПЛА ошибки измерений увеличиваются с увеличением времени измерений, то для увеличения точности фильтрации следует осуществлять периодическую коррекцию БНС с использованием спутниковой навигационной системы (СНС), при этом в дискретные моменты времени Ткорр, соответствующие периоду коррекции БНС от СНС, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС, а затем изменяются в соответствии с особенностями работы БНС до следующего момента коррекции. Моменты времени коррекции БНС от СНС Ткорр выбираются минимальными для обеспечения необходимой точности определения параметров движения маневрирующего БПЛА.
Достигаемый технический результат от реализации предлагаемого способа заключается в повышении точности определения параметров движения маневрирующего БПЛА, управление которого определяется в процессе полета при наличии погрешностей измерений параметров движения, статистические свойства которых не известны, за счет использования минимаксной фильтрации параметров движения на выходе БНС, при этом в дискретные моменты времени, соответствующие периоду коррекции БНС от СНС Ткорр, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС, а затем изменяются в соответствии с особенностями работы БНС БПЛА до следующего момента коррекции.
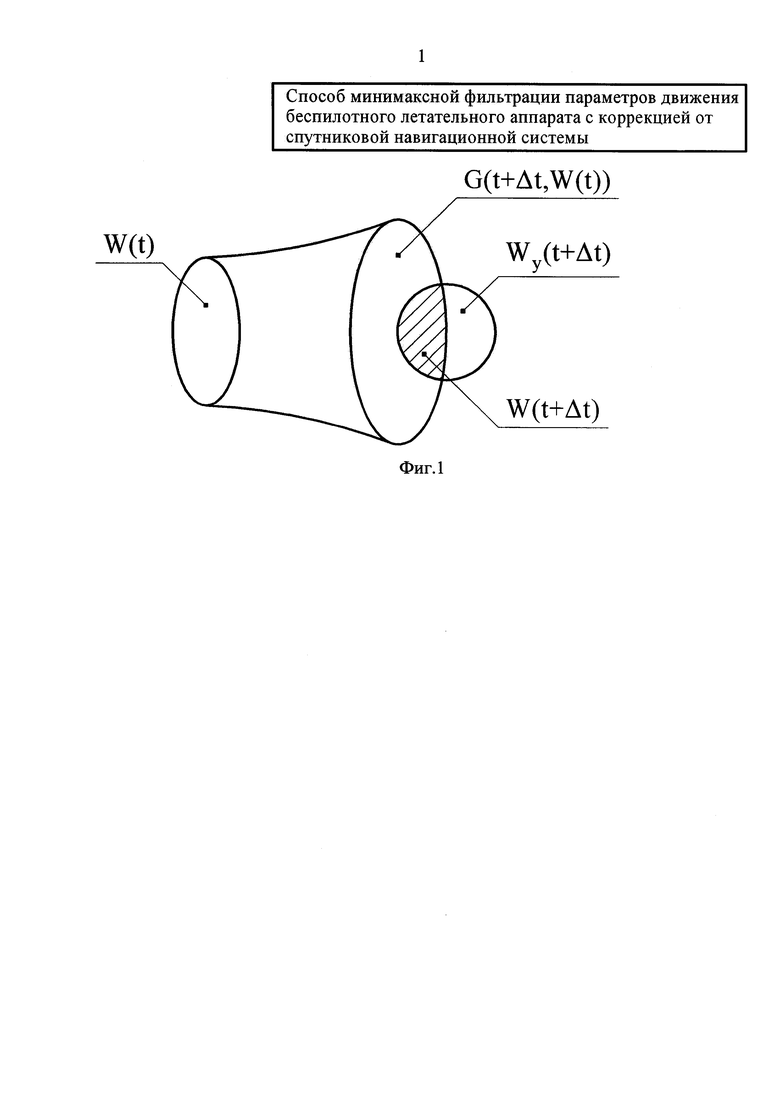
На фиг. 1 изображены информационные области и область достижимости (ОД) БПЛА.
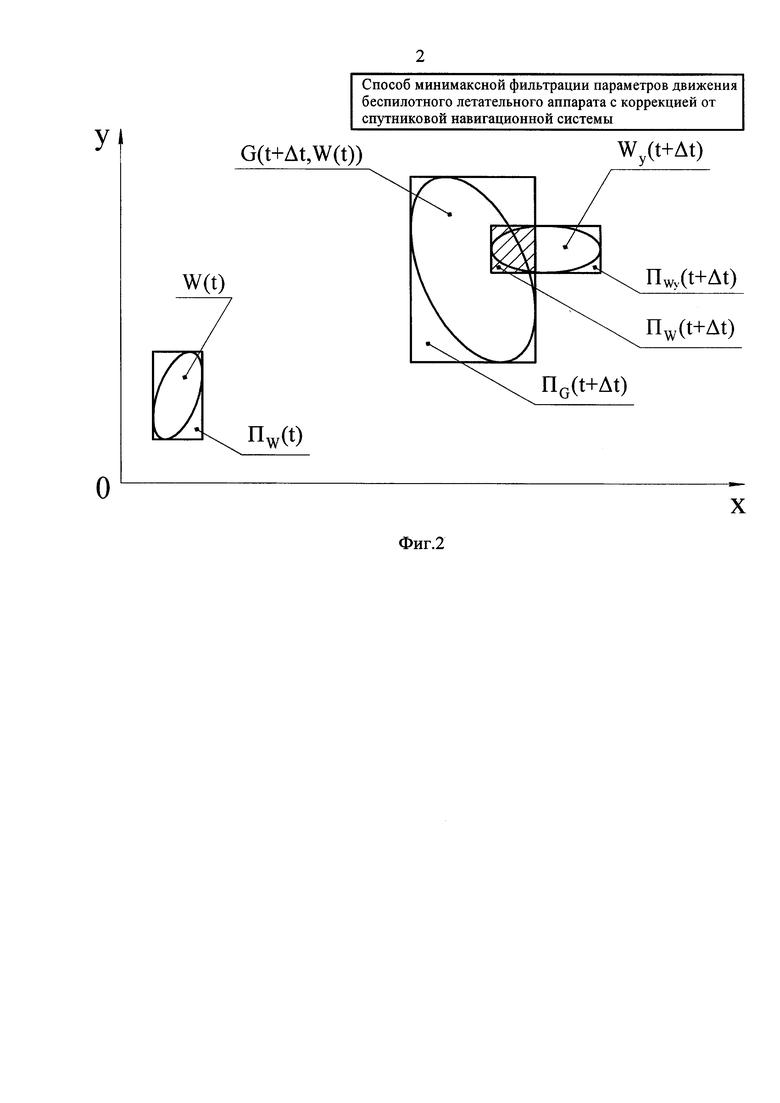
На фиг. 2 изображена аппроксимация информационных областей и ОД БПЛА параллелепипедами.
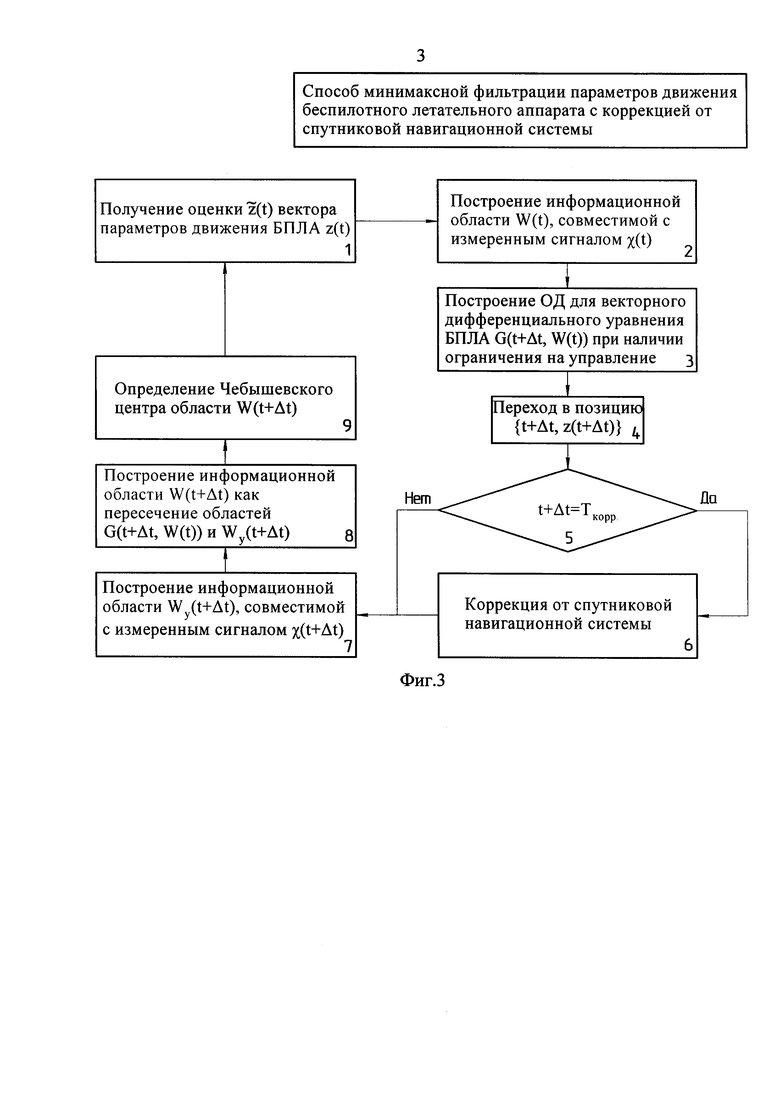
На фиг. 3 изображена блок-схема, поясняющая алгоритм минимаксной фильтрации параметров движения БПЛА с коррекцией от спутниковой навигационной системы.
Способ осуществляют следующим образом. При решении задачи минимаксной фильтрации с коррекцией от СНС параметры движения БПЛА определяются в дискретные моменты времени t0, t1=t0+Δt и т.д. до момента окончания движения, где Δt - шаг дискретизации.
При реализации метода минимаксной фильтрации сигнал на выходе БНС БПЛА задается в виде
χ(t)=z(t)+ξ(t),
где z(t) - вектор параметров движения БПЛА;
ξ(t) - вектор погрешностей измерений БНС.
Статистические свойства погрешностей измерений неизвестны, но они ограничены:
|ξ(t)|≤ξ.
Предполагается, что без коррекции БНС погрешности измерений возрастают с течением времени. Скорость возрастания погрешностей измерений зависит от типа используемой БНС.
Движение БПЛА определяется векторным дифференциальным уравнением:

где α(t) - неизвестное управление БПЛА, удовлетворяющее ограничению:

Предполагается, что вектор χ(t) получается в результате обработки первичной информации с использованием методов стохастической линейной фильтрации.
Метод минимаксной фильтрации с коррекцией от СНС состоит из следующих шагов.
Для БПЛА в позиции {t, z(t)} получена оценка  вектора параметров движения БПЛА z(t) (см. фиг. 3) 1. Строится информационная область W(t) (см. фиг. 1), совместимая с измеренным сигналом χ(t) (см. фиг. 3) 2.
вектора параметров движения БПЛА z(t) (см. фиг. 3) 1. Строится информационная область W(t) (см. фиг. 1), совместимая с измеренным сигналом χ(t) (см. фиг. 3) 2.
Строится ОД для системы (1) G(t+Δt,W(t)) к моменту времени t+Δt из области W(t) при наличии ограничений (2) (см. фиг. 3) 3.
Происходит переход БПЛА в позицию {t+Δt,z(t+Δt)} с управлением, определенным по оценке вектора параметров движения БПЛА и ограниченным (2) (см. фиг. 3) 4.
При минимаксной фильтрации параметров движения БПЛА на выходе БНС с коррекцией от СНС в дискретные моменты времени, соответствующие периоду коррекции БНС от СНС Ткорр (см. фиг. 3) 5, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС, а затем изменяются в соответствии с особенностями работы БНС БПЛА до следующего момента коррекции (см. фиг. 3) 6. Моменты времени коррекции БНС от СНС Ткорр выбираются минимальными для обеспечения необходимой точности определения параметров движения маневрирующего БПЛА.
Для момента времени t+Δt строится информационная область Wy(t+Δt), совместимая с измеренным сигналом χ(t+Δt) (см. фиг. 1), учитывающая возможный диапазон ошибок измерительного устройства (см. фиг. 3) 7.
Строится информационная область W(t+Δt) (см. фиг. 3) 8 как пересечение областей G(t+Δt,W(t)) и Wy(t+Δt) (см. фиг. 1).
Определяется оценка вектора  как Чебышевский центр области W(t+Δt) (см. фиг. 3) 9 и переходят к следующему шагу фильтрации и т.д. до момента окончания движения БПЛА.
как Чебышевский центр области W(t+Δt) (см. фиг. 3) 9 и переходят к следующему шагу фильтрации и т.д. до момента окончания движения БПЛА.
В общем случае построение ОД и информационных областей возможно только на основе их аппроксимации. Для аппроксимации информационные области и ОД помещаются в параллелепипеды ПW(t), ПG(t), размерности которых равны размерности фильтруемого вектора. На фиг. 2 представлен двухмерный случай.
В этом случае операция пересечения областей ПWy(t+Δt) и ПG(t+Δt) выполняется достаточно просто, в результате информационная область W(t+Δt) будет находиться в параллелепипеде ПW(t+Δt).
Алгоритм минимаксной фильтрации с коррекцией от СНС на основе аппроксимации информационных областей и ОД параллелепипедами состоит из следующих этапов:
- информационная область W(t) помещается в n-мерный параллелепипед ПW(t)=[z(t):βi(t)≤zi(t)≤γi(t), i=1, …n], где n - размерность вектора параметров движения БПЛА;
- вычисляется параллелепипед, который мажорирует ОД G(t+Δt, W(t)):
ПG(t+Δt)=[z(t+Δt):βiG(t+Δt)≤zi(t+Δt)≤γiG(t+Δt), i=1, …n];
- для определения границ параллелепипеда ОД рассчитываются βiG(t+Δt) и γiG(t+Δt) (Толпегин O.A., Теляков Р.Ф. Минимаксная фильтрация параметров движения спускаемого летательного аппарата. Сборник «Актуальные проблемы защиты и безопасности», том 1. Труды XVI Всероссийской научно-практической конференции - СПб: НПО «Специальных материалов», 2013, с. 437-442);
- по результатам измерения χ(t+Δt) определяется параллелепипед:
ПWy(t+Δt)=[z(t+Δt):βiχ(t+Δt)≤zi(t+Δt)≤γiχ(t+Δt), i=1, …n],
где γiχ(t+Δt), βiχ(t+Δt) задаются априорно, а в качестве центра используется вектор χi(t+Δt);
- если текущий момент времени t+Δt соответствует моменту коррекции БНС от СНС Tкорр, измеренные информационные области ПWy(t) скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС;
- определяется параллелепипед:
ПW(t+Δt)=[z(t+Δt):βi(t+Δt)≤zi(t+Δt)≤γi(t+Δt), i=1, …n],
где γi(t+Δt)=min[γiG(t+Δt), γiχ(t+Δt)];
βi(t+Δt)=max[βiG(t+Δt), βiχ(t+Δt)].
- по формулам  находятся составляющие вектора
находятся составляющие вектора  и переходят к следующему шагу фильтрации.
и переходят к следующему шагу фильтрации.
Заявленный способ работает следующим образом. Определяют оценку вектора параметров движения БПЛА в текущей позиции, строится информационная область, совместимая с измеренным сигналом БНС в текущей позиции. Строится ОД параметров движения БПЛА для следующей позиции из текущей информационной области при наличии ограничений на управление.
БПЛА совершает реальное движение из текущей позиции в новую позицию с управлением, определенным по оценке вектора параметров движения БПЛА. В новой позиции строится информационная область, совместимая с измеренным сигналом, учитывающая возможный диапазон ошибок измерительного устройства. Если новый момент времени соответствует моменту коррекции БНС от СНС, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС.
Строится информационная область как пересечение области достижимости и информационной области, учитывающей возможный диапазон ошибок измерительного устройства.
Определяется оценка вектора параметров движения БПЛА в новой позиции как Чебышевский центр информационной области. Происходит переход к следующему шагу фильтрации.
Таким образом, изобретение позволяет получить технический результат, а именно повысить точность определения параметров движения маневрирующего БПЛА, управление которого определяется в процессе полета при наличии погрешностей измерений параметров движения, статистические свойства которых не известны за счет использования минимаксной фильтрации параметров движения на выходе БНС, при этом в дискретные моменты времени, соответствующие периоду коррекции БНС от СНС Ткорр, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС, а затем изменяются в соответствии с особенностями работы БНС БПЛА до следующего момента коррекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
Изобретение относится к области авиационно-космического приборостроения устройств и систем фильтрации параметров движения беспилотных летательных аппаратов (БПЛА), определяющих местоположение в пространстве с использованием корреляции данных от нескольких навигационных приборов и может быть использовано для фильтрации параметров движения БПЛА, поступающих с бортовой навигационной системы (БНС) для повышения точности определения параметров движения БПЛА. Технический результат – повышение точности. Для этого процесс фильтрации параметров движения БПЛА происходит в дискретные моменты времени на основе обработки информации о текущем положении БПЛА, поступающей от БНС и спутниковой навигационной системы (СНС). Фильтрация параметров движения БПЛА в текущей позиции состоит из минимаксной фильтрации параметров движения, поступающих с БНС, и периодической коррекции БНС от СНС. Минимаксная фильтрация параметров движения БПЛА основана на расчете информационных областей, учитывающих возможный диапазон ошибок измерительного устройства и областей достижимости (ОД). На основе анализа взаимного положения информационных областей и ОД определяется оценка вектора параметров движения БПЛА, на основе которой определяется управление БПЛА для перехода в новую позицию. При периодической коррекции БНС от СНС в дискретные моменты времени, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС, а затем изменяются в соответствии с особенностями работы БНС до следующего момента коррекции. 3 ил.
Способ минимаксной фильтрации параметров движения беспилотного летательного аппарата (БПЛА) с коррекцией от спутниковой навигационной системы (СНС), состоящий из совместной обработки входных данных о положении БПЛА, формируемых независимо бортовой навигационной системой (БНС) и СНС, отличающийся тем, что для фильтрации параметров движения БПЛА, поступающих с БНС, используется метод минимаксной фильтрации и алгоритм минимаксной фильтрации, при этом в дискретные моменты времени, соответствующие периоду коррекции БНС от СНС Ткорр, измеренные информационные области скачком уменьшаются до минимальных размеров, определяемых точностью определения параметров движения СНС, а затем изменяются в соответствии с особенностями работы БНС БПЛА до следующего момента коррекции.
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| Адаптивное устройство для обработки данных | 1990 |
|
SU1741098A1 |
| Минимаксное проектирование фильтров Калмановского типа при наличии неопределенности параметров системы/Хачинсон Д | |||
| и др | |||
| - Ракетная техника и космонавтика, том 11 | |||
| Черноусько Ф.Л., Меликян А.А | |||
| Игровые задачи управления и поиска | |||
| М.: Наука, 1978, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |

