о
CD СО
фие.{
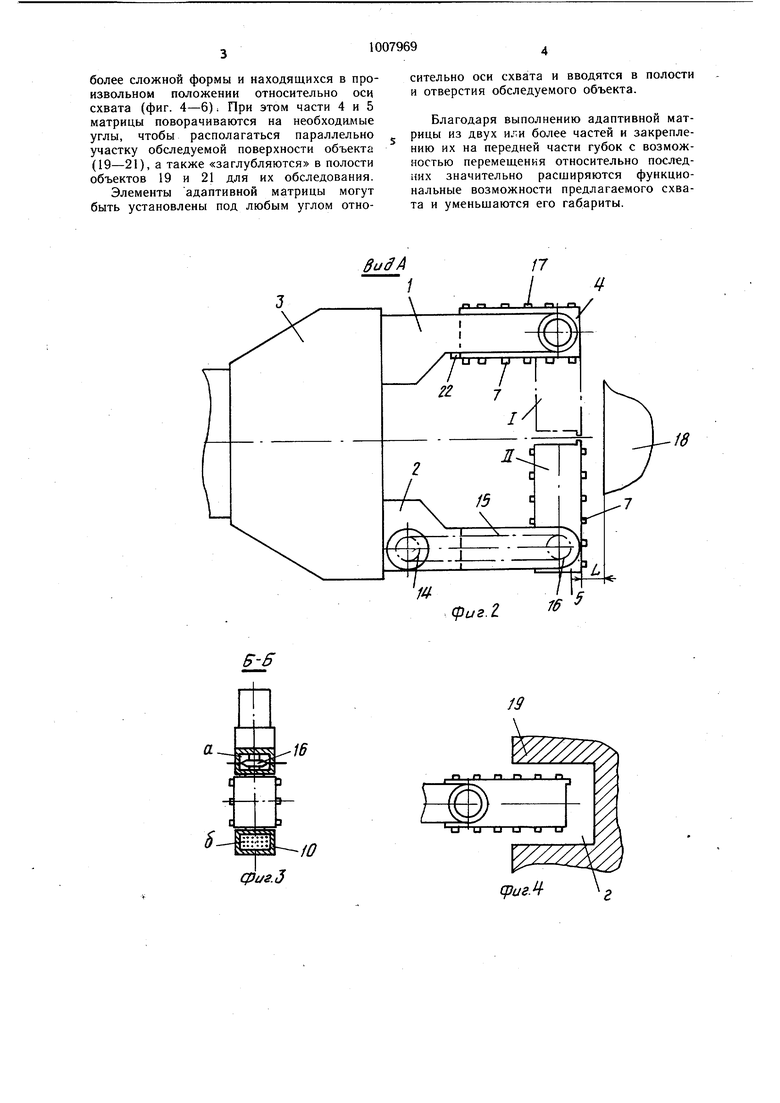
-г Изобретение относится к машиностроению, в частности к промышленным роботам-манипуляторам, предназначенным для механизации и автоматизации производственных процессов. Известен схват робота-манипулятора, содержаший запястье, губки с установленными на них датчиками, адаптивную матрицу с расположенными на ней датчиками расстояния и установленную перед губками схвата с возможностью перемешения относительно последних. В известной конструкции схвата адаптивная матрица закреплена на поворотном кронштейне, сочлененном с запястьем и снабженном приводом поворота 1. Недостатками данного схвата являются ограниченные функциональные возможности и увеличенные габариты: датчики матрицы используются только при ее положении перед губками схвата и дают информацию лишь о фронтальной поверхности объекта манипулирования, а нахождение матрицы в исходном (верхнем) положении вь1зывает увеличение габаритов схвата. Цель изобретения - уменьшение габаритов и расширение функциональных возможностей за счет получения информации об объекте, находяшемся в плоскостях, отличных от фронтальной. Указанная цель достигается тем, что в схвате робота-манипулятора, содержашем запястье, губки и адаптивную матрицу, на которой установлены датчики, адаптивная матрица разделена на части, число которых соответствует числу губок, при этом на каждой губке выполнен паз, а каждая часть адаптивной матрицьг шарнирно связана с соответствуюш.ей губкой и установлена с возможностью размещения в пазу. Кроме того, каждая часть адаптивной матрицы снабжена приводом, расположенным на губке. При этом датчики расположены на обеих сторонах каждой части адаптивной матрицы. На фиг. 1 показан предлагаемый схват, общий вид; на фиг. 2 -. вид по стрелке А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4-6 - возможные положения частей адаптивной матрицы. Губки 1 и 2 имеют вильчатую конструкцию. «Вилки губок имеют коробчатое сечение с полостями а и б (фиг. 3). Запястье 3 несет на себе механизм привода губок (не показан). В пазах между «вилками губок шарнирно установлены части 4 и 5 адаптивной матрицы, имеющие возможность поворачиваться на полых валах 6 относительно губок 1 и 2. Части 4 и 5 матрицы содержат на внутренней стороне сенсорные датчики, например датчики 7 расстояния. На передних частях губок 1 и 2 распложены приводы поворота матриц, выполненные например, в виде электродвигателей 8 и редукторов 9, через полые валы 6 и полости «вилок губок 1 и 2 пропущены провода 10 к датчикам 7 и электродвигателям 8. Приводы частей матрицы расположены на задней части губок и включают электродвигатели 11 и редукторы 12, на выходных валах 13 которых закреплены элементы трансмиссии, выполненные, например, в виде звездочек 14 (фиг. 1), сопрягаемых с цепями 15 (фиг. 2), которые, в свою очередь, сопрягаются со звездочками 16, сидящими на валах 6 (фиг. 3). В другом варианте исполнения части 4 и 5 матриц дополнительно снабжены датчиками 17, расположенными с наружной стороны матриц. Позициями 18-21 обозначены объекты взаимодействия со схватом. Объекты 19 и 21 манипулирования содержат соответственно полости гид.. Части 4 и 5 могут быть установлены и зафиксированы в любом заданном промежуточном положении (фиксирующие и отсечные механизмы не показаны). Позициями I и II обозначено положение обоих элементов матрицы перед поиском объекта манипулирования. Схват работает следующим образом. При включении поискового режима или при работе от программы схват приходит в заданное положение на расстоянии L между объектом 18 и частями 4 и 5 матрицы. Пусть ось объекта 18 несколько смещена относительно своего номинального положения в горизонтальном направлении. Датчики 7 матрицы определяют расстояние до соответствующих точек объекта 18 и создают обобщенный образ его фронтальной поверхности. В памяти ЭВМ, с которой взаимодействует робот-манипулятор, хранится истинный образ данного объекта и вследствие его несовпадения с образом, формируемым элементами матрицы, система управления вырабатывает сигнал рассогласования, который выдает команду на исполнительные механизмы робота-манипулятора с целью сведения его к нулю. После этого оси схвата и объекта 18 в вертикальной плоскости совпадают. Аналогично сводятся к нулю смещения по другим координатам. После этого вырабатывается команда на включение приводов элементов матрицы и они поворачиваются на валах 6 в рабочее положение (когда каждый из них входит в проем соответствующей губки 1 и 2 и буртиком 22 упирается в ее внутреннюю поверхность). Затем схват движется в сторону объекта 18 на необходимое расстояние, после чего происходит захват и перемещение объекта обычным путем. В варианте исполнения с расположением датчиков 7 на обеих сторонах частей 4 и 5 матрицы возможно обследование объектов
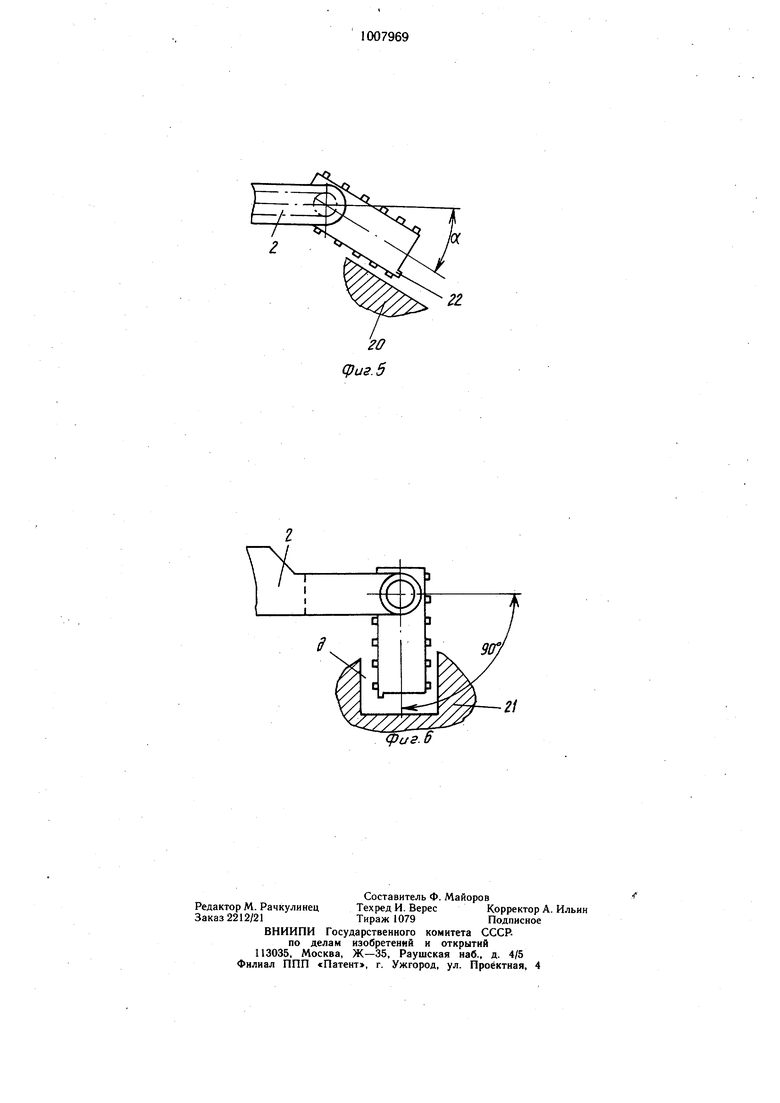
более сложной формы и находящихся в произвольном положении относительно оси схвата (фиг. 4-6); При этом части 4 и 5 матрицы поворачиваются на необходнмые углы, чтобы располагаться параллельно участку обследуемой поверхности объекта (19-21), а также «заглубляются в полости объектов 19 и 21 для их обследования. Элементы адаптивной матрицы могут быть установлены под любым углом относительно оси схвата и вводятся в полости и отверстия обследуемого объекта.
Благодаря выполнению адаптивной матрицы из двух и.ш более частей и закреплению их на передней части губок с возможностью перемещения относительно последних значительно расщиряются функциональные возможности предлагаемого схвата и уменьшаются его габариты.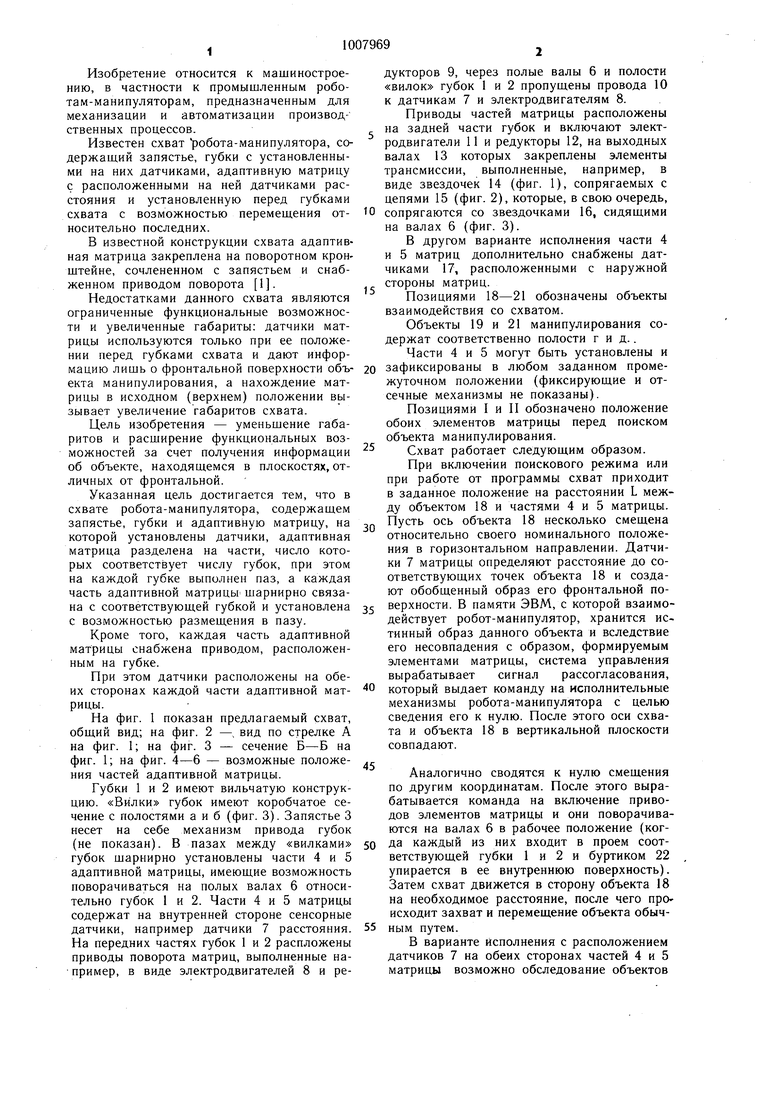
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| ПРОМЫШЛЕННЫЙ МОДУЛЬ | 2003 |
|
RU2248267C1 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват манипулятора | 1983 |
|
SU1175690A2 |
| Схват | 1983 |
|
SU1079429A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
1. СХВАТ РОБОТА-МАНИПУЛЯТОРА, содержащий запястье, губки и адаптивную матрицу, на которой установлены датчики, отличающийся тем, что, с целью уменьшения габаритов и расширения функциональных возможностей за счет получения информации об объекте, находящемся в плоскостях, отличных от фронтальной, адаптивная матрица разделена на части, число которых соответствует числу губок, при этом на каждой губке выполнен паз, а каждая часть адаптивной матрицы щарнирно связана с соответствующей губкой и установлена с возможностью размещения в пазу. 2.Схват по п. 1, отличающийся тем, что каждая часть адаптивной матрицы снабжена приводом, расположенным на губке. 3.Схват по п. 1, отличающийся тем, что датчики расположены на обеих сторонах каждой части адаптивной матрицы. 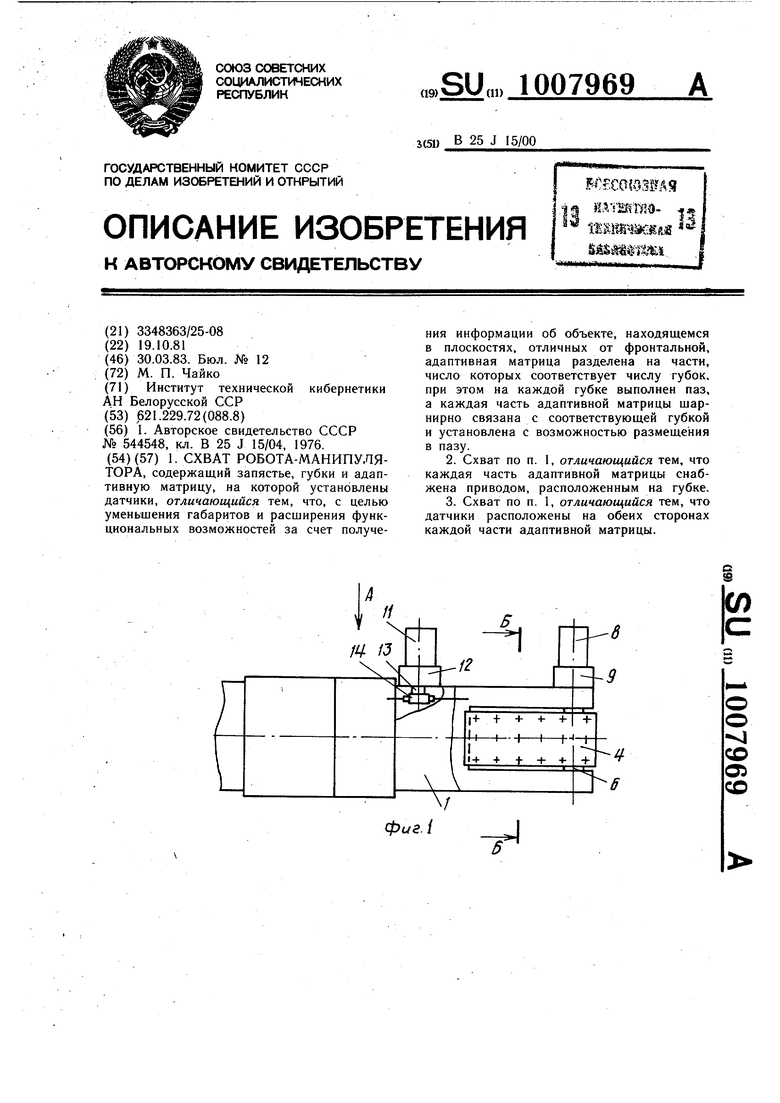
17 ft сриг. 2. f t
фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват робота-манипулятора | 1976 |
|
SU544548A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
