Изобретение относится к электротехнике, в частности к позиционным электроприводам постоянного тока, и может быть использовано для автоматизации металлорежущих станков, электромеханических роботов, управления аэродинамическими рулями и в других механизмах систем радиотехники, автоматики и вычислительной техники.
В настоящее время известен сервопривод (Г.И. Гульков, Ю.Н. Петренко, Е.П. Раткевич, О.Л. Симоненкова). Системы автоматизированного управления электроприводами. Учебное пособие. Под общ. ред. Ю.Н. Петренко - Минск; ООО «Новое знание», 2004. стр. 249-251), содержащий датчик входного сигнала, выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен к выходу датчика положения, а выход ко входу управления преобразователя, соединенного с электродвигателем, связанным с исполнительным органом, на котором установлен датчик положения.
Недостатком известного устройства является низкая надежность в связи с тем, что электропривод в заданном положении теряет устойчивость и переходит в режим автоколебаний, обусловленных наличием различных механических факторов, что приводит к перегреву обмоток электродвигателя сервопривода.
Наиболее близким к предлагаемому является сервопривод (Труды ФГУП «НПЦАП». Системы и приборы управления. Научно-технический журнал. №4, 2012 г.), содержащий датчик входного сигнала, выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен к выходу датчика положения, а выход ко входу компаратора, выход которого подключен ко входу управления преобразователя, соединенного с электродвигателем, связанным через редуктор с исполнительным органом, на котором установлен датчик положения.
Недостатком известного устройства является низкая надежность в связи с тем, что электропривод в заданном положении теряет устойчивость и переходит в режим автоколебаний, обусловленных наличием различных механических факторов (моментом инерции исполнительного органа, люфтов в редукторе и т.п.) при постоянной величине зоны нечувствительности компаратора в контуре управления, что приводит к перегреву обмоток электродвигателя сервопривода.
Задачей изобретения является повышение надежности сервопривода.
Поставленная задача достигается тем, что для исключения перегрева обмоток электродвигателя сервопривода, вызванных потерей устойчивости сервопривода и переходом в режим автоколебаний при наличии различных механических факторов (моментом инерции исполнительного органа, люфтов в редукторе и т.п.) при постоянной величине зоны нечувствительности компаратора в контуре управления, согласно изобретению, компаратор снабжен блоком задания зоны нечувствительности, вход которого соединен через последовательную цепь из ключа, усилителя с задержкой, выпрямителя и фильтра высоких частот с выходом компаратора.
Сущность изобретения поясняется чертежом.
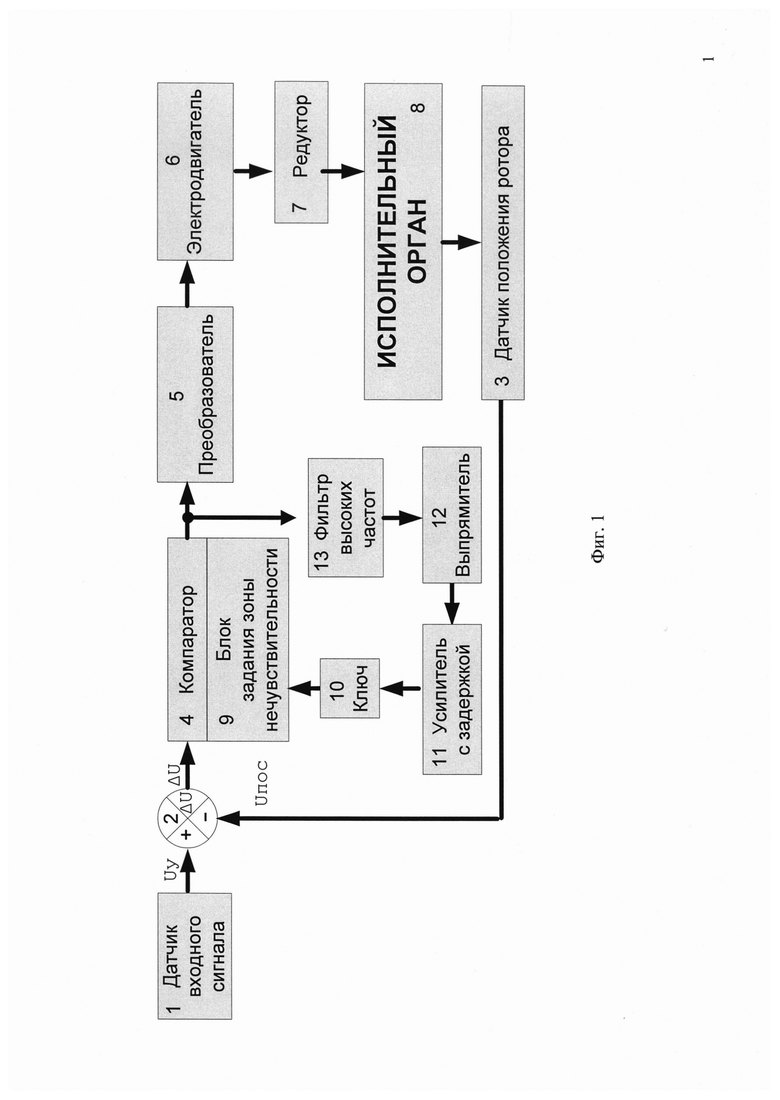
На фиг. 1 приведена схема электрическая шагового электропривода.
Сервопривод содержит датчик входного сигнала 1, выход которого подключен к первому входу измерителя рассогласования 2, второй вход которого подсоединен к выходу датчика положения 3, а выход ко входу компаратора 4, выход которого подключен ко входу управления преобразователя 5, соединенного с электродвигателем 6, связанным через редуктор 7 с исполнительным органом 8, на котором установлен датчик положения 3, при этом компаратор 4 снабжен блоком задания зоны нечувствительности 9, вход которого соединен через последовательную цепь из ключа 10, усилителя с задержкой 11, выпрямителя 12 и фильтра высоких частот 13 с выходом компаратора 4.
В конкретном устройстве датчик положения 3 может быть выполнен в виде потенциометра обратной связи.
Сервопривод (фиг. 1) работает следующим образом.
В установившемся режиме на вход измерителя рассогласования 2 приходит управляющий сигнал Uy с датчика входного сигнала 1, соответствующий требуемому углу положения исполнительного органа 8 сервопривода. На второй вход измерителя рассогласования 2 приходит сигнал Uпос с датчика положения 3, соответствующий текущему углу положения исполнительного органа 8. С выхода измерителя рассогласования 2 на вход компаратора 4 приходит арифметическая разность ΔU указанных сигналов. Сигнал, соответствующий результату сравнения, с выхода компаратора 4 подается на вход преобразователя 5, приводящего в движение электродвигатель 6, механически связанный через редуктор 7 с исполнительным органом 6, на котором установлен датчик положения 3. Из-за различных механических факторов, в том числе также из-за износа редуктора 7 в сервоприводе, возможно возникновение автоколебаний, амплитуда которых превышает заданную зону нечувствительности компаратора 4, а постоянная времени которых намного меньше постоянной времени изменения задающего входного сигнала 1. При этом на выходе компаратора 4 формируется двухполярный ШИМ-сигнал, частота которого также соответствует частоте автоколебаний. Для устранения атоколебаний сервопривода компаратор 4 снабжен блоком задания зоны нечувствительности 9. В этом случае указанный двухполярный ШИМ-сигнал с выхода компаратора 4 поступает на вход фильтра высоких частот 13, фильтрующего сигналы с частотой, соответствующей частоте автоколебаний. С выхода фильтра высоких частот 13, через выпрямитель 12 и усилитель с задержкой 11, однополярный сигнал подается на управляющий вход ключа 10, который увеличивает зону нечувствительности компаратора через блок задания зоны нечувствительности 9. Вследствие расширения зоны нечувствительности автоколебания затухают, сигнал с выхода фильтра высоких частот 13 снижается и ключ 10 выключается, уменьшая зону нечувствительности компаратора 4 до исходной величины.
Техническим результатом от использования предлагаемого технического решения является повышение надежности сервопривода путем исключения перегрева обмоток электродвигателя, обусловленного потерей устойчивости управления сервоприводом в заданной точке позиционирования вследствие воздействия различных механических возмущающих факторов, например, из-за износа рабочих поверхностей механической части редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ СЕРВОПРИВОД | 2016 |
|
RU2643179C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Способ управления нагрузкой горной машины и устройство для его осуществления | 1989 |
|
SU1707199A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| Следящая система | 1981 |
|
SU993202A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
Изобретение относится к области электротехники, в частности к позиционным электроприводам постоянного тока, и может быть использовано для автоматизации металлорежущих станков, электромеханических роботов, управления аэродинамическими рулями и в других механизмах систем радиотехники, автоматики и вычислительной техники. Техническим результатом является исключение перегрева обмоток электродвигателя, обусловленного потерей устойчивости управления сервоприводом в заданной точке позиционирования вследствие воздействия различных механических возмущающих факторов, например из-за износа рабочих поверхностей механической части редуктора. В сервопривод, содержащий датчик входного сигнала, выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен к выходу датчика положения, а выход - ко входу компаратора, выход которого подключен ко входу управления преобразователя, соединенного с электродвигателем, связанным через механический редуктор с исполнительным органом, на котором установлен датчик положения, компаратор снабжен блоком задания зоны нечувствительности, вход которого соединен через последовательную цепь из ключа, усилителя с задержкой, выпрямителя и фильтра высоких частот с выходом компаратора. 1 ил.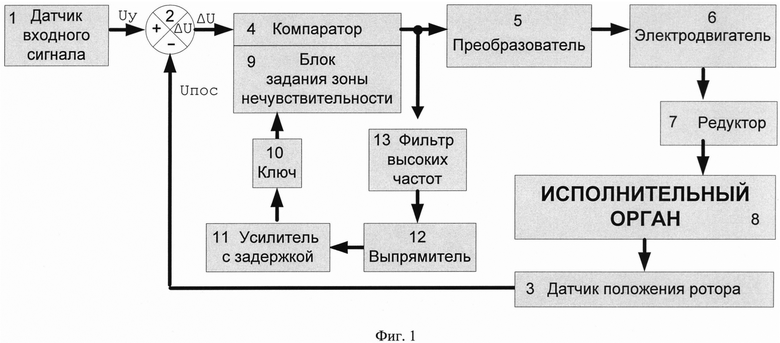
Сервопривод, содержащий датчик входного сигнала, выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен к выходу датчика положения, а выход - ко входу компаратора, выход которого подключен ко входу управления преобразователя, соединенного с электродвигателем, связанным через механический редуктор с исполнительным органом, на котором установлен датчик положения, отличающийся тем, что, с целью повышения надежности, компаратор снабжен блоком задания зоны нечувствительности, вход которого соединен через последовательную цепь из ключа, усилителя с задержкой, выпрямителя и фильтра высоких частот с выходом компаратора.
| СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2318232C2 |
| СЛЕДЯЩИЙ ПРИВОД | 2007 |
|
RU2361258C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2318233C2 |
| Следящий привод | 1982 |
|
SU1012198A1 |
| DE 10135220 A1, 20.02.2003 | |||
| JP 8147016 A, 16.07.1996 | |||
| US 6794842 B2, 21.09.2004 | |||
| WO 1998007077 A1, 19.02.1998. | |||

