Область техники, к которой относится изобретение
Настоящее изобретение относится к способу приведения в движение транспортного средства, в состав которого входит силовой агрегат, содержащий основной источник мощности, имеющий первую характеристическую кривую вращающего момента, и вспомогательный источник мощности, имеющий вторую характеристическую кривую вращающего момента, причем основной источник мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии с первой характеристической кривой вращающего момента, вспомогательный источник мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии со второй характеристической кривой вращающего момента, транспортное средство приспособлено для приведения в движение с использованием одного из двух указанных источников мощности или обоих источников мощности, и силовой агрегат дополнительно характеризуется ограничивающей кривой (функцией), которая обеспечивает ограничение, когда это применимо, текущей величины (вращающего момента), задаваемой водителем транспортного средства, относительно первой и второй характеристических кривых вращающего момента в процессе приведения в движение транспортного средства. Настоящее изобретение также относится к транспортному средству, которое приспособлено для осуществления такого способа.
Уровень техники
В автомобильной промышленности одно из основных направлений развития связано с уменьшением расхода топлива и снижением выбросов вредных веществ транспортными средствами, особенно в грузовых транспортных средствах с двигателями внутреннего сгорания. Этот направление затрагивает также и легковые автомобили, автобусы и т.п. Указанные задачи могут решаться самыми разными способами. Один из подходов заключается в уменьшении общих размеров двигателя. Однако могут возникать ситуации, когда такой двигатель уменьшенных размеров не сможет обеспечить необходимый вращающий момент для приведения в движение транспортного средства. Это особенно актуально, если транспортное средство, такое как, например, коммерческий грузовой автомобиль или строительная машина, тяжело нагружено. В связи с уменьшением размеров двигателя может быть предусмотрен вспомогательный двигатель (или несколько таких двигателей), который приспособлен для использования вместе с основным двигателем, когда мощность, обеспечиваемая основным двигателем, недостаточна.
В одном из способов дополнения возможностей двигателя внутреннего сгорания уменьшенных размеров может использоваться вспомогательный источник мощности в сочетании с буферным устройством для хранения аккумулируемой энергии. Такие транспортные средства, в которых используется несколько источников мощности, указываются как гибридные транспортные средства. Одним из примеров вспомогательного источника мощности и буфера энергии является электрическая машина и блок аккумуляторных батарей. Когда транспортное средство содержит двигатель внутреннего сгорания вместе с электрической машиной и блоком аккумуляторных батарей, оно определяется как гибридное электрическое транспортное средство. Характеристики аккумуляторных батарей (эффективность, мощность и срок службы) постоянно улучшаются. Электрическая машина может работать как в качестве генератора, вырабатывающего энергию для накопления в блоке аккумуляторных батарей, когда возникают излишки энергии (например, на участках торможения), так и в качестве двигателя для передачи энергии от аккумуляторных батарей на ведущие колеса транспортного средства. Движение транспортного средства может обеспечиваться с использованием двигателя внутреннего сгорания и/или электрической машины. Двигатель внутреннего сгорания может работать на любом моторном топливе, имеющемся на рынке, хотя дизельное топливо - это наиболее распространенный вид топлива, используемый на таких транспортных средствах, как тяжелых грузовиках.
Электрическую машину часто конструируют для обеспечения хороших эксплуатационных характеристик при приведении в движение транспортного средства с использованием только электрической энергии, а также для обеспечения экономии топлива за счет высокой степени рекуперации энергии при торможении. При движении транспортного средства в гибридном режиме, то есть, при одновременной работе двигателя внутреннего сгорания и электрической машины, выходная мощность электрической машины соответственно ограничивается. Имеется несколько причин для ограничения мощности электрической машины при работе в таком режиме. Целесообразно ограничивать ускорение транспортного средства, так чтобы оно вело себя как негибридное транспортное средство, то есть, чтобы ускорение было не слишком интенсивным. Также целесообразно не использовать слишком большую электрическую мощность, чтобы продлить срок службы батареи. Также следует избегать перегрева электрической машины, который может происходить в противном случае.
Следует понимать, что гибридные транспортные средства могут быть также и других видов. Общий термин "гибридное транспортное средство" используют, когда для приведения в движение транспортного средства используется основной и вспомогательный источники мощности. В этом случае также необходим накопитель энергии или система хранения энергии. В качестве основного источника мощности может использоваться любой двигатель внутреннего сгорания, работающий на дизельном топливе, на бензине, на диметилэфире или ином подходящем топливе или смеси таких топлив. В качестве вспомогательного источника мощности может использоваться электрическая машина, маховик или гидравлический двигатель. Таким образом, гибридное транспортное средство может также указываться, соответственно, как механическое или гидравлическое гибридное транспортное средство. Накопитель энергии или система хранения энергии для электрической машины может быть блоком аккумуляторных батарей или конденсатором большой емкости, для маховика - это момент инерции, накопленный маховиком, и для гидравлического двигателя - это резервуар высокого давления.
Целью настоящего изобретения является дальнейшее улучшение возможностей приведения в движение гибридного транспортного средства.
Раскрытие изобретения
Эта и другие цели будут раскрыты далее в нижеприведенном неограничивающем описании.
В настоящем изобретении предлагается способ приведения в движение транспортного средства. В состав транспортного средства входит силовой агрегат, содержащий основной источник мощности, имеющий первую характеристическую кривую вращающего момента, и вспомогательный источник мощности, имеющий вторую характеристическую кривую вращающего момента. Основной источник мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии с первой характеристической кривой вращающего момента, и вспомогательный источник мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии со второй характеристической кривой вращающего момента. Транспортное устройство приспособлено для приведения в движение от основного и/или вспомогательного источников мощности. Работа силового агрегата дополнительно определяется ограничивающей кривой, которая обеспечивает ограничение, когда это применимо, текущей величины (вращающего момента), задаваемой водителем транспортного средства относительно первой и второй характеристических кривых вращающего момента в процессе приведения в движение транспортного средства. При приведении в движение транспортного средства с одновременным использованием основного и вспомогательного источников мощности способ включает:
определение текущей величины, задаваемой водителем;
определение текущего условия для адаптации тяги для транспортного средства;
корректировку ограничивающей кривой силового агрегата в соответствии с коэффициентом вращающего момента для адаптации тяги, определяемым текущим условием для адаптации тяги;
когда это применимо, ограничение текущей величины, задаваемой водителем, в соответствии со скорректированной ограничивающей кривой силового агрегата; и
передачу команды (запроса) в силовой агрегат на приведении в движение транспортного средства в соответствии с возможно ограниченной текущей величиной мощности, задаваемой водителем.
В предлагаемой способе приведения в движение транспортного средства корректируется мощность, которую может генерировать силовой агрегат, для приведения в движение транспортного средства таким образом, чтобы его тяга регулировалась соответствующим образом. При нормальных условиях движения мощность, необходимая для приведения в движение транспортного средства, может поддерживаться на "нормальном" или "стандартном" уровне с учетом экономии топлива, снижения выбросов вредных веществ и возможностей основного и вспомогательного источников мощности. Однако может быть целесообразно и желательно корректировать мощность, которая будет использоваться для приведения в движение транспортного средства, путем корректировки ограничивающей кривой силового агрегата. Таким образом, может быть обеспечен быстрый отклик транспортного средства на команды водителя, или же может использоваться дополнительная мощность. Может возникать также и противоположная ситуация, то есть, для приведения в движение транспортного средства обеспечивается более медленный отклик или меньшая мощность. Соответственно, может быть обеспечено более тонкое согласование работы основного и вспомогательного источников мощности. В этом случае может быть увеличен срок службы блоков аккумуляторных батарей или других аналогичных устройств, используемых в силовом агрегате.
Определение преобладающего условия для адаптации тяги является предпочтительным способом определения условий движения транспортного средства. Таким образом, тяга транспортного средства может быть адаптирована к преобладающим условиям, то есть, к преобладающей потребности в суммарной мощности для транспортного средства. Коэффициент вращающего момента для адаптации тяги является функцией преобладающего условия для адаптации тяги. Таким образом, мощность, необходимая для приведения в движение транспортного средства, может использоваться более эффективно. Соответственно, разные преобладающие условия движения могут определять разные коэффициенты вращающего момента для адаптации тяги или корректировку коэффициента вращающего момента для адаптации тяги, непрерывную или периодическую (что больше подходит).
В соответствии с одним из вариантов коэффициент вращающего момента для адаптации тяги представляет собой масштабирующий коэффициент, являющийся функцией преобладающего условия для адаптации тяги.
Это простой способ учета преобладающих условий для адаптации тяги и корректировки ограничивающей кривой силового агрегата.
В соответствии с одним из вариантов масштабирующий коэффициент представляет собой линейную функцию со ступенчатыми приращениями.
В соответствии с одним из вариантов стадия передачи команды в силовой агрегат на приведении в движение транспортного средства в соответствии с текущей величиной, задаваемой водителем, которая может быть ограничена вышеуказанным образом, включает преобразование этой возможно ограниченной текущей величины в заданное значение вращающего момента силового агрегата.
В соответствии с одним из вариантов способ включает дополнительно распределение вышеуказанного заданного вращающего момента силового агрегата между основным и вспомогательным источниками мощности.
В соответствии с одним из вариантов способ включает сброс ограничивающей кривой силового агрегата, когда действие преобладающего условия для адаптации тяги прекращается.
Чтобы минимизировать потребление энергии электрической машиной, которая может быть включена для работы во время действия преобладающего условия для адаптации тяги, ограничивающая кривая силового агрегата может быть сброшена, сразу же как только прекратится действие этого преобладающего условия. Таким образом, мощность силового агрегата используется наиболее эффективным образом. Этот режим может быть эффективен, когда изменение коэффициента вращающего момента для адаптации тяги носит прерывистый характер, например, ограничивается корректировкой ограничивающей кривой силового агрегата только в некоторые моменты времени, например, когда происходит некоторое событие.
В соответствии с одним из вариантов стадия обнаружения преобладающего условия для адаптации тяги включает обнаружение одного или нескольких следующих условий: определение того, что транспортное устройство находится на наклонном участке дороги, определение уровня загрузки транспортного средства и определение того, что транспортное средство отстает от запланированного графика или опережает его.
Эти условия могут потребовать использования дополнительной мощности для приведения в движение транспортного средства, и поэтому важно определить наличие какого-либо преобладающего условия, одного или в сочетании с другими условиями. Эта стадия может выполняться непрерывно в процессе использования транспортного средства. То есть, она может выполняться в процессе движения транспортного средства, и когда оно неподвижно. Эта стадия может также выполняться, когда основной и вспомогательный источники мощности кратковременно выключаются, например, при остановке транспортного средства, снабженного системой "старт/стоп". Типичная ситуация такого типа: пассажирский автобус, который останавливается на остановках для входа и выхода пассажиров или останавливается на красный свет светофора.
В соответствии с одним из вариантов стадия определения того, что транспортное средство находится на наклонном участке дороги, включает использование устройства измерения угла наклона, и в случае определения этим устройством нахождения транспортного средства на подъеме, определение того, что угол наклона равен заданной величине угла наклона или превышает его.
Такое устройство определения угла наклона может включать: датчик наклона, расположенный на транспортном средстве; навигационную систему транспортного средства, такую как глобальная система определения местонахождения (GPS), имеющую также доступ к информации о высотах; или же навигационную систему транспортного средства, такую как система GPS, приспособленную для записи информации о высотах на маршруте с целью использования этой информации при повторном прохождении маршрута.
В соответствии с одним из вариантов заданный угол наклона соответствует подъему по меньшей мере 7,5%, предпочтительно по меньшей мере 10% и более предпочтительно по меньшей мере 12,5%.
В соответствии с одним из вариантов стадия определения уровня загрузки транспортного средства включает использование устройства измерения веса и определение того, что вес полезного груза, определяемый этим устройством, равен заданному весу или превышает его.
Такое устройство измерения веса может включать датчики разных типов, расположенные на системе подвески транспортного средства или внутри нее, так что нагрузка на подвеску, создаваемая полезным грузом, может быть определена путем вычитания известного веса конструкции транспортного средства из общего веса, измеренного датчиками.
В соответствии с одним из вариантов заданная величина веса соответствует полезному грузу, равному 30%, предпочтительно 50% и более предпочтительно 70% от веса конструкции транспортного средства.
В настоящем изобретении также предлагается транспортное средство, в состав которого входит силовой агрегат, содержащий основной источник мощности, имеющий первую характеристическую кривую вращающего момента, и вспомогательный источник мощности, имеющий вторую характеристическую кривую вращающего момента. Основной источник мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии с первой кривой вращающего момента, и вспомогательный источник мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии со второй кривой вращающего момента. Транспортное устройство приспособлено для приведения в движение от основного и/или вспомогательного источников мощности. Работа силового агрегата дополнительно определяется ограничивающей кривой, которая обеспечивает ограничение, когда это возможно, величины мощности, задаваемой водителем транспортного средства, относительно первой и второй кривых вращающего момента в процессе приведения в движение транспортного средства. Транспортное устройство дополнительно приспособлено для осуществления вышеописанного способа. Такое транспортное средство обладает всеми достоинствами и преимуществами, указанными для вышеописанного способа.
В соответствии с одним из вариантов основной источник мощности представляет собой двигатель внутреннего сгорания.
В соответствии с одним из вариантов вспомогательный источник мощности представляет собой электрическую машину.
Краткое описание чертежей
Ниже приведено описание изобретения на примере неограничивающего варианта его осуществления со ссылками на прилагаемые чертежи, на которых показано:
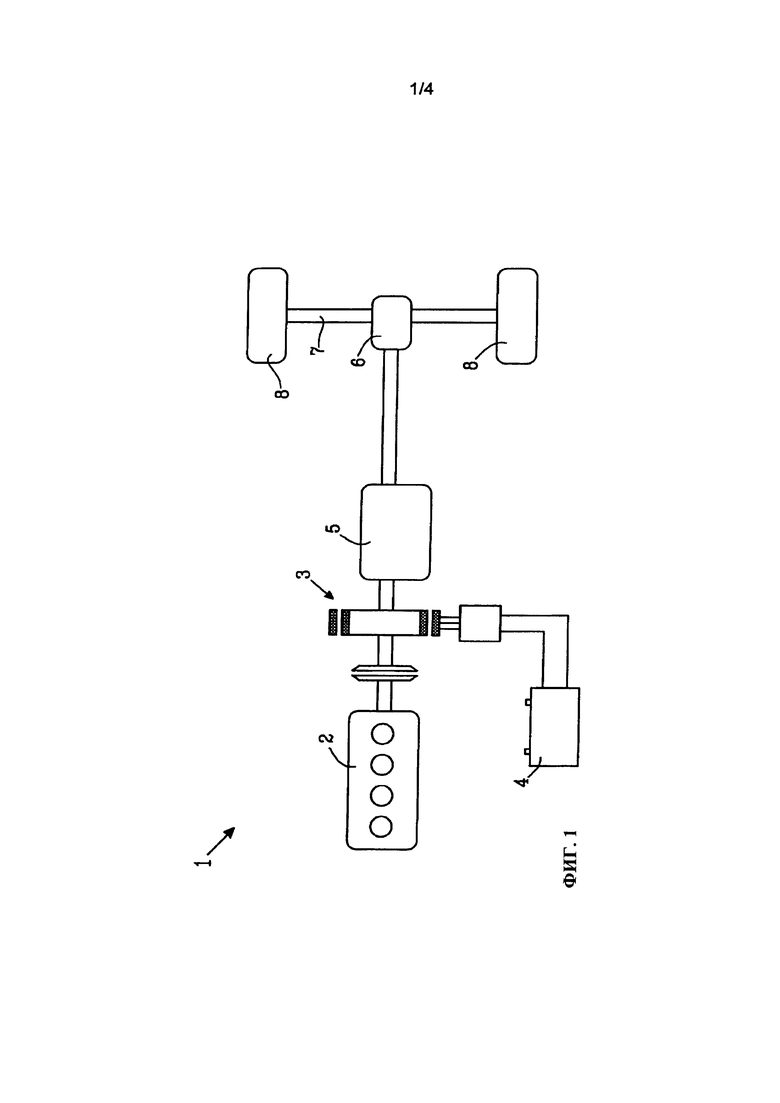
на фиг. 1 - схематический вид силового агрегата по одному из вариантов осуществления изобретения;
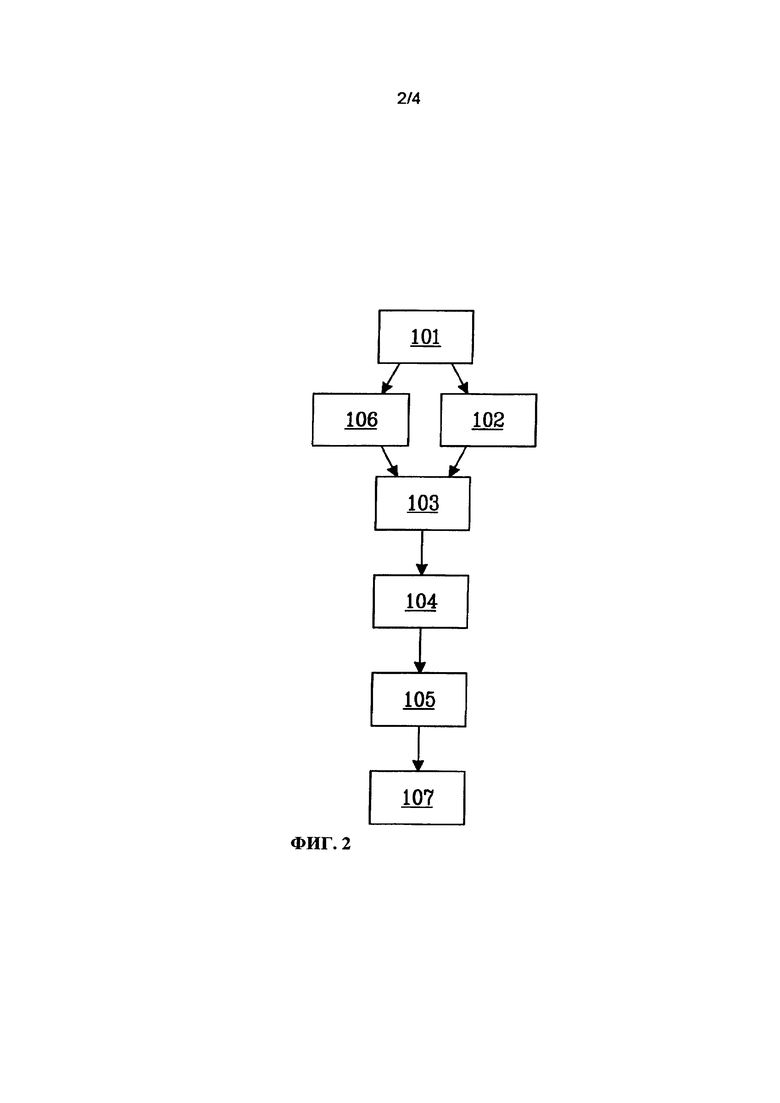
на фиг. 2 - блок-схема алгоритма осуществления способа по одному из вариантов осуществления изобретения;
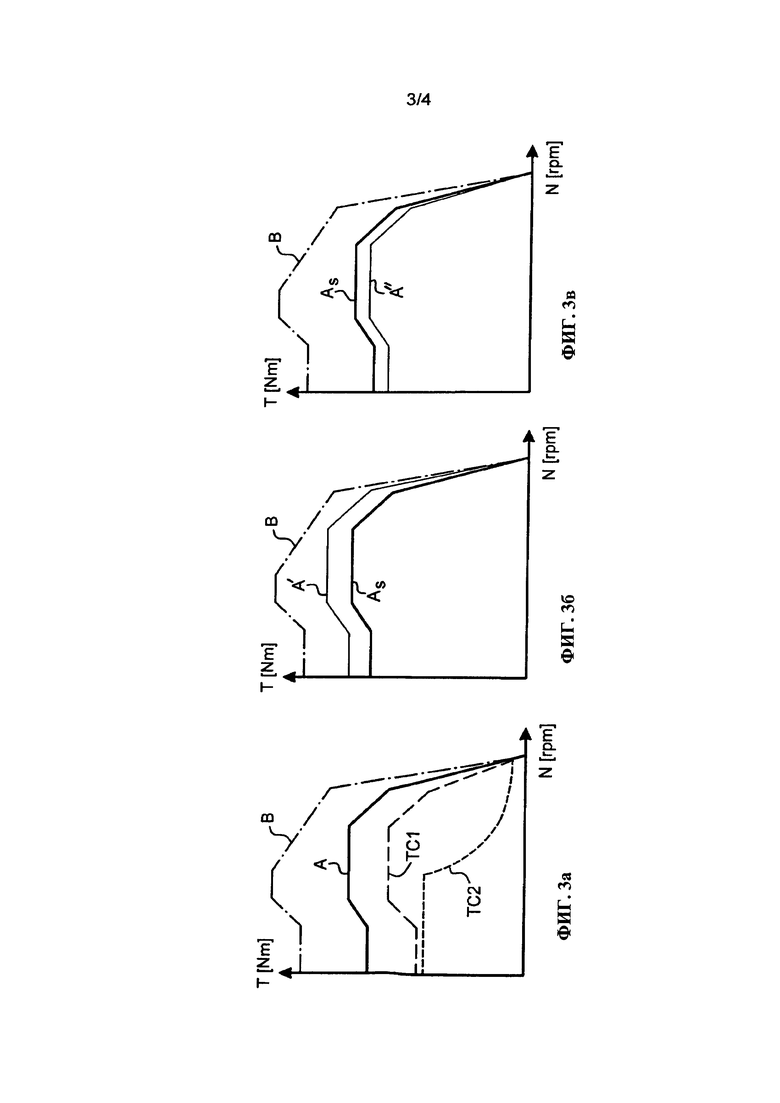
на фиг. 3а, 3б, 3в - графические характеристики вращающего момента по одному из вариантов осуществления изобретения;
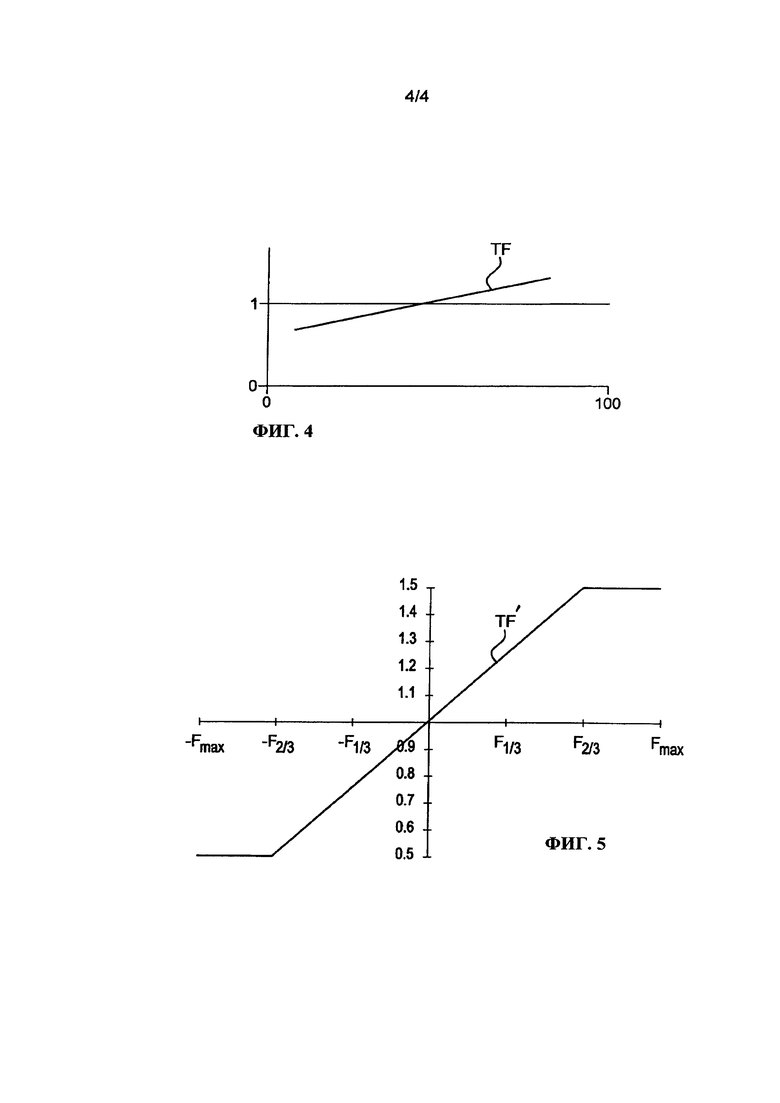
на фиг. 4 - график коэффициента вращающего момента для адаптации тяги по одному из вариантов осуществления изобретения;
на фиг. 5 - график коэффициента вращающего момента для адаптации тяги по другому варианту осуществления изобретения.
Осуществление изобретения
Ниже описывается сначала силовой агрегат транспортного средства, в котором используется настоящее изобретение, а далее раскрывается заявленный способ и соответствующая система.
Транспортное средство, подходящее для целей настоящего изобретения, может быть любым видом транспортного средства, движение которого осуществляется с использованием основного источника 2 мощности. Таким транспортным средством может быть, например, грузовой автомобиль, такой как грузовик большой грузоподъемности. Однако подходят и другие виды транспортных средств, такие как легкий грузовик, автобус или легковой автомобиль.
На фиг. 1 приведена схема примера силового агрегата 1 транспортного средства с основным источником 2 мощности, который подходит для осуществления заявленного способа. В одном из вариантов в качестве основного источника 2 мощности используется двигатель внутреннего сгорания. Двигатель 2 внутреннего сгорания - это обычно хорошо известный дизельный двигатель. Также возможно использование двигателей 2 внутреннего сгорания, работающих на других видах топлива, таких как бензин, природный газ или диметилэфир. Силовой агрегат 1 содержит также электрическую машину 3, снабженную аккумуляторной батареей 4 или блоком аккумуляторных батарей 4. Электрическая машина является одним из видов вспомогательного источника 3 мощности по настоящему изобретению. Одним из видов накопителя энергии или системы хранения энергии по настоящему изобретению является аккумуляторная батарея или блок аккумуляторных батарей. Транспортное средство приспособлено для приведения в движение с использованием только двигателя 2 внутреннего сгорания, только электрической машины 3 или обоих источников энергии движения. Такое транспортное средство часто указывают как гибридное электрическое транспортное средство.
Силовой агрегат 1 содержит также трансмиссию с коробкой 5 передач, обеспечивающей переключение передач для изменения скорости, так что скорость вращения или вращающий момент двигателя 2 внутреннего сгорания и электрической машины 3 может быть выбран в соответствии с условиями движения, и этот вращающий момент передается на ведущую ось 7 через дифференциал 6 и далее на ведущие колеса 8 транспортного средства. Изобретение описывается далее в отношении транспортного средства с приводом на два ведущих колеса, однако изобретение может использоваться и на транспортных средствах с несколькими ведущими осями. В общем случае комбинация первичного источника 2 мощности с вспомогательным источником 3 мощности в силовом агрегате 1 может отличаться от комбинации, схема которой приведена на фиг. 1. Такие комбинации известны, и изобретение может использоваться на транспортных средствах независимо от типа комбинации.
Двигатель 2 внутреннего сгорания имеет характеристическую кривую ТС1 вращающего момента, и электрическая машина 3 имеет характеристическую кривую ТС2 вращающего момента. Характеристическая кривая ТС1 вращающего момента является одним из вариантов характеристики первичного источника мощности, когда в качестве такого источника используется двигатель внутреннего сгорания. Характеристическая кривая ТС2 вращающего момента является одни из вариантов характеристики вспомогательного источника мощности, когда в качестве такого источника используется электрическая машина. Обычно характеристическая кривая вращающего момента (характеристика ТС1 двигателя внутреннего сгорания или характеристика ТС2 электрической машины в рассматриваемом варианте) представляет собой график, на котором показан максимальный вращающий момент, который может быть создан конкретным источником мощности на определенной скорости его вращения. На фиг. 3а, 3б, 3в приведены примеры таких графиков, которые далее будут описаны подробно. Величина вращающего момента (указана Т, в ньютонметрах, Nm) отложена по вертикальной оси графика, а скорость вращения (указана N, в оборотах в минуту, rpm) отложена по горизонтальной оси.
Способ по настоящему изобретению будет описан ниже подробно со ссылками на фиг. 2. Способ может осуществляться под управлением контроллера, который сам по себе известен и здесь не рассматривается. Контроллер может быть частью блока управления, уже установленного на транспортном средстве и предназначенного для управления подсоединением и отсоединением двигателя 2 внутреннего сгорания и электрической машины 3. В общем случае водитель транспортного средства не участвует в активации выполнения способа, то есть, способ выполняется в автоматическом режиме, как это будет описано.
В общем случае способ включает следующие стадии:
- определение текущей величины вращающего момента, задаваемой водителем (стадия 101);
- определение текущего условия для адаптации тяги для транспортного средства (стадия 102);
- корректировка ограничивающей кривой А силового агрегата в соответствии с коэффициентом TF вращающего момента для адаптации тяги в зависимости от текущего условия для адаптации тяги (стадия 103);
- когда это применимо, ограничение текущей величины вращающего момента, задаваемой водителем, в соответствии со скорректированной ограничивающей кривой силового агрегата (стадия 104);
- передача команды (запроса) в силовой агрегат 1 на приведение в движение транспортного средства в соответствии с, возможно, ограниченной текущей величиной вращающего момента, задаваемой водителем, путем преобразования этой ограниченной величины в заданное значение вращающего момента силового агрегата (стадия 105);
- распределение вышеуказанного заданного вращающего момента силового агрегата между основным источником 2 мощности и вспомогательным источником 3 мощности (стадия 107).
Способ осуществляется, когда транспортное средство движется в гибридном режиме, то есть, когда движение транспортного средства осуществляется с использованием двигателя 2 внутреннего сгорания и электрической машины 3. Момент заданный командой водителя, текущая величина вращающего момента, задаваемая водителем, в общем случае ограничивается ограничивающей кривой А силового агрегата, если эта текущая величина превышает предельное значение, определяемой ограничивающей кривой А на соответствующей скорости вращения. Это ограничение, если оно возникает, определяет заданный вращающий момент силового агрегата. Если текущая величина вращающего момента, задаваемая водителем, ниже значения, определяемого ограничивающей кривой А силового агрегата на соответствующей скорости вращения, ограничение не действует, и заданная величина вращающего момента равна величине, задаваемой водителем. Таким образом, ограничивающая кривая А силового агрегата, когда она применима, ограничивает вращающий момент, обеспечиваемый силовым агрегатом для приведения в движение транспортного средства (то есть, суммарную мощность, обеспечиваемую двигателем 2 внутреннего сгорания и электрической машиной 3). Затем заданная величина вращающего момента силового агрегата распределяется между двигателем 2 внутреннего сгорания и электрической машиной 3 с учетом характеристической кривой ТС1 вращающего момента двигателя внутреннего сгорания и характеристической кривой ТС2 вращающего момента электрической машины.
Ограничивающая кривая А силового агрегата в общем случае расположена ниже кривой, представляющей собой сумму характеристических кривых ТС1 и ТС2 вращающего момента. Сумма кривых ТС1 и ТС2 будет указываться далее как максимальная суммарная кривая В вращающего момента.
Обычный вариант осуществления изобретения включает работу двигателя 2 внутреннего сгорания в соответствии с его характеристической кривой ТС1 вращающего момента и работу электрической машины 3 с выходной мощностью, не превышающей максимально возможную выходную мощность, определяемую ее характеристической кривой ТС2 вращающего момента. Таким образом, ограничение вращающего момента, задаваемое ограничивающей кривой А, при нормальных условиях, обеспечивается посредством ограничения выходной мощности электрической машины 3. Причина такого решения заключается в том, что при приведении в движение транспортного средства в гибридном режиме общая выходная мощность, если ее не ограничивать, будет слишком высока относительно других транспортных средств, как это уже здесь указывалось, а ограничение выходной мощности электрической машины 3 проще реализовать. Однако было отмечено, что в транспортном средстве, снабженном основным источником 2 мощности и вспомогательным источником 3 мощности, ограничивающей кривой А силового агрегата может быть ограничена характеристическая кривая ТС1 вращающего момента и/или характеристическая кривая ТС2 вращающего момента.
Предлагаемый способ включает также определение на стадии 102 преобладающего условия для адаптации тяги для транспортного средства и корректировки ограничивающей кривой А силового агрегата в соответствии с коэффициентом TF вращающего момента для адаптации тяги, который зависит от преобладающего условия для адаптации тяги. Соответственно, преобладающие условия для транспортного средства учитываются при корректировке ограничивающей кривой А силового агрегата таким образом, чтобы водитель располагал большей или меньшей выходной мощностью для приведения в движение транспортного средства.
В соответствии с рассматриваемым вариантом коэффициент TF вращающего момента для адаптации тяги рассчитывается таким образом, чтобы в общем случае обеспечивать непрерывную корректировку ограничивающей кривой А в соответствии с преобладающим условием для адаптации тяги. В процессе движения транспортного средства преобладающие условия, такие как, например, наклон дороги или количество пассажиров в автобусе, которое определяет вес транспортного средства, изменяются непрерывно или время от времени. Для адаптации тяги к преобладающим условиям коэффициент TF вращающего момента для адаптации тяги в общем случае применяется непрерывно в процессе движения транспортного средства. Это также означает, что в общем случае осуществляется также непрерывное определение преобладающего условия для адаптации тяги, или же осуществляется такое определение в течение коротких временных интервалов, например, каждую секунду или каждые 10 секунд. Могут использоваться и более продолжительные временные интервалы. Контроллер может быть настроен, например, производителем для указанного определения с заданными временными интервалами.
В соответствии с другим вариантом характеристическая кривая ТС2 вращающего момента электрической машины сбрасывается к исходным величинам, когда преобладающее условие для адаптации тяги больше не применяется. Это означает, что корректировка ограничивающей кривой А силового агрегата, которая осуществлялась посредством коэффициента TF вращающего момента для адаптации тяги, отменяется. Предполагается, что продолжительность действия преобладающего условия для адаптации тяги по рассматриваемому варианту коротка по сравнению с общим временем движения транспортного средства, однако может быть и противоположная ситуация, например, когда транспортное средство доставляет большой груз. Поэтому, в соответствии с рассматриваемым вариантом коэффициент TF вращающего момента для адаптации тяги рассчитывается в прерывистом режиме.
Следует отметить, что в любом из рассмотренных вариантов корректировка ограничивающей кривой А силового агрегата может приводить к повышению величин кривой А, так что в этом случае не будет происходить ограничение текущей величины вращающего момента, задаваемой водителем. Это будет приводить к тому, что ограничивающая кривая А силового агрегата в этом конкретном случае будет совпадать с кривой В максимального суммарного вращающего момента. Также следует отметить, что в общем случае отсутствует теоретическая нижняя предельная величина для ограничивающей кривой А, хотя кажется непрактичным снижение мощности до нуля, поскольку в этом случае водитель не сможет осуществлять вождение транспортного средства.
Способ может выполняться как на неподвижном транспортном средстве, так и на транспортном средстве, находящемся в движении, то есть, приводимом в движение двигателем 2 внутреннего сгорания и электрической машиной 3.
Кривые, изображенные на фиг. 3а, будет описаны в направлении снизу вверх. Внизу приведена характеристическая кривая ТС2 вращающего момента электрической машины, которая в общем случае соответствует максимальным величинам вращающего момента, которые могут быть обеспечены электрической машиной 3. Дальше приведена характеристическая кривая ТС1 вращающего момента двигателя внутреннего сгорания, которая соответствует максимальным величинам вращающего момента, которые могут быть обеспечены двигателем 2 внутреннего сгорания. Далее приведена ограничивающая кривая А силового агрегата. В соответствии с настоящим изобретением ограничивающая кривая А силового агрегата может корректироваться, и поэтому она отличается от других кривых на фиг. 3а, которые являются фиксированными кривыми. В рассматриваемом варианте ограничивающая кривая А силового агрегата является кривой, которая находится ниже суммы характеристических кривых ТС1 и ТС2 вращающего момента. Вверху приведена кривая В максимальной суммы вращающих моментов. Эта кривая определяет максимальные величины вращающего момента, которые могут быть обеспечены совместным действием двигателя 2 внутреннего сгорания и электрической машины 3. Характеристическая кривая ТС 1 вращающего момента двигателя внутреннего сгорания, характеристическая кривая ТС2 вращающего момента электрической машины и ограничивающая кривая А силового агрегата могут иметь форму, которая полностью или частично отличается от формы кривых, показанных на фиг. 3а.
Как можно видеть на фиг. 3а, в соответствии с рассматриваемым вариантом ограничивающая кривая А силового агрегата, которая используется при приведении в движение транспортного средства, имеет такую же форму, что и характеристическая кривая ТС1 вращающего момента двигателя внутреннего сгорания. Также можно видеть, что форма кривой В максимальной суммы вращающих моментов отличается от формы характеристической кривой ТС1 вращающего момента двигателя внутреннего сгорания, начиная с конца горизонтального участка характеристической кривой ТС2 вращающего момента электрической машины.
На фиг. 3б и 3в показана только ограничивающая кривая А силового агрегата, которая используется для нормальных условий движения транспортного средства (поэтому указывается как стандартная ограничивающая кривая As) относительно кривой В максимальной суммы вращающих моментов. Стандартная ограничивающая кривая As силового агрегата может использоваться, когда не обнаруживаются какие-либо текущие условия для адаптации тяги. На фиг. 3б показана откорректированная ограничивающая кривая А' силового агрегата, которая проходит выше стандартной ограничивающей кривой As силового агрегата в соответствии с коэффициентом TF вращающего момента для адаптации тяги, который зависит от текущего условия для адаптации тяги. Однако откорректированная ограничивающая кривая А' силового агрегата проходит ниже кривой В максимальной суммы вращающих моментов. На фиг. 3в показана откорректированная ограничивающая кривая Аʺ силового агрегата, которая проходит ниже стандартной ограничивающей кривой As силового агрегата и, соответственно, ниже кривой В максимальной суммы вращающих моментов. Следует отметить, что ограничивающие кривые A, As, А' и Аʺ силового агрегата могут иметь другие формы и другое расположение относительно кривой В максимальной суммы вращающих моментов.
На фиг. 4 приведен один из вариантов коэффициента TF вращающего момента для адаптации тяги. В этом варианте коэффициент TF вращающего момента для адаптации тяги представлен примерно прямой линией и может быть указан также как масштабирующий коэффициент TF. Величины масштабирующего коэффициента TF откладываются по вертикальной оси, а по горизонтальной оси - нормализованная функция (индекс) преобладающего условия для адаптации тяги. Коэффициент TF вращающего момента для адаптации тяги, показанный на фиг. 4, является функцией уклона, когда транспортное средство находится на подъеме/спуске, и массы, в случае тяжелонагруженного транспортного средства. Масштабирующий коэффициент TF равен 1, когда транспортное средство движется по горизонтальной дороге, и его полезный груз определяется как "нормальный". В этом случае используется стандартная ограничивающая кривая As силового агрегата. При этом индекс равен 50, и коэффициент масштабирования равен 1. При увеличении индекса масштабирующий коэффициент TF становится больше 1, то есть, величины откорректированной ограничивающей кривой А' силового агрегата превышают величины стандартной кривой As, как это показано на фиг. 3б. При уменьшении индекса величины откорректированной кривой Аʺ силового агрегата меньше величин стандартной кривой As, как это показано на фиг. 3в. Таким образом, коэффициент TF вращающего момента для адаптации тяги является функцией преобладающего условия для адаптации тяги.
На фиг. 5 приведен другой вариант коэффициента TF' вращающего момента для адаптации тяги. В этом случае кривая коэффициента TF' имеет наклонную прямолинейную часть для некоторых уровней загрузки, и горизонтальные части для других уровней загрузки. Величины масштабирующего коэффициента TF' откладываются по вертикальной оси, а по горизонтальной оси - функция преобладающего условия для адаптации тяги, зависящая от уровня загрузки. Уровень загрузки, который может быть указан как "нормальный", находится в точке пересечения вертикальной и горизонтальной осей и соответствует масштабирующему коэффициенту, равному 1. Направо от вертикальной оси функция коэффициента TF' соответствует загрузке транспортного средства, превышающей "нормальную" загрузку, и при этом масштабирующий коэффициент TF' больше 1 и повышается до уровня загрузки, равного 2/3 ее максимальной величины. Далее масштабирующий коэффициент TF' имеет постоянную величину, равную 1,5. Аналогично, слева от вертикальной оси функция коэффициента TF' соответствует загрузке транспортного средства, меньшей "нормальной" загрузки, и при этом масштабирующий коэффициент TF' меньше 1 и понижается до уровня загрузки, равного 2/3 ее минимальной величины. Далее масштабирующий коэффициент TF' имеет постоянную величину, равную 0,5.
Необходимо отметить, что стандартная ограничивающая кривая As силового агрегата необязательно должна быть фиксированной кривой. Стандартная ограничивающая кривая As силового агрегата может быть функцией других преобладающих параметров (не скорости вращения), так что форма кривой может адаптироваться во время движения при "нормальных" условиях, то есть, когда отсутствуют преобладающие условия для адаптации. Такие другие параметры могут включать параметры двигателя. В этом случае стадия 103 корректировки ограничивающей кривой А силового агрегата в соответствии с предлагаемым способом предваряется стадией корректировки стандартной ограничивающей кривой As силового агрегата, или по меньшей мере сочетается с этой стадией, в соответствии с любым из таких дополнительных преобладающих параметров. Иначе говоря, при таких условиях движение транспортного средства осуществляется в соответствии со стандартной ограничивающей кривой As силового агрегата, пока на стадии 106 не будет определено, что имеются преобладающие параметры, требующие корректировки стандартной ограничивающей кривой As. Затем эта скорректированная стандартная ограничивающая кривая As силового агрегата также корректируется в зависимости от наличия каких-либо преобладающих условий для адаптации тяги. Соответственно, эти дополнительные преобладающие параметры отличны от преобладающих условий для адаптации тяги, как будет описано ниже. Таким образом, движение транспортного средства осуществляется с использованием скорректированной ограничивающей кривой А силового агрегата, причем корректировка выполняется по меньшей мере по двум причинам. Текущая величина вращающего момента, задаваемая водителем, ограничивается на стадии 104, когда это применимо, в соответствии с дважды скорректированной ограничивающей кривой А силового агрегата.
Примеры преобладающих условий для адаптации тяги включают любое одно из нижеприведенных условий, или их комбинацию: определение того, что транспортное устройство находится на наклонном участке дороги (подъем или спуск), определение уровня загрузки транспортного средства или определение на стадии 102 того, что транспортное средство запаздывает или опережает график движения.
Определение того, что транспортное средство находится на наклонном участке дороги, может осуществляться с использованием системы GPS в сочетании с картой или иной аналогичной базой данных, содержащей информацию о высотах, в результате чего определяется текущее положение транспортного средства и условия в месте его нахождения или перед ним. Географическая информация, получаемая средствами GPS, может включать информацию о рельефе, или же такую информацию можно получить в параллельной системе. Информация о рельефе может быть получена, например, путем прохождения конкретного маршрута и записи информации по нему на подходящем носителе, имеющемся на транспортном средстве. Система GPS - это лишь один вариант навигационной системы транспортного средства, и любая такая система, обеспечивающая информацию о местонахождении транспортного средства, подходит для осуществления предлагаемого способа.
Для определения того, что транспортное средство находится на наклонном участке дороги, может также использоваться датчик угла наклона. Такой датчик угла наклона представляет собой один из вариантов устройства определения наклона по одному из пунктов формулы изобретения. Датчик угла наклона в принципе может быть расположен в любом месте транспортного средства, однако предпочтительной является его часть, которая меньше всего раскачивается. Обычно это место находится возле средней точки транспортного средства, как в продольном, так и в поперечном направлениях.
Типичные подъемы, для которых может потребоваться дополнительная мощность от электрической машины 3, имеют наклон, превышающий 10%, в случае полностью загруженного городского автобуса массой 18 тонн, снабженного 8-литровым дизельным двигателем с турбонаддувом. Спуски, для которых используется пониженная мощность для приведения в движение транспортного средства, могут иметь любой наклон. Меньшая выходная мощность может вырабатываться для приведения в движение транспортного средства уже с небольших склонов, поскольку спуск может способствовать ускорению транспортного средства.
Определение уровня загрузки транспортного средства может быть осуществлено с помощью тензометрических датчиков, которые соединены непосредственно с подвеской колес и измеряют давление и соответственно сумму веса конструкции транспортного средства и его груза, то есть, общий вес нагруженного транспортного средства. Вес конструкции транспортного средства известен, и вычитая из измеренного общего веса транспортного средства вес его конструкции, можно получить вес полезного груза.
На транспортном средстве, снабженном воздушной подвеской, между его шасси и осями колес расположены воздушные амортизаторы. Давление в этих амортизаторах может быть измерено датчиками давления в качестве меры общего веса транспортного средства и, соответственно, полезной нагрузки. Этот способ прост, однако большая часть транспортных средств не имеет воздушной подвески. В случае листовых рессор или спиральных пружин, которые в настоящее время наиболее широко используются в качестве подвески, вместо тензометрических датчиков могут использоваться потенциометры или аналогичные датчики. Такие потенциометры являются простыми, дешевыми, и в то же время надежными датчиками, используемыми в качестве эффективных средств определения полезного груза.
Общий вес транспортного средства, включающий полезный груз, может быть вычислен по формуле второго закона Ньютона: сила равна массе, умноженной на ускорение. Скорость и ускорение транспортного средства уже измеряются другими средствами его системы управления. Наклон дороги может быть измерен датчиком угла наклона, как это уже указывалось. Движущая сила, передаваемая из силового агрегата на ведущие колеса, может быть известна из системы управления транспортным средством. Для осуществления рассматриваемого способа необходимо, чтобы транспортное средство находилось в движении. Для получения устойчивой величины вычисленного общего веса транспортного средства и, соответственно, полезного груза может потребоваться некоторое время. Рассматриваемый способ также может использоваться в качестве дополнения к другим известным способам определения полезной нагрузки.
Типичные полезные грузы транспортного средства могут составлять примерно 30% от веса его конструкции. Хотя полезный груз может составлять и 50 - 70%.
Определение того, транспортное средство опережает график или запаздывает, может быть осуществлено с помощью навигационной системы транспортного средства, такой как система GPS в сочетании с запоминающим устройством, для отслеживания запланированного графика прохождения маршрута. Этот график может быть снабжен информацией о нахождении транспортного средства в точках дорожных указателей по запланированному маршруту, или же это может быть более непрерывная информация по маршруту. Если транспортное средство отстает от запланированного графика прохождения маршрута или опережает его, то способ по настоящему изобретению может быть задействован для уменьшения или увеличения количества вырабатываемой энергии, так что транспортное средство может, например, ускорить свое прохождение маршрута, если оно отстает от графика.
Специалистам в данной области техники будет понятно, что различные изменения и модификации могут быть сделаны в вариантах, рассмотренных в настоящем описании, без выхода за пределы объема охраны, определяемого прилагаемой формулой изобретения. Различные варианты осуществления изобретения могут быть объединены в других способах, отличающихся от способов, раскрытых в описании. График коэффициента TF вращающего момента для адаптации тяги может иметь формы, отличающиеся от рассмотренных в настоящем описании, таких как прямая линия, например, он может быть непрерывным со ступеньками или монотонно возрастающим.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ ТЯГАЧА | 2021 |
|
RU2816600C2 |
| КОЛЕСНЫЙ ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ КОЛЕСНОГО ТЯГАЧА | 2020 |
|
RU2812028C2 |
| ТРАКТОР И СПОСОБ ЭКСПЛУАТАЦИИ ТРАКТОРА | 2021 |
|
RU2832217C2 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ О ВОЗМОЖНОМ СТОЛКНОВЕНИИ С ТРАНСПОРТНЫМ СРЕДСТВОМ, ДВИЖУЩИМСЯ ПО ВСТРЕЧНОЙ ПОЛОСЕ | 2015 |
|
RU2618863C1 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| Способ и система для регулирования впрыска воды | 2017 |
|
RU2685628C2 |
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2543434C2 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ТРОГАНИЯ С МЕСТА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2425766C2 |
| СПОСОБ РАБОТЫ КОМБИНИРОВАННОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1998 |
|
RU2223183C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЮБОЙ МЕСТНОСТИ, УПРАВЛЯЕМОЕ ПОСРЕДСТВОМ ЗАНОСА | 2008 |
|
RU2499716C2 |
Изобретение относится к транспортным средствам. Способ приведения в движение транспортного средства, имеющего силовой агрегат с основным и вспомогательным источниками мощности с первой и второй характеристическими кривыми вращающего момента соответственно, заключается в том, что при приведении в движение транспортного средства с одновременным использованием обоих источников мощности определяют текущую величину, задаваемую водителем, и определяют текущие условия для адаптации тяги для транспортного средства. Затем корректируют ограничивающую кривую силового агрегата в соответствии с коэффициентом вращающего момента для адаптации тяги в зависимости от текущего условия для адаптации тяги. Далее ограничивают текущую величину, задаваемую водителем, в соответствии со скорректированной ограничивающей кривой силового агрегата. Передают команды в силовой агрегат на приведение в движение транспортного средства в соответствии с, возможно, ограниченной текущей величиной, задаваемой водителем. Снижается расход топлива. 2 н. и 13 з.п. ф-лы, 5 ил.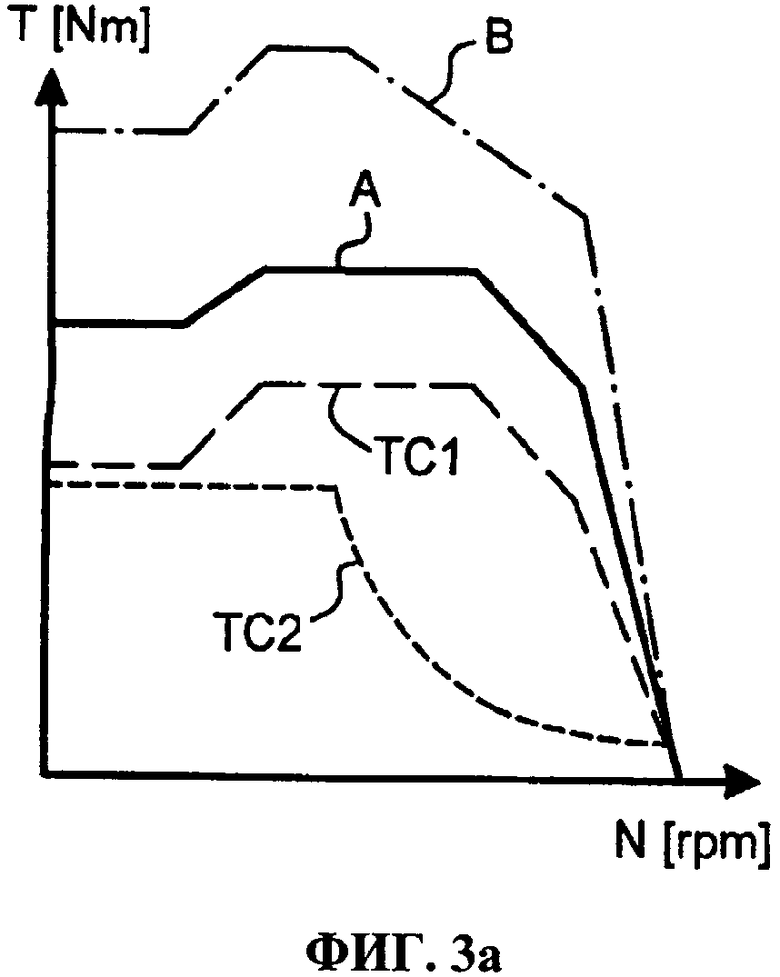
1. Способ приведения в движение транспортного средства, имеющего силовой агрегат, содержащий основной источник (2) мощности с первой характеристической кривой (ТС1) вращающего момента, и вспомогательный источник (3) мощности со второй характеристической кривой (ТС2) вращающего момента, причем основной источник (2) мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии с первой характеристической кривой (ТС1) вращающего момента, вспомогательный источник (3) мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии со второй характеристической кривой (ТС2) вращающего момента, транспортное средство приспособлено для приведения в движение от одного из основного источника (2) мощности и вспомогательного источника (3) мощности или одновременно от обоих этих источников мощности, а силовой агрегат дополнительно характеризуется ограничивающей кривой (А, As, А', Аʺ), которая обеспечивает ограничение, когда это применимо, текущей величины, задаваемой водителем транспортного средства, относительно первой и второй характеристических кривых (TC1, ТС2) вращающего момента в процессе приведения в движение транспортного средства, причем способ, при приведении в движение транспортного средства с одновременным использованием обоих источников (2, 3) мощности, включает:
определение текущей величины, задаваемой водителем (101);
определение текущего условия для адаптации тяги для транспортного средства (102);
корректировку ограничивающей кривой (A, As, А', Аʺ) силового агрегата в соответствии с коэффициентом (TF, TF') вращающего момента для адаптации тяги в зависимости от текущего условия для адаптации тяги (103);
когда это применимо, ограничение текущей величины, задаваемой водителем, в соответствии со скорректированной ограничивающей кривой (А, As, А', Аʺ) силового агрегата (104);
передачу команды в силовой агрегат на приведение в движение транспортного средства в соответствии с возможно ограниченной текущей величиной, задаваемой водителем (105).
2. Способ по п. 1, в котором ограничивающая кривая (A, As, А', Аʺ) силового агрегата используется в отношении вспомогательного источника (3) мощности.
3. Способ по любому из предыдущих пунктов, в котором коэффициент (TF, TF') вращающего момента для адаптации тяги представляет собой масштабирующий коэффициент, являющийся функцией преобладающего условия для адаптации тяги.
4. Способ по п. 3, в котором масштабирующий коэффициент (TF, TF') изменяется линейно со ступенчатыми приращениями.
5. Способ по п. 1, в котором стадия передачи команды в силовой агрегат на приведение в движение транспортного средства в соответствии с, возможно, ограниченной текущей величиной, задаваемой водителем (105), включает преобразование этой величины в заданную величину вращающего момента силового агрегата.
6. Способ по п. 5, дополнительно включающий распределение заданной величины вращающего момента силового агрегата между основным источником (2) мощности и вспомогательным источником (3) мощности (107).
7. Способ по п. 1, дополнительно включающий сброс ограничивающей кривой силового агрегата, когда действие преобладающего условия для адаптации тяги прекращается.
8. Способ по п. 1, в котором стадия определения текущего условия для адаптации тяги для транспортного средства (102) включает определение одного из следующих условий или их комбинации: определение того, что транспортное средство находится на наклонном участке дороги, определение уровня загрузки транспортного средства и определение того, что транспортное средство отстает от запланированного графика движения или опережает его.
9. Способ по п. 8, в котором стадия определения того, что транспортное средство находится на наклонном участке дороги (102), включает использование устройства измерения угла наклона, и в случае определения этим устройством нахождения транспортного средства на подъеме, определение того, что угол наклона равен заданному углу наклона или превышает его.
10. Способ по п. 9, в котором заданный угол наклона соответствует подъему по меньшей мере 7,5%, предпочтительно по меньшей мере 10% и более, предпочтительно по меньшей мере 12,5%.
11. Способ по п. 8, в котором стадия определения уровня загрузки транспортного средства (102) включает использование устройства измерения веса и определение того, что вес полезного груза, измеряемый этим устройством, равен заданному весу или превышает его.
12. Способ по п. 11, в котором величина заданного веса соответствует полезному грузу, равному 30%, предпочтительно 50% и более, предпочтительно 70% от веса конструкции транспортного средства.
13. Транспортное средство, имеющее силовой агрегат, содержащий основной источник (2) мощности с первой характеристической кривой (ТС1) вращающего момента, и вспомогательный источник (3) мощности со второй характеристической кривой (ТС2) вращающего момента, причем основной источник (2) мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии с первой характеристической кривой (ТС1) вращающего момента, вспомогательный источник (3) мощности приспособлен для обеспечения максимального выходного вращающего момента для каждой скорости вращения в соответствии со второй характеристической кривой (ТС2) вращающего момента, транспортное средство приспособлено для приведения в движение от одного из двух указанных источников (2, 3) мощности или одновременно от обоих источников (2, 3) мощности, а силовой агрегат дополнительно характеризуется ограничивающей кривой (A, As, А', Аʺ), которая обеспечивает ограничение, когда это применимо, текущей величины, задаваемой водителем транспортного средства, относительно первой и второй характеристических кривых (TC1, ТС2) вращающего момента в процессе приведения в движение транспортного средства, причем транспортное средство приспособлено для осуществления способа по любому из предыдущих пунктов.
14. Транспортное средство по п. 13, в котором основной источник (2) мощности представляет собой двигатель внутреннего сгорания.
15. Транспортное средство по п. 13 или 14, в котором вспомогательный источник (3) мощности представляет собой электрическую машину.
| US 6549840 B1, 15.04.2003 | |||
| СПОСОБ ЗАЩИТЫ СТАЛЬНЫХ ДЕТАЛЕЙ МАШИН ОТ СОЛЕВОЙ КОРРОЗИИ, ПЫЛЕВОЙ И КАПЕЛЬНО-УДАРНОЙ ЭРОЗИИ | 2002 |
|
RU2226227C1 |
| DE 10163382 A1, 04.07.2002 | |||
| US 2003160455 A1, 28.08.2003 | |||
| US 2005211479 A1, 29.09.2005. | |||

