Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления и соответствующему устройству для намоточной машины для горячего и холодного продукта, используемой, согласно предпочтительному примеру, в области сталелитейной промышленности.
В частности, настоящее изобретение используется для контроля, регулирования и подачи команд для намотки металлических полуфабрикатов, поступающих из сталелитейных цехов, таких как пруток, проволока, трубчатые элементы и т.п., используемых, например, при изготовлении металлоконструкций, например, для получения армированного бетона или конструкций других типов.
Уровень техники
Известны намоточные машины (моталки), способные формировать бунты из горячих или холодных металлических полуфабрикатов, например, поступающих из сталелитейных цехов, или продуктов вторичной обработки, таких как пруток, проволока, трубчатые элементы и т.п.; далее в описании различные типы металлических изделий все будут именоваться термином «пруток».
Известно, что для определенных задач пруток обладает неоднородным рельефом поверхности, т.е. на поверхности имеются ребра и зоны утолщения, которые изменяют сечение прутка, даже непрерывным образом.
Также известно, что очень часто намотка производится еще в горячем или очень горячем состоянии прутка, и также известно, что в этих случаях сечение прутка чувствительно к изменениям температуры.
Известные намоточные машины могут содержать распределитель прутка, координированный с вращающимся барабаном, вокруг которого формируются витки бунта.
Известный барабан обычно содержит оправку, связанную с ограничительными элементами, которые определяют ширину бунта, и из которых по меньшей мере один выполнен с возможностью снятия для извлечения бунта.
Известны две основные конструкции намоточных машин: первая, в которой барабан находится в вертикальном положении, и вторая, в которой барабан находится в горизонтальном положении.
В обеих известных конструкциях распределитель прутка расположен с боковой стороны в положении, которое поддерживается, по существу, посередине оси барабана.
Распределитель обычно совершает ритмичное возвратно-поступательное движение в плоскости, которая предпочтительно содержит ось выхода распределителя, и также предпочтительно, хотя и не обязательно, ось барабана.
Согласно другому техническому решению, распределитель может совершать по меньшей мере одно движение в плоскости, которая, в каждом случае, когда происходит намотка, расположена по касательной к цилиндрической поверхности, которая имеет переменный диаметр и формируется осью барабана.
Распределителю можно задавать положение непрерывно вдоль ширины бунта и/или вдоль радиуса витка.
Чтобы управлять намоткой, согласно существующих техническим решениям, знания номинальных величин сечения прутка недостаточно, чтобы достаточно точно управлять формированием бунта, оптимизировать скорость заполнения и предотвратить образование перехлестов и/или пустых промежутков между соседними витками.
Следовательно, во время намотки известные устройства не способны оптимально координировать работу ни барабана, ни распределителя так, чтобы витки располагались требуемым образом, в частности под требуемым углом, применительно к вышеупомянутым параметрам оптимизации в зависимости от сечения и характеристик прутка.
Неправильное расположение витков во время намотки бунта порождает изъяны получаемого бунта, например, такие как пустые промежутки, недостаточное наполнение и перехлесты витков, частичные или полные.
Бунты, полученные при помощи известных устройств, в силу своего несовершенства имеют низкий коэффициент плотности витков, который определяется отношением фактического объема витков к общему объему бунта.
Большое количество дефектов бунтов, полученных при помощи известных устройств, наряду с низкой плотностью витков, делает непродуктивным также в смысле времени использование таких устройств для изготовления сеток, клеток, решеток, скоб и т.п.для конструкций армированного бетона или аналогичных конструкций.
В самом деле, известно, что в случае изделий, предназначенных для получения армированного бетона, бунты разматывают при помощи соответствующих машин, которые во время разматывания, если попадается дефект, должны быть остановлены, чтобы дать возможность оператору вмешаться в процесс.
Это приводит к потерям времени, которые замедляют производственный процесс, и требуют вмешательства оператора, увеличивая затраты, которые в силу конкурентности рынка, на котором продаются полученные изделия, при том же качестве должны оставаться минимально возможными, или во всяком случае ограниченными.
Для улучшения качества бунтов известны некоторые устройства, например, устройства контроля и регулировки кольцевого типа, с которыми взаимодействует система распределения прутка.
После того, как указанные известные устройства оказываются установленными и откалиброванными, они способны измерять некоторые параметры, включая, например, скорость распределения прутка, и также способны использовать собираемую информацию для контроля и управления намоткой бунта.
Однако, эти известные устройства не очень надежны при измерении параметров, которое осуществляется косвенным образом путем измерения натяжения и/или токов, индуцированных в кольце.
Это означает, что также не очень точным оказывается последующее регулирование скорости вращения барабана, и/или скорости перемещения и/или позиционирования распределителя.
Более того, указанные известные устройства не только не могут определять сечение прутка, но их необходимо постоянно координировать с распределителем, и при каждом случае их необходимо менять и/или адаптировать в соответствии с сечением прутка.
Известны намоточные устройства, применяемые, например, для электрических проводов или других подобных материалов, однако такие устройства невозможно адаптировать к управлению намоткой прутка, поскольку эти устройства не принимают во внимание ни изменчивость сечения продукта, который подлежит намотке, ни изменчивость указанного сечения в функции температуры.
В самом деле, во время намотки прутка сечение прутка в двух смежных витках может быть весьма различным, и витки могут располагаться отстоящими друг от друга с переменным шагом.
Это делает известные намоточные устройства, применяемые в других областях техники, непригодными в качестве устройств для намотки горячего и холодного металлического полуфабриката.
Например, в патентных документах.US 4,570,875 и US 6,443,385 раскрыты управляющие устройства, связанные с намоточным устройством для тросов однородного сечения, которые не адаптируют работу распределителя, и не координируют его с вращением барабана в функции изменения сечения троса и расстояния между двумя соседними витками, которое в данном случае всегда постоянное.
Поэтому существует необходимость в усовершенствовании уровня техники, и предложении способа управления намоточной машиной, а также соответствующего устройства, в которых будет устранен по меньшей мере один из недостатков, свойственных современным устройствам.
В частности, задача настоящего изобретения заключается в увеличении надежности прямого определения мгновенных параметров прутка, и на основе этого - в улучшении способа, которым осуществляется формирование бунта.
Другая задача настоящего изобретения состоит в увеличении точности регулирования барабана координированно с работой распределителя, чтобы получать требуемые положения как витков, так и слоев бунта, чтобы предотвратить возникновение дефектов и/или остаточного натяжения.
Еще одна задача заключается в том, чтобы устройство управления для намоточных машин, соответствующее настоящему изобретению, можно было применять к существующим намоточным машинам без необходимости замены и/или адаптации в соответствии с изменениями сечения прутка.
Настоящее изобретение было разработано, испытано и осуществлено в целях устранения недостатков, присущих устройствам из уровня техники, в целях решения указанных и иных задач и получения преимуществ.
Сущность изобретения
Настоящее изобретение сформулировано и охарактеризовано в независимых пунктах формулы изобретения, в то время как зависимые пункты формулы раскрывают другие характеристики изобретения или вариантов основной изобретательской идеи.
Настоящее изобретение относится к способу управления и устройству для намоточной машины, пригодным для усовершенствования управления прутком во время намотки бунта и для получения бунтов с улучшенными характеристиками.
Согласно указанным задачам изобретения, управляющее устройство для намоточной машины и соответствующий способ предусматривают использование, по меньшей мере, системы видеозаписи.
Система видеозаписи выполнена с возможностью сбора и обработки изображений распределения прутка при определенной скорости намотки.
Управляющее устройство после получения видеосигналов способно обрабатывать их и по возможности вмешиваться в рабочие параметры намоточной машины так, чтобы получать требуемый результат.
Согласно изобретению, система видеозаписи способна фокусироваться на прутке по меньшей мере на промежутке от выхода питателя или распределителя до барабана.
Согласно одному из вариантов, управляющее устройство выполнено с возможностью измерения от точки к точке, по меньшей мере в плоскости, содержащей ось распределителя, угла наклона прутка, образованный между осью питателя распределителя и мгновенной точкой намотки на барабане относительно номинального нуля.
Согласно одной из характерных особенностей настоящего изобретения, управляющее устройство для намоточной машины содержит средства, способные обрабатывать данные, получаемые во время намотки бунта, и вмешиваться в процесс намотки, по меньшей мере, координируя системы привода распределителя прутка и барабана, чтобы поддерживать требуемое значение угла наклона прутка.
Кроме того, согласно одному варианту, управляющее устройство координирует системы привода прутка и барабана, обеспечивая, как требуемое расстояние между витками, так и их радиальное положение на барабане.
Согласно другой характерной особенности настоящего изобретения, управляющее устройство может быть связано с существующими намоточными машинами, поскольку пригодно для работы и со всеми типами и размерами прутка, и также со всеми типами бунтов.
Согласно еще одной характерной особенности настоящего изобретения, управляющее устройство в предпочтительном варианте по меньшей мере содержит систему источников структурированного освещения, взаимодействующую с поверхностью прутка и/или с барабаном и/или распределителем.
Здесь и далее в описании имеется в виду, что термин «источник структурированного освещения» заключает в себе лазерный источник, светодиоды, лампу с подходящей распределительной решеткой и/или источник света другого типа пригодный для данной цели.
Система источников структурированного освещения пригодна для испускания одного или более лучей (световых пучков) структурированного освещения, которые пересекают поверхность прутка и/или барабана и/или распределителя.
Согласно первому варианту осуществления изобретения, система видеозаписи выполнена с возможностью обнаружения присутствия в определенном месте, луча/лучей структурированного освещения, получения параметров и взаимодействия с управляющим и командным блоком управляющего устройства.
Система источников структурированного освещения позволяет управляющему и командному блоку управляющего устройства задавать референсные пространственные координаты, которые можно использовать для обработки изображений, собираемых системой видеозаписи.
Согласно одному отличию настоящего изобретения, в способе управления в качестве параметров регулирования по меньшей мере используются скорость вращения барабана и скорость перемещения распределителя.
Согласно варианту, способ управления также позволяет осуществлять контроль и/или оптимизировать положение распределителя в направлении радиуса барабана.
Способ управления, соответствующий настоящему изобретению, позволяет определять надлежащие параметры для требуемого распределения прутка по барабану, и вычислять целесообразные изменения, которые можно было бы делать в соответствии с требуемым положением витков в зависимости от момента намотки бунта.
Краткое описание чертежей
Вышеупомянутые и другие отличительные признаки настоящего изобретения будут понятны из последующего описания некоторых вариантов осуществления, приведенных в качестве примеров, не носящих ограничительного характера, со ссылками на прилагаемые чертежи, среди которых:
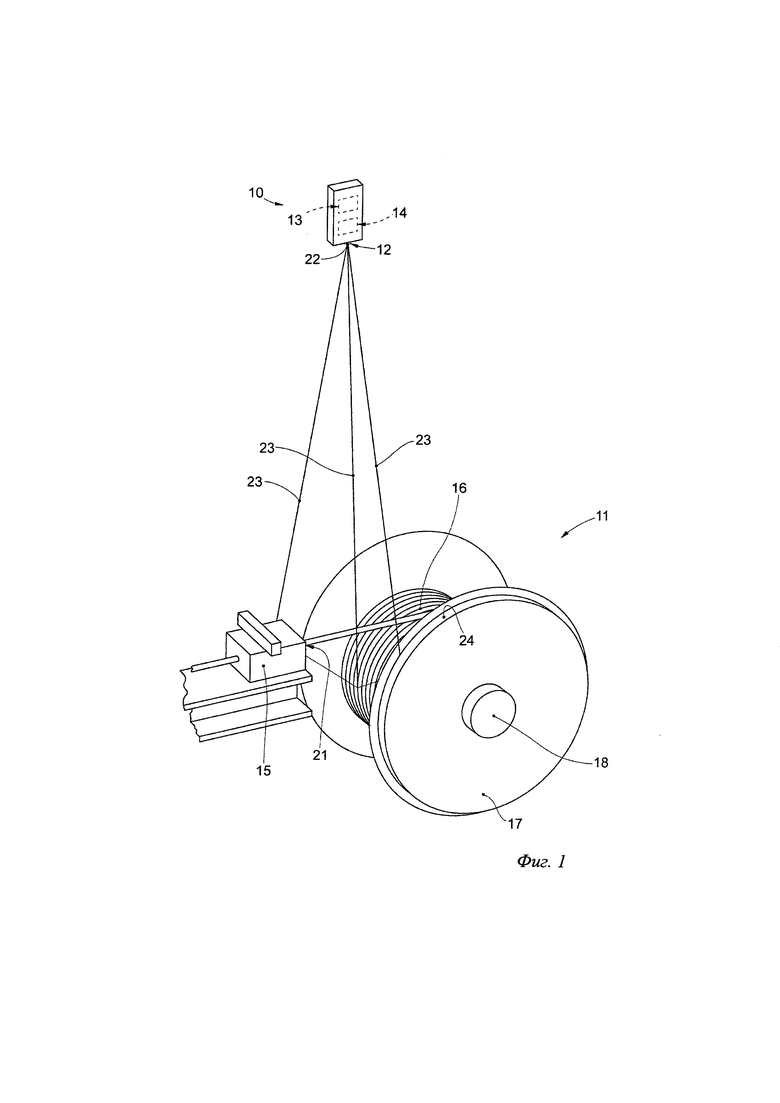
фиг. 1 в аксонометрии изображает управляющее устройство для намоточной машины согласно настоящему изобретению,
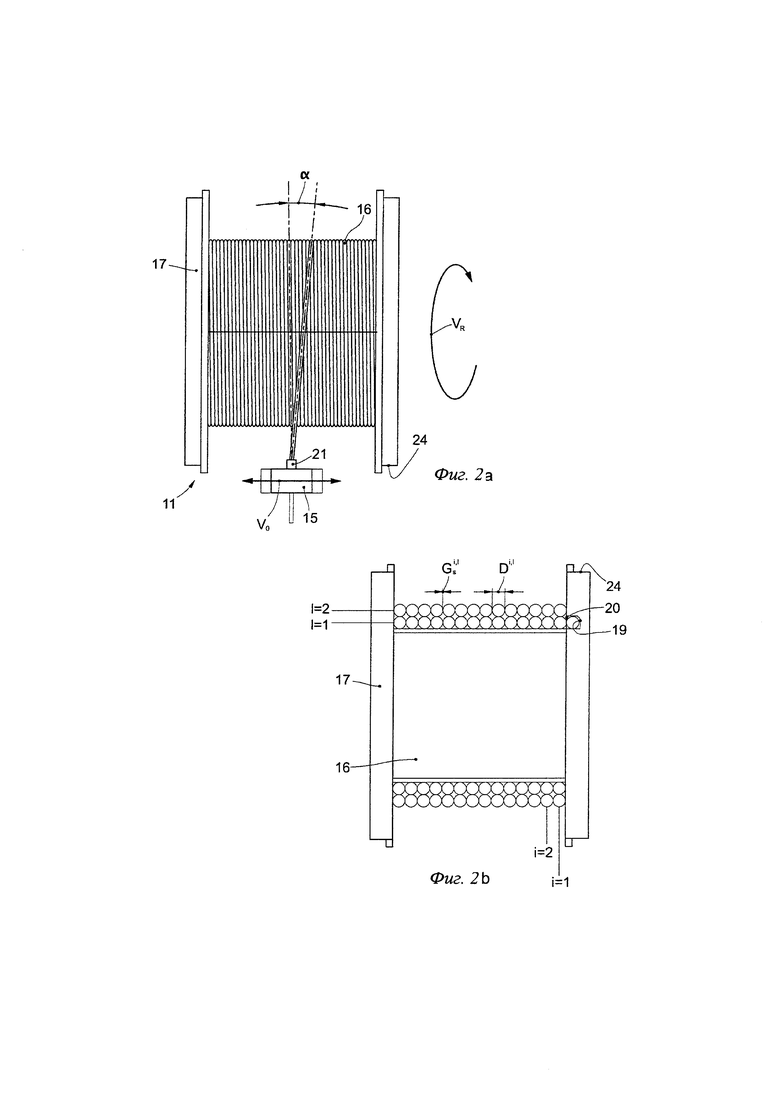
фиг. 2а представляет вид сверху фиг. 1, который демонстрирует поле зрения управляющего устройства для намоточной машины согласно настоящему изобретению,
фиг. 2b представляет сечение фиг. 2а, намоточной машины, взаимодействующей с управляющим устройством согласно настоящему изобретению,
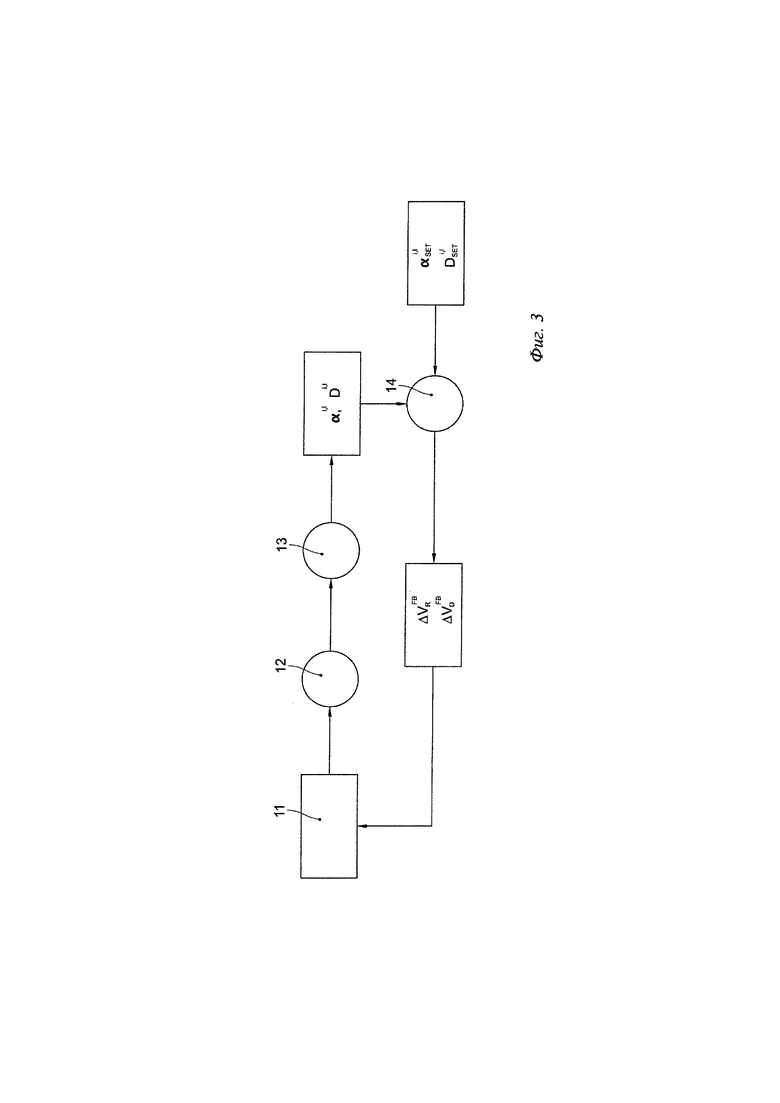
фиг. 3 представляет упрощенную блок-схему способа управления намоточной машиной согласно настоящему изобретению.
Для облегчения восприятия, везде, где возможно, для обозначения идентичных элементов на чертежах были использованы одинаковые позиционные номера. Следует понимать, что элементы и отличительные признаки одного варианта осуществления изобретения могут быть удобным образом включены в другие варианты осуществления без дополнительных пояснений.
Подробное раскрытие некоторых вариантов осуществления изобретения
Согласно фиг. 1, управляющее устройство 10, связанное с намоточной машиной 11, согласно настоящему изобретению содержит по меньшей мере систему 12 видеозаписи, обрабатывающий и вычислительный блок 13 и управляющий и командный блок 14.
Намоточная машина 11 содержит распределитель 15 прутка, связанный и координируемый с барабаном 16.
Распределитель 15 и барабан 16 согласованы и расположены известным образом, чтобы их можно было соответственно приводить в движение при помощи специальных средств перемещения и вращения, которые можно регулировать требуемым и управляемым образом.
Барабан 16 соединен на своих двух концах с ограничительными элементами 17 или фланцами, взаимодействующими с оправкой 18, которые не только заключают между собой бунт и поддерживают его, но также позволяют задавать его размеры.
Кроме того, один из ограничительных элементов 17 можно снимать, чтобы извлекать полученный бунт.
Предпочтительно, в по меньшей мере одном из указанных ограничительных элементов 17 имеется специальное посадочное гнездо 19, связанное со средствами 20 крепления одного конца прутка, чтобы подготавливать пруток к началу намотки.
В этом случае распределитель 15 может перемещаться параллельно оси оправки 18 вдоль бокового промежутка между ограничительными элементами 17.
Согласно одному из вариантов осуществления (не показан), распределитель 15 выполнен с возможностью позиционирования в каждом случае также относительно определенного наматываемого слоя.
В частности, распределитель 15 подает пруток непрерывно, требуемым и управляемым образом с выхода питателя 21 к барабану 16, помещая пруток постепенно на требуемые поверхности параллельные оси барабана 16.
Согласно изобретению, перемещение распределителя 15 осуществляется так, чтобы сохранять выход питателя 21 обращенным к определенной поверхности, на которой временно производится действие во время намотки бунта.
Система 12 видеозаписи работает совместно с обрабатывающим и вычислительным блоком 13 и управляющим и командным блоком 14, которые могут быть расположены вблизи системы 12 видеозаписи или на удалении от системы 12. В частности, обрабатывающий и вычислительный блок 13 и управляющий и командный блок 14 могут являться автономными компонентами, специально приспособленными для управления системой намотки, или они могут быть частями общего управляющего блока, который также управляет устройствами, расположенными перед намоточной машиной и/или после намоточной машины, и взаимодействует с намоточной машиной.
Согласно варианту осуществления изобретения, система 12 видеозаписи также взаимодействует с системой 22 источников структурированного света, выполненной с возможностью формирования одного или более лучей 23 структурированного света, которые пересекают поверхность прутка и/или поверхность барабана 16 и/или поверхность распределителя 15, и могут быть обнаружены системой 12 видеозаписи.
В частности, луч или лучи 23 структурированного света, которые согласно примеру, не носящему ограничительного характера, могут представлять собой лазерные лучи, светодиодные лучи или лучи источника другого типа, взаимодействуют с поверхностью прутка и/или поверхностью распределителя 15 и/или поверхностью барабана 16, а в особом предпочтительном случае - взаимодействуют с по меньшей мере наружной поверхностью 24 по меньшей мере одного из ограничительных элементов 17.
Система 22 источников структурированного света, взаимодействуя с по меньшей мере одной системой 12 видеозаписи, позволяет управляющему устройству 10 определять референсные пространственные координаты, которые можно использовать для обработки изображений, собираемых системой 12 видеозаписи. При этом также можно связывать управляющее устройство 10 с существующими намоточными машинами 11, которые оснащены барабаном 16, расположенным как в горизонтальном, так и в вертикальном или наклонном положении.
Система 12 видеозаписи включает в себя средство захвата изображений, например, такое, как детектор изображений на основе прибора с зарядовой связью (ПЗС) или иное подобное устройство.
Чтобы располагать полем зрения, пригодным для определения рабочих параметров намотки, система 12 видеозаписи фокусируется на прутке, по меньшей мере - на его выходе из питателя 21 к барабану 16.
Кроме того, система 12 видеозаписи выполнена с возможностью сбора изображений со скоростью, координированной с требуемой скоростью намотки.
Обрабатывающий и вычислительный блок 13, например, состоящий из интегральных схем и/или микропроцессоров, выполняет обработку изображений, собранных системой 12 видеозаписи, чтобы получить один или более рабочих параметров намотки.
Согласно одному из вариантов осуществления изобретения, обрабатывающий и вычислительный блок 13 выполнен с возможностью измерения по меньшей мере угла α наклона прутка - измерения по точкам в плоскости, содержащей ось распределителя 15.
Угол α наклона прутка определяют между осью питателя распределителя 15 и мгновенной точкой намотки на барабане 16 относительно номинального нуля.
Согласно варианту осуществления изобретения, обрабатывающий и вычислительный блок 13 выполнен с возможностью измерения по точкам эквивалентного диаметра сечения прутка во время намотки.
Управляющий и командный блок 14, например, состоящий из интегральных схем и/или микропроцессоров, взаимодействующих с соответствующими исполнительными органами, соответственно связан при помощи средств перемещения и вращения с распределителем 15 и барабаном 16 посредством специальных соединений и/или удаленных командных систем (не показаны).
Также, после того, как рабочие параметры намотки будут обработаны, управляющий и командный блок 14 может проверить, что указанные параметры являются теми параметрами, какие требуются в соответствии с определенным моментом намотки.
Если имеет место расхождение между измеренными рабочими параметрами и требуемыми параметрами, управляющий и командный блок 14 корректирует рабочие скорости распределителя 15 и барабана 16 координированным образом.
Согласно одному из вариантов осуществления изобретения, способ, соответствующий управляющему устройству 10 для намоточной машины 11, содержит по меньшей мере:
- шаг позиционирования управляющего устройства 10 относительно намоточной машины 11, размещения системы 12 видеозаписи, так чтобы она была сфокусирована на прутке по меньшей мере на участке от выхода питателя 21 до барабана 16,
- возможный шаг выставления системы 22 источников структурированного освещения так, чтобы задать ориентацию системы 12 видеозаписи по отношению к распределителю 15 и/или барабану 16,
- возможный шаг начального позиционирования и зажатия прутка, поступающего от распределителя 15, в посадочном гнезде 19, связанном со средствами 20 крепления,
- шаг ввода в управляющий и командный блок 14 данных требуемых референсных рабочих параметров намотки,
- шаг сбора изображений от системы 12 видеозаписи во время намотки бунта, при этом сбор изображений скоординирован со скоростью намотки,
- шаг обработки изображений и вычисления полученных рабочих параметров посредством обрабатывающего и вычислительного блока 13,
- шаг контроля путем сравнения полученных рабочих параметров с референсными рабочими параметрами, которые были ранее ведены в управляющий и командный блок 14,
возможный шаг преобразования возможных различий между требуемыми рабочими параметрами намотки и обнаруженными параметрами в соответствующие скоординированные изменения перемещения распределителя 15 и/или скорости вращения барабана 16.
Согласно изобретению, в способе управления используется алгоритм для вычисления скорости средства перемещения (привода) распределителя 15 и скорости вращения барабана 16, как необходимо по точкам во время намотки, в зависимости от требуемого положения витка и слоя бунта.
Алгоритм может быть в итоге представлен следующими функциональными выражениями:
VR=f1(VRi,1,ΔVRFB)
VD=f2(VDi,1,ΔVDFB)
где:
- f1 и f2 - это две функциональные зависимости, которые связывают скорости движения распределителя 15 и барабана 16; с параметрами, заключенными в круглые скобки,
- индекс i и индекс I относятся соответственно к i-му обороту при намотке, и 1-му слою бунта,
- VR - скорость вращения барабана 16,
- VD - скорость средства перемещения распределителя 15,
- VRi,I - скорость вращения барабана 16, соответствующая i-му обороту 1-го слоя,
- VDi,I - скорость средства перемещения распределителя 15, соответствующая i-му обороту 1-го слоя,
- ΔVRFB - изменение скорости вращения барабана 16, пропорциональное разнице между введенными требуемыми рабочими параметрами намотки и обнаруженными рабочими параметрами,
- ΔVDFB - изменение скорости средства перемещения распределителя 15, пропорциональное разнице между введенными требуемыми рабочими параметрами намотки и обнаруженными рабочими параметрами,
Согласно изобретению, для каждого требуемой операции намотки существует по меньшей мере одно конкретное соотношение между витком в i-м положении и слоем в I-м положении, и по меньшей мере один рабочий параметр, например, угол α наклона прутка.
Указанное соотношение определяется данными, которые были введены в управляющий и командный блок 14, и могут быть определены соответствующей калибровкой.
Параметр VDi,I зависит на i-м обороте и в I-м слое от параметра VRi,I и эквивалентного диаметра Di,I прутка, отстоящего от предыдущего витка на расстояние Gsi,I.
Согласно изобретению, существует зависимость между параметром Gsi,I и скоростью (VD) средства перемещения распределителя 15, а также скоростью (VR) вращения барабана 16.
Вследствие этого, поскольку существует соотношение между скоростями VR и VD и углом α наклона прутка, можно контролировать параметр Gsi,I, который определяет требуемое положение витков. Контроль параметра Gsi,I осуществляют путем измерения угла наклона α. Существует возможность изменения параметров Gsi,I в соответствии с каждым оборотом i и каждым слоем I путем вмешательства в скорости движения средства перемещения распределителя 15 и барабана 16.
Изменения ΔVRFB и ΔVDFB скоростей определяют непрерывно во время намотки бунта, чтобы предотвратить образование дефектов и/или остаточного натяжения, и получить требуемое положение витков при каждом i-м обороте и в каждом I-м слое.
Фиг. 3 изображает блок-схему, которая дает пример способа управления намоточной машиной 11 в соответствии с настоящим изобретением.
В данном примере угол αSETi,I наклона и эквивалентный диаметр DSETi,I металлического полуфабриката на i-м обороте и в I-м слое вводят в качестве референсных рабочих параметров намотки.
Способ, представленный в упрощенном виде на фиг. 3, предусматривает изначально шаг ввода референсных требуемых рабочих параметров в управляющий и командный блок 14.
Система 12 видеозаписи принимает изображения во время намотки бунта и передает их в обрабатывающий и вычислительный блок 13.
Обрабатывающий и вычислительный блок 13 непрерывно производит вычисление рабочих параметров и передает их в управляющий и командный блок 14.
Управляющий и командный блок 14 производит сравнение полученных параметров с ранее введенными референсными рабочими параметрами.
Если имеется различие между референсными рабочими параметрами и полученными рабочими параметрами, то управляющий и командный блок 14 преобразует указанные различия в соответствующие координированные изменения движения распределителя 15 и/или скорости вращения барабана 16 (ΔVRFB и ΔVDFB). Управляющий и командный блок 14 может давать команды распределителю 15 и/или барабану 16, изменяя соответственно скорости их перемещения и вращения.
Процесс повторяется для каждого i-го оборота и каждого I-го слоя, пока намотка бунта не будет закончена.
Следует понимать, что в границах идеи и объема настоящего изобретения в него могут быть внесены изменения и/или сделаны добавления в рассмотренные выше управляющее устройство для намоточной машины и в соответствующий способ.
Также следует понимать, что, хотя настоящее изобретение было раскрыто со ссылками на конкретные примеры, специалисты в данной области несомненно могут получить множество других эквивалентных форм управляющего устройства для намоточной машины и соответствующего способа, обладающих характеристиками, приведенными в формуле изобретения, и, следовательно, входящих в объем правовой охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОТЖИГА С ИСПОЛЬЗОВАНИЕМ ИНДУКЦИОННОГО НАГРЕВА СТАЛИ В БУНТАХ | 1997 |
|
RU2133289C1 |
| УСОВЕРШЕНСТВОВАННАЯ КОНВЕЙЕРНАЯ НАМОТОЧНАЯ УСТАНОВКА ДЛЯ КАТАНОГО МАТЕРИАЛА | 2004 |
|
RU2353454C2 |
| МОТАЛКА ДЛЯ МЕТАЛЛИЧЕСКОЙ КАТАНКИ ИЛИ ТЯНУТОЙ ПРОВОЛОКИ И/ИЛИ ПРУТКА | 2006 |
|
RU2355495C1 |
| НАМОТОЧНАЯ МАШИНА ДЛЯ НАМОТКИ НЕСКОЛЬКИХ РУЛОНОВ ПРОКАТАННОГО МАТЕРИАЛА ВОКРУГ ОДНОГО БАРАБАНА | 2015 |
|
RU2668369C2 |
| Устройство для управления моталкой сортового стана | 1986 |
|
SU1357199A1 |
| УСТАНОВКА ДЛЯ ОТЖИГА ТВЧ КАЛИБРОВАННОЙ СТАЛИ | 1992 |
|
RU2037537C1 |
| Устройство управления моталкой сортового стана | 1984 |
|
SU1199335A1 |
| Устройство для регулирования скорости при намотке мелкосортного проката | 1980 |
|
SU893287A1 |
| Способ регулирования скорости моталки проката | 1980 |
|
SU893289A1 |
| Способ намотки мелкосортногопРОКАТА B буНТы | 1979 |
|
SU835559A1 |
Группа изобретений относится к области намотки длинномерных материалов. Намоточная машина содержит распределитель, барабан и управляющее устройство. Управляющее устройство содержит систему видеозаписи, обрабатывающий и вычислительный блок, управляющий и командный блок. Система видеозаписи получает изображения металлического полуфабриката. Обрабатывающий и вычислительный блок выполнен с возможностью обработки изображений и непрерывного вычисления эквивалентного диаметра полуфабриката и угла наклона. Угол наклона образован между осью выхода питателя и мгновенной точки намотки полуфабриката на барабане. Управляющий и командный блок управляет полученными параметрами с помощью ранее введенных референсных значений рабочих параметров. Управляющий и командный блок выдает координированные команды средствам перемещения и вращения распределителя и барабана. При осуществлении способа управления вводят в управляющий и командный блок данные референсных рабочих параметров намотки. Собирают изображения в координации со скоростью намотки. Обрабатывают изображения и вычисляют рабочие параметры. Сравнивают полученные параметры с референсными. Преобразуют отличия в координированные изменения скоростей перемещения распределителя и вращения барабана. Регулируют скорости перемещения распределителя и вращения барабана. Обеспечивается точность регулирования. Предотвращается возникновение дефектов и остаточного напряжения. Отсутствует необходимость адаптации при изменении сечения полуфабриката. 2 н. и 4 з.п. ф-лы, 4 ил.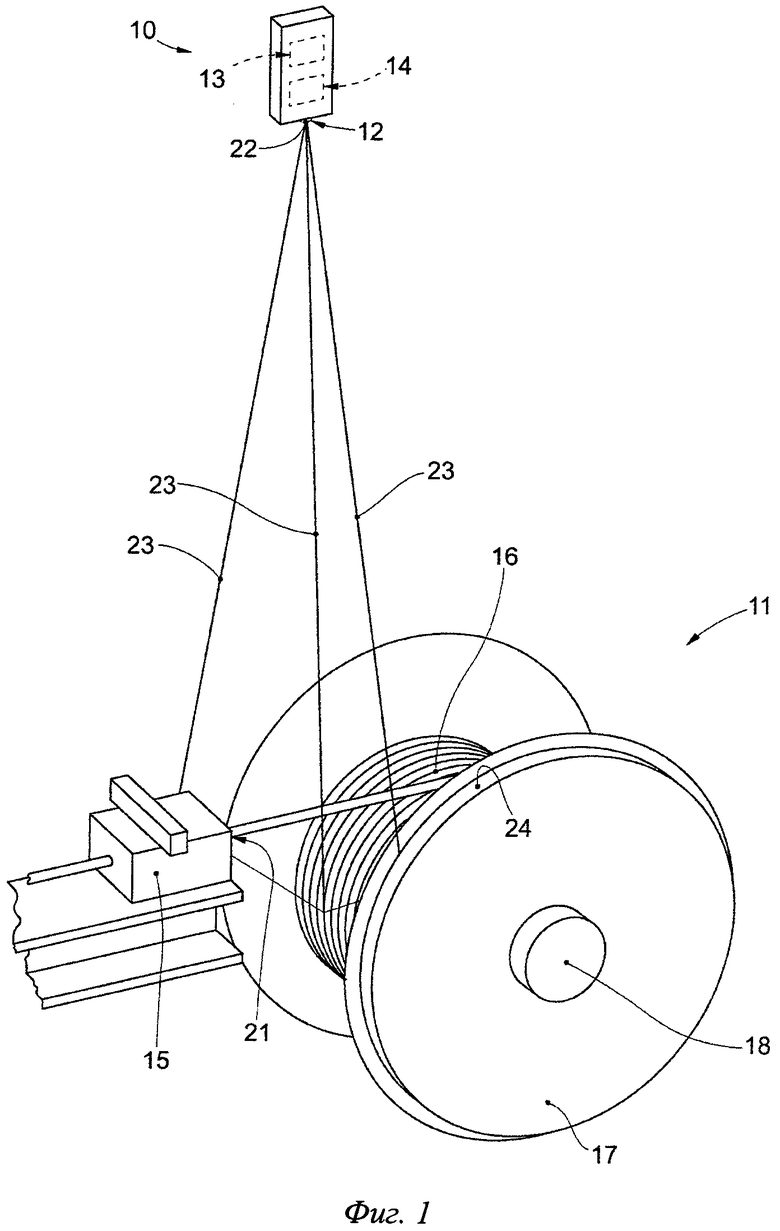
1. Способ управления для намоточной машины (11), оснащенной распределителем (15), в котором имеется по меньшей мере выход питателя (21) горячих или холодных металлических полуфабрикатов, барабаном (16) и управляющим устройством (10), содержащим систему (12) видеозаписи, сфокусированную на указанном металлическом полуфабрикате, причем указанный распределитель (15) и указанный барабан (16) соответственно приводят в движение подходящими управляемыми средствами перемещения и вращения, отличающийся тем, что указанный способ управления содержит:
- шаг ввода в управляющий и командный блок (14) указанного управляющего устройства (10) данных референсных рабочих параметров намотки, причем указанными референсными рабочими параметрами по меньшей мере являются требуемый угол (αSETi,l) наклона и эквивалентный диаметр (DSETi,l) указанного металлического полуфабриката для i-го оборота барабана (16) и I-го слоя формируемого бунта, при этом указанный угол (αSETi,l) наклона определяют между осью указанного выхода из питателя (21) и мгновенной точкой намотки указанного металлического полуфабриката на указанном барабане (16),
- шаг сбора изображений из указанной системы (12) видеозаписи во время намотки, при этом сбор изображений координируют со скоростью намотки,
- шаг обработки изображений и непрерывного вычисления по меньшей мере рабочих параметров (αi,l, Di,l) посредством обрабатывающего и вычислительного блока (13) управляющего устройства (10), причем указанными рабочими параметрами по меньшей мере являются указанный угол (αi,l) наклона и указанный эквивалентный диаметр (Di,l) металлического полуфабриката,
- шаг сравнения указанных рабочих параметров (αi,l, Di,l), полученных из собранных изображений, с указанными референсными рабочими параметрами (αSETi,l, DSETi,l), введенными в управляющий и командный блок (14),
- шаг преобразования возможных отличий между указанными референсными рабочими параметрами (αSETi,l, DSETi,l) и указанными полученными рабочими параметрами (αi,l, Di,l) в координированные изменения (ΔVRFB, ΔVDFB) скорости (VD) перемещения указанного распределителя (15) и/или скорости (VR) вращения барабана (16),
- шаг координированного регулирования скорости (VD) перемещения указанного распределителя (15) и скорости (VR) вращения барабана (16).
2. Способ управления по п. 1, отличающийся тем, что он содержит по меньшей мере шаг калибровки указанных рабочих параметров (ai,l, Di,l) намотки по меньшей мере при скорости (VDi,l) перемещения указанного распределителя (15) и скорости (VRi,l) вращения указанного барабана (16) для каждого оборота (i) и каждого слоя (I) намотки бунта.
3. Способ управления по п. 1 или 2, отличающийся тем, что для контроля и/или регулирования скорости (VD) перемещения указанного распределителя (15) и скорости (VR) вращения указанного барабана (16) принимают по меньшей мере одно из следующих функциональных соотношений:
VR=f1(VRi,l,ΔVRFB),
VD=f2(VDi,l,ΔVDFB),
где f1 и f2 - две функциональные зависимости, которые связывают скорости движения распределителя (15) и барабана (16);
индекс (i) и индекс (I) соответственно обозначают i-й оборот при намотке и I-й слой бунта;
VR - скорость вращения указанного барабана (16);
VD - скорость средства перемещения указанного распределителя (15);
VRi,l - скорость вращения указанного барабана (16), соответствующая i-му обороту I-го слоя;
VDi,l - скорость средства перемещения указанного распределителя (15), соответствующая i-му обороту I-го слоя;
ΔVRFB - изменение скорости вращения указанного барабана (16), пропорциональное разнице между референсными рабочими параметрами намотки и обнаруженными рабочими параметрами;
ΔVDFB - изменение скорости средства перемещения указанного распределителя (15), пропорциональное разнице между референсными рабочими параметрами намотки и обнаруженными рабочими параметрами.
4. Способ управления по п. 3, отличающийся тем, что указанная скорость (VDi,l) перемещения и указанная скорость (VRi,l) вращения являются взаимозависимыми, причем указанная скорость (VDi,l) перемещения также зависит от расстояния (GSi,l) между указанным эквивалентным диаметром (Di,l) и предыдущим эквивалентным диаметром (Di-1,l).
5. Способ управления по п. 4, отличающийся тем, что указанное расстояние (GSi,l) зависит от указанного угла (αi,l) наклона.
6. Управляющее устройство для намоточной машины (11), оснащенной распределителем (15), в котором имеется по меньшей мере один выход питателя (21) горячих или холодных металлических полуфабрикатов, и барабаном (16), соответственно приводимыми в движение подходящими управляемыми средствами перемещения и вращения, причем указанное управляющее устройство содержит систему (12) видеозаписи, выполненную с возможностью получения изображений указанного металлического полуфабриката, отличающееся тем, что указанное управляющее устройство содержит:
- обрабатывающий и вычислительный блок (13), выполненный с возможностью обработки указанных изображений и непрерывного вычисления эквивалентного диаметра (Di,l) указанного металлического полуфабриката и угла (αi,l) наклона, образованного между осью указанного выхода питателя (21) и мгновенной точкой намотки металлического полуфабриката на указанном барабане (16),
- управляющий и командный блок (14), выполненный с возможностью управления указанными полученными рабочими параметрами (αi,l, Di,l) с помощью ранее введенных референсных рабочих параметров (αSETi,l, DSETi,l), и с возможностью выдачи координированных команд указанным средствам перемещения и вращения указанного распределителя (15) и указанного барабана (16).
| Экономайзер | 0 |
|
SU94A1 |
| US 6443385 B1, 03.09.2002 | |||
| Способ получения ди(галоидфенил) хлоралкилфосфитов | 1976 |
|
SU602504A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| Устройство для управления намоткой многослойных электрических катушек | 1985 |
|
SU1350096A1 |
| US 4570875 A1, 18.02.1986. | |||

