Область техники, к которой относится изобретение
Настоящее изобретение относится к автомобильным транспортным средствам, в частности, к способу оптимизации расхода топлива в транспортном средстве, а также к системе транспортного средства, которая рекомендует оператору транспортного средства начать движение накатом при приближении транспортного средства к местоположению предстоящей остановки.
Уровень техники
Во время эксплуатации транспортного средства зачастую возникает необходимость его остановки перед светофорами и знаками остановки, из-за интенсивного транспортного потока и т.д. В таких случаях транспортному средству целесообразно использовать прием движения накатом. Однако движение накатом может быть начато довольно поздно, что может привести к снижению эффективности использования топлива и усиленному торможению транспортного средства.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения представлены транспортное средство и способ сигнализации для оператора (пользователя) автомобильного транспортного средства, обеспечивающие оптимизацию расстояния до остановки. Способ включает в себя определение скорости транспортного средства и определение предпочтительного времени для выполнения остановки на основании, по крайней мере частично, скорости транспортного средства. Способ также включает в себя определение максимального приемлемого времени для выполнения остановки на основании, по крайней мере частично, скорости транспортного средства. Сначала выполняется определение показателя движения накатом транспортного средства, после чего может быть определено оптимальное расстояние для начала движения накатом. Способ также включает в себя подачу сигнала оператору транспортного средства для начала движения накатом. Сигнал может быть подан при достижении места с оптимальным расстоянием или несколько раньше.
Места остановки могут быть определены с помощью таких данных, как ретроспективные данные системы глобального позиционирования (GPS) о местах остановки, с помощью камеры транспортного средства или других подходящих технологий. Указанные технологии также могут быть использованы для определения местоположения транспортного средства относительно места остановки.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения будут поняты и оценены специалистами в данной области техники после изучения приведенных ниже описания, формулы изобретения и сопроводительных чертежей.
Краткое описание чертежей
На данных чертежах представлено следующее:
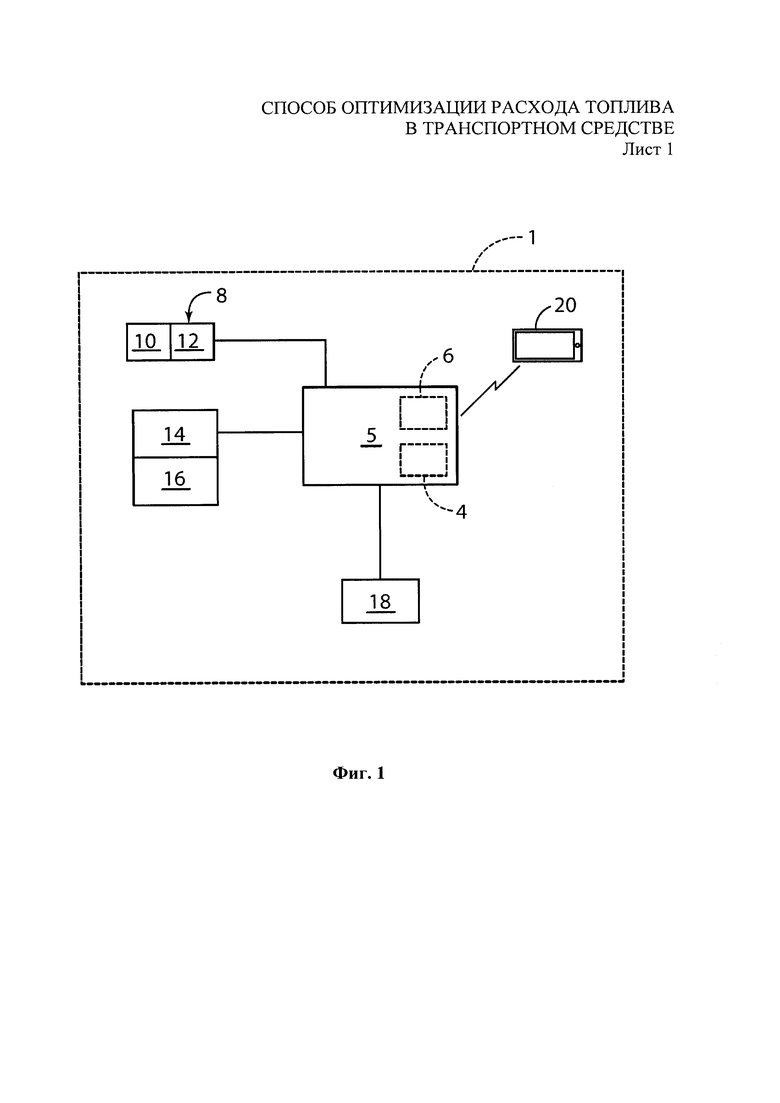
на фиг. 1 представлено схематическое изображение транспортного средства, включающего в себя различные компоненты, которые могут быть использованы для осуществления способа в соответствии с одним аспектом настоящего изобретения;
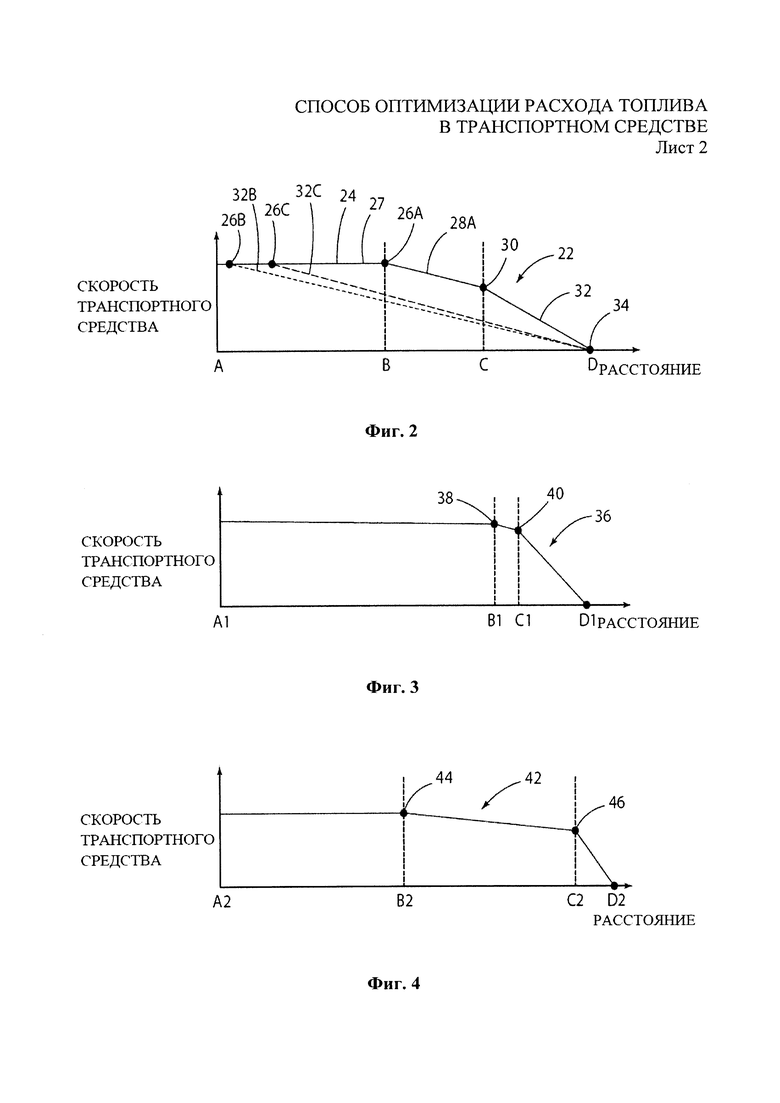
на фиг. 2 представлен график зависимости скорости транспортного средства от расстояния для оптимального момента в соответствии с одним аспектом настоящего изобретения;
на фиг. 3 представлен график зависимости скорости транспортного средства от расстояния, на котором изображена ситуация, когда оператор начинает движение накатом слишком поздно относительно оптимального момента;
на фиг. 4 представлен график зависимости скорости транспортного средства от расстояния, на котором изображена ситуация, когда оператор начинает торможение слишком поздно относительно оптимального момента;
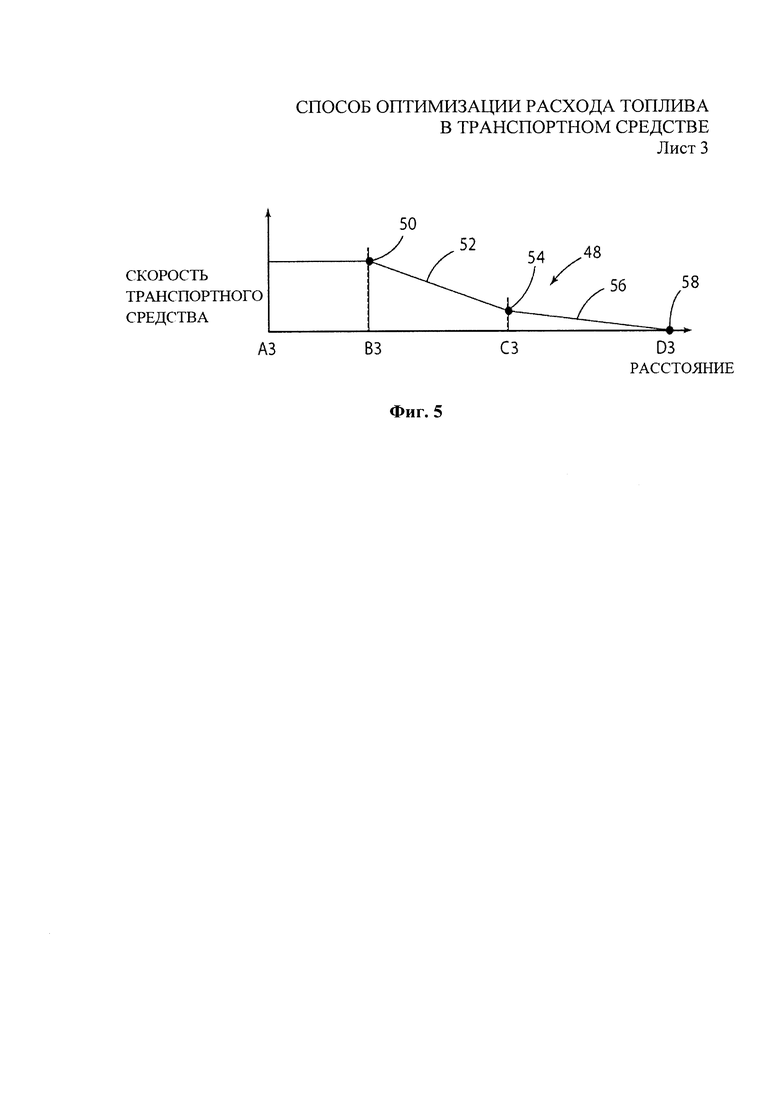
на фиг. 5 представлен график зависимости скорости транспортного средства от расстояния, на котором изображена ситуация, когда оператор начинает движение накатом слишком рано;
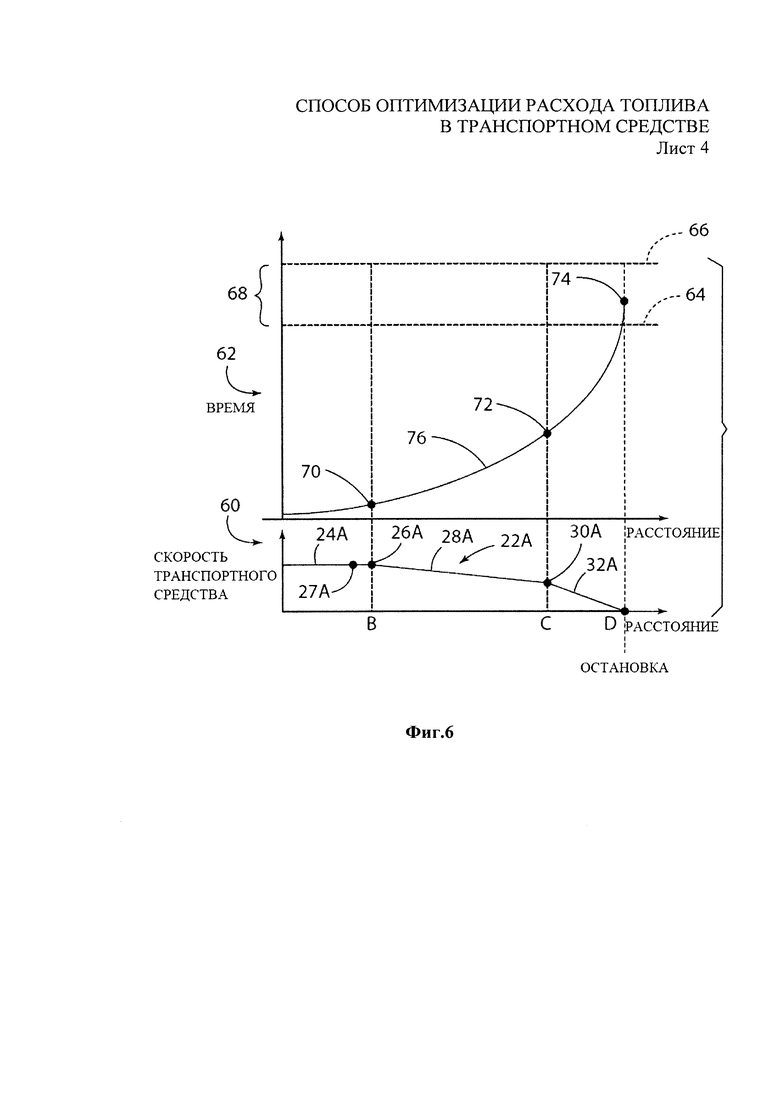
на фиг. 6 представлен график зависимости времени и скорости транспортного средства от расстояния в соответствии с одним аспектом настоящего изобретения;
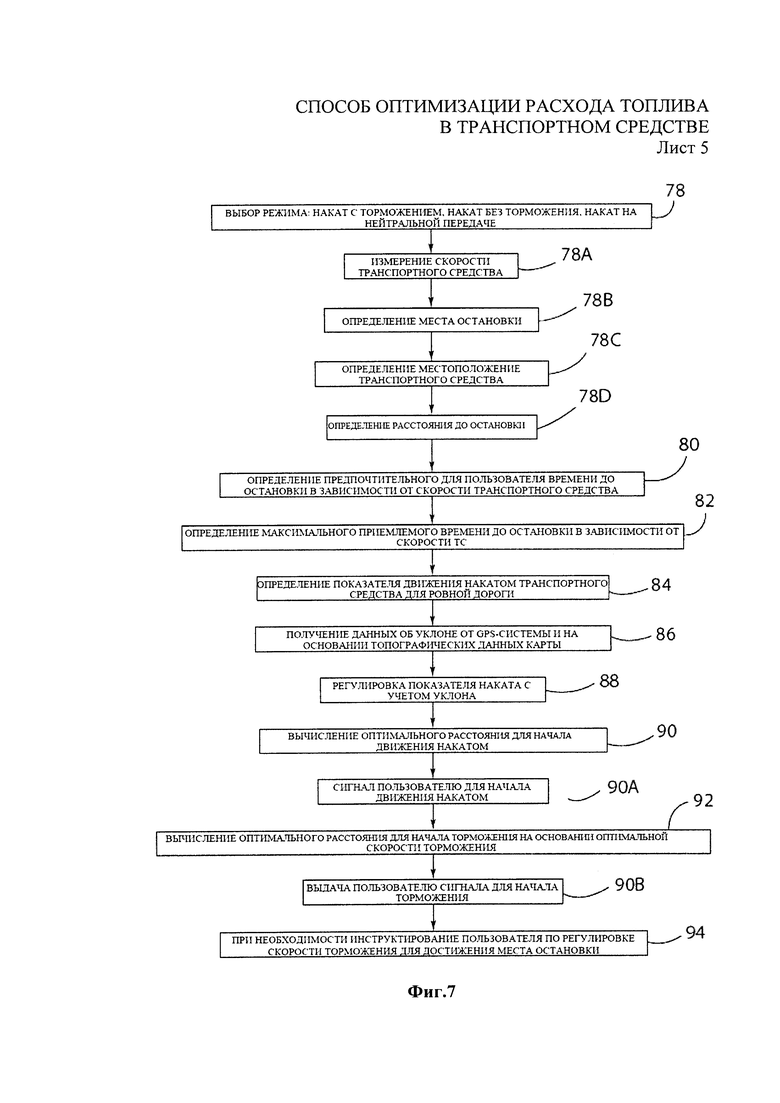
на фиг. 7 представлена блок-схема для способа, соответствующего одному аспекту настоящего изобретения.
Осуществление изобретения
В данном тексте термины «верхний», «нижний», «правый», «левый», «задний», «передний», «вертикальный», «горизонтальный» и их производные относятся к ориентации изобретения, представленной на фиг. 1. Однако следует понимать, что изобретение может предполагать альтернативные варианты ориентации, если не указано иное. Также следует понимать, что конкретные устройства и способы, изображенные на сопроводительных чертежах и изложенные в следующем описании, являются иллюстративными вариантами осуществления изобретения, описанного в формуле изобретения. Таким образом, конкретные размеры и другие физические характеристики, указанные в вариантах осуществления настоящего изобретения, не должны рассматриваться как ограничения, если не указано иное.
Изображенное на фиг. 1 автомобильное транспортное средство 1 может включать в себя двигатель внутреннего сгорания (не показан) и (или) систему электропривода (не показана). Настоящее изобретение может быть использовано в автомобильных транспортных средствах, имеющих стандартные двигатели внутреннего сгорания (например, бензиновые и дизельные двигатели), также оно может быть использовано в транспортных средствах с системами электропривода. Кроме того, настоящее изобретение может быть использовано в гибридных транспортных средствах, имеющих двигатель внутреннего сгорания и электропривод. Изобретение может быть использовано в транспортных средствах, осуществляющих отбор энергии во время торможения, включая электрические и (или) гибридные транспортные средства, которые генерируют электрическую энергию за счет энергии торможения.
В представленном примере автомобильное транспортное средство 1 включает в себя контроллер 5, который может быть функционально соединен с GPS-устройством 8, имеющим передатчик 10 и приемник 12. Транспортное средство 1 также может включать в себя устройство 14 ввода, которое позволяет оператору (пользователю) транспортного средства осуществлять ввод данных в контроллер 5. Устройство 16 отображения может быть использовано для подачи визуальных и (или) звуковых сигналов оператору транспортного средства. Следует понимать, что панель 14 управления может включать в себя одну или несколько кнопок или других элементов ввода, либо устройство 14 ввода может представлять собой сенсорный экран, объединенный с устройством 16 отображения. Устройство 16 отображения может включать в себя либо светодиодный или жидкокристаллический дисплей, либо одну или несколько индикаторных ламп, подвижные механические устройства, в том числе, стрелку-указатель, либо аналогичные устройства, которые подают визуальный (световой) сигнал оператору транспортного средства 1. Транспортное средство 1 также может включать в себя датчик 18 скорости, функционально соединенный с контроллером 5. Контроллер 5 может быть выполнен с возможностью обмена данными с мобильным телефоном 20, в котором использована известная беспроводная технология передачи данных. Следует понимать, что контроллер 5 может включать в себя один или несколько отдельных процессоров и другие компоненты, необходимые для конкретного автомобильного транспортного средства 1.
На контроллер 5 могут быть переданы данные о местах остановки, соответствующих знакам остановки и (или) другим известным типам участков дороги, в которых автомобильное транспортное средство 1 должно останавливаться. Данные о местах остановки могут быть сохранены на запоминающем устройстве 6 (блоке памяти) контроллера 5. Контроллер 5 также может включать в себя беспроводной приемопередатчик 4, который может быть использован для приема данных о местах остановки от удаленного источника с помощью известных систем беспроводной передачи данных. Данные о местоположении знаков остановки могут включать в себя GPS-данные, полученные с помощью известных GPS-систем, в качестве альтернативы данные о местоположении может быть получены с помощью карт, доступных через сеть, или их аналогов. В качестве альтернативы местоположение знака остановки относительно транспортного средства может быть определено с помощью других подходящих технологий, например, бортовой камеры, бортового радиолокационного устройства или лазерного локатора (лазерной измерительной системы).
GPS-устройство 8 определяет местоположение автомобильного транспортного средства 1, после чего данные о местоположении автомобильного транспортного средства 1 используются контроллером 5 для определения расстояния между автомобильным транспортным средством 1 и предстоящими местоположениями остановок. В дополнение к данным о местах остановки, на контроллер 5 могут быть также отправлены GPS-данные о местоположении дорог, площадок для парковки и другая информация о маршруте. С помощью данных о положении и (или) скорости, полученных от GPS-устройства 8 и (или) датчика 18 скорости, контроллер 5 определяет ближайшее местоположение остановки, которое наиболее вероятно встретится на пути автомобильного транспортного средства 1.
Как более подробно будет сказано ниже, контроллер 5 выполнен с возможностью определения оптимального расстояния до предстоящего местоположения остановки для начала движения накатом, при этом контроллер 5 выдает команду на устройство 16 отображения (или другой звуковой или визуальный индикатор) о сигнализации оператору начинать движение накатом, когда транспортное средство 1 находится в местоположении, соответствующем оптимальному расстоянию (или оптимальному времени) для начала движения накатом. Поскольку между моментом выдачи/отображения сигнала «движение накатом» и моментом, когда оператор начнет движение накатом, может пройти некоторое время, контроллер 5 также может быть выполнен с возможностью подачи команды включить визуальный и (или) звуковой сигнал на устройство 16 отображения незадолго до того, как транспортное средство достигнет оптимального расстояния для начала движения накатом. Например, если транспортное средство движется со скоростью 45 миль/ч (66 футов в секунду), а задержка реакции оператора составляет 0,50 секунды, то контроллер 5 может быть выполнен с возможностью выдачи оператору сигнала «движение накатом» за 33 фута до того, как автомобильное транспортное средство 1 достигнет оптимального расстояния для начала движения накатом. Следует понимать, что контроллер 5 может измерять несколько значений временных задержек между подачей сигнала «движение накатом» и временем, предоставляемом оператору для начала движения накатом, чтобы получить среднюю или ожидаемую задержку для конкретного оператора автомобильного транспортного средства. В качестве альтернативы контроллер 5 может быть выполнен с возможностью заблаговременной подачи сигнала на основании данных испытаний с участием множества операторов автомобильных транспортных средств или других заранее определенных критериев.
В общем случае определение оптимального расстояния для начала движения накатом включает в себя определения оптимального сочетания между заблаговременным движением накатом, которое уменьшает расход топлива, но требует больше времени, и поздним началом движения накатом, которое сокращает время, необходимое для остановки, но, как правило, приводит к увеличению расхода энергии (например, топлива).
На фиг. 2 оптимальный профиль 22 движения накатом и торможения представлен в виде значений скорости транспортного средства для конкретных расстояний относительно точки «D» остановки. Сначала транспортное средство движется с относительно постоянной скоростью, что изображено в виде участка 24 прямой между значениями расстояния «A» и «B». В момент начала реакции оператора (например, за 2 секунды) до момента 26 отпускания педали газа, соответствующего расстоянию B, система подает запрос оператору о начале движения накатом, чтобы оператор отпустил педаль газа, а автомобильное транспортное средство начало движение накатом, что изображено в виде прямого участка 24A. Следует понимать, что автомобильное транспортное средство 1 может включать в себя стандартную педаль газа или другие средства подачи входного сигнала от водителя, которые позволят оператору управлять скоростью и ускорением транспортного средства. Момент 26 отпускания педали газа соответствует моменту, в котором транспортное средство, управляемое оператором, начинает движение накатом, используя средство для подачи входного сигнала оператором, установленное на конкретном используемом транспортном средстве.
В момент начала реакции оператора (например, за 2 секунды) до достижения расстояния «C», представленной в виде точки 30, система подает оператору запрос о торможении, чтобы оператор начал торможение транспортного средства, в результате чего транспортное средство станет замедляться, что изображено в виде участка 32 прямой, до тех пор, пока транспортное средство не остановится в точке 34, соответствующей расстоянию «D».
Контроллер 5 может быть выполнен с возможностью предоставления пользователю возможности выбора различных режимов работы. Например, участок 28A прямой на фиг. 2 может изображать режим НАКАТ С ТОРМОЖЕНИЕМ. В режиме НАКАТ С ТОРМОЖЕНИЕМ коробка передач остается в положении ВКЛЮЧЕННОЙ ПЕРЕДАЧИ («D»), если транспортное средство 1 включает в себя автоматическую коробку передач с положениями рычага селектора типа «Р-R-N-D-L» или аналогичными положениями для управления автоматической коробкой передач, а пользователь начинает торможение в точке 30, как было сказано выше. В дополнение к режиму НАКАТ С ТОРМОЖЕНИЕМ, контроллер 5 также может быть выполнен с возможностью обеспечения работы в режиме НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ, изображенном пунктирной линией 32B, и в режиме НАКАТ БЕЗ ТОРМОЖЕНИЯ, изображенном пунктирной линией 32C. В режиме НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ коробка передач переходит в режим работы на НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ, соответствующей положению «N» рычага переключения передач, а оператор дает транспортному средству 1 двигаться накатом до места остановки без какого-либо торможения. В режиме НАКАТ БЕЗ ТОРМОЖЕНИЯ коробка передач переходит или остается в режиме ВКЛЮЧЕННОЙ ПЕРЕДАЧИ (обычно соответствующей положению «D» рычага переключения передач для автоматической коробки передач), а транспортное средство может двигаться накатом до места остановки без торможения. Выбор режима движения накатом позволяет контроллеру 5 выбрать соответствующий показатель движения накатом (например, этап 84, фиг. 7) для режима работы коробки передач. Следует понимать, что режим НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ и режим НАКАТ БЕЗ ТОРМОЖЕНИЯ могут быть использованы оператором, если он хочет доехать накатом до места остановки без торможения, однако оператор также может при необходимости использовать торможение и (или) дополнительную энергию от двигателя (источника энергии) транспортного средства. Во время работы пользователь выбирает один из режимов НАКАТ С ТОРМОЖЕНИЕМ, НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ или НАКАТ БЕЗ ТОРМОЖЕНИЯ, а контроллер 5 подает оператору сигнал к началу движения накатом в одной из точек 26A, 26B или 26C, после чего оператор отпускает педаль газа и при необходимости переключает коробку передач в соответствии с выбранным режимом работы.
Настоящее изобретение предоставляет способ более эффективного управления транспортным средством в соответствии с оптимальным профилем движения накатом и торможения, например, профилем 22 на фиг. 2. Следует понимать, что оптимальный профиль 22 на фиг. 2 является примером оптимального профиля для конкретных водителя и транспортного средства при заданном местоположении остановки, но оптимальный профиль обычно является разным для различных транспортных средств, различных операторов и различных местоположений остановки и дорожных условий. Контроллер 5 (фиг. 1) может быть выполнен с возможностью генерировать сигнал оператору для начала движения накатом в точке 26, соответствующей расстоянию B. В качестве альтернативы контроллер 5 может быть выполнен с возможностью подачи сигнала оператору транспортного средства в точке 27, находящейся перед точкой 26 отпускания педали газа для компенсации задержки реакции водителя. Дополнительно контроллер 5 может быть выполнен с возможностью подачи оператору сигнала «торможение», когда транспортное средство находится в точке 30 торможения, соответствующей расстоянию C. Сигнал «торможение» является необязательным, поскольку водители могут самостоятельно увидеть знак остановки или другие местоположения остановки и начать торможение с целью замедления транспортного средства.
В обычном случае контроллер 5 и устройство 16 отображения могут быть выполнены с возможностью подачи визуального сигнала «движение накатом», например, текста «НАЧАТЬ ДВИЖЕНИЕ НАКАТОМ» и (или) стрелки, указывающей вниз, и (или) звукового сигнала, например, звонка или голосовой команды, в том числе, «начать движение накатом, впереди место остановки». Визуальные сигналы, например, текст «торможение», и (или) звуковые сигналы, например, «начать торможение, впереди место остановки», могут быть дополнительно поданы в точке 30, соответствующей расстоянию C на фиг. 2.
Как было сказано выше, профиль 22 движения накатом и торможения на фиг. 2 является примером оптимального решения, позволяющего достичь баланса между экономией топлива и сокращением времени до полной остановки. На фиг. 3-5 представлены примеры неоптимальных профилей движения наката и торможения, которых можно избежать при помощи способа в соответствии с настоящим изобретением. Например, профиль 36 на фиг. 3 представляет собой субоптимальный профиль, на котором движение накатом начинается в точке 38, соответствующей расстоянию «B1», после чего в точке 40, соответствующей расстоянию «C1», сразу же начинается торможение транспортного средства. Профиль 36 на фиг. 3 представляет собой ситуацию при позднем начале движения накатом, которое приводит к повышенному расходу топлива относительно оптимального профиля, представленного на фиг. 2. На фиг. 4 профиль 42 включает в себя точку 44, соответствующую расстоянию «B2», в которой начинается движение накатом. Оператор начинает торможение в точке 46, соответствующей расстоянию «C2».
Профиль 42 представляет собой ситуацию при позднем начале движения накатом, которая требует быстрого снижения скорости с сильным торможением. Быстрое снижение скорости может быть неудобным для пассажиров транспортного средства, а сильное торможение также может препятствовать отбору мощности в случае, если транспортное средство 1 является электрическим или гибридным транспортным средством, которое генерирует электрическую энергию во время торможения.
Профиль 48 на фиг. 5 включает в себя точку 50, в которой транспортное средство начинает движение накатом. Точка 50 соответствует расстоянию «B3». Однако в примере с фиг. 5 скорость транспортного средства снижается в соответствии с участком 52 прямой, что не позволяет транспортному средству достичь места остановки, соответствующего расстоянию «D3». Таким образом, для создания дополнительной мощности на участке 56 прямой с целью достижения транспортным средством точки 58, соответствующей расстоянию «D3», оператор транспортного средства должен нажать на педаль газа в точке 54, соответствующей расстоянию «C3». Профиль 48 на фиг. 5 является субоптимальным, поскольку для остановки необходимо дополнительное время. Кроме того, использование профиля 48 также может привести к повышенному расходу топлива по сравнению с оптимальным профилем 22 (фиг. 2).
На фиг. 6 представлен первый график 60 зависимости скорости транспортного средства от расстояния, который включает в себя оптимальный профиль 22A движения накатом и торможения, аналогичный оптимальному профилю 22, более подробно описанному выше со ссылкой на фиг. 2. На фиг. 6 также представлен второй график 62 зависимости времени от расстояния для транспортного средства, которое замедляется и останавливается в соответствии с профилем 22A. Как более подробно будет сказано ниже, в соответствии с настоящим изобретением способ может включать в себя определение предпочтительной точки остановки, представляющей собой время и (или) расстояние до остановки, осуществляемой пользователем (оператором).
Пример предпочтительного времени остановки представлен на фиг. 6 в виде пунктирной линии 64. Предпочтительное время остановки, соответствующее обычно приемлемому времени для оператора, может быть определено, исходя из данных об операторе. К таким данным можно отнести измеренные и записанные данные о конкретном пользователе, в противном случае указанные данные могут представлять собой измеренные данные о множестве операторов, усредненные или каким-либо иным образом объединенные для получения ожидаемого предпочтительного времени остановки. В качестве альтернативы данные о расстоянии до остановки могут быть также использованы для определения предпочтительного расстояния до остановки.
В общем случае предпочтительная точка, в которой должно быть начато движение накатом, может быть представлена либо в виде предпочтительного времени остановки, либо предпочтительного расстояния до остановки. Также определяется максимальное приемлемое время остановки, изображенное линией 66. Максимальное время, определенное из данных об операторе, соответствует максимальному времени (или расстоянию) остановки, которое является минимальным приемлемым для оператора. Период или интервал 68 времени между предпочтительным и приемлемым временем остановки может быть использован для определения расстояния «B» движения накатом и оптимального расстояния «C» торможения. На графике 62 зависимости времени от расстояния транспортное средство движется в соответствии с линией 76 и начинает движение накатом в точке 70. Торможение начинается в точке 72, а в точке 74 транспортное средство останавливается.
В соответствии с настоящим изобретением способ более подробно описан ниже со ссылкой на фиг. 7. На этапе 78 оператор (необязательно) выбирает один из режимов: НАКАТ С ТОРМОЖЕНИЕМ, НАКАТ БЕЗ ТОРМОЖЕНИЯ или НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ. Это может быть сделано с помощью устройства 14 ввода при движении транспортного средства между остановками, как на этапе 78A. Скорость транспортного средства может быть измерена с помощью датчика 18 скорости и (или) GPS-устройства 8 (фиг. 1).
В общем случае этапы 78 или 78A на фиг. 7 соответствуют работе транспортного средства до начала движения накатом или торможения, как показано участком 24 прямой (фиг. 2) и участком 24A прямой (фиг. 6). Таким образом, в дополнение к измерению скорости транспортного средства на этапе 78A контроллер 5 также определяет местоположения остановок на этапе 78B, определяет местоположение транспортного средства на этапе 78C и определяет расстояния остановки на этапе 78D. Этапы 78A, 78B, 78C и 78D могут выполняться непрерывно во время движения транспортного средства.
Контроллер 5 сравнивает текущее местоположение транспортного средства относительно местоположения остановок в базе данных с целью определения того, приближается ли транспортное средство 1 к месту остановки. Как изложено выше, контроллер 5 может быть выполнен с возможностью определять скорость и направление движения транспортного средства с целью установления того, приближается ли транспортное средство 1 к известному месту остановки. Контроллер 5 может быть выполнен с возможностью непрерывного определения скорости и местоположения транспортного средства и определения того, приближается ли транспортное средство к остановке.
Если контроллер 5 определяет, что транспортное средство 1 приближается к известному месту остановки, то контроллер на этапе 80 осуществляет поиск предпочтительного для пользователя времени до остановки относительно скорости транспортного средства (фиг. 7). Предпочтительное для пользователя время до остановки для заданной скорости транспортного средства может быть определено с помощью различных соответствующих методов.
Например, данное транспортное средство может использовать максимальную скорость торможения, соответствующую минимальному возможному времени до остановки для данного транспортного средства. Данное минимальное время до остановки может быть изменено в зависимости от дорожных условий (например, сухая или мокрая дорога, рыхлый грунт и т.д.) и уклона местности. И, наоборот, данное транспортное средство обычно будет иметь максимальное возможное время до остановки, соответствующее расстоянию, на котором транспортное средство начнет движение накатом до остановки в местоположении остановки (например, расстояние D, фиг. 2).
В течение максимального возможного времени до остановки для данного транспортного средства и скорости транспортное средство будет двигаться накатом до остановки без торможения. Следовательно, контроллер 5 может быть выполнен с возможностью определения минимального возможного времени до остановки и максимального возможного времени до остановки для данной измеренной скорости транспортного средства при приближении транспортного средства 1 к конкретному местоположению остановки. Минимальное время до остановки и максимальное время до остановки для данного транспортного средства могут быть определены эмпирическим путем, после чего эти данные могут быть сохранены в справочной таблице. Контроллер 5 может быть выполнен с возможностью считывания данных и их интерполяции (при необходимости) для получения минимального и максимального значений возможного времени до остановки для заданной скорости транспортного средства в заданном месте остановки с учетом дорожных условий, уклона дороги и других факторов.
Пользовательское устройство 14 ввода и устройство 16 отображения (фиг. 1) могут быть выполнены с возможностью подачи оператором входного сигнала для выбора предпочтительного времени до остановки. Например, оператору может быть подан запрос о выборе из диапазона значений, соответствующих относительно низкому расходу топлива и длительному времени до остановки (т.е. значения, близкие к максимальным возможным значениям времени до остановки) в качестве одного предела диапазона, а также предпочтительному времени до остановки с повышенным расходом топлива и уменьшенным временем до остановки (т.е. значения, близкие к минимальным возможным значениям времени до остановки).
С помощью устройства 14 ввода и (или) устройства 16 отображения оператор может ввести предпочтительное время до остановки. Соответственно, оператор может указать заранее заданное предпочтительное время до остановки. В контроллере 5 по умолчанию также может быть сохранено предпочтительное для пользователя время до остановки. Значение по умолчанию может быть определено эмпирическим путем измерения (наблюдения) предпочтительного времени до остановки для операторов транспортного средства. Кроме того, как изложено выше, оператор может выбрать один из заранее определенных режимов, в том числе, НАКАТ С ТОРМОЖЕНИЕМ (например, линия 28A, фиг. 2), НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ (например, линия 32B, фиг. 2) или НАКАТ БЕЗ ТОРМОЖЕНИЯ (например, линия 32C, фиг. 2). Контроллер 5 также может быть выполнен с возможностью измерения действительного времени до остановки для оператора (например, расстояния B и C на фиг. 2 во время работы), при этом данные предварительно измеренные и сохраненные профили времени до остановки могут быть использованы контроллером 5 для расчета предпочтительного для оператора времени до остановки как функции зависимости от скорости транспортного средства.
На фиг. 7 на этапе 82 максимальное приемлемое для оператора время до остановки для заданной скорости транспортного средства может быть считано из базы данных. Максимальное приемлемое для оператора время до остановки может быть введено оператором с помощью устройства 14 ввода и (или) устройства 16 отображения в ответ на запрос от устройства 16 отображения. Например, оператору может быть подан запрос о выборе максимального приемлемого для оператора времени до остановки из диапазона от очень малого времени до остановки до очень большого времени до остановки. Следует понимать, что максимальное приемлемое для оператора время до остановки не может превышать максимальное возможное время до остановки для данного транспортного средства.
На этапе 84 (фиг. 7) скорость движения накатом транспортного средства для ровной дороги определена путем поиска в базе данных эмпирически найденных значений. Как правило, показатель наката это замедление транспортного средства, движущегося накатом по ровной дороге, зависящего от скорости транспортного средства. Показатель наката также может изменяться в зависимости от того, находится ли (или будет ли находиться) коробка передач в положении «D» или «N», соответствующем режимам НАКАТ С ТОРМОЖЕНИЕМ, НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ и НАКАТ БЕЗ ТОРМОЖЕНИЯ.
На этапе 86 контроллер 5 определяет уклон дороги или маршрута с помощью GPS данных, а на этапе 88 он регулирует показатель наката в зависимости от уклона. Следует понимать, что данные об уклоне могут включать в себя спуск и (или) подъем дороги в различных точках по предполагаемому пути транспортного средства от текущего положения транспортного средства до предстоящего местоположения остановки, таким образом, показатель наката может изменяться в виде функции зависимости от скорости движения и местоположения транспортного средства.
На этапе 90 контроллер 5 вычисляет оптимальное расстояние для начала движения накатом и подает сигнал оператору для начала движения накатом. Примером оптимального расстояния является расстояние между расстояниями B и D на фиг. 2. Если оператор выбрал режим НАКАТ НА НЕЙТРАЛЬНОЙ ПЕРЕДАЧЕ или режим НАКАТ БЕЗ ТОРМОЖЕНИЯ, то оптимальное расстояние будет соответствовать расстояниям от точек 26B или 26C соответственно до точки D на фиг. 2. В общем случае оптимальное расстояние может быть вычислено с помощью предпочтительных для оператора значений времени до остановки, которые были предварительно установлены для данного оператора транспортного средства. Следует понимать, что контроллер 5 может сохранять данные о предпочтительном времени до остановки для нескольких операторов, при этом оператор сможет выбрать конкретное предпочтительное время до остановки с помощью устройства 14 ввода и (или) устройства 16 отображения. На этапе 90A оператор (пользователь) получает запрос о начале движения накатом в виде соответствующего сигнала, описанного ранее.
На этапе 92 (фиг. 7) на основании оптимальным скорости торможения может быть определено оптимальное расстояние для начала торможения. Примером оптимальным расстоянием является расстояние между точками C и D на фиг. 2. Дополнительно на этапе 92A контроллер 5 может подать оператору звуковой или визуальный сигнал для начала торможения. На этапе 94 (фиг. 7) контроллер 5 может отслеживать скорость замедления/торможения транспортного средства и подать сигнал оператору о том, что применяется необходимая степень торможения или что скорость торможения нужно уменьшить или увеличить. Например, при использовании оптимального профиля 22, показанного на фиг. 2, контроллер 5 может быть выполнен с возможностью непрерывного отслеживания действительной скорости торможения и сравнения измеренной скорости торможения/замедления с оптимальным скоростью торможения, представленной в виде участка 32 прямой. Контроллер 5 может подать сигнал оператору усилить торможение, если измеренная скорость торможения включает в себя точку, расположенную выше линии 32 и контроллер 5 может подать сигнал оператору ослабить торможение, если измеренная скорость торможения включает в себя точку, расположенную ниже оптимальным линии 32.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения и что сущность изобретения определена следующей формулой изобретения, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| СПОСОБ, СИСТЕМА И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ КОД ДЛЯ ОПТИМИЗАЦИИ РЕЙСА С ПОМОЩЬЮ ПОПОЛНЕНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ/ПУТЕЙ | 2007 |
|
RU2469387C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568151C2 |
| СПОСОБ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570855C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДКОЙ БАТАРЕИ И СПОСОБ УПРАВЛЕНИЯ ЗАРЯДКОЙ БАТАРЕИ ДЛЯ ЭЛЕКТРОМОБИЛЯ | 2010 |
|
RU2489779C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2013 |
|
RU2598874C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СИСТЕМА ОТОБРАЖЕНИЯ НА КАРТЕ АВТОМОБИЛЬНЫХ ПАРКОВОК (ВАРИАНТЫ) | 2016 |
|
RU2668361C1 |
Изобретение относится к способу оптимизации расхода топлива в транспортном средстве. Предложенный способ выдачи сигнала оператору автомобильного транспортного средства для оптимизации расстояния до остановки включает в себя определение скорости транспортного средства и определение предпочтительного времени до остановки на основании, по крайней мере частично, скорости транспортного средства. Максимальное приемлемое время до остановки определяется в зависимости, по крайней мере частично, от скорости транспортного средства. Сначала определяется показатель движения накатом транспортного средства, после чего определяется оптимальное расстояние для начала движения накатом. Способ также включает в себя выдачу сигнала оператору транспортного средства для начала движения накатом, когда транспортное средство находится на оптимальном расстоянии от местоположения остановки. Обеспечиваются эффективность использования топлива и плавное торможение транспортного средства. 2 н. и 7 з.п. ф-лы, 7 ил. 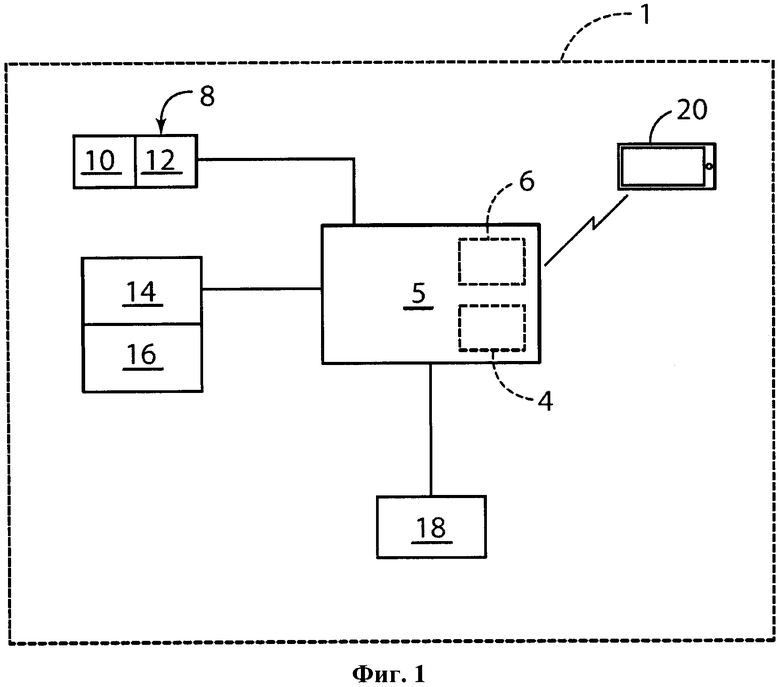
1. Способ сигнализации, основанный на GPS, оператору автомобильного транспортного средства, имеющему блок GPS, для оптимизации расстояния до остановки, содержащий этапы, на которых:
определяют скорость транспортного средства; определяют местоположение остановки;
определяют местоположение транспортного средства, используя блок GPS транспортного средства;
определяют предпочтительный параметр для выполнения остановки, при этом предпочтительный параметр для выполнения остановки содержит по крайней мере одно из предпочтительного времени до остановки и предпочтительного расстояния до остановки, на основании, по крайней мере частично, от скорости транспортного средства;
определяют максимальное приемлемое время и/или расстояние до остановки, на основании, по крайней мере частично, от скорости транспортного средства;
определяют показатель наката для транспортного средства;
определяют оптимальное расстояние от местоположения остановки для начала движения накатом;
выдают сигнал оператору транспортного средства для начала движения накатом, при этом сигнал выдают оператору, когда транспортное средство находится на оптимальном расстоянии или до начала движения накатом;
используют входной сигнал от оператора для определения по крайней мере одного из предпочтительного времени до остановки и предпочтительного расстояния до остановки;
выдают оператору запрос о вводе по крайней мере одного из предпочтительного времени до остановки и предпочтительного расстояния до остановки;
предоставляют оператору возможность ввести несколько значений, содержащих данные о времени до остановки и/или предпочтительном расстоянии до остановки,
выдают оператору запрос о выборе по крайне мере одного значения времени до остановки и/или по крайней мере одного значения предпочтительного расстояния до остановки;
при этом несколько вводимых значений содержат значение времени до остановки, включающее в себя диапазон значений времени до остановки, ограниченный минимальным и максимальным значениями времени до остановки.
2. Способ по п. 1, в котором обеспечивают оператора информацией о расходе топлива, соответствующем нескольким введенным значениям.
3. Способ по п. 1, в котором определение показателя наката для транспортного средства включает в себя получение данных о показателе наката, используя скорость транспортного средства.
4. Способ по п. 1, в котором оптимальное расстояние определяется на основании, по крайней мере частично, по крайней мере одного из предпочтительного времени до остановки и предпочтительного расстояния до остановки.
5. Способ по п. 1, который содержит определение оптимального расстояния от местоположения остановки для начала движения накатом.
6. Способ по п. 5, в котором обеспечивают оператора транспортного средства сигналом для начала движения накатом.
7. Способ по п. 1, в котором сигнал содержит по крайней мере одно из визуального индикатора и помехи.
8. Способ сигнализации, основанный на GPS, оператору автомобильного транспортного средства, имеющему блок GPS, для оптимизации расстояния до остановки, содержащий этапы, на которых:
определяют скорость транспортного средства; определяют местоположение остановки;
определяют местоположение транспортного средства, используя блок GPS транспортного средства;
определяют предпочтительный параметр для выполнения остановки, при этом предпочтительный параметр для выполнения остановки содержит по крайней мере одно из предпочтительного времени до остановки и предпочтительного расстояния до остановки, на основании, по крайней мере частично, от скорости транспортного средства;
определяют максимальное приемлемое время и/или расстояние до остановки, на основании, по крайней мере частично, от скорости транспортного средства;
определяют показатель наката для транспортного средства;
определяют оптимальное расстояние от местоположения остановки для начала движения накатом;
выдают сигнал оператору транспортного средства для начала движения накатом, при этом сигнал выдают оператору, когда транспортное средство находится на оптимальном расстоянии или до начала движения накатом;
обеспечивают оператору режим «нормальный накат», соответствующий движению накатом посредством автоматической трансмиссией транспортного средства в положении привода с последующим торможением в местоположении остановки;
обеспечивают оператору режим «нейтральный накат», соответствующий движению накатом посредством автоматической трансмиссией транспортного средства в положении нейтраль и при этом транспортное средство движется накатом до остановки в местоположении остановки без торможения;
обеспечивают оператору режим «полный накат», соответствующий движению накатом посредством автоматической трансмиссии транспортного средства в положении нейтраль и при этом транспортное средство движется накатом до остановки в местоположении остановки без торможения;
обеспечивают оператора вводной характеристикой, позволяющей оператору выбрать один из режимов «нормальный накат», «нейтральный накат» и «полный накат»; и
используют режим, выбранный оператором для определения показателя наката для транспортного средства, для определения того, когда обеспечить оператору сигнал начать движение накатом.
9. Способ по п. 8, в котором:
измеряют несколько скоростей транспортного средства и соответствующих расстояний, при которых оператор начитает движение накатом, когда приближается остановка; и
используют измеренные скорости транспортного средства и соответствующие расстояния для определения по крайней мере одного из предпочтительного времени до остановки и предпочтительного расстояния до остановки.
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНЫХ СРЕДСТВ | 2009 |
|
RU2445217C1 |
| US 8290697 B2, 16.10.2012 | |||
| WO 2009061687 A1, 14.05.2009 | |||
| US 20130131919 A1, 23.05.2013 | |||
| US 20110054768 A1, 03.03.2011 | |||
| СПОСОБ И СИСТЕМА ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2514610C2 |

