Изобретение относится к активной радиолокации и может быть использовано в запросчиках радиолокационной системы активного запроса-ответа, устанавливаемых на подвижные объекты-носители, работающих по целеуказаниям от внешних систем по объектам, оборудованным радиолокационными ответчиками.
Из уровня техники известен способ определения азимута цели с помощью интерполированной пеленгационной характеристики (патент RU №2631118, МПК G01S 13/44, опубл. 19.09.2017), который выбран в качестве прототипа для заявляемого изобретения. Данный способ включает обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы, при этом из обработки исключают сигналы, лежащие ниже уровня достоверности результатов, определяемого величиной шума приемного тракта, после чего через точки, лежащие справа и слева от приблизительного направления на цель, образованные совокупностью угловых положений моноимпульсной антенной системы и соответствующими им величинами сигналов с выхода суммарно-разностного дискриминатора, проводятся интерполированные кривые третьего порядка, включающие эти точки, азимут, соответствующий точке пересечения этих кривых, является вычисленным азимутом цели. Данный способ позволяет повысить точность пеленгации цели при воздействии факторов, искажающих пеленгационную характеристику.
К недостатку указанного способа можно отнести то, что используемый в нем метод интерполяции дает хорошие результаты внутри анализируемого интервала, а при выходе за его границы величина ошибки начинает резко возрастать. Поскольку искомое значение азимута, определяемое по данному методу, фактически находится за границами обоих интерполируемых интервалов, то оно может быть подвержено значительным ошибкам. Кроме того, сам принцип интерполяции предполагает обязательное прохождение кривой через все участвующие в ее построении точки. В рассматриваемом случае точками являются измеренные величины амплитуд сигналов с выхода суммарно-разностного дискриминатора, для каждой из которых существуют ошибки измерения, приводящие к искажению интерполяционной кривой и появлению дополнительных ошибок в определении азимута.
Для оптимизации определения азимута цели предлагается использовать качественно иные методы обработки, предусматривающие выделение общих закономерностей в принимаемых данных и построение на их основе полиномов, соответствующих данным последовательностям. Подобные методы аппроксимации широко известны и применяются при обработке данных, содержащих ошибки.
Техническая проблема, решаемая созданием данного изобретения, заключается в том, что при использовании указанного выше способа при определении азимута возникают ошибки, снижающие точность пеленгации цели.
Технический результат заявляемого изобретения направлен на повышение точности пеленгации цели за счет снижения влияния на пеленгационную характеристику искажающих ее факторов, таких как погрешность измерения амплитуды, ограничение чувствительности приемных каналов, пропуск (отсутствие) сигналов.
Указанный технический результат достигается тем, что способ определения азимута цели с помощью линейно-аппроксимированной пеленгационной характеристики включает обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы, при этом он отличается от прототипа тем, что последовательно проводится интерполяция отсутствующих данных, усреднение в скользящем окне полученной пеленгационной характеристики, вычисление двух интерполяционных прямых слева и справа от точки максимума пеленгационной характеристики, при этом азимут, соответствующий точке пересечения этих прямых, является вычисленным азимутом цели.
Сущность предлагаемого способа определения азимута цели с помощью линейно-аппроксимированной пеленгационной характеристики поясняется чертежами, на которых представлены:
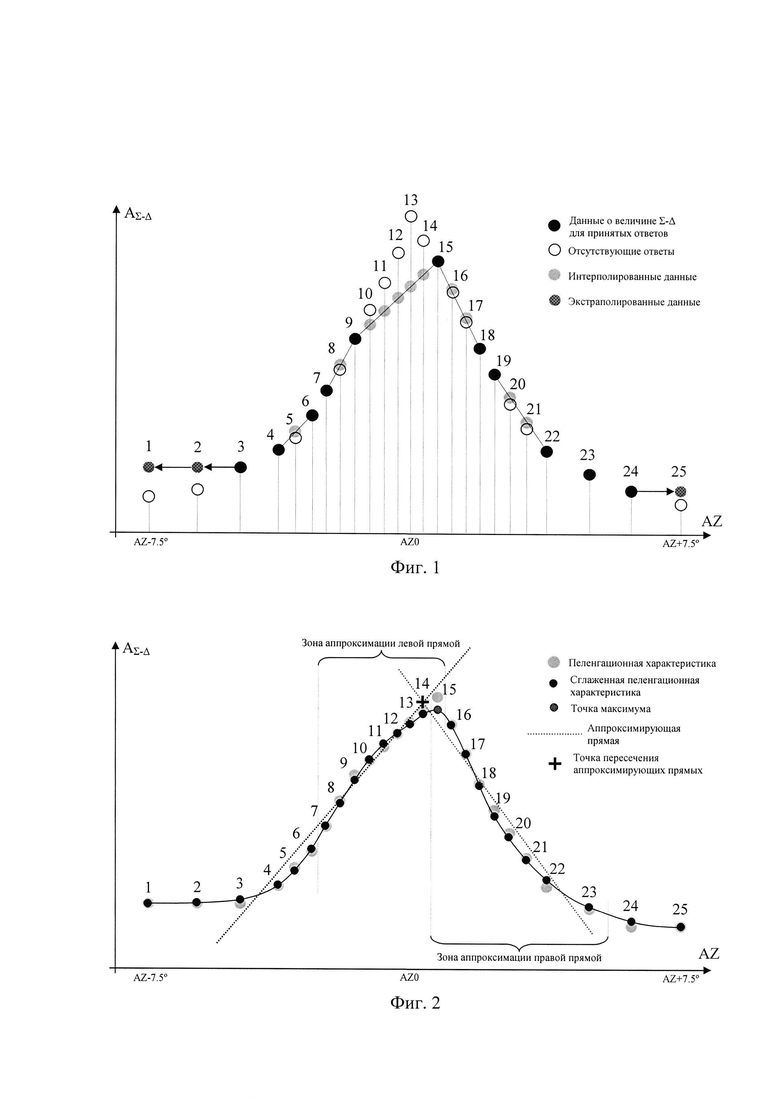
Фиг. 1 - пеленгационная характеристика, дополненная данными по отсутствующим ответам;
Фиг. 2 - пеленгационная характеристика, дополненная сглаженными данными и аппроксимирующими прямыми.
Измерение азимута отвечающего объекта посредством приема сигналов от моноимпульсной антенной системы производится по процедуре, включающей в себя следующие этапы:
- излучение пачки запросных сигналов с одновременным сканированием по азимуту;
- запоминание сохраненных значений разности амплитуд ответного сигнала с суммарного и разностного каналов для каждого запроса;
- интерполяция отсутствующих данных (восстановление данных в отсутствующих ответах);
- сглаживание полученной пеленгационной характеристики цели (усреднение в скользящем окне);
- поиск точки максимума пеленгационной характеристики цели;
- вычисление двух аппроксимирующих прямых (слева и справа от точки максимума);
- вычисление точки пересечения аппроксимирующих прямых;
- проверка достоверности измерения азимута цели.
Рассмотрим достижение технического результата более подробно.
Вычислительное устройство запросчика преобразует полученный азимут цели (AZ) в код отклонения диаграммы направленности выбранной антенны. Величина AZ выбирается как ближайшая к расчетному отклонению антенны с учетом шага установки диаграмм направленности (ДН) 0.5°, при спорных ситуациях выбирается наименьшее по модулю отклонение.
Запросчиком производится излучение пачки из 25 запросных сигналов с одновременным сканированием по азимуту.
К обработке принимаются ответные сигналы с любым соотношением амплитуд суммарного и разностного каналов, после чего они сохраняются в памяти вычислительного устройства. Если на какой-либо из запросов цель не ответила, то данные по разности амплитуд с суммарного и разностного каналов антенны (в дальнейшем Σ-Δ) для данного ответа считаются отсутствующими и подлежат интерполяции на следующем этапе обработки.
Отсутствующие данные по величине Σ-Δ восстанавливают следующим образом: для крайних точек справа и слева - по ближайшему значению, для всех остальных точек - методом линейной интерполяции, как показано на фиг. 1.
Полученная пеленгационная кривая (график, отображающий зависимость величин Σ-Δ от азимута, для которого они были получены) усредняется в скользящем окне размером 3 отсчета. Сглаживанию подлежат все отсчеты со 2 по 24, при этом отсчеты 1 и 25 остаются прежними, как показано на фиг. 2.
После сглаживания пеленгационной характеристики производится поиск точки максимума. При этом точкой максимума считается точка, имеющая наибольшую амплитуду.
На основании сглаженной пеленгационной характеристики и точки максимума производится расчет двух прямых, аппроксимирующих левый и правый склоны пеленгационной кривой (фиг. 2). Расчет ведется по девяти точкам справа и слева от максимума, включая максимум. Если от точки максимума до края характеристики менее 9 точек, то расчет ведется по всем доступным точкам с соответствующим уменьшением числа точек в приведенных ниже формулах.
Для каждой аппроксимирующей прямой вычисляются следующие промежуточные переменные:
Sx - сумма величин азимутов всех девяти точек;
Sy - сумма величин АΣ-Δ (разность амплитуд суммарного и разностного каналов моноимпульсной антенной системы) всех девяти точек;
Sx2 - сумма величин квадратов азимутов всех девяти точек;
Sxy - сумма величин произведения азимута (AZ) на АΣ-Δ для каждой из девяти точек.
Наклон А и смещение В для правой и левой аппроксимирующей прямой вычисляются по следующим формулам:

где N - число точек, по которым производится расчет.
На основании вычисленных параметров аппроксимирующих прямых вычисляется величина азимута, соответствующая точке их пересечения:

где AZcalc - величина азимута;
Вправ - смещение правой аппроксимирующей прямой;
Влев - смещение левой аппроксимирующей прямой;
Алев - наклон левой аппроксимирующей прямой;
Аправ - наклон правой аппроксимирующей прямой.
Азимут точки пересечения аппроксимирующих прямых является искомым (вычисленным) азимутом цели.
Достоверность измерения азимута проверяется по следующим условиям:
- знак произведения Алев и Аправ меньше ноля;
- справа и слева от точки максимума имеется не менее трех точек, для которых были получены ответы от цели (реальные данные о величине Σ-Δ).
Для каждой цели в точке принятия ответа, ближайшей к полученной точке пересечения аппроксимирующих прямых, проверяется выполнение условия Σ-D > 4дБ. Если условие не выполняется, то цель в результатах опознавания не выдается.
Вычислительное устройство запросчика пересчитывает координаты, включающие измеренный азимут в соответствии с пространственным положением цели, ориентацией носителя и выдает азимут с признаком его достоверности раздельно по каждой цели в результатах опознавания.
Таким образом, предлагаемый способ измерения азимута цели позволяет существенно повысить точность пеленгации цели за счет снижения влияния на пеленгационную характеристику искажающих ее факторов - погрешности измерения амплитуды, ограничения чувствительности приемных каналов, пропуска (отсутствия) сигналов.
Изобретение относится к активной радиолокации и может быть использовано в запросчиках радиолокационной системы активного запроса-ответа, устанавливаемых на подвижные объекты-носители, работающих по целеуказаниям от внешних систем по объектам, оборудованным радиолокационными ответчиками. Технический результат заявляемого изобретения направлен на повышение точности пеленгации цели за счет снижения влияния на пеленгационную характеристику искажающих ее факторов, таких как погрешность измерения амплитуды, ограничение чувствительности приемных каналов, пропуск (отсутствие) сигналов. Заявленный способ включает обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы. При этом последовательно проводится интерполяция отсутствующих данных, усреднение в скользящем окне полученной пеленгационной характеристики, вычисление двух интерполяционных прямых слева и справа от точки максимума пеленгационной характеристики. Азимут, соответствующий точке пересечения этих прямых, является вычисленным азимутом цели. 2 ил.
Способ определения азимута цели с помощью линейно-аппроксимированной пеленгационной характеристики, включающий обработку запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы, отличающийся тем, что последовательно проводится интерполяция отсутствующих данных, усреднение в скользящем окне полученной пеленгационной характеристики, вычисление двух аппроксимирующих прямых слева и справа от точки максимума пеленгационной характеристики, при этом азимут, соответствующий точке пересечения этих прямых, является вычисленным азимутом цели.
| Способ определения азимута цели с помощью интерполированной пеленгационной характеристики | 2016 |
|
RU2631118C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2711341C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ИЗМЕРЕНИЯ АЗИМУТА НАЗЕМНЫХ ЦЕЛЕЙ С УЧЕТОМ ОТРАЖЕНИЙ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2014 |
|
RU2572843C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ С КОМПЕНСАЦИЕЙ ПЕЛЕНГАЦИОННЫХ ОШИБОК СИСТЕМЫ АНТЕННА - ОБТЕКАТЕЛЬ | 2005 |
|
RU2284534C1 |
| СТОЛБОВОЙ В.С., ТУРКО Л.С., ЗАЛЕТИН П.В | |||
| Пеленгационная характеристика системы "Антенна - обтекатель" и пути повышения точности пеленгации радиолокационных объектов // Вестник Концерна ВКО Алмаз-Антей, 2016 г., N | |||

