«Область техники, к которой относится изобретение»
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике, и может быть использовано для регулирования движения поездов.
«Уровень техники»
Известен способ контроля свободности путевых участков, заключающийся в том, что в рельсовую линию на одном конце подают сигнал переменного тока, на другом контролируют изменение сигнала в зависимости от координаты поездного шунта и по характеру изменения сигнала фиксируют освобождение путевого участка, после занятия предыдущей рельсовой цепи и истечения заданного интервала времени фиксируют опорное напряжение - напряжение приемного конца данной рельсовой цепи, по которому определяют пороговые напряжения занятия и освобождения, сравнивая пороговые напряжения с текущим, определяют состояние участка, после освобождения данного и следующего участков вновь переопределяют опорное напряжение [Патент РФ №2238867, МПК В61L 23/16. Способ контроля свободности путевых участков. Авторы: Полевой Ю.И., Полевая Л.В., Яковлев В.Н., Смышляев В.А., Гуменников В.Б. БИ №30, 2004 г.].
Недостатком этого способа является то, что при наличии значительной продольной асимметрии возможен ложный контроль состояния путевых участков.
Известен способ контроля местонахождения объекта (приемник на локомотиве) с участием глобальной навигационной системы спутниковой (ГЛОНАСС).
Способ основан на измерении времени распространения сигналов от спутников до объекта (приемника сигналов на подвижном составе) с использованием высокоточных часов. [Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС, автор Яценков B.C., 2005, Горячая линия - Телеком, ISBN: 5-93517-218-6].
Недостатком этого способа является то, что для определения местонахождения объекта требуется несколько десятков спутников.
«Раскрытие изобретения»
Техническим результатом, на достижение которого направлено данное изобретение, является снижение количества спутников до трех, а следовательно, и снижение капитальных и эксплуатационных затрат.
Технический результат достигается тем, что способ контроля местонахождения подвижного состава, заключающийся в том, что с головного спутника в заданные моменты времени передаются сигналы, которые принимаются приемником на подвижном составе на земле, первый и второй вспомогательные спутники также получают сигналы с головного спутника и транслируют их на приемник на подвижном составе на земле, определяются разницы во времени между моментами приема сигналов с трех спутников, что позволяет определить расстояние между первым вспомогательным спутником и объектом, а также между вторым вспомогательным спутником и объектом, благодаря чему, определяется координата приемника на подвижном составе на пути.
«Краткое описание чертежей»
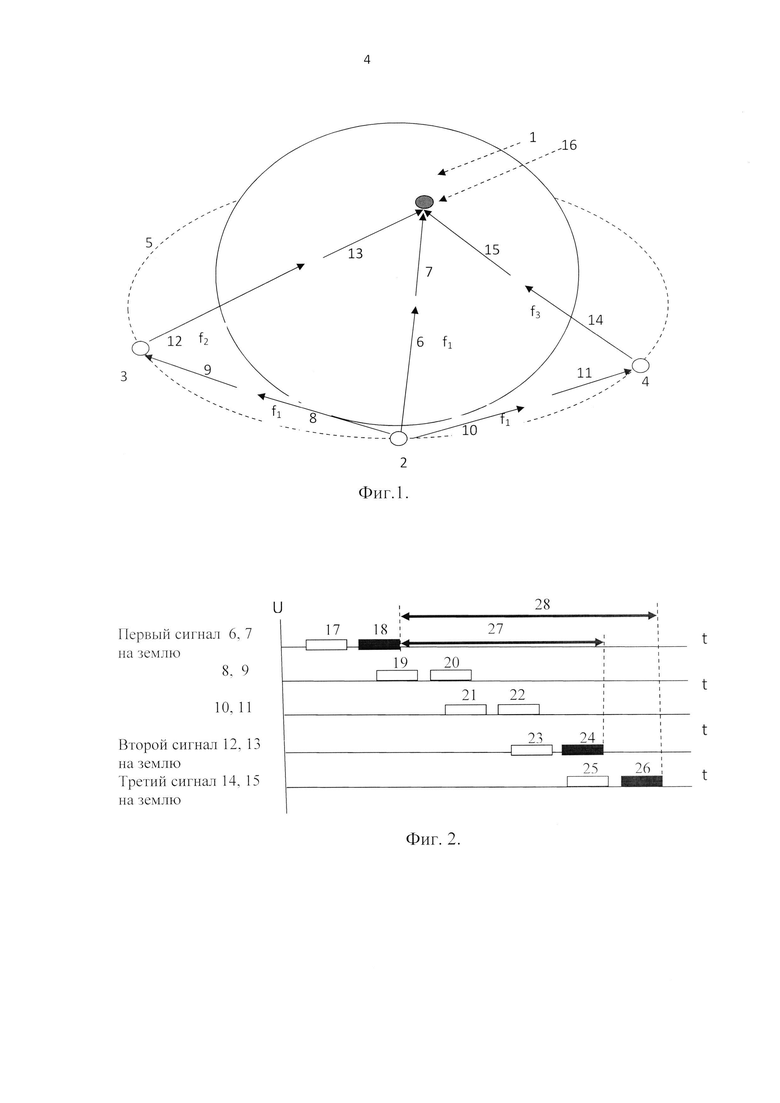
На фиг. 1 представлено изображение земли с тремя спутниками на геостационарной орбите, на Фиг. 2 - временная диаграмма с сигналами между спутниками и между спутниками и землей (приемником).
«Осуществление изобретения»
На фиг. 1 представлены: полушарие земли - 1, головной спутник - 2, первый вспомогательный спутник - 3, второй вспомогательный спутник - 4, геостационарная орбита спутников - 5, передаваемый сигнал с головного спутника в сторону земли - 6, принимаемый сигнал (приемником) с головного спутника - 7, передаваемый сигнал с головного спутника в сторону первого вспомогательного спутника - 8, принимаемый сигнал с первым вспомогательным спутником с головного спутника - 9, передаваемый сигнал с головного спутника в сторону второго вспомогательного спутника - 10, принимаемый сигнал вторым вспомогательным спутником с головного спутника - 11, передаваемый сигнал с первого вспомогательного спутника в сторону земли - 12, принимаемый сигнал с первого вспомогательного спутника приемником - 13, передаваемый сигнал со второго вспомогательного спутника в сторону земли - 14, принимаемый сигнал со второго спутника приемником - 15, приемник сигналов на подвижном составе - 16.
На Фиг. 2 представлены сигналы 16 и 17 от головного спутника к приемнику, сигналы 19 и 20 от головного спутника к первому вспомогательному спутнику, сигналы 21 и 22 от головного спутника к второму вспомогательному спутнику, сигналы 23 и 24 от первого вспомогательного спутника к приемнику, сигналы 25 и 26 от второго вспомогательного спутника к приемнику, временной интервал 27 между фронтом импульса 18 и фронтом импульса 24, временной интервал 28 между фронтом импульса 18 и фронтом импульса 26.
Действие способа осуществляется следующим образом. Сигнал (см. фиг. 1) 6 посылается с головного спутника 2 на землю 1 (на приемник 16) частотой f1, сигналы 8 и 10 - в сторону первого 3 и второго 4 вспомогательных спутников также частотой f1, сигнал 7 частотой f1 принимается на земле 1 приемником 16, сигналы 9 и 11 частотой f1 принимаются соответственно на первом 3 и втором 4 вспомогательных спутниках, сигналы 12 и 14 соответственно частотой f2 и f3 передаются на землю с первого 3 и второго 4 вспомогательных спутников, сигналы 13 и 15 соответственно частотами f2 и f3 принимаются на земле 1 приемником 16.
Сигналы 7 и 13, 7 и 15 принимаются приемником 16 не одновременно, по интервалам между этими сигналами определяется разница расстояний между спутником 3 и приемником 16, а также между спутником 4 и приемником 16, что позволяет определить координату приемника 16 на подвижном составе на пути.
На локомотиве, кроме приемника 16, предусмотрена и ЭВМ (на фиг. 1 не изображена), в памяти которой хранится информация о плане и профиле пути. С учетом профиля пути и расстояний от приемника до спутников 3 и 4 определяется координата местонахождения приемника.
Предложенный способ позволяет снизить количество спутников до трех и, следовательно, снизить капитальные и эксплуатационные затраты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2017 |
|
RU2655106C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ И СЛЕЖЕНИЯ ЗА УДАЛЕННЫМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2290763C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 1997 |
|
RU2161318C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1996 |
|
RU2082279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УДАЛЕННОГО ОБЪЕКТА, СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ И ИНТЕГРИРОВАННАЯ СИСТЕМА, ОСУЩЕСТВЛЯЮЩАЯ ЭТИ СПОСОБЫ | 1993 |
|
RU2128884C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики для контроля местонахождения подвижного состава. Способ заключается в передаче сигналов с головного спутника в заданные моменты времени, приеме указанных сигналов приемником на подвижном составе на земле. Причем первый и второй вспомогательные спутники также получают сигналы с головного спутника и транслируют их на приемник на подвижном составе на земле, определяются разницы во времени между моментами приема сигналов с трех спутников, что позволяет определить расстояние между первым вспомогательным спутником и объектом, а также между вторым вспомогательным спутником и объектом, благодаря чему определяется координата приемника на подвижном составе на пути. Достигается упрощение способа определения местоположения подвижного состава. 2 ил.
Способ контроля местонахождения подвижного состава, заключающийся в передаче сигналов с головного спутника в заданные моменты времени, приеме указанных сигналов приемником на подвижном составе на земле, отличающийся тем, что первый и второй вспомогательные спутники также получают сигналы с головного спутника и транслируют их на приемник на подвижном составе на земле, определяются разницы во времени между моментами приема сигналов с трех спутников, что позволяет определить расстояние между первым вспомогательным спутником и объектом, а также между вторым вспомогательным спутником и объектом, благодаря чему определяется координата приемника на подвижном составе на пути.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ПОЕЗДОВ | 1997 |
|
RU2145423C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| УСОВЕРШЕНСТВОВАННЫЕ СИНХРОНИЗАЦИЯ ПО ВРЕМЕНИ И ПЕРЕДАЧА ЗНАЧЕНИЙ ВРЕМЕНИ ДЛЯ ГРУППИРОВОК СПУТНИКОВ ПОСРЕДСТВОМ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ СПУТНИКАМИ И ИСПОЛЬЗОВАНИЯ ИСТОЧНИКА ТОЧНОГО ВРЕМЕНИ | 2012 |
|
RU2608763C2 |
| А | |||
| В | |||
| Царюк, Д | |||
| С | |||
| Муратов, В | |||
| И | |||
| Серенков ст | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Федеральное государственное бюджетное образовательное учреждение высшего образования "Сибирский государственный университет науки и технологий имени академика М.Ф | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Радиотрансляция | 1921 |
|
SU773A1 |

