Изобретение относится к радиотехнике и может быть использовано в радиолокации при определении азимута цели с помощью интерполированной пеленгационной характеристики.
Широко известны методы измерения направления на цель с помощью моноимпульсных антенных систем, имеющих несколько выходов, соединенных с угловыми дискриминаторами различных типов (А.И. Леонов, К.И. Фомичев, Моноимпульсная радиолокация, Москва, Радио и Связь, 1984 г., с. 312).
Из уровня техники известен способ измерения азимута радиолокационных целей (патент на изобретение RU №2187826, опубликовано 20.08.2002 г., MTIK: G01S 7/28, G01S 13/06, G01S 13/42). Способ измерения азимута радиолокационных целей состоит в том, что задерживают сигнал "Север" на половину расчетной угловой ширины радиолокационного пакета. Измеряют азимут антенны радиолокационной станции кругового обзора относительно направления задержанного сигнала "Север". Находят центр пакета обнаруженной цели, которым считывают азимут радиолокационной цели. При этом между упомянутым измерением азимута антенны и считыванием азимута радиолокационной цели измеряют азимут зондирующего импульса, который отождествляют со значением азимута радиолокационной цели.
К недостаткам данного способа можно отнести недостаточную точность измерения азимута цели, обусловленную погрешностями величины радиолокационного пакета и ошибками считывания азимута.
Наиболее близким к предлагаемому способу является способ измерения азимута наземных целей с учетом отражений от подстилающей поверхности (патент на изобретение RU №2572843, опубликовано 20.01.2016 г., МПК: G01S 13/42), который выбран в качестве прототипа. Способ измерения азимута наземных целей с учетом отражений от подстилающей поверхности, в котором разрешающая способность по азимуту достигается за счет ширины диаграммы направленности при сканировании в азимутальной плоскости, а угловое положение антенны, при котором сигнал имеет максимальную амплитуду, принимают за азимут цели. Причем для определения азимута цели под малыми углами выделяют сигнал фоновой апертуры, для чего запоминают полную азимутальную последовательность сигналов за время одного обзора, далее осуществляют дискретное преобразование Фурье сигнала в область пространственных частот. Затем осуществляют фильтрацию по верхней частоте, после чего с помощью обратного быстрого преобразования Фурье сигнал переводят во временную область, далее обуженную диаграмму направленности, полученную выделением высокочастотной части азимутального сигнала, используют для определения азимута цели.
К недостаткам данного способа можно отнести значительное время, требующееся для измерения азимута, возникающее из-за необходимости получения для анализа полной азимутальной последовательности сигналов за время одного обзора.
Техническая проблема, решаемая созданием заявленного изобретения, заключается в необходимости максимально быстрого измерения азимута цели с приемлемой точностью.
Технический результат изобретения заключается в адаптации использования моноимпульсной антенной системы с целью повышения точности и скорости пеленгации цели при воздействии факторов, искажающих пеленгационную характеристику.
Технический результат достигается тем, что способ определения азимута цели с помощью интерполированной пеленгационной характеристики включает обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы. При этом он отличается от прототипа тем, что из обработки исключают сигналы, лежащие ниже уровня достоверности результатов, определяемого величиной шума приемного тракта. После чего через точки, лежащие справа и слева от приблизительного направления на цель, образованные совокупностью угловых положений моноимпульсной антенной системы и соответствующими им величинами сигналов с выхода суммарно-разностного дискриминатора, проводятся интерполированные кривые третьего порядка, включающие эти точки, азимут, соответствующий точке пересечения этих кривых, является вычисленным азимутом цели.
Сущность предлагаемого способа определения азимута цели с помощью интерполированной пеленгационной характеристики поясняется чертежами Фиг. 1 - Фиг. 3, на которых представлено следующее:
Фиг. 1 - пеленгационная характеристика;
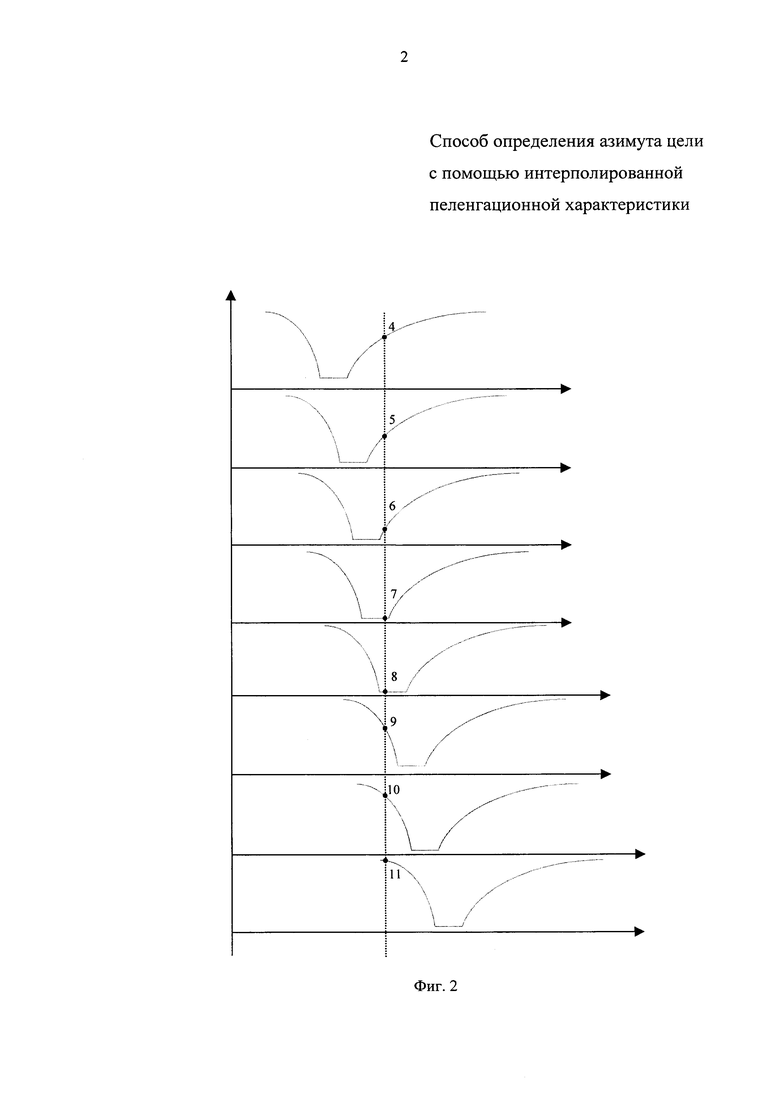
Фиг. 2 - результаты измерения азимута для разных точек на реальной пеленгационной характеристике;
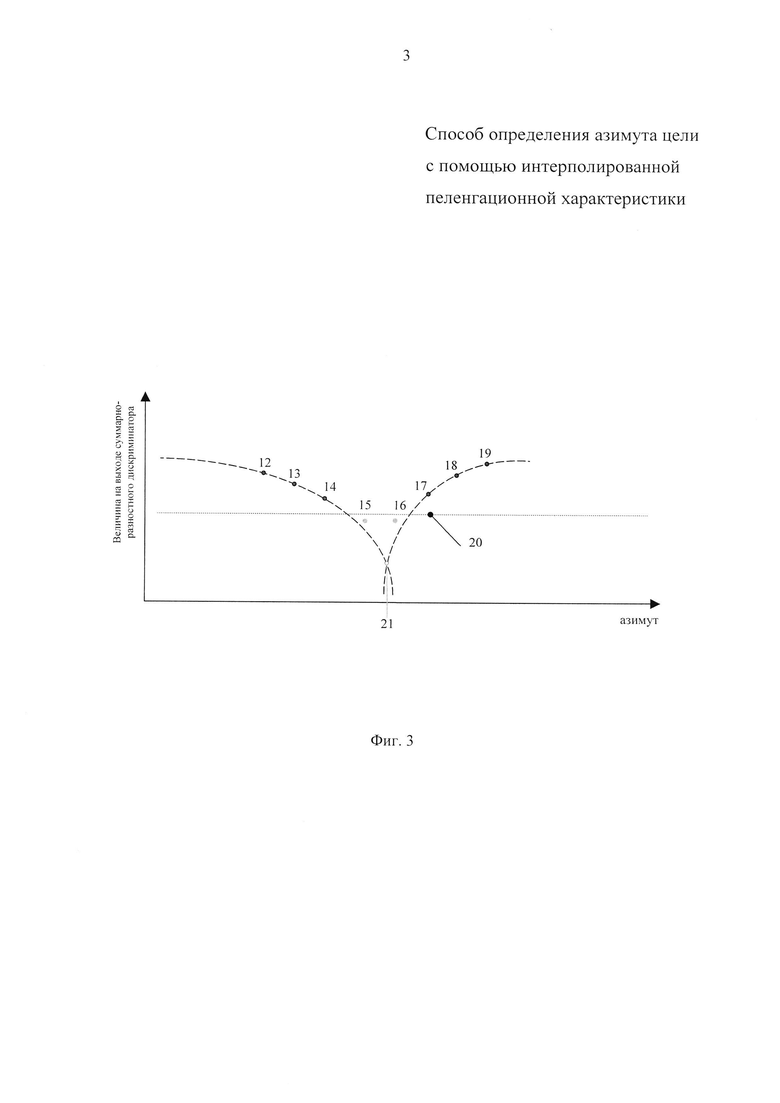
Фиг. 3 - пример восстановления формы пеленгационной характеристики по восьми ранее измеренным точкам на Фиг. 2.
Наиболее широко используются моноимпульсные антенные системы с суммарно-разностным дискриминатором, позволяющие пеленговать направление на цель за один цикл излучения или приема на основании измеренного соотношения сигналов с суммарного и разностного каналов антенной системы, вычисляемого суммарно-разностным дискриминатором, и априорно известной зависимости величины сигнала с выхода дискриминатора от величины отклонения направления на цель относительно направления установки диаграммы направленности антенны, называемой пеленгационной характеристикой. Однако на практике в реализации данного метода возникают трудности связанные с тем, что реальная пеленгационная характеристика может значительно отличаться от теоретической или заранее измеренной, например, за счет изменения глубины провала пеленгационной характеристики в направлении на цель, возникающего из-за рассогласования отдельных приемных каналов, или из-за ограничений, вызванных невозможностью точного измерения величины сигнала при малых соотношениях сигнал-шум, как показано на Фиг. 1.
Вместе с тем влияние перечисленных факторов на пеленгационную характеристику хотя и искажает ее форму, но весьма незначительно смещает ее минимум, соответствующий направлению на цель. Эту особенность можно использовать для более точной пеленгации цели, для чего производится ряд измерений величины сигнала на выходе суммарно-разностного дискриминатора для различных положений диаграммы направленности антенной системы, выбранных таким образом, чтобы требующее уточнения направление на цель оказалось приблизительно в центре. Таким образом, получаем ряд величин U1, U2, … Un (на Фиг. 2 проиллюстрировано проведение подобных измерений для n=8). Каждая из величин Ui представляет собой значение априорно неизвестной пеленгационной функции f(x), взятое для отклонения ΔАзi направления на цель (Азцели) от направления диаграммы направленности Азi. Для случая восьми отсчетов, приведенного на Фиг. 2 получаем:
Полученная система уравнений (1) описывает на плоскости кривую реальной пеленгационной функции f(x). На практике форма кривой f(x), направление на цель Азцели и конкретные значения отклонений ΔАзi нам неизвестны. Для их исключения из анализа преобразуем функцию f(x) путем зеркального отображения ее от вертикальной линии, проходящей через Азцели, тогда получаем:

Из анализа данных Фиг. 2 следует, что ΔAзi=Aзист-Aзi, тогда система (2) будет представлена в следующем виде:

Представленная система уравнений (3) описывает ряд точек на плоскости с координатами [Ui, Asi], лежащих на кривой, представляющей собой зеркальное отображение реальной пеленгационной кривой относительно азимута цели (Aзцели). Причем координаты [Ui, Азi] нам известны и их возможно построить на плоскости. Поскольку минимум реальной пеленгационной характеристики совпадает с азимутом цели (Азцели), то находят минимум зеркальной пеленгационной кривой, заданной этими точками, и определяют направление на цель. Для этого проводят интерполяцию имеющихся точек двумя отрезками кривой третьего порядка, как показано на Фиг. 3, предварительно исключив из рассмотрения точки, лежащие ниже уровня достоверности, определяемого шумом приемника.
Способ определения азимута цели с помощью интерполированной пеленгационной характеристики осуществляется следующим образом:
- заранее определяют, либо принимают от внешнего источника приблизительное направление на цель (азимут цели);
- в угловом секторе, центром которого является приблизительное направление на цель, производят измерение сигнала с выхода суммарно-разностного дискриминатора для ряда точек с определенным шагом;
- из дальнейшего анализа исключают точки, величина сигнала с выхода суммарно-разностного дискриминатора для которых лежит ниже уровня достоверности результатов, определяемого величиной шума приемного тракта;
- на условной плоскости по горизонтальной оси которой откладывают азимут, а по вертикальной оси - уровень сигнала с выхода суммарно-разностного дискриминатора, строят точки по следующему правилу: в качестве азимута берут положение диаграммы направленности антенны, для которого проводилось измерение, и для него устанавливают величину сигнала с выхода дискриминатора;
- через три ближайшие точки слева от приблизительного направления на цель проводят кривую третьего порядка;
- через три ближайшие точки справа от приблизительного направления на цель проводят кривую третьего порядка;
- азимут, соответствующий точке пересечения этих кривых, принимают за вычисленный азимут цели.
На Фиг. 1 представлен пример зависимости величины на выходе суммарно-разностного дискриминатора от азимута цели (пеленгационная характеристика). Причем линией 1 обозначена идеальная пеленгационная характеристика, линией 2 - уровень шумов приемного канала (предел чувствительности), а линией 3 - реальная пеленгационная характеристика аппаратуры, образованная в результате искажения идеальной характеристики.
На Фиг. 2 представлен пример получения восьми результатов измерения азимута для разных точек 4-11 на реальной пеленгационной характеристике, используемых для оценки ее формы.
На Фиг. 3 представлен пример восстановления формы пеленгационной характеристики по восьми ранее измеренным точкам 4-11, изображенным на Фиг. 2. Причем точки 12-19 являются результатами измерения величины на выходе суммарно-разностного дискриминатора в зависимости от азимута (соответствуют точкам 4-11 на Фиг. 2), точка 21 (точка пересечения двух кривых третьего порядка), соответствующая искомому азимуту, линия 20 является пороговым уровнем, зависящим от уровня ограничения чувствительности приемного тракта и отсекающим недостоверные измерения.
Таким образом, предлагаемый способ измерения азимута цели позволяет осуществить адаптацию использования моноимпульсной антенной системы с целью повышения точности и скорости пеленгации цели при воздействии факторов, искажающих пеленгационную характеристику.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения азимута цели с помощью линейно-аппроксимированной пеленгационной характеристики | 2020 |
|
RU2755801C1 |
| Способ определения координат целей с помощью аппроксимированной пеленгационной характеристики | 2021 |
|
RU2777849C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ | 2011 |
|
RU2455658C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| Способ повышения точности определения угла пеленга цели при сохранении взаимозаменяемости антенны в составе системы | 2019 |
|
RU2731879C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |

Изобретение относится к радиотехнике и может быть использовано в радиолокации при определении азимута цели с помощью интерполированной пеленгационной характеристики. Достигаемый технический результат заключается в адаптации использования моноимпульсной антенной системы с целью повышения точности пеленгации цели при воздействии факторов, искажающих пеленгационную характеристику. Результат достигается тем, что способ определения азимута цели с помощью интерполированной пеленгационной характеристики включает обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы, при этом из обработки исключают сигналы, лежащие ниже уровня достоверности результатов, определяемого величиной шума приемного тракта. После чего через точки, лежащие справа и слева от приблизительного направления на цель, образованные совокупностью угловых положений моноимпульсной антенной системы и соответствующими им величинами сигналов с выхода суммарно-разностного дискриминатора, проводятся интерполированные кривые третьего порядка, включающие эти точки, азимут, соответствующий точке пересечения этих кривых, является вычисленным азимутом цели. 3 ил.
Способ определения азимута цели с помощью интерполированной пеленгационной характеристики, включающий обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы, отличающийся тем, что из обработки исключают сигналы, лежащие ниже уровня достоверности результатов, определяемого величиной шума приемного тракта, после чего через точки, лежащие справа и слева от приблизительного направления на цель, образованные совокупностью угловых положений моноимпульсной антенной системы и соответствующими им величинами сигналов с выхода суммарно-разностного дискриминатора, проводятся интерполированные кривые третьего порядка, включающие эти точки, азимут, соответствующий точке пересечения этих кривых, является вычисленным азимутом цели.
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ИЗМЕРЕНИЯ АЗИМУТА НАЗЕМНЫХ ЦЕЛЕЙ С УЧЕТОМ ОТРАЖЕНИЙ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2014 |
|
RU2572843C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1997 |
|
RU2122218C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| JP 7311252 A, 28.11.1995 | |||
| KR 2016120467 A, 18.10.2016 | |||
| СПОСОБ "ПРОТОЧНОГО" ДРЕНИРОВАНИЯ ЛИМФАТИЧЕСКОЙ СИСТЕМЫ ПРИ ПЕРИТОНИТЕ | 1995 |
|
RU2071357C1 |
| US 6061022 A, 09.05.2000. | |||

