Изобретение относится к классу машиностроения.
Известен многопозиционный пневматический модуль линейных перемещений (патент SU 1474344, 23.04.1989), который содержит цилиндр с поршнем, связанным с выходным элементом, узел фиксации, фиксатор, взаимодействующий с гнездами (впадинами) копирной линейки, и блок управления с пневмораспределителями. Перемещение поршня происходит в ту или другую сторону при подаче рабочей среды в одну из полостей цилиндра при выходе фиксатора из соответствующего гнезда копирной линейки. В результате поршень перемещается к точке позиционирования. В момент достижения позиции блок управления по сигналу обратной связи приближает фиксатор к копирной линейке и жестко фиксирует выходной элемент. Изменение задания позиционируемых точек выполняется путем замены копирной линейки.
Недостатками известного устройства являются неудобство изменения задания позиций с помощью замены копирной линейки и сложность конструкции узла фиксации и блока управления.
Известное устройство по патенту SU 1474344, 23.04.1989 принято за прототип.
Техническим результатом является упрощение механических и управленческих узлов за счет сокращения числа элементов устройства.
Технический результат достигается тем, что предложенный многопозиционный пневматический модуль линейных перемещений, содержащий рабочий цилиндр с поршнем, выходной элемент, узел фиксации, фиксатор и углубления, с которыми взаимодействует фиксатор, блок управляемых пневматических распределителей и источник пневматического давления, в котором по модели выходной элемент выполнен в виде штока с плоской стороной, которым снабжен поршень рабочего цилиндра, на плоской стороне штока размещены вдоль два ряда впадин, равномерно чередующихся с выступами, впадины одного ряда расположены против выступов другого ряда, фиксатор установлен поперек рядов впадин и выступов и выполнен в виде поворотного сектора на оси, толщина которого равна ширине впадины, и размещенного между упорами, узел фиксации снабжен приводом в виде пневмоцилиндра с поршнем и возвратной пружиной, пневмоцилиндр фиксатора расположен в плоскости фиксатора, шток цилиндра соединен с фиксатором с возможностью перемещения в пазу фиксатора, в блоке управляемых пневматических распределителей установлены переключатель направления перемещения поршня рабочего цилиндра и повторитель импульсного управления.
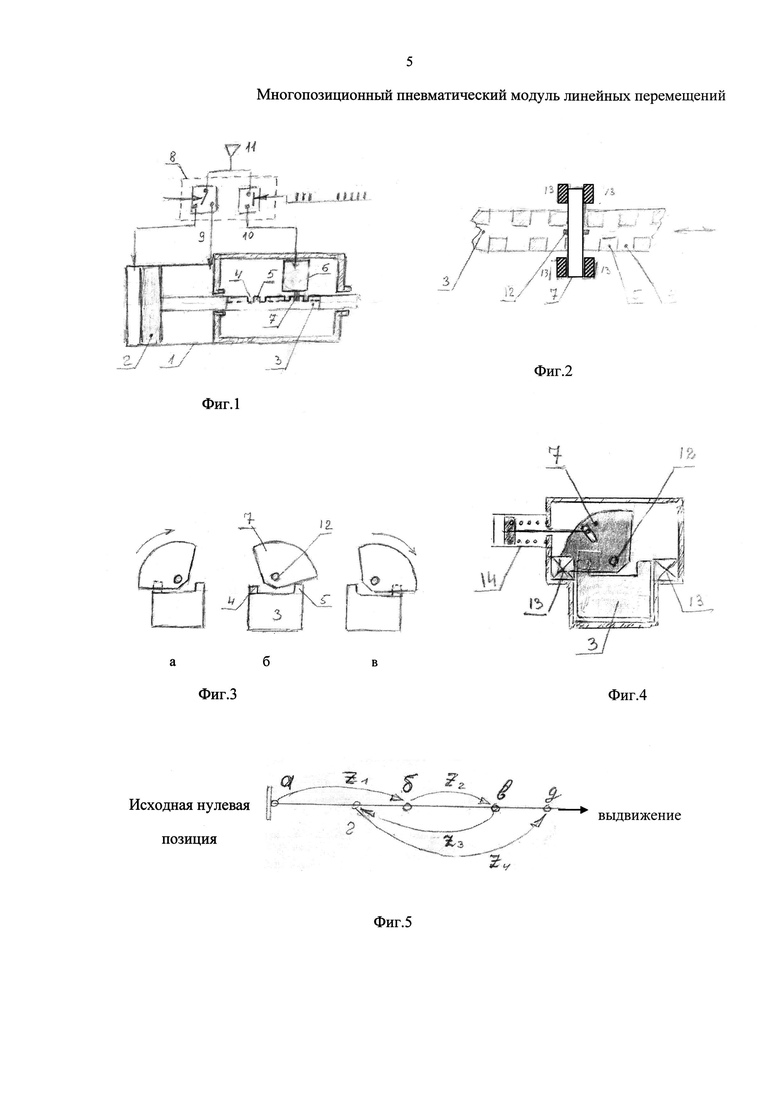
На фиг. 1 представлен многопозиционный пневматический модуль.
На фиг. 2 - взаимное расположение фиксатора с впадинами и выступами на штоке.
На фиг. 3 - взаимодействие фиксатора со штоком.
На фиг. 4 - узел фиксации.
На фиг. 5 - диаграмма пошагового движения штока.
Принятые обозначения: 1 - рабочий цилиндр (РЦ), 2 - поршень РЦ, 3 - шток РЦ, 4 - впадина, 5 - выступ, 6 - узел фиксации, 7 - фиксатор, 8 - блок управляемых пневматических распределителей, 9 - переключатель направления, 10 - повторитель, 11 - источник пневматического давления. 12 - ось фиксатора, 13 - упоры, 14 - пневмопривод фиксатора.
Многопозиционный модуль (фиг. 1) содержит рабочий цилиндр 1 с поршнем 2, выходной элемент, выполненный в виде штока 3 с плоской стороной (например, шток прямоугольного сечения) и соединенный с поршнем, впадины 4 и выступы 5, узел фиксации 6 с фиксатором 7, блок 8 управляемых пневматических распределителей, содержащий переключптель направления 9 перемещения поршня рабочего цилиндра, повторитель 10 управляющих фиксатором импульсов и источник пневматического давления 11.
На плоской стороне штока (фиг. 2) впадины 4 и выступы 5 размещены вдоль штока 3 в два ряда таким образом, что впадины одного ряда расположены против выступов другого ряда, при этом фиксатор 7, толщина которого равна ширине впадины, расположен поперек штока на оси 12 между упорами 13. узел фиксации 6 (фиг. 4) содержит пневмопривод 14. выполненный в виде цилинра с поршнем, штоком и возвратной пружиной, шток которого соединен с фиксатором 7 с возможностью перемещения в прорези фиксатора, выполненного в виде поворотного вокруг оси сектора.
Модуль работает следующим образом. По заданной программе передвижения по позициям штока 3 рабочего цилиндра подаются сигналы на переключатель направления 9 и в виде группы импульсов на повторитель 10 блока управляемых пневматических распределителей 8. Шток 3 выполняет пошаговое движение от позиции к позиции с помощью узла фиксации 6, количество переключений которого соответствует количеству управляющих импульсов в заданной группе. Взаимодействие фиксатора 7 со штоком 3 пояснено на фиг. 3. При отсутствии управляющего импульса фиксатор занимат одно и то же положение (фиг. 3,а) за счет воздействия возвратной пружины в цилиндре пневмопривода 14. При появлении пневматического импульса пневмопривод 14 поворачивает вокруг оси 12 сектор фиксатора 7, один край которого выходит из впадины 4 одного ряда, а второй край упирается в выступ 5 другого ряда (фиг. 3,б). В зависимости от того, в какую сторону напряжен шток 3 пневматическим давлением, поданным в рабочий цилиндр 1, упершийся в выступ 5 край сектора фиксатора соскальзывает с этого выступа в предыдущую или последующую ему соседнюю впадину (фиг. 3,в), пропуская шток в ту или другую сторону на полшага. При исчезновении управляющего импульса сектор фиксатора совершит под действием возвратной пружины пневмопривода 14 обратное подобное движение, пропустив шток на вторую половину шага. Процесс воздействия фиксатора на этом заканчивается, и шток остается зафиксированным до появления следующего управляющего импульса. Поданное по программе количество пневмоимпульсов задает величину пошагового перемещения штока 3 от позиции к позиции. На фиг. 5 показана диаграмма, поясняющая перемещение штока 3 (выходного элемента модуля) на примере последовательной отработки четырех позиций. Переходы от одной позиции к другой задаются количеством Z импульсов, путем последовательного прибавления очередной группы импульсов к предыдущей. Так, на диаграмме перемещение из исходной нулевой точки позиционирования а по заданию группой импульсов по количеству Z1 происходит соответствующее пошаговое перемещение штока из точки позиционирования а в точку б, далее по программе перемещение штока выполняется в точку в позиционирования подачей второй группы импульсов в количестве Z2. При этом, поскольку направление движения штока не изменяется, сигнал на изменение направления движения штока не подается. При дальнейшем передвижении штока в позицию г по заданному количеству импульсов Z3 одновременно с подачей импульсов подается пневматический сигнал и на переключение давления в рабочем цилиндре 1 переключателем направления 9 в блоке 8 управляемых распределителей. Такое же переключение направления необходимо выполнить и при переходе к четвертой точке позиционирования g, которая задается группой импульсов в количестве Z4.
Таким образом, можно выполнять различные программы позиционирования многопозиционного пневматического модуля линейных перемещений и гибко выполнять их перепрограммирование. При этом достаточно задавать короткие группы импульсов только для перехода от позиции к позиции при простом прямом управлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| Пневмогидравлический дозатор | 1978 |
|
SU764932A1 |
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| Устройство для дистанционного управления локомотивом | 1976 |
|
SU647162A1 |
| Многопозиционный электропневматический привод | 1981 |
|
SU954643A1 |
| Многопозиционный агрегатный станок | 1989 |
|
SU1779544A1 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| Устройство для перемещения вырубленных заготовок в многопозиционном прессе | 1989 |
|
SU1712037A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
Изобретение относится к области машиностроения. Техническим результатом является упрощение конструкции. Многопозиционный пневматический модуль линейных перемещений содержит рабочий цилиндр с поршнем, выходной элемент, узел фиксации, фиксатор и углубления, с которыми взаимодействует фиксатор, блок управляемых пневматических распределителей и источник пневматического давления. Выходной элемент выполнен в виде штока с плоской стороной, которым снабжен поршень рабочего цилиндра, на плоской стороне штока размещены вдоль два ряда впадин, равномерно чередующихся с выступами, впадины одного ряда расположены против выступов другого ряда, фиксатор установлен поперек рядов впадин и выступов и выполнен в виде поворотного сектора на оси, толщина которого равна ширине впадины, и размещен между упорами. Узел фиксации снабжен приводом в виде пневмоцилиндра с поршнем и возвратной пружиной, при этом пневмоцилиндр фиксатора расположен в плоскости фиксатора, шток цилиндра соединен с фиксатором с возможностью перемещения в пазу фиксатора, в блоке управляемых пневматических распределителей установлены переключатель направления перемещения поршня рабочего цилиндра и повторитель импульсного управления. 5 ил.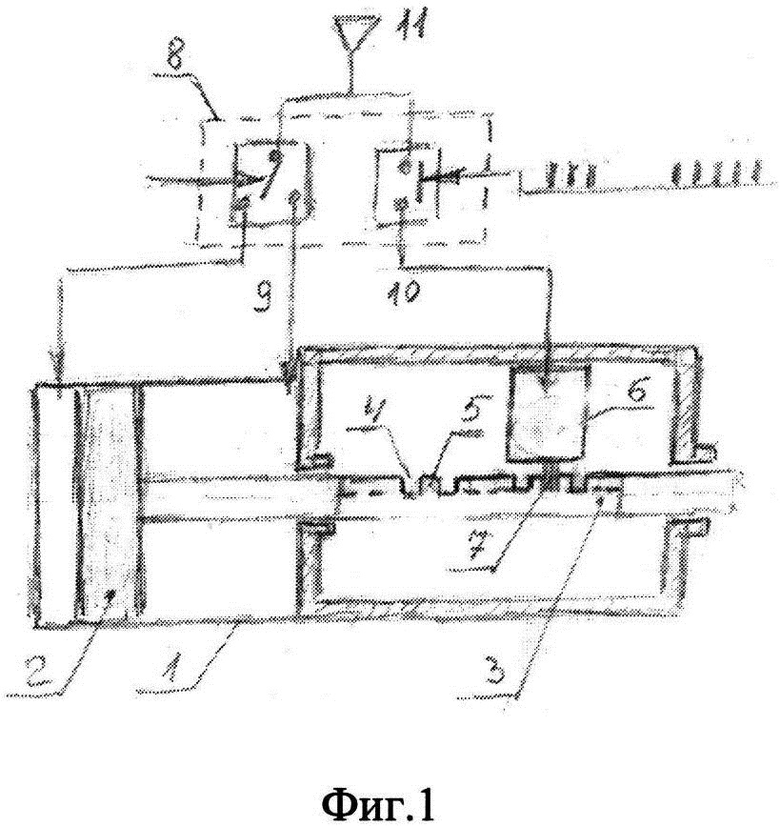
Многопозиционный пневматический модуль линейных перемещений, содержащий рабочий цилиндр с поршнем, выходной элемент, узел фиксации, фиксатор и углубления, с которыми взаимодействует фиксатор, блок управляемых пневматических распределителей и источник пневматического давления, отличающийся тем, что выходной элемент выполнен в виде штока с плоской стороной, которым снабжен поршень рабочего цилиндра, на плоской стороне штока размещены вдоль два ряда впадин, равномерно чередующихся с выступами, впадины одного ряда расположены против выступов другого ряда, фиксатор установлен поперек рядов впадин и выступов и выполнен в виде поворотного сектора на оси, толщина которого равна ширине впадины, и размещенного между упорами, узел фиксации снабжен приводом в виде пневмоцилиндра с поршнем и возвратной пружиной, пневмоцилиндр фиксатора расположен в плоскости фиксатора, шток цилиндра соединен с фиксатором с возможностью перемещения в пазу фиксатора, в блоке управляемых пневматических распределителей установлены переключатель направления перемещения поршня рабочего цилиндра и повторитель импульсного управления.
| Многопозиционный пневматический модуль линейных перемещений | 1986 |
|
SU1474344A1 |
| DE 3124915 A1, 13.01.1983 | |||
| СОСТАВ МУЛЬЧИРУЮЩЕГО ПОКРЫТИЯ (ВАРИАНТЫ) | 2012 |
|
RU2497916C1 |
| Полосковый спиральный резонатор | 1986 |
|
SU1394281A1 |
| Станок для намотки ленты на ребро при изготовлении элетрических катушек | 1977 |
|
SU942179A1 |

