Изобретение относится к конструкции посадочной площадки стационарных или подвижных автоматических станций для приема, зарядки, хранения и обслуживания многовинтовых беспилотных летательных аппаратов (БПЛА) и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора.
Зарядка аккумулятора и обслуживание БПЛА в автоматическом режиме требуют точного позиционирования и ориентации БПЛА на посадочной площадке. Неопределенность позиционирования возникает вследствие неточности работы системы управления в процессе посадки, а также под влиянием погодных факторов, таких как порывистый ветер, туман, снег, дождь, которые как правило ухудшают процесс наведения или вводят неточности в последний момент посадки БПЛА, когда система управления уже не в состоянии провести корректировку местоположения садящегося аппарата с необходимой точностью.
Известны автоматические посадочные площадки станции зарядки и обслуживания БПЛА, в которых после посадки на платформу производится корректировка его местоположения каким-либо активным устройством (манипулятором).
Посадочная платформа автоматической станция, согласно заявке US 2014/0124621 А1, принимает БПЛА на плоскую плоскость. После посадки БПЛА механизм выравнивания перемещает четырьмя планками БПЛА в зону позиционирования, в которой осуществляется зарядка, замена аккумулятора или иной вид обслуживания.
Посадочная платформа автоматической станция, согласно заявке US 2014/0319272 А1, также принимает БПЛА на плоскую поверхность, однако после этого БПЛА с помощью двух планок выводит аппарат из зоны посадки в зону зарядки и обслуживания.
Другой тип посадочных станций содержит пассивные устройства позиционирования БПЛА при приземлении. Точность позиционирования обеспечивается взаимодействием какого-нибудь элемента приземляющегося БПЛА с направляющим элементом посадочной площадки.
Посадочная платформа для БПЛА, согласно US D 805,018 S, выполнена по размеру расположения опор БПЛА и имеет вокруг наклонные поверхности. После посадки БПЛА скатывается по этим поверхностям и позиционируется на посадочной платформе.
Автоматическая станция, согласно патенту US 9,139,310 В1, содержит конические углубления (воронки) на посадочной платформе по местам расположения опоры БПЛА. Данная конструкция позиционирует БПЛА, если отклонение от точки посадки не более радиуса воронки в верхней части. Данная конструкция способна принимать аппараты с таким же расположением опор.
Прототипом изобретения является посадочная платформа для БПЛА вертикального взлета и посадки, содержащая установленные соосно вертикальных опор принимаемого БПЛА воронки, установленные ниже воронок направляющие с основаниями, контакты для подключения напряжения для зарядки аккумулятора БПЛА или связи с ним US 20170217323 A1.
Такая посадочная платформа способна посадить БПЛА с точным позиционированием в случае, если каждая опора аппарата попадает в свою воронку. То есть данное устройство допускает отклонение в посадке, равное радиусу верхнего основания конуса воронки. Стремление обеспечить успешную посадку при максимальном отклонении вынуждает выполнять диаметр верхнего основания конуса воронки максимально большим, а это в свою очередь приводит к увеличению глубины конуса и, как следствие, к увеличению клиренса БПЛА или минимальной высоты подвеса груза или камеры на БПЛА. Таким образом, для БПЛА с малым клиренсом или низким подвесом груза данная платформа не может иметь большой глубины воронки, а следовательно, большого радиуса верхнего основания конуса воронки и, соответственно, обеспечить успешную посадку при большом отклонении приземляющегося аппарата.
Технической задачей изобретения является расширение возможностей посадочной платформы путем обеспечения возможности приема БПЛА с низким клиренсом или низкой посадкой подвешенного груза.
Упрощение процесса посадки и повышения надежности посадки путем расширения допустимого отклонения при посадке БПЛА, а также обеспечения беспрепятственного спуска опор БПЛА к центру воронки под воздействием силы тяжести без задержек или перекосов БПЛА.
Обеспечение возможности использования посадочной платформы на подвижном объекте путем закрепления БПЛА на площадке после посадки.
Облегчение и повышение надежности взлета БПЛА с посадочной платформы, за счет подъема БПЛА перед взлетом и катапультированием.
Технический результат достигается тем, что в посадочной платформе беспилотного летального аппарата (БПЛА), содержащей воронки, направляющие и основания, в соответствии с предложенным решением каждая воронка выполнена многоярусной с возможностью телескопического складывания.
В посадочной платформе ярусы одного уровня всех воронок имеют равные высоты и углы конуса.
В посадочной платформе высоты ярусов разных уровней могут быть равными. В посадочной платформе высоты ярусов разных уровней могут быть различными. В посадочной платформе углы конусов ярусов разных уровней могут быть равными. В посадочной платформе углы конусов ярусов разных уровней могут быть различными.
В посадочной платформе направляющие отделены от нижних ярусов воронок.
В посадочной платформе основания выполнены подвижными.
В посадочной платформе верхние сечения всех воронок выполнены одной геометрической формы.
В посадочной платформе все ярусы воронок могут быть выполнены подвижными, а направляющие выполнены неподвижными.
В посадочной платформе может быть один из ярусов воронок выполнен неподвижным, остальные ярусы и направляющие выполнены подвижными.
В посадочной платформе ярусы одного уровня всех воронок, направляющие и основания могут быть соединены между собой и иметь линейные приводы.
В посадочной платформе ярусы одного уровня всех воронок, направляющие и основания могут быть установлены на единые плиты и соединены с актуаторами линейных перемещений.
В посадочной платформе на каждый ярус, направляющую и основание могут быть установлены датчики определения касания опор БПЛА.
В посадочной платформе, по крайней мере, один из ярусов может быть установлен с принижением линии стока.
В посадочной платформе, по крайней мере, один из ярусов может быть установлен с превышением линии стока.
В посадочной платформе все ярусы воронок могут быть установлены т.о., что верхние кромки расположены на одном уровне, при этом ширина тела ярусов воронок меньше диаметра контактной поверхности опоры БПЛА.
В посадочной платформе ярусы воронки обрамляют посадочную площадку, выполненную в виде многогранника, соединяющего направляющие, при этом поверхность посадочной площадки, направляющие и верхние кромки ярусов установлены на одном уровне, ширина тела ярусов воронки меньше диаметра контактной поверхности опоры БПЛА.
В посадочной платформе направляющие содержат устройства для удержания БПЛА. В посадочной платформе направляющие могут быть выполнены в виде цангового зажима.
В посадочной платформе направляющие могут содержать пневматические зажимы.
В посадочной платформе по крайней мере часть оснований направляющих могут содержать не менее одного выдвигаемого штыревого контакта, например, контакт типа banana pin.
В посадочной платформе подвижные основания направляющих могут быть связаны с приводом для катапультирования БПЛА из посадочной платформы, например, пневмоцилиндром.
Сущность изобретения поясняется следующим графическим материалом.
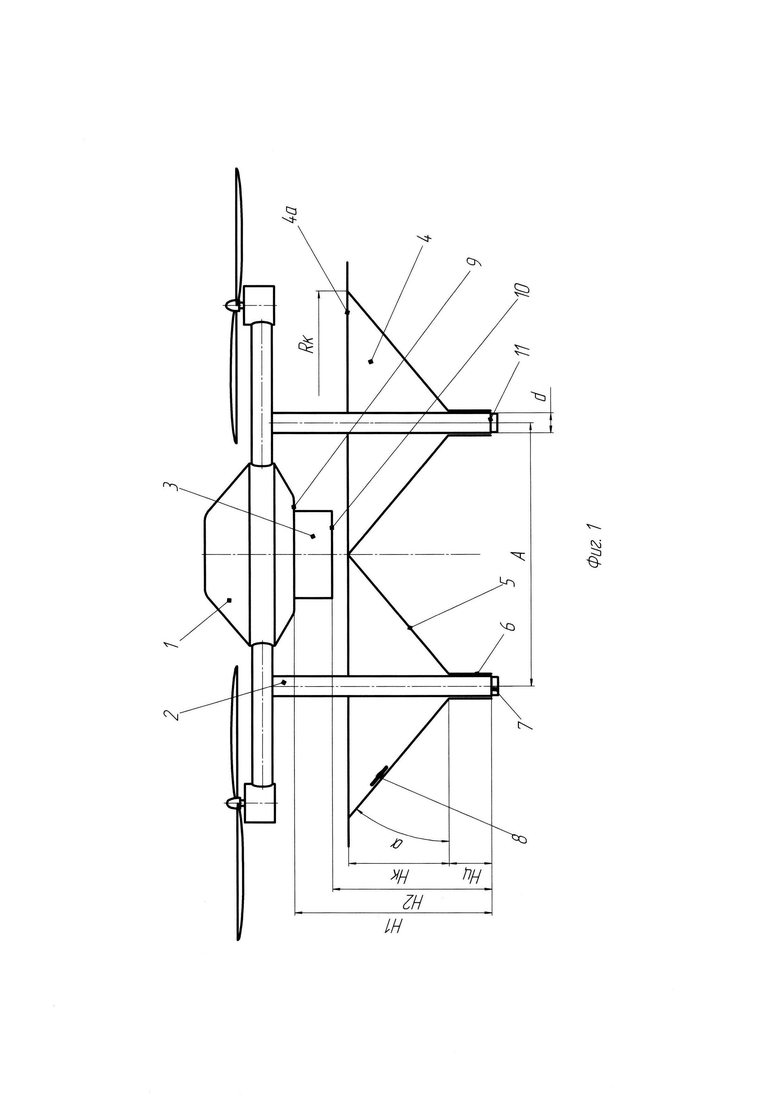
На фиг. 1 изображена графическая схема посадки БПЛА на посадочную платформу с воронками и представлены наиболее важные с точки зрения работы размеры платформы и БПЛА.
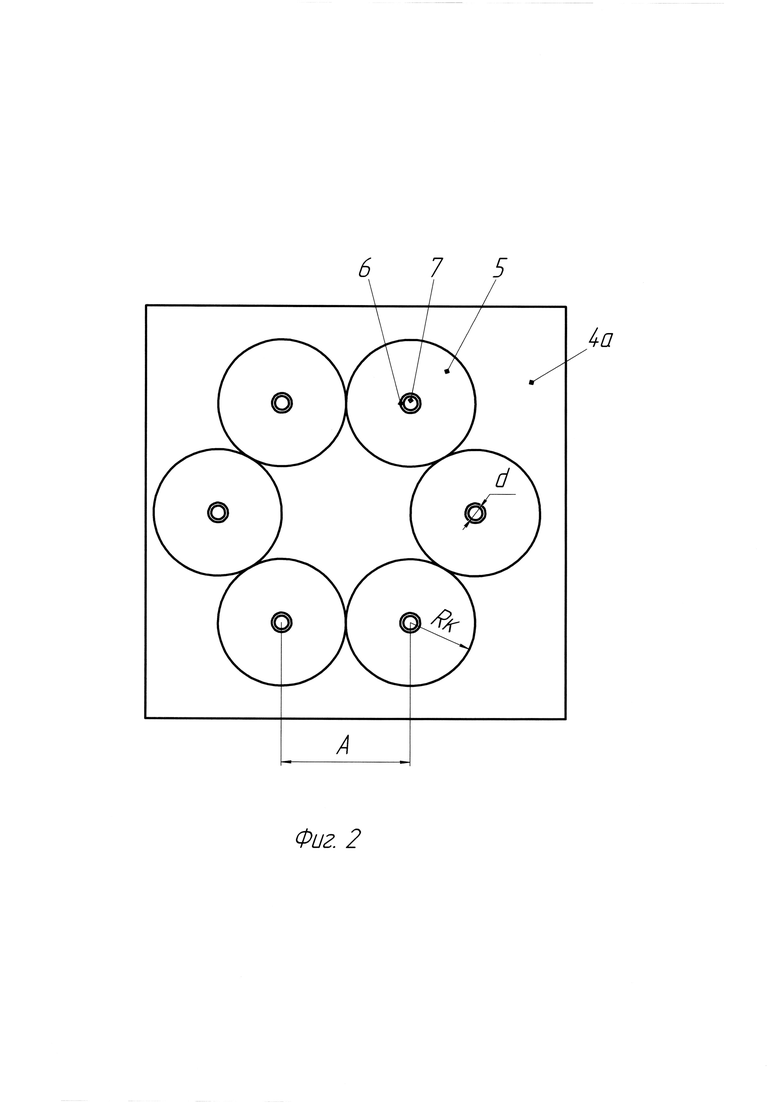
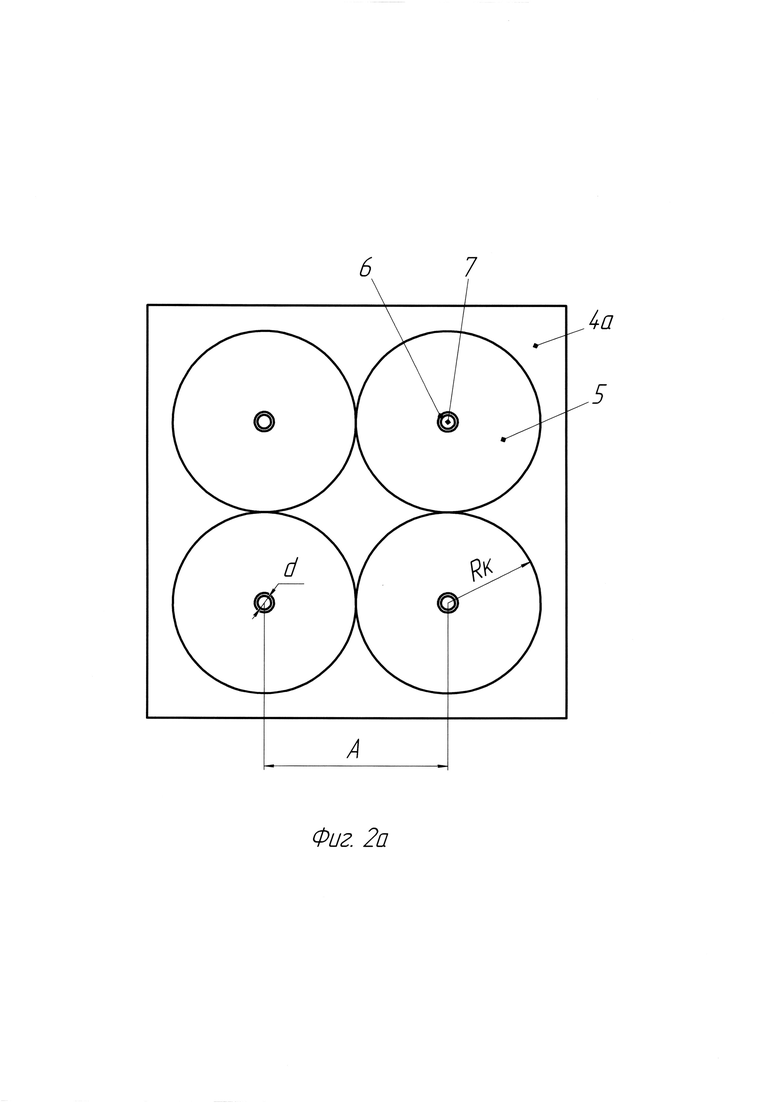
На фиг. 2 и 2а изображены виды сверху посадочных площадок под различное количество опор.
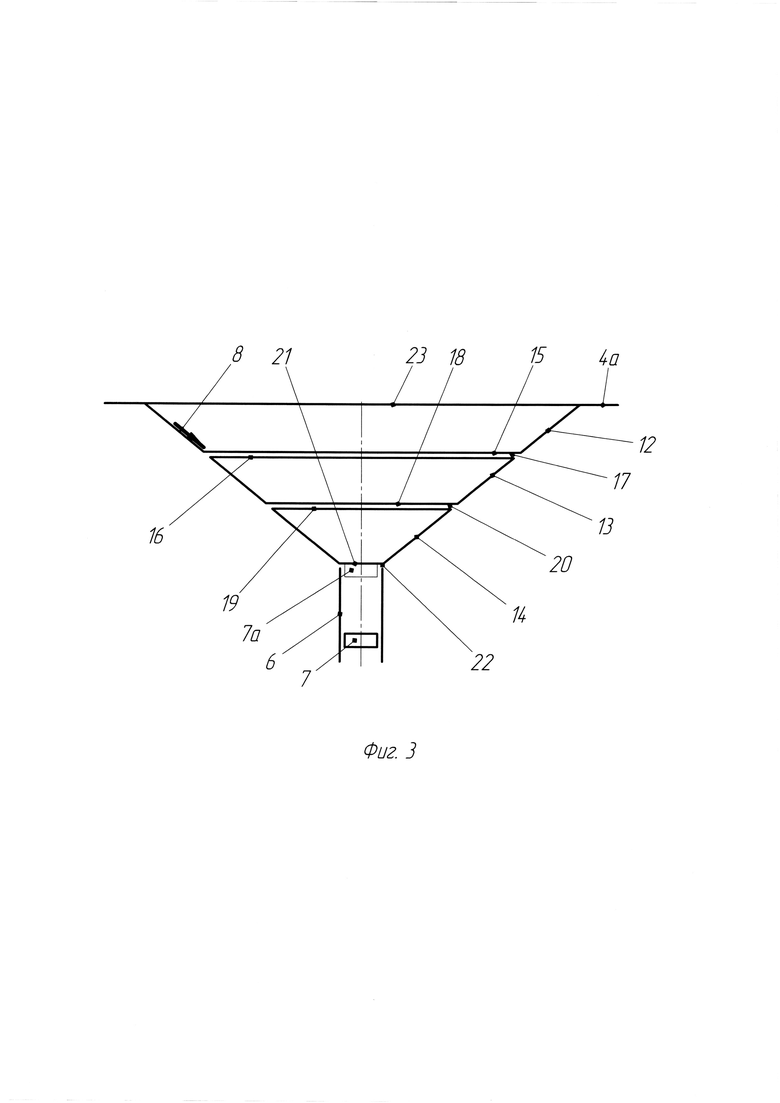
На фиг. 3 изображена графическая схема разбивки воронок посадочной платформы на ярусы.
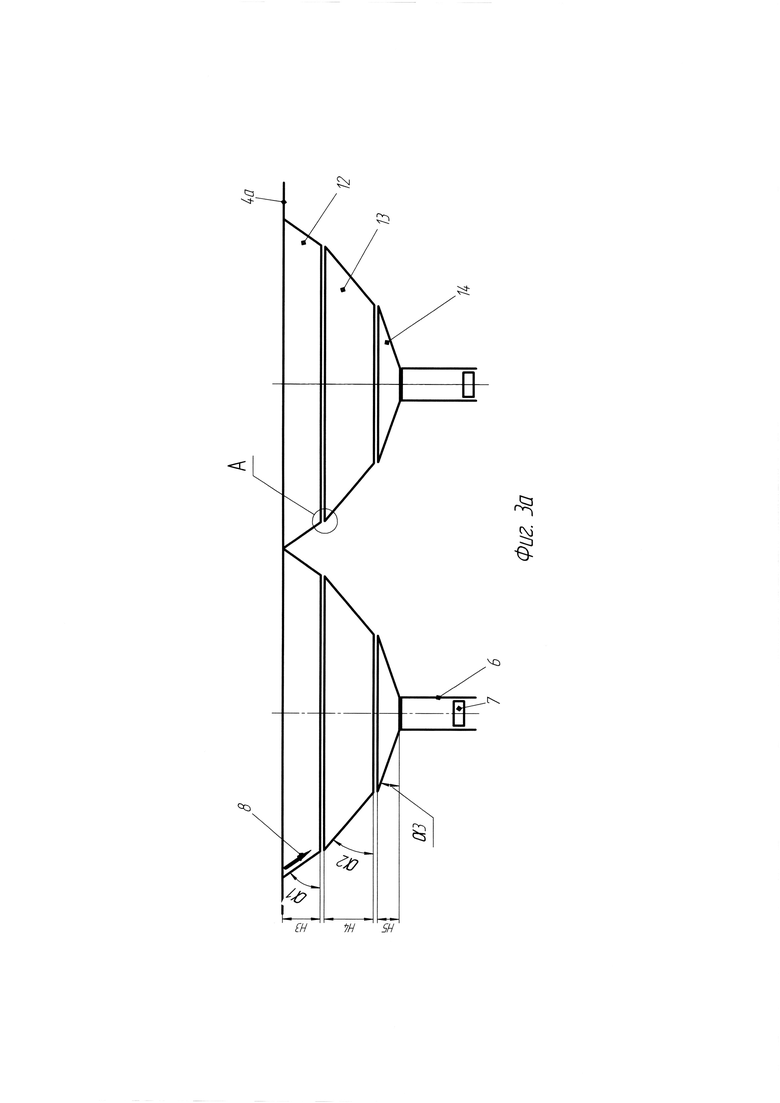
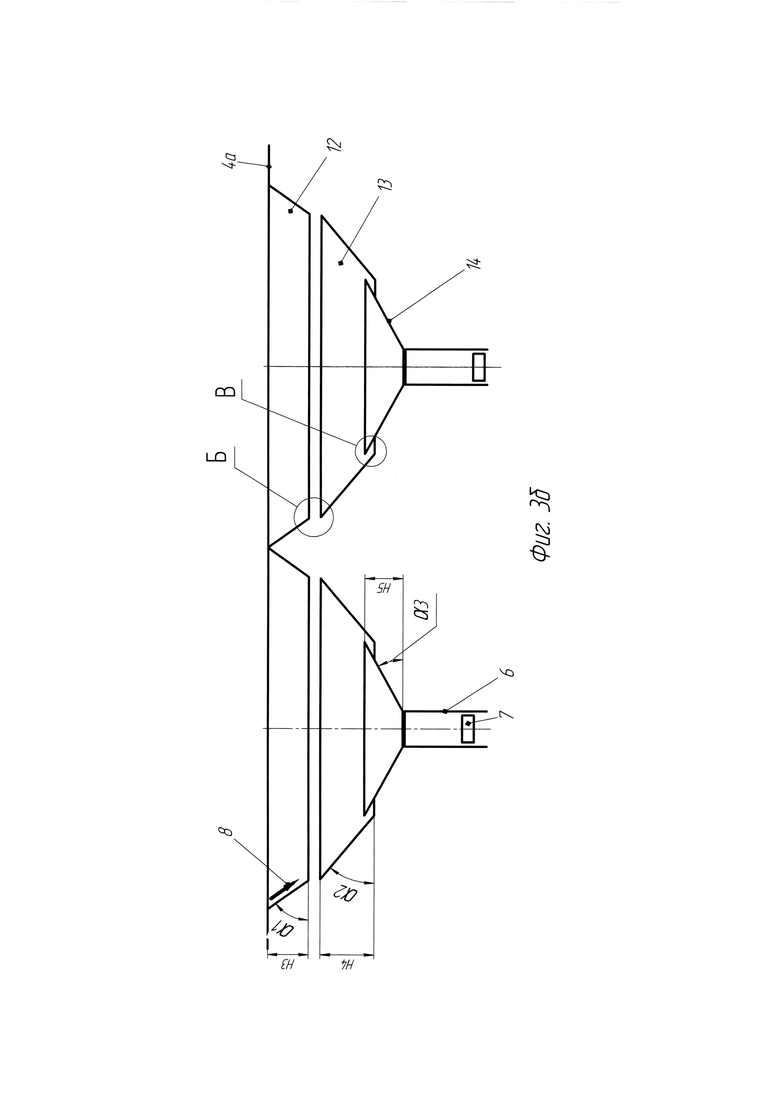
На фиг. 3а и 3б изображены графические схема воронок для различных углов наклона и взаимного расположения ярусов воронок посадочной платформы.
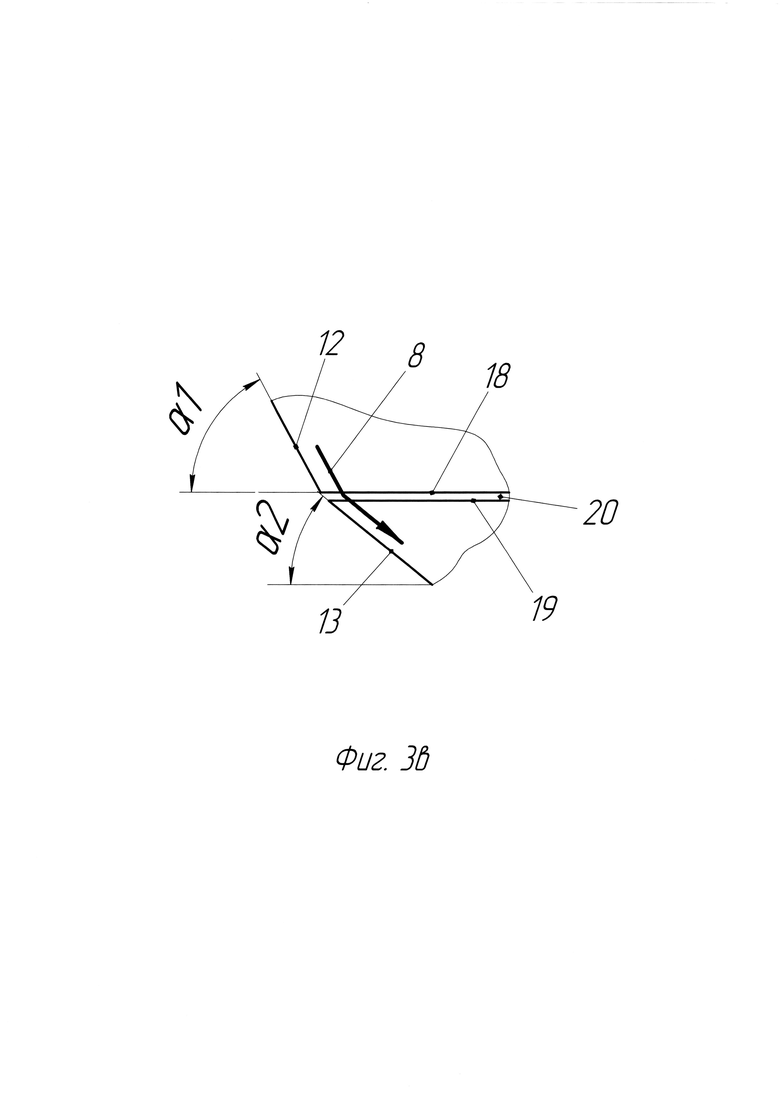
На фиг. 3в изображен выносной элемент А по фиг. 3а
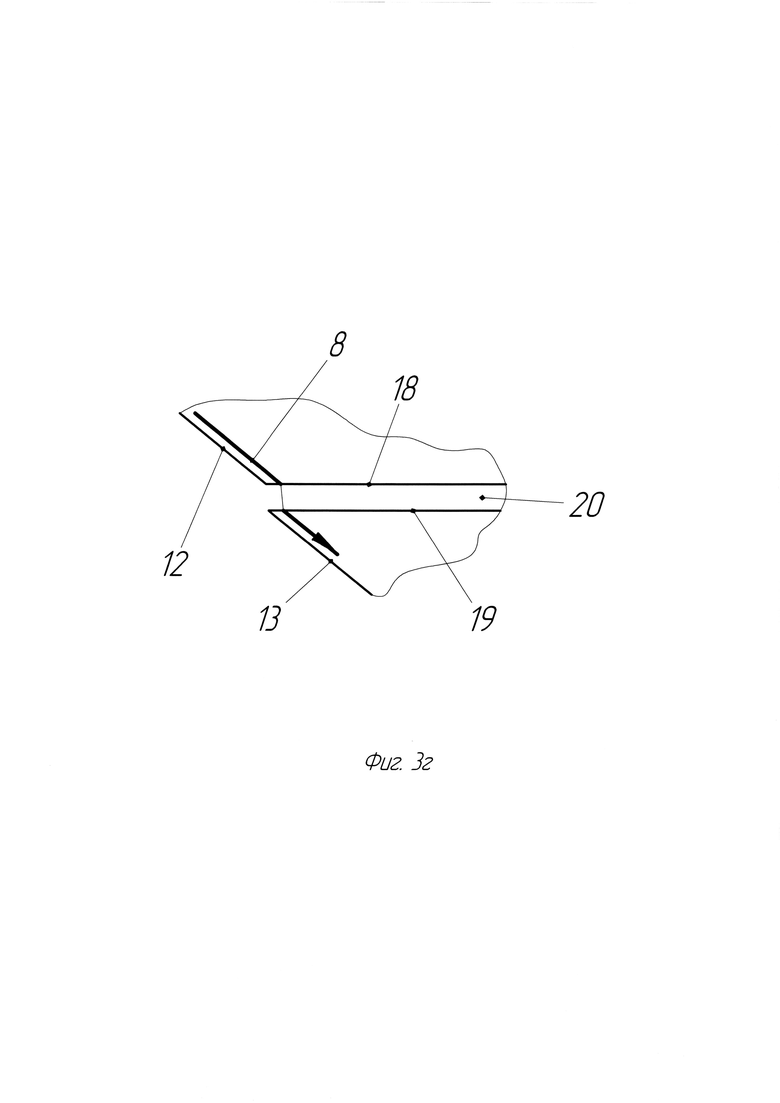
На фиг. 3г изображен выносной элемент Б по фиг. 3б
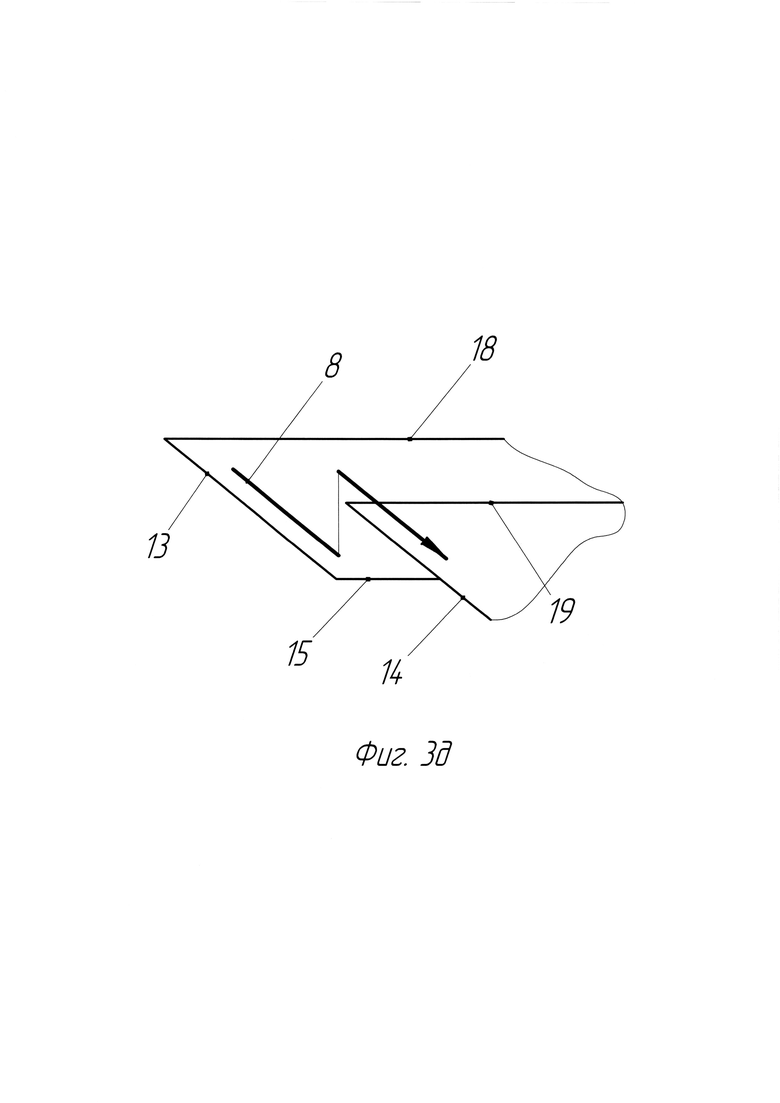
На фиг. 3д изображен выносной элемент В по фиг. 3б
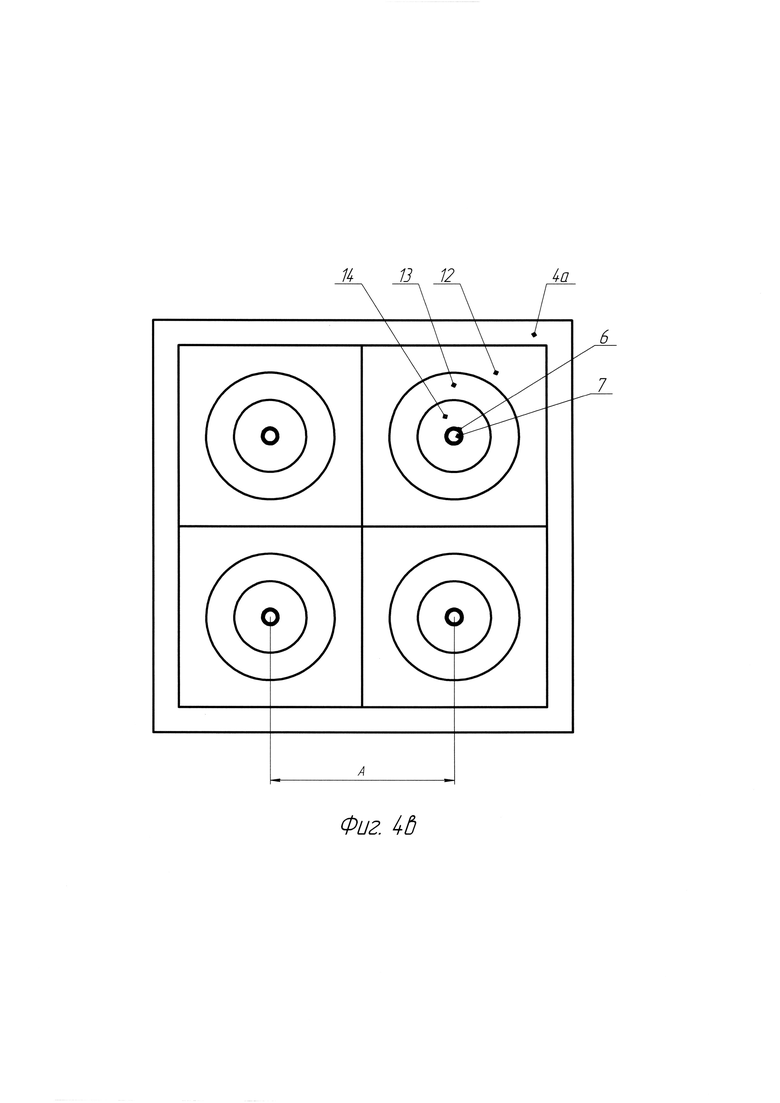
На фиг. 4, 4а, 4б и 4в изображены виды сверху посадочных площадок под различное количество опор с разбивкой воронок на ярусы.
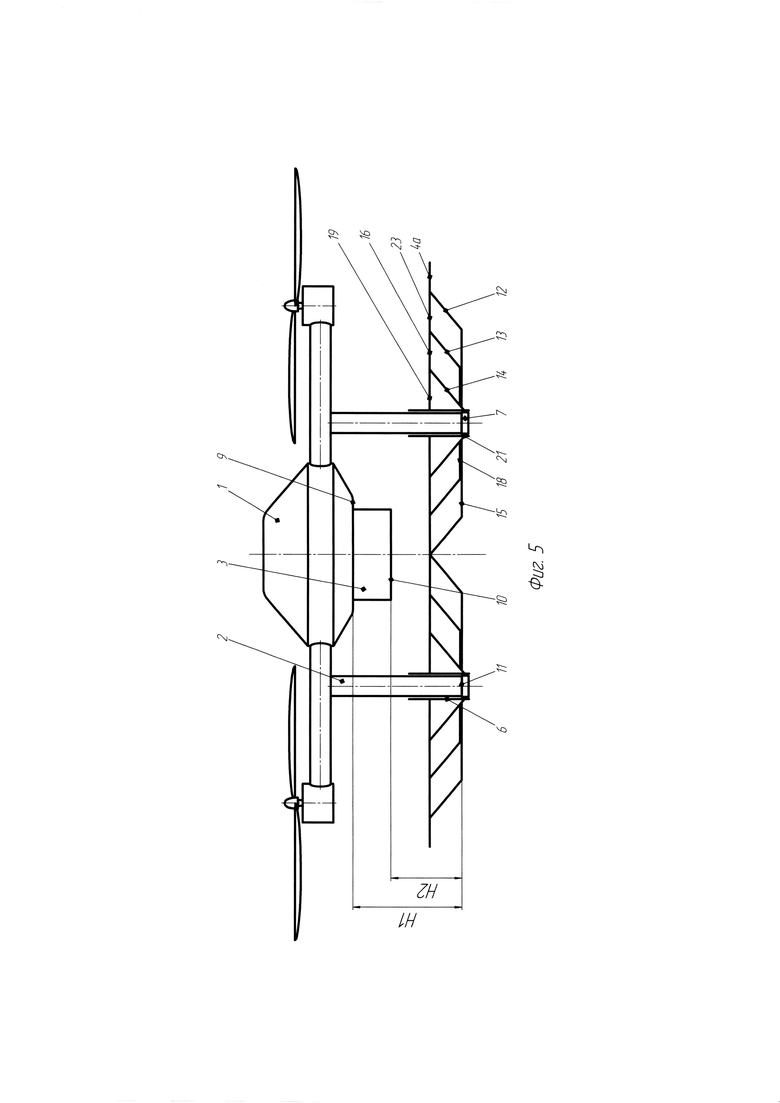
На фиг. 5 изображена графическая схема посадочной платформы после посадки БПЛА.
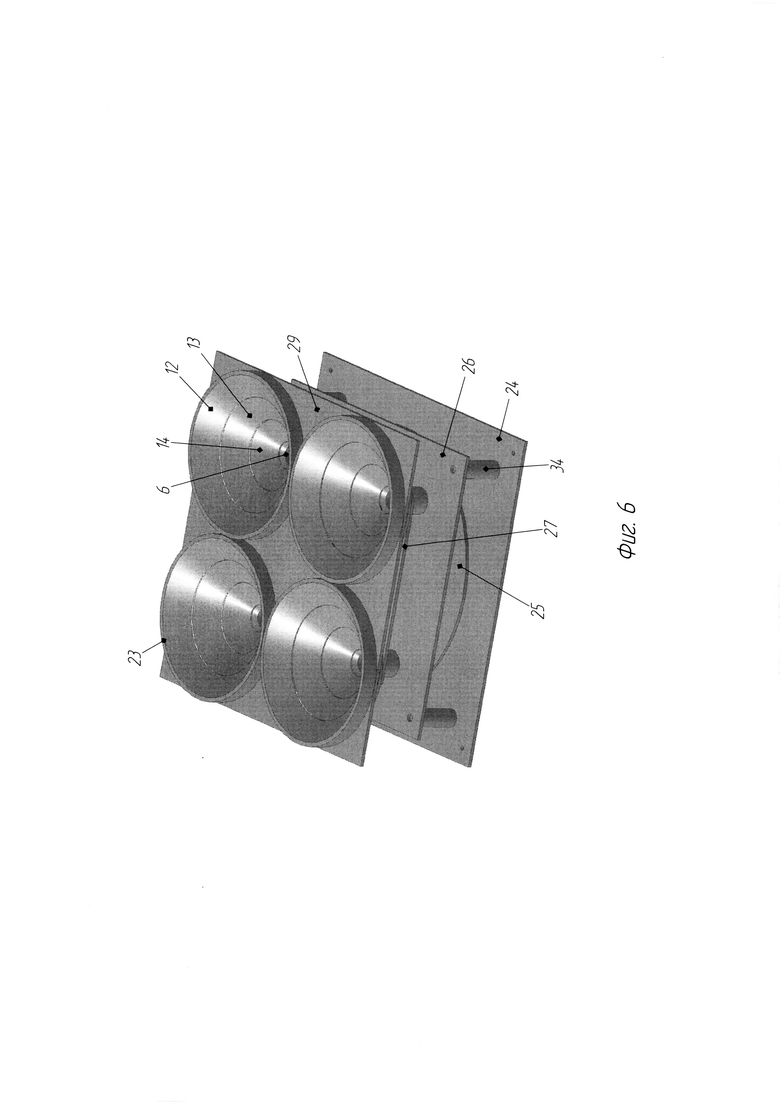
На фиг. 6 изображена конструкция посадочной платформы, реализующая схемы фиг. 3, 4 и 5.
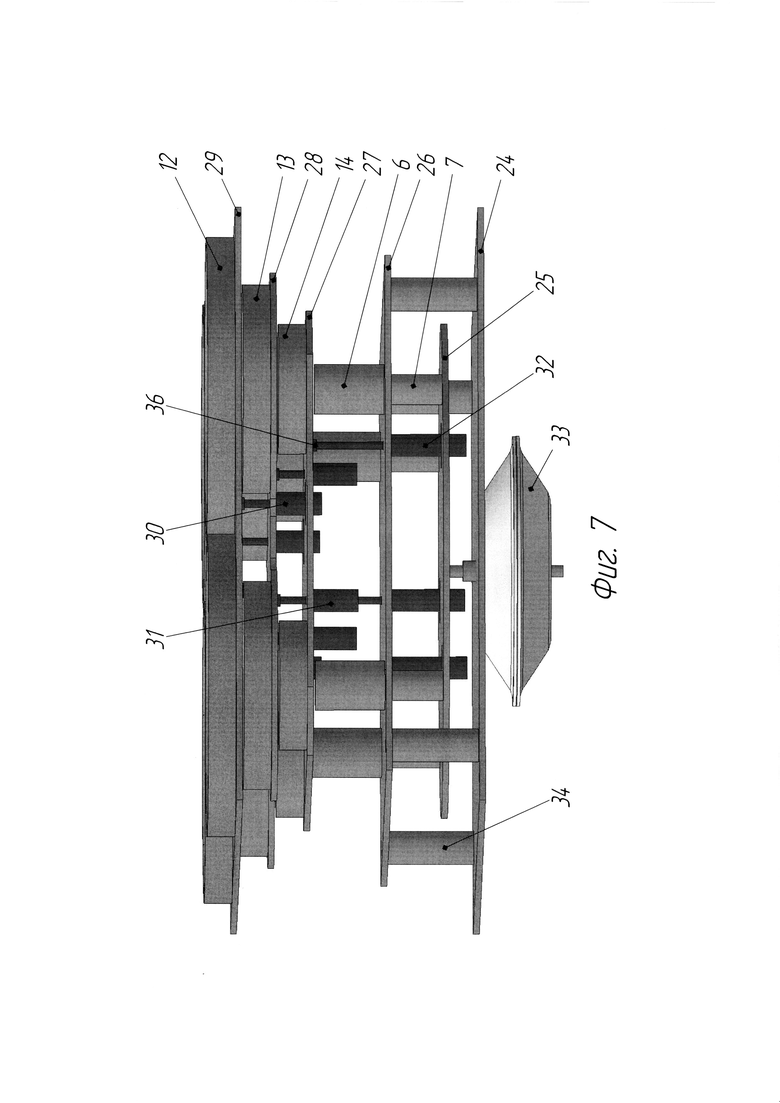
На фиг. 7 изображена посадочная платформа фиг. 6 вид сбоку.
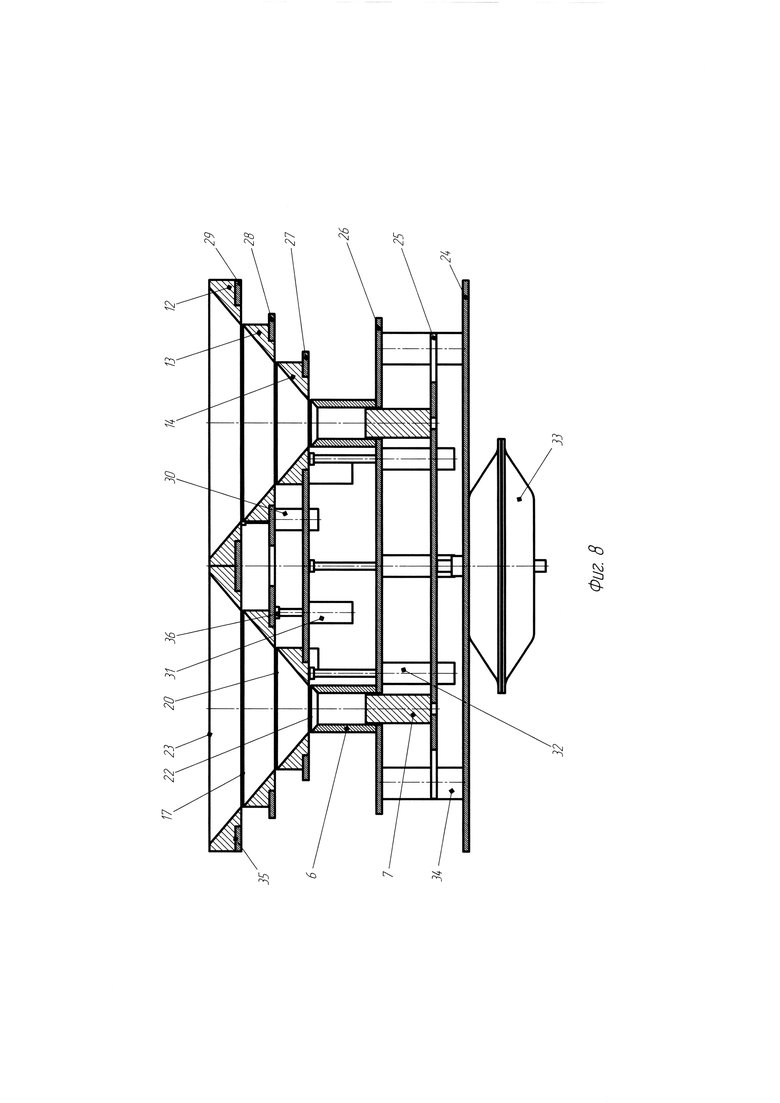
На фиг. 8 изображен разрез посадочной платформы фиг. 6 по двум осям воронок.
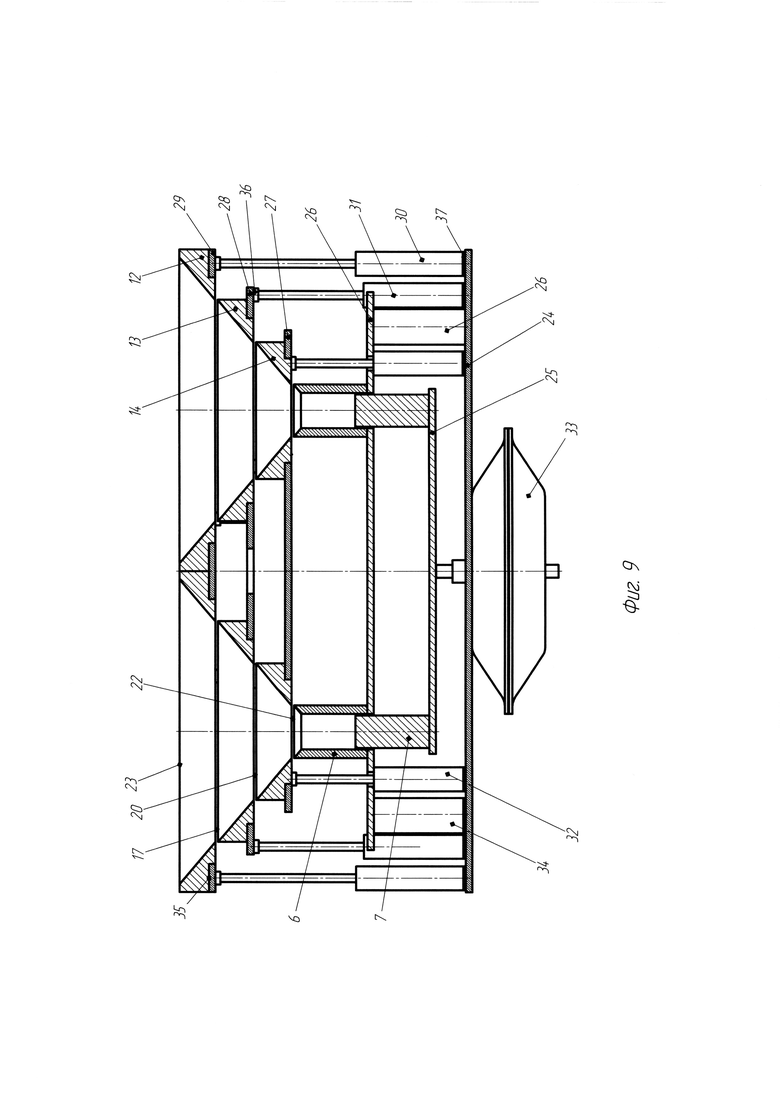
На фиг. 9 изображен разрез посадочной платформы фиг. 6 по двум осям воронок в случае привода всех ярусов от одной плоскости.
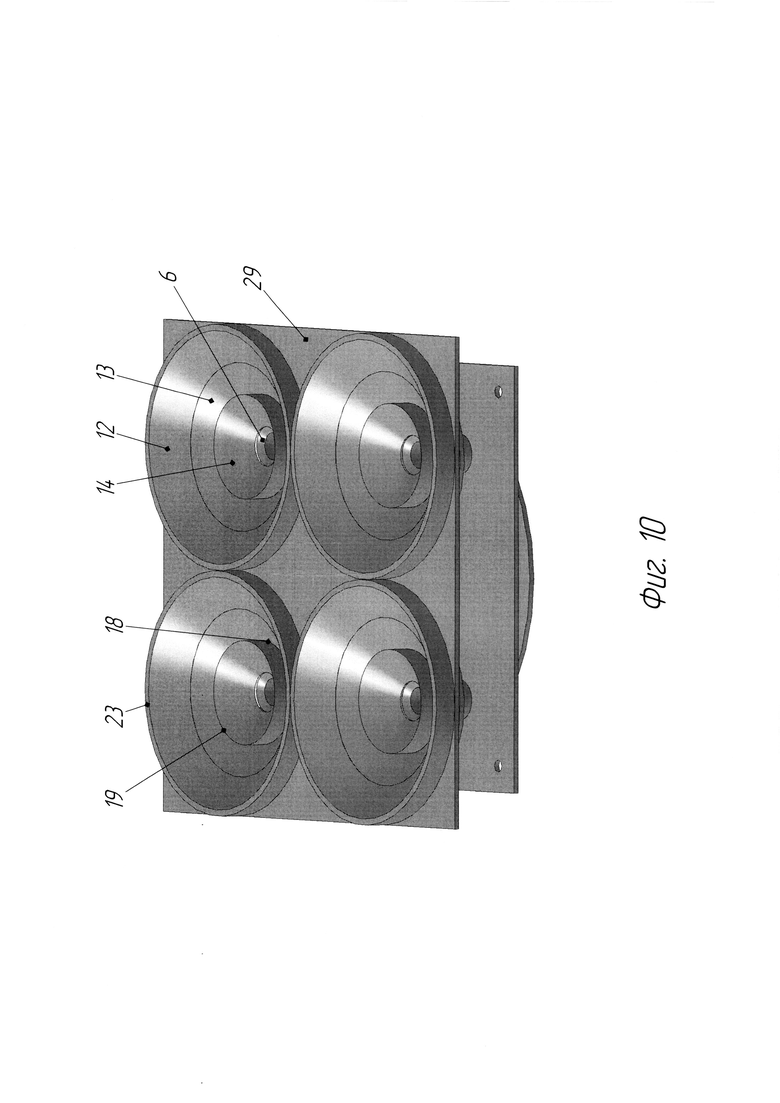
На фиг. 10 изображена посадочная платформа, в которой один из нижних ярусов воронок установлена с превышением линии стока
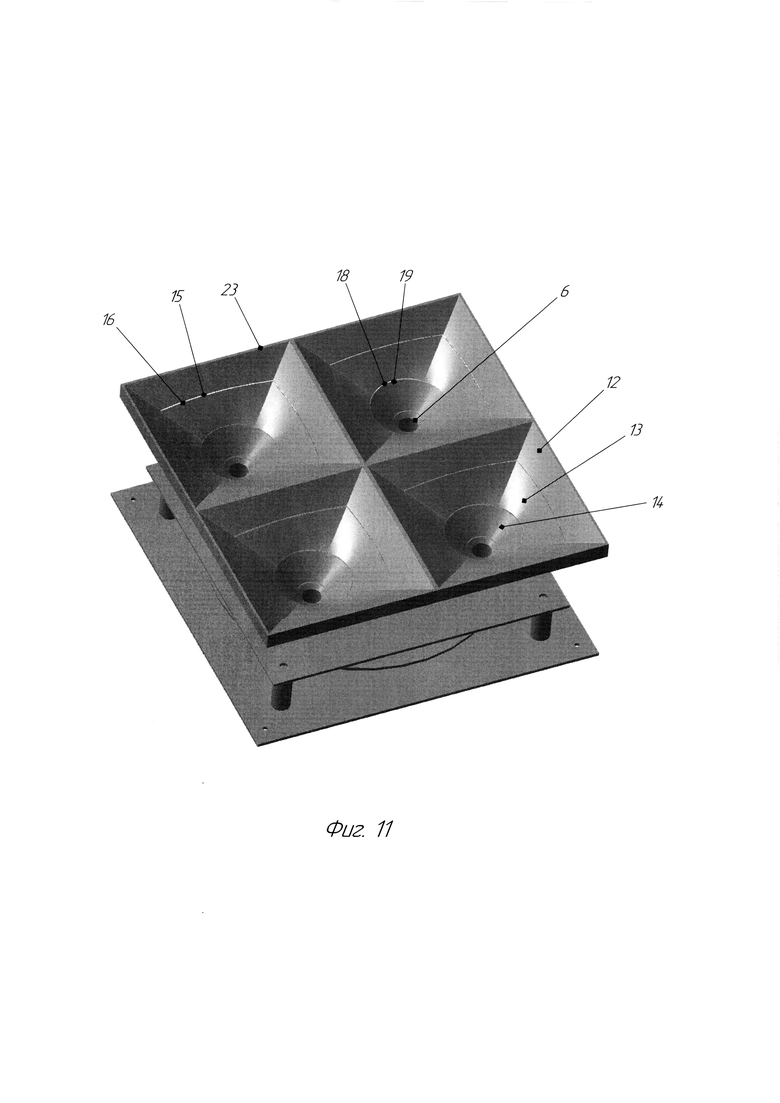
На фиг. 11 изображена посадочная платформа, в которой верхнее сечение верхнего яруса воронки выполнено в виде многогранника.
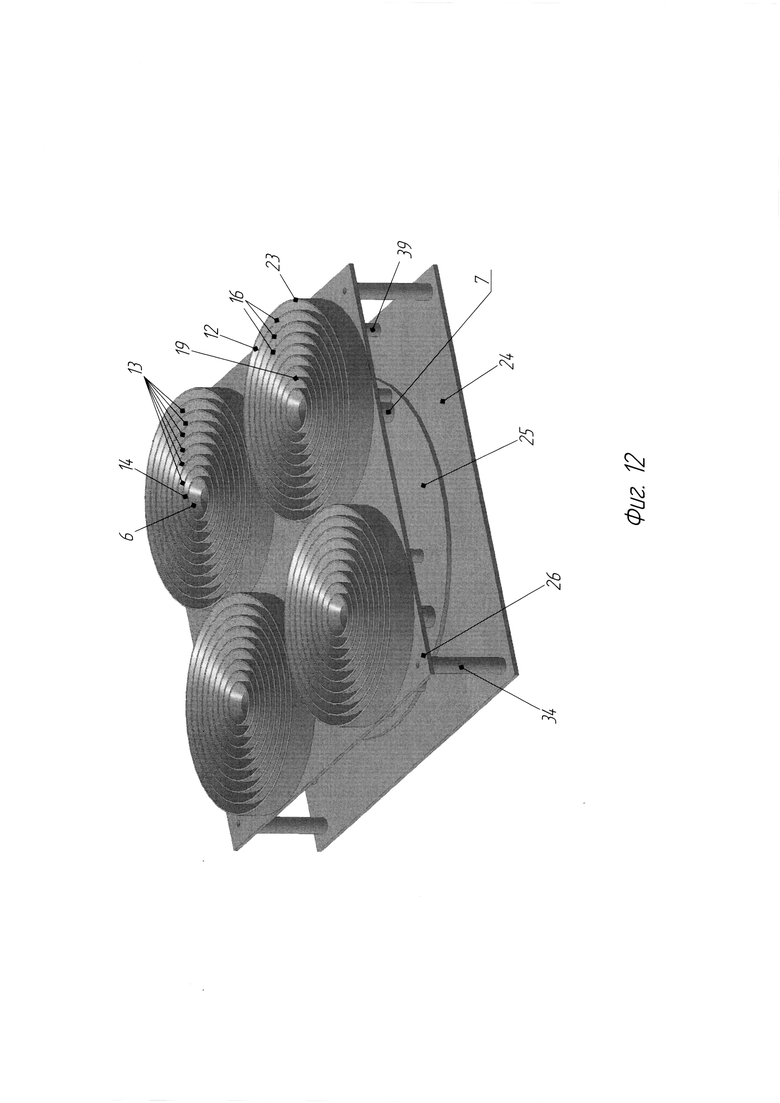
На фиг. 12 изображена посадочная платформа, у которой верхние кромки всех ярусов воронок расположены на одном уровне.
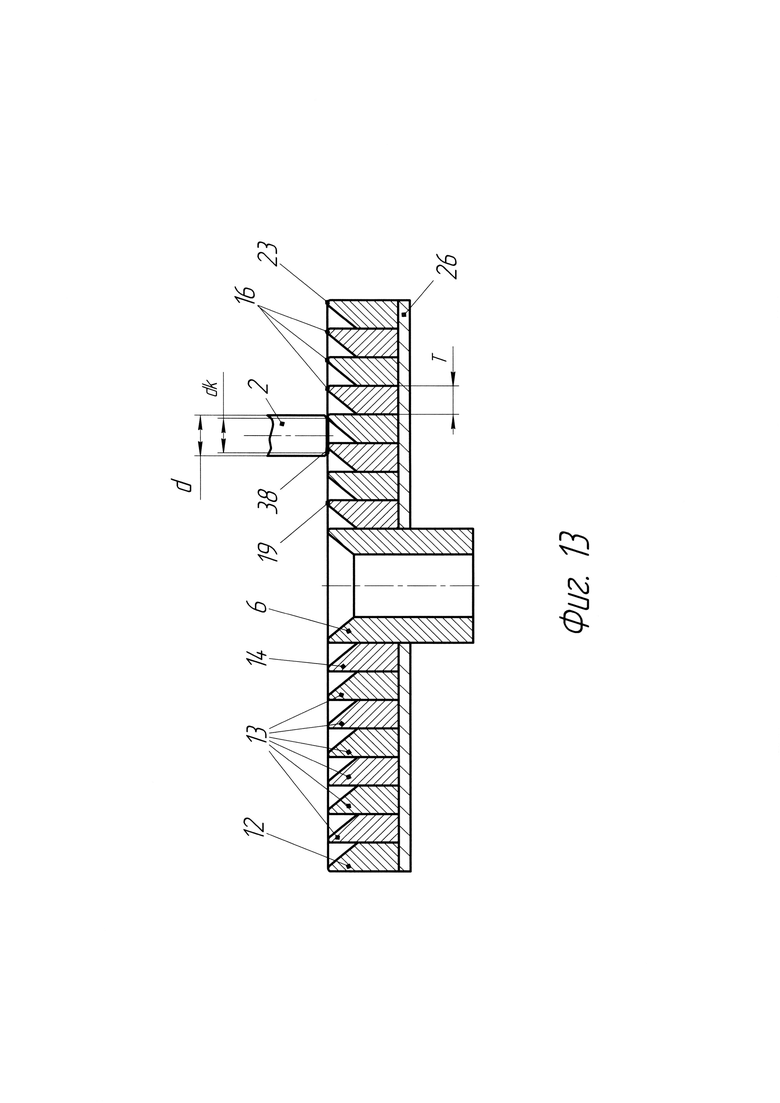
На фиг. 13 изображена схема, разъясняющая соотношения посадочной поверхности опор БПЛА и воронок.
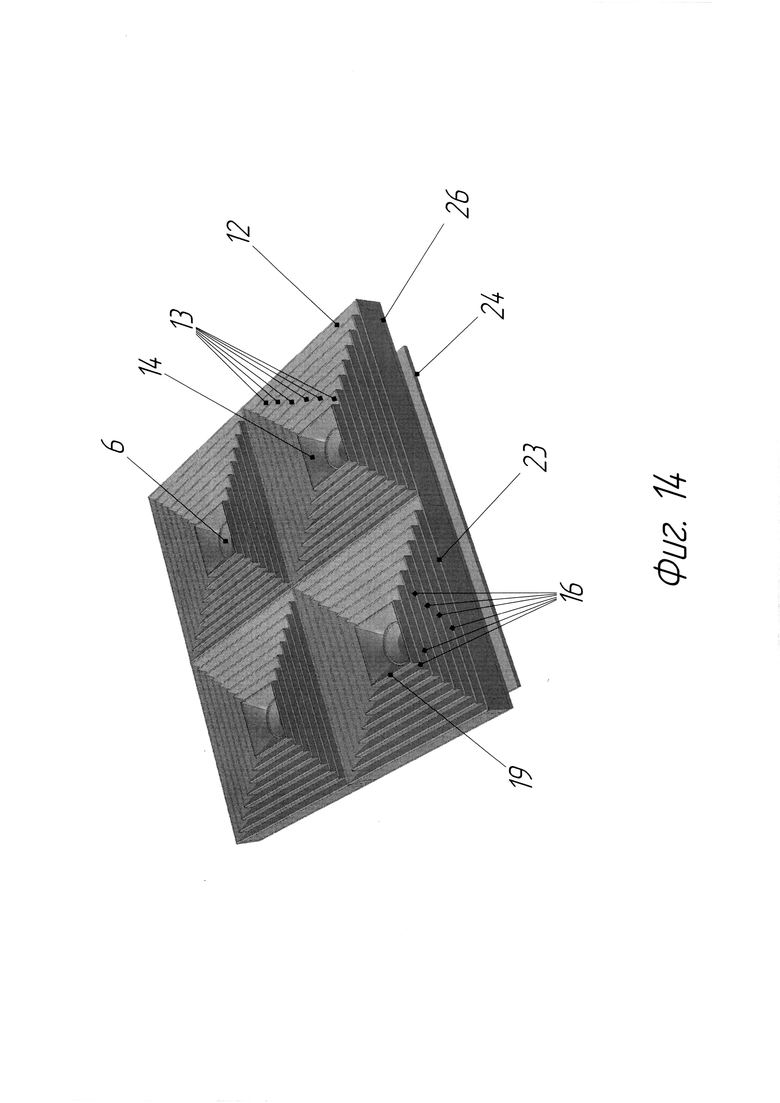
На фиг. 14 изображена посадочная платформа, у которой верхние кромки всех ярусов воронок расположены на одном уровне и выполнены в виде многогранника.
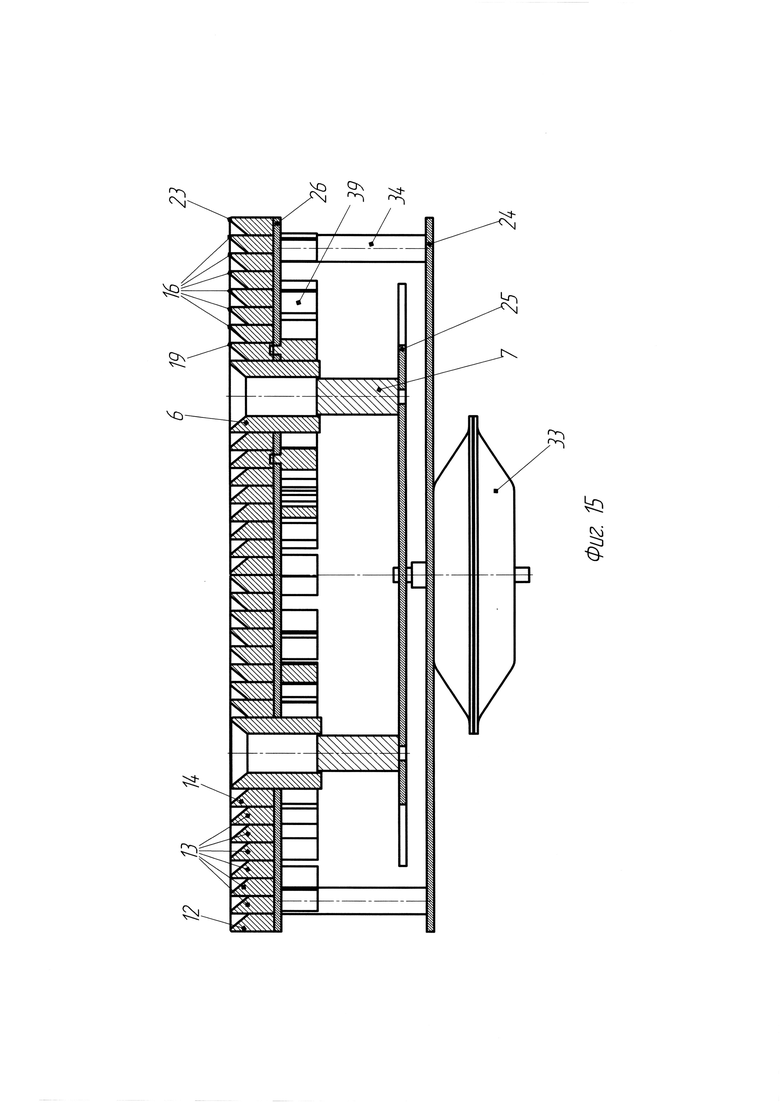
На фиг. 15 изображена посадочная платформа, у которой верхние кромки всех ярусов воронок расположены на одном уровне, сечение по осям направляющих.
На фиг. 16 изображена посадочная платформа, где ярусы воронки обрамляют посадочную площадку, выполненную в виде многогранника.
На фиг. 17 изображена направляющая, выполненная в виде цанги.
На фиг. 18 изображена направляющая, содержащая пневматический зажим.
На фиг. 19 изображено основание со штыревым контактом.
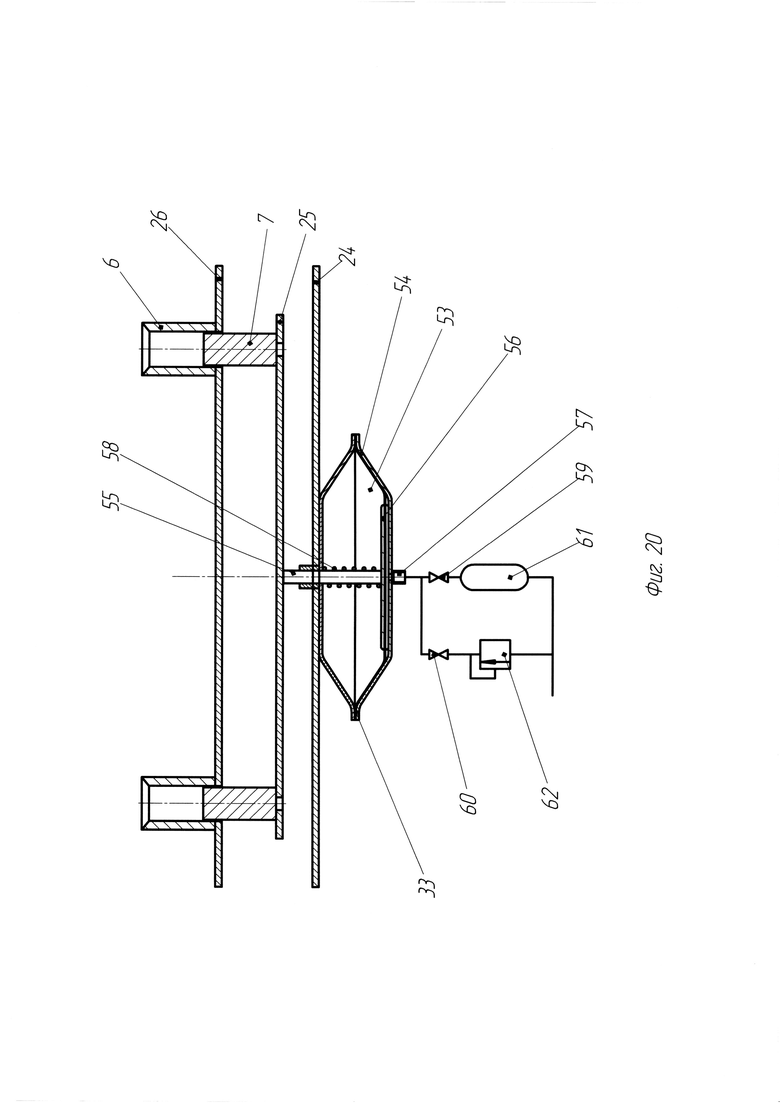
На фиг. 20 изображен привод основания для катапультирования.
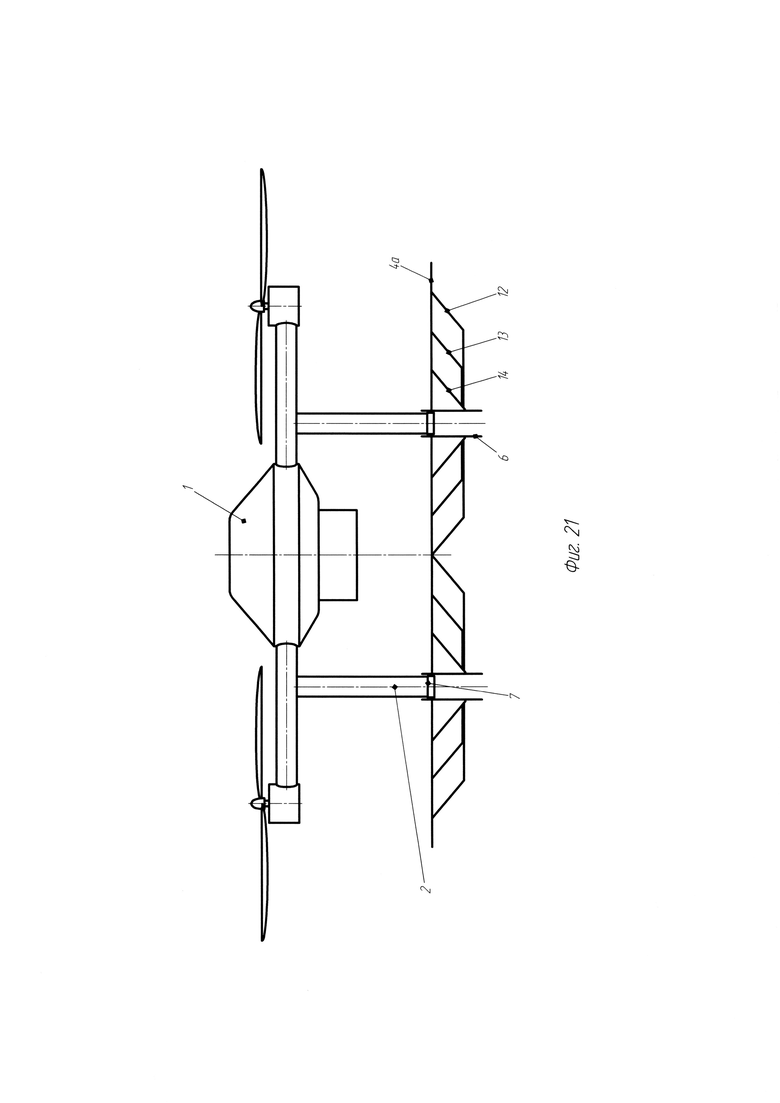
На фиг. 21 изображена графическая схема посадочной платформы при взлете БПЛА.
На фиг. 1 представлена схема посадки БПЛА 1 с опорами 2 и подвешенным грузом 3 на посадочную платформу 4 с воронками 5, направляющими 6 и основаниями 7. Количество воронок 5, направляющих 6 и основании 7 совпадает с количеством опор 2 БПЛА 1. Воронки 5, направляющие 6 и основания 7 установлены соосно опор 2 принимаемого БПЛА 1. Позицией 4а обозначена верхняя плоскость посадочной платформы 4. Позицией 8 обозначены линия стока - линия наибольшего угла наклона поверхности воронки 5, по которым спускаются опоры 2 БПЛА 1. Позицией 9 обозначена самая нижняя точка корпуса БПЛА 1; 10 - самая нижняя точка подвешенного груза 3; 11 - нижняя плоскость опор 2 БПЛА 1. Направляющие 6 и основания 7 могут быть цилиндрическими или иметь форму многогранника. Для удобства изложения в заявке приняты следующие буквенные обозначения:
H1 - высота клиренс БПЛА1- расстояние от нижней плоскости 11 опор 2 до самой низкой точки 9 корпуса БПЛА 1;
Н2 - Наименьшее расстояние от нижней плоскости 11 опор 2 до самой нижней точки 10 подвешенного на БПЛА 1 груза 3;
Нк - Высота воронки 5;
Нц - Высота направляющих 6;
Rк - Радиус воронки 5 в верхней плоскости;
α - угол наклона линии стока 8 воронки 5 к горизонту;
d - диаметр опор 2 БПЛА 1;
А - расстояние между соседними направляющими 6 посадочной платформы 4, равное расстоянию между центрами соседних опор 2 БПЛА 1.
После посадки БПЛА 1 на посадочную платформу 4 самая нижняя точка 9 корпуса БПЛА 1 или самая нижняя точка 10 груза 3, подвешенного на БПЛА 1, не должны касаться верхней поверхности 4а посадочной платформы 4. Для выполнения этого условия сумма высот воронки 5 и направляющих 6 должна быть меньше высоты клиренса БПЛА1 или наименьшего расстояния от нижней точки 11 опор 2 до самой нижней точки 10 подвешенного на БПЛА 1 груза 3:
Нц+Нк<H1
Нц+Нк<Н2
Угол наклона линии стока 8 воронок 5 должен быть больше угла трения материалов пары опора 2 и воронка 5.

где μ - коэффициент трения материалов пары опоры 2 и воронки 5,
αтр - угол трения материалов пары опоры 2 и воронки 5.
При посадке БПЛА 1 будет успешно позиционирован в том случае, если каждая опора 2 попадет в соответствующую воронку 5. Данное условие выполняется в случае, если отклонение опор 2 БПЛА 1 от оси соответствующих воронок 5 составит не более чем
где Х - наибольшее допустимое отклонение при посадке.
С другой стороны, величина радиуса воронки 5 ограничена касанием воронок 5 друг друга. Учитывая, что воронки 5 под все опоры 2 одинаковы, касание воронок 5 произойдет посередине между опор 2. Очевидно, следует брать соседние опоры 2, между которыми расстояние наименьшее (см. фиг. 2 и 2а):
или
Глубина воронок 5 напрямую зависит от радиуса воронки 5 на верхней плоскости 4а посадочной платформы 4 и угла наклона линии стока 8.
Указанные отношения позволяют рассчитать соотношения между допустимым отклонением X посадки БПЛА1 и высотой клиренса Н2 БПЛА 1 или наименьшим расстоянием Н2 от нижней плоскости 11 опор 2 до самой нижней точки 10 подвешенного на БПЛА 1 груза 3.
На фиг. 2 и 2а представлены виды сверху посадочных площадок 4а под различное количество опор 2 БПЛА 1 и расстояние между направляющими 6 для каждого случая. Также возможны другие варианты посадочных площадок 4а под целесообразное количество опор 2 и их расположение.
На фиг. 3 изображена графическая схема разбивки воронок 5 посадочной платформы 4 на составные части - ярусы.
Каждая воронка 5 выполнена многоярусной с возможностью телескопического складывания (осевого перемещения) и содержит верхний 12, один или несколько промежуточных 13 и нижний 14 ярусы. Ярусы одного уровня всех воронок имеют равные высоты и углы конуса
Направляющие 6 отделены от нижних 14 ярусов воронок 5. Основания 7 выполнены подвижными, например, с линейным приводом, и могут находиться в любой, в том числе нижней (7) или верхней (7а) части направляющих 6. Между нижней 15 кромкой верхнего яруса 12 воронки 5 и верхней 16 кромкой промежуточного 13 яруса воронки 5 имеется зазор 17. Между нижней 18 кромкой промежуточного 13 яруса воронки 5 и верхней 19 кромкой нижнего 14 яруса воронки 5 имеется зазор 20. Между нижней 21 кромкой нижнего 14 яруса воронки 5 и направляющей 6 имеется зазор 22. Наличие этих зазоров исключает влияние ярусов воронок 5 друг на друга при определении местоположения опор БПЛА.
Позицией 23 на фиг. 3 обозначена верхняя кромка верхнего 12 яруса воронки 5, которая совпадает с посадочная поверхностью 4а посадочной платформы 4. Посадочная поверхность 4а посадочной платформы 4 может отсутствовать. В этом случае верхняя поверхность 23 верхнего 12 яруса воронок 5 принимается за поверхность посадочной площадки 4а.
На фиг. 3а и 3б изображены графические схема воронок для различных углов наклона и взаимного расположения ярусов воронок посадочной платформы.
Приняты следующие обозначения:
Н3-высота верхнего 12 яруса воронок 5;
Н4 - высота среднего 13 яруса воронок 5;
Н5 - высота нижнего 14 яруса воронок 5;
α1 - угол наклона конуса верхнего 12 яруса воронок 5;
α2 - угол наклона конуса среднего 13 яруса воронок 5;
α3 - угол наклона конуса нижнего 14 яруса воронок 5;
На фиг. 3в-3д показаны варианты изменения линии стока 8 при переходе от одного яруса воронки 5 к другому ярусу.
В зависимости от углов α1, α1, α3 наклона ярусов 12, 13, 14 и расположение их относительно друг друга по высоте при переходе от одного яруса к другому линии 8 стока могут сохранять свое направление, менять угол наклона, принижаться (опускаться) или подниматься ступенчато. На фиг. 3в изображен вариант изменения угла наклона линии стока 8; на фиг. 3г - вариант с принижением линии стока 8; на фиг. 3д - вариант с превышением линии стока 8.
На фиг. 3в показано изменение угла наклона линии стока 8 при переходе от верхнего 12 ярус к среднему ярусу 13. Угол наклона линии стока 8 при переходе от верхнего 12 яруса к среднему 13 ярусу изменился от α1 до α2.
На фиг. 3г показано снижение линии стока 8 при переходе от верхнего 12 яруса воронки 5 к нижнему 13 ярусу 5. Величина снижения равна величине зазора 20 между нижней 18 кромкой верхнего 12 яруса и верхней 19 кромкой среднего яруса 13 воронки 5.
На фиг. 3д показано превышение линии стока 8 при переходе от среднего 13 яруса к нижнему 14 ярусу воронки 5. Величина превышения равна подъема верхней кромки 19 нижнего 14 яруса над нижней 15 кромкой среднего 13 яруса воронки 5.
Высоты Н3, Н4, Н5 ярусов 12, 13,14 разных уровней могут быть как равными (фиг. 3), так и различными (неравными) (фиг. 3а, 3б). Углы α1, α2, α3 конусов ярусов 12, 13, 14 разных уровней воронки 5 могут быть как равными (фиг. 3), так и различными (неравными) (фиг. 3а, 3б).
Один или более ярусов 13, 14 воронки 5 может быть установлен с принижением линии стока 8.
Один или более ярусов 13,14 воронки 5 и направляющие 6 могут быть установлены с превышением линии стока 8.
Такие решения позволяют управлять процессом посадки, обеспечивая беспрепятственный спуск опор 2 БПЛА 1 к центру воронки 5 под воздействием силы тяжести без задержек или перекосов БПЛА 1, или приостанавливая движение для снижения скорости спуска.
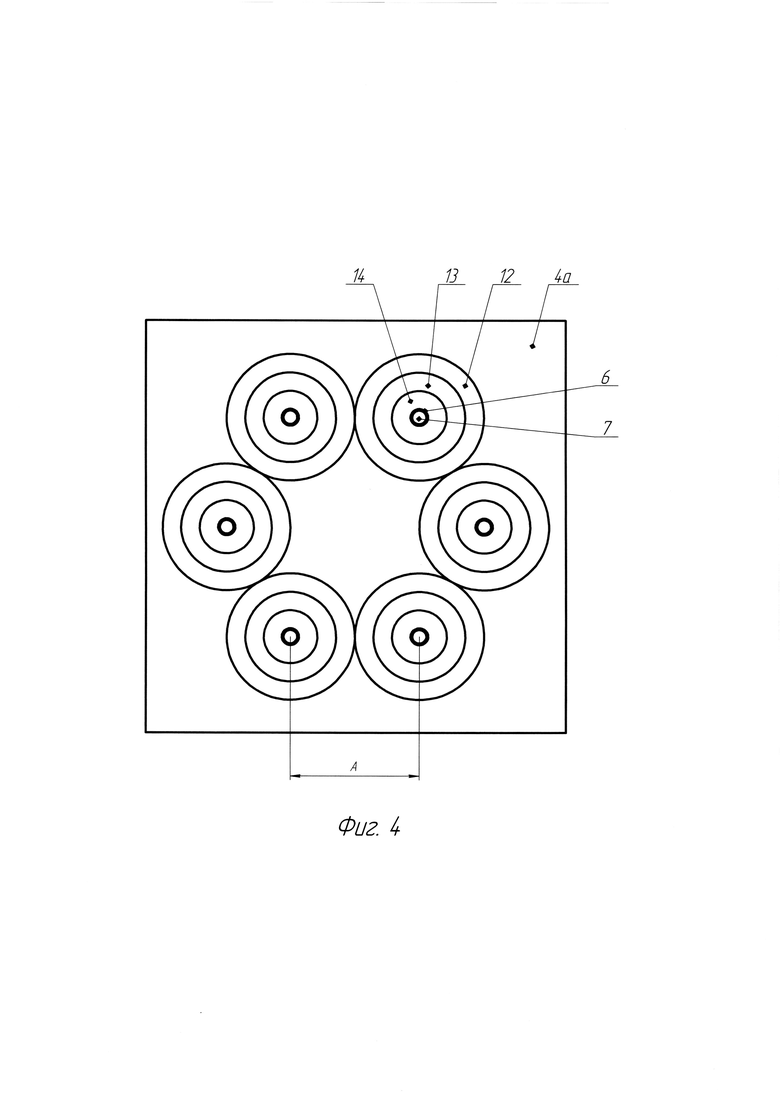
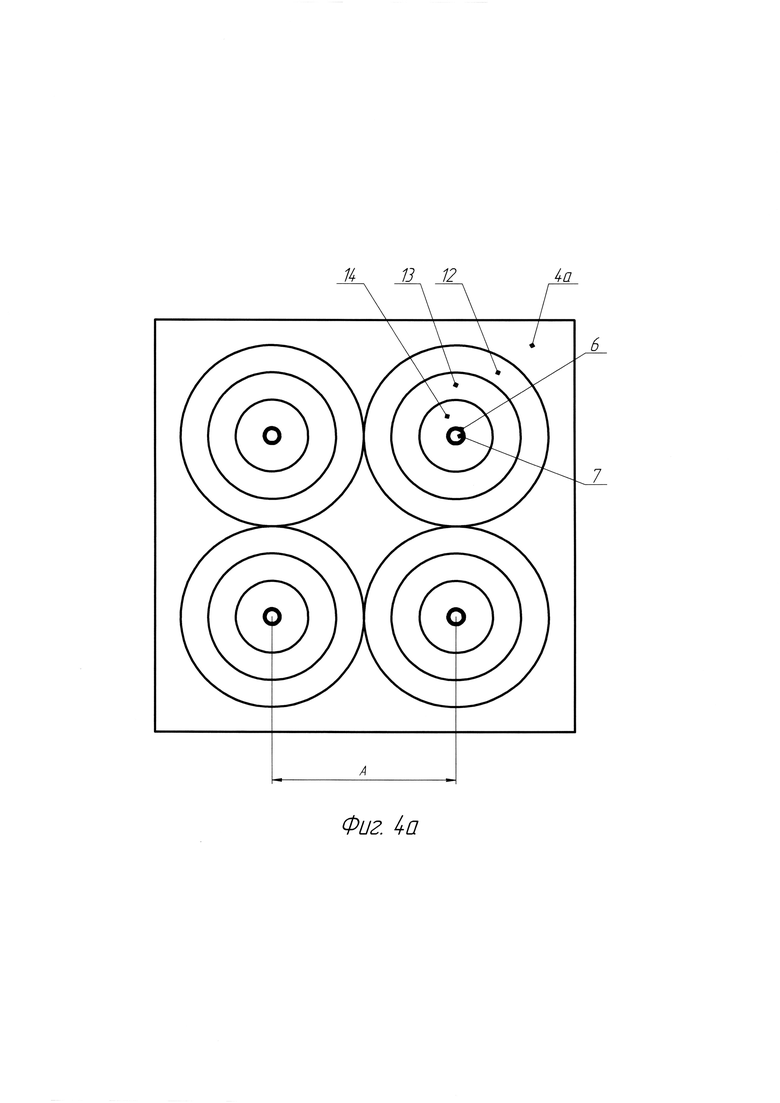
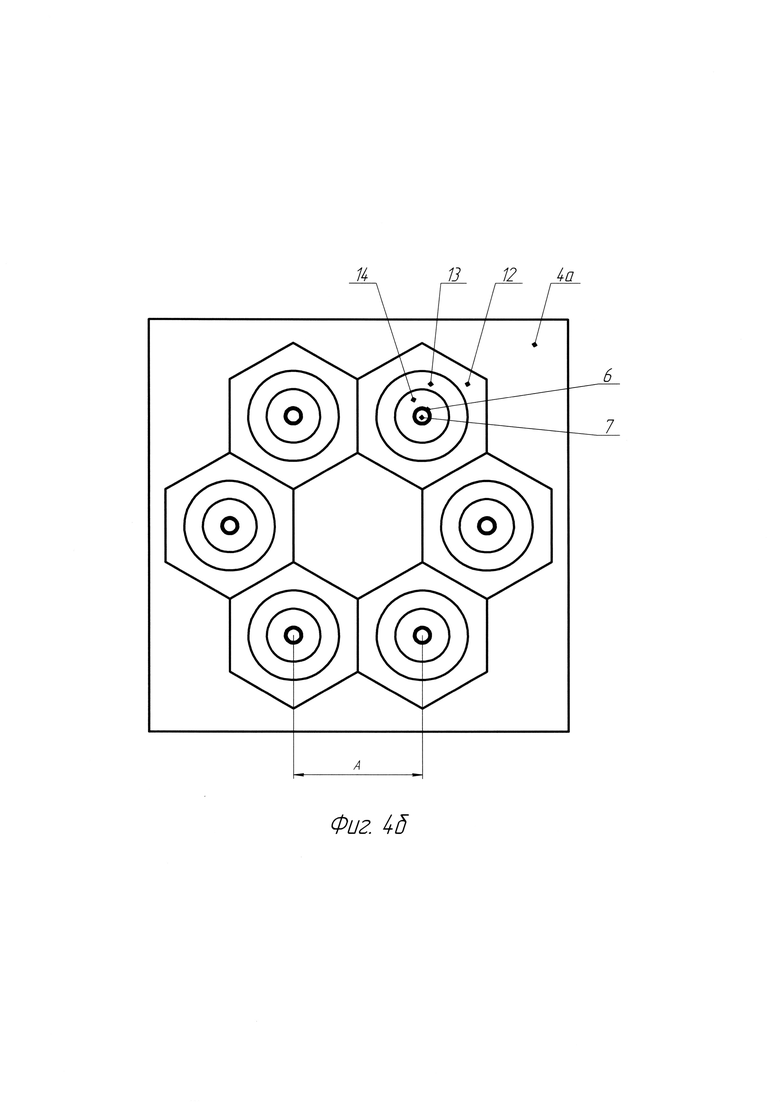
На фиг. 4, 4а, 4б и 4в изображены виды сверху посадочных площадок 4а под различное количество опор 2 принимаемого БПЛА 1 с разбивкой воронок на ярусы 12, 13, 14 и различные формы верхних 23 кромок верхних 12 ярусов воронок 5.
Верхние сечения верхних 12 ярусов всех воронок 5 выполнены одной геометрической формы, при этом в зависимости от количества и расположения опор 2 принимаемого БПЛА 1 могут представлять собой, например, круг, треугольник, квадрат, прямоугольник, равнобедренную трапецию, правильный или неправильный многогранник. Форма (геометрия) данного сечения призвана обеспечить максимально возможное отклонение БПЛА 1, при котором его опоры 2 попадут внутрь этой формы. В процессе движения вниз сечение воронки 5 может меняться и в нижнем сечении должна повторять геометрию верхнего сечения направляющей 6. При этом нижнее сечение более верхнего яруса должно совпадать с верхним сечением более нижнего яруса.
На фиг. 5 изображена графическая схема посадочной платформы 4 после посадки БПЛА 1. Все ярусы 12, 13 и 14 воронок 5 и направляющие 6 сложены (задвинуты друг в друга) телескопически, при этом все верхние 23, 16 и 19 кромки или все нижние 15, 18 и 21 кромки ярусов 12, 13, и 14 воронок 5 могут находиться на одной линии. Основания 7 находятся в нижней части направляющих 6. Такое положение элементов посадочной платформы 4 обеспечивает наименьшее расстояние Н2 от поверхности основания 7 до нижней 11 точки корпуса БПЛА 1 или Н2 от поверхности основания 7 до нижней 10 точки подвешенного на БПЛА 1 груза 3. Как видно из графики это расстояние может сокращается во столько раз, из скольких ярусов выполнена воронка 5.
На фигуре 6 и 7 изображена конструкция посадочной платформы в различных проекциях, реализующая схемы фиг. 3, 4 и 5. На фиг. 8 и 9 изображены разрезы различных вариантов конструкции посадочных платформ 4 по осям двух направляющих 6.
Посадочная платформа 4 содержит базовую плиту 24, над которой последовательно установлены плита 25 с установленными на ней основаниями 7; плита 26 с установленными на ней направляющими 6; плита 27 с установленными на ней нижними 14 ярусами воронок 5; одна или несколько плит 28 с установленными на них промежуточными 13 ярусами воронок 5; плита 29 с установленными на ней верхними 12 ярусами воронок 5. Каждая плита содержит все ярусы одного уровня или все направляющие 6, или все основания 7.
Ярусы 12, 13, 14 одного уровня всех воронок 5, направляющие 6 и основания 7, установленные на посадочной платформе 4, могут быть соединены между собой и иметь линейные приводы (на фиг. не показаны)
Ярусы одного уровня 12, 13, 14 всех воронок 5, направляющие 6 и основания 7, установленные на посадочной платформе 4, могут быть установлены на единые плиты 25-29 и соединены с актуаторами линейных перемещений 30-33. Плита 29 соединена с плитой 28 с помощью актуаторов 30 линейных перемещений; плита 28 соединена с плитой 27 с помощью актуаторов 31 линейных перемещений; плита 27 соединена с плитой 26 с помощью актуаторов 32 линейных перемещении; плита 26 соединена с базовой плитой 24 с помощью стоек 34. Плита 25 соединена с базовой плитой 24 с помощью актуатора 33.
Актуаторами 30-33 линейных перемещении могут быть электрические, пневматические (пневмоцилиндр), гидравлические (гидроцилиндр) или линейные приводы или механизмы иного типа, способные обеспечивать перемещение плит с заданной скоростью. Количество актуаторов линейных перемещений каждой плиты определяется весом конструкции и необходимой динамикой.
Это позволяет одинаковым ярусам 12, 13, 14 всех воронок 5, направляющим 6 и основаниям 7 двигаться синхронно.
Фигуры 6-12 отражают реализацию схемы посадочной платформы 4, при которой направляющие 6 выполнены неподвижными, основания 7 и ярусы 12, 13 и 14 воронок 5 выполнены подвижными относительно вертикальной оси. При такой схеме плита 26 соединена с базовой плитой 24 с помощью стоек 34.
Любой один из ярусов 12 или 13, или 14 воронок 5 может быть установлен неподвижно, остальные ярусы и направляющие 6 выполнены подвижными с соблюдением того же принципа и соответствующим размещением актуаторов линейного перемещения.
При реализации других схем с базовой плитой 24 при помощи стоек 34 соответственной длины соединяется плита, содержащая тот ярус, который для данной конфигурации является неподвижным. Плиты подвижных ярусов 12, 13, 14 воронки 5, направляющих 6 и основании 7 соединены между собой или с базовой плитой 24 с помощью актуаторов линейных перемещении.
На фиг. 6, 7, и 8 неподвижными выполнены плита 26 с направляющими 6. При этом все ярусы 12, 13 и 14 воронок 5 опускаются вниз, а основание 7 перемещается вверх.
Возможно также соединение базовой плиты 24 с каждой из плит 25-29 посредством актуаторов 30-33 линейных перемещении (фиг. 9).
В качестве актуатора 33 линейных перемещении плиты 25 может быть применен привод, способный подбрасывать БПЛА 1 вверх (катапульта). Им может быть, например, пневмоцилиндр большого диаметра, соединенный с компрессором через пневмоаппаратуру большой пропускной способности.
Посадочная платформа содержит датчики, обеспечивающие определение касания опор 2 БПЛА 1 ярусов 12,13,14 воронок 5, направляющих 6 и основании 7. Каждый ярус 12, 13 и 14 воронок 5, каждая направляющая 6 и каждое основание 7 могут быть установлены на датчики 35 определения касания опор, например, датчики веса, которые установлены на соответствующие плиты 25-29. Количество датчиков 35 определения касания опор, например, датчиков веса на каждом ярусе 12, 13, 14 должно выбираться таким образом, чтобы позволить определить наличие нагрузки, приложенной к любой точке данного элемента.
Каждая плита 25-29 может быть установлена на датчики 36 определения касания опор, например, датчики веса, которые соединены с соответствующим актуатором 30-33 линейных перемещении или стойку 34.
Каждый актуатор 30-33 линейных перемещении может быть установлен на датчики веса 37, которые соединены с соответствующей плитой 25-29 или базовой плитой 24.
Наличие зазоров 17, 20, 22 между ярусами 12, 13 и 14 направляющих воронок 5 и направляющих 6 исключает ложные срабатывания датчиков 35, 36, 37.
Возможно также применение датчиков, использующих другие принципы для определения касания опор 2 БПЛА 1 ярусов 12, 13, 13, направляющих 6 и основании 7, например, электроконтактный, оптический, емкостной, вибрационный, датчик давления ит.п., которые могут быть установлены на каждый ярус 12, 13, 14, направляющие 6 и основания 7.
На фиг. 10 изображен вариант выполнения посадочной платформы 4, в котором нижний ярус 14 установлен с превышением линии стока 8 (фиг. 3д). В данной конфигурации верхняя 19 кромка нижнего 14 яруса находится выше нижней 15 кромки среднего 13 яруса. Величина превышения выбрана таким образом, что яруса образуют барьер для дальнейшего спуска опор 2 БПЛА 1. Такое решение позволяет приостанавливать движение опор 2 БПЛА 1 и тем самым снизить скорость движения опор 2 БПЛА 1 при входе в направляющие 6. Посадочная платформа 4 может иметь несколько ярусов воронок 5, установленных с превышением линии стока 8.
На фиг. 11 изображен вариант выполнения посадочной платформы, в котором верхняя 23 кромка верхнего 12 яруса воронки 5 выполнена квадратной, а нижняя 18 кромка выполнена скругленной. Верхняя 16 кромка промежуточного 13 яруса воронки 5 выполнена как нижняя 15 кромка верхнего 12 яруса воронки 5 и имеет переходную форму, позволяющую плавно перейти к верхней 19 кромке нижнего 14 яруса, имеющего круглое сечение. Сечение воронки 5 при движении вниз плавно переходит от квадрата в круг.
Форма верхнего сечения воронок 5 зависит от количества и формы расположения опор 2 БПЛА 1 и призвана обеспечить максимально возможное отклонение БПЛА 1, при котором его опоры 2 попадут внутрь этой формы. Это может быть треугольник, квадрат, прямоугольник, равнобедренная трапеция, правильный или неправильный многогранник.
На фиг. 12 изображен вариант выполнения посадочной платформы 4, у которой воронки установлены так, что верхние кромки 23, 16, 19 всех ярусов 12, 13, 14 воронки 5 и направляющих 6 расположены на одном уровне. При этом ширина Т ярусов воронок 5 (шаг размещения вершин) (фиг. 13) меньше диаметра dk контактной поверхности 38 опор 2 принимаемого БПЛА 1.
На фиг. 15 изображено сечение посадочной платформы 4 по фиг. 12 по осям направляющих 6. Посадочная платформа содержит базовую плиту 24 над которой установлена плита 25 с основаниями 7, плита 26 с направляющими 6 и ярусами 12, 13, 14. Каждый ярус 12, 13, 14 соединен с актуатором 39 линейных перемещении, закрепленными на плите 26, которая установлена на базовой плите 24 на стойках 34. Плита основании 25 соединена с базовой плитой 24 с помощью актуатора 33 линейных перемещении, которая выполнена в виде пневмоцилиндра большого диаметра.
На фиг. 14 изображен вариант выполнения посадочной платформы, реализующей решения согласно фиг. 12, у которой ярусы 12, 13 выполнены в виде многоугольника. Нижний ярус 14 имеет переход с квадрата на круг. Форма ярусов 12, 13, 14 воронок 5 выбирается в зависимости от количества и формы расположения опор 2 БПЛА 1 и призвана обеспечить максимально возможное отклонение БПЛА 1, при котором его опоры 2 попадут внутрь этой фигуры. Это может быть треугольник, квадрат, прямоугольник, равнобедренная трапеция, правильный или неправильный многогранник.
На фиг. 16 изображена посадочная платформа 4, в которой ярусы 12, 13, 14 воронки 5 обрамляют посадочную площадку 4а, выполненную в виде многогранника, соединяющего направляющие 6, при этом поверхность посадочной площадки 4а, направляющие 6 и верхние 23, 16, 19 кромки ярусов 12, 13,14 установлены на одном уровне, ширина тела ярусов 12, 13, 14 воронки 5 меньше диаметра контактной поверхности опоры 2 БПЛА1.
Каждый ярус 12, 13, 14 воронки 5 установлен на плите 26 и приводится в движение посредством одного или нескольких актуаторов 39 линейных перемещений. Плита 26 установлена на плиту 24 на стойках 34.
Верхний 12 ярус воронки 5 перед посадкой БПЛА 1 может быть поднят вверх или установлен выше остальных ярусов. Это позволяет исключить выход опор 2 за пределы яруса 12 уже на этапе посадки. Опора 2, оказавшаяся над ярусом 12 будет передвинута им к центру посадочной площадки 4а уже в процессе посадки.
Направляющие 6 содержат устройства для удержания БПЛА 1, например, механический, пневматический или гидравлический зажим для фиксации и удержания опор 2 БПЛА 1. Это позволяет использовать посадочую платформу на подвижных объектах На фиг. 17 изображена направляющая 6, выполненная в виде цанги. Корпус 40 направляющей 6 имеет продольные разрезы 41, которые делят его на сектора 42, наружная часть корпуса 40 имеет коническую поверхность 43. На корпус 40 надето кольцо 44 с ответной 43а конической частью. Кольцо 44 соединено с линейным приводом (не показано). При движении кольца 44 конические поверхности 43 и 43 а корпуса 40 и кольца 44 взаимодействуют между собой, толкают сектора 42 к центру, сжимая опору 2 БПЛА 1. Возможен иной механизм зажима цанги.
На фиг. 18 изображена направляющая 6, содержащая пневматический зажим. В корпусе 40 направляющей 6 выполнена внутренняя кольцевая проточка 45, куда установлен гибкий элемент 46. К внутренней кольцевой проточке 45 через отверстие 47 подведен штуцер 48 для подключения к пневоаппаратуре. Соединение корпуса 40 направляющей 6 с гибким элементом 46 должно быть герметично.
На фиг. 19 изображено основание 7 направляющих 6 со штыревым контактом 50, например, типа banana pin. Корпус 49 выполнен полым и в него установлен актуатор 51 линейных перемещении, на шток 52 которого установлен штыревой контакт 50. К штыревому контакту соединен провод подачи напряжения (не изображен). На шток 52 актуатора 51 линейных перемещений может быть установлено несколько штыревых контактов 50.
На рис. 20 изображен привод для катапультирования БПЛА1 при взлете. Привод выполнен в виде мембранного пневмоцилиндра 33 большого диаметра. Корпус 54 пневмоцилиндра 33 установлен на базовой плите 24, шток 55 соединен с плитой 25 на которой установлены основания 7. В нормальном состоянии мембрана 56 опущена вниз за счет усилия пружины 58. Пневмоцилндр содержит штуцер 57, куда подается давление воздуха. Схема пневматическая содержит клапан 59, обеспечивающий высокий расход воздуха и ресивер 61, которые используются при работе пневмоцилиндра как катапульты и малорасходный клапан 60, соединенный с сетью через редуктор 62, применяемый при использовании пневмоцилиндра 33 как привода основании 7. Поз. 53 обозначена штоковая полость пневмоцилиндра 33.
Выбор мембранного пневмоцилиндра обусловлен тем, что он отличается малой массой подвижных частей и большой площадью мембраны 56, что позволяет создавать большое динамическое усилие, которое требуется для работы катапульты. В качестве привода катапульты могут быть использованы другие виды механизмов, обеспечивающих большое динамическое усилие для выталкивания БПЛА. Например, это может быть предварительно нагруженная пружина большого усилия.
Кроме указанных элементов посадочная платформа для БПЛА содержит блок управления, блок зарядки аккумуляторов БПЛА, графический маркер или источник излучения для обеспечения точной посадки БПЛА, иные устройства, обеспечивающие его функционирование (не показаны).
На фиг. 21 приведена посадочная платформа 4 при запуске БПЛА 1. Ярусы 12, 13, 14 воронок 5 сложены телескопически. Основание 7 направляющих 6 подняты в верхнее положение. Соответственно, БПЛА 1 поднято от посадочной плоскости 4а. Это снижает влияние посадочной плоскости 4а на работу его воздушных винтов и снижает нестабильность тяги, вызванную этим эффектом (эффект экранирования). Поэтому взлет происходит более надежно и стабильно.
Посадочная платформа для БПЛА вертикального взлета и посадки работает следующим образом.
Посадка. БПЛА 1 подлетает к месту посадки, ориентируясь по спутниковой навигации или показания собственной инерционной навигации. Далее производится определение точного места посадки и посадка БПЛА 1, ориентируясь по установленной на БПЛА1 видеокамере на изображение посадочной площадки, графического маркера, изображенного на поверхности посадочной площадки 4а или источника излучения, установленного на посадочной платформе 4. Точность посадки БПЛА 1 определяется методом определения места посадки, динамическими характеристиками БПЛА 1, условиями освещенности, метеорологическими условиями посадки, особенно порывистым ветром и видимостью. Посадка БПЛА 1 пройдет успешно и опоры 2 БПЛА 1 войдут в соответствующие направляющие 6 и встанут на соответствующие основания 7 в том случае, если каждая опора 2 попадет, по крайней мере, на верхний 12 ярус соответствующей воронки 5.
Очевидно, что чем больше площадь воронки 5, на которую производится посадка опоры 2, тем выше надежность посадки. Вариант выполнения верхнего 12 яруса воронки 5 в виде многогранника на фиг. 46, 4в, 11, 14 и 16 увеличивает площадь поверхности для успешной посадки по сравнению с кругом того же размера. В частности, для квадрата это увеличение составит 26%, для шестигранника -10%.
В зависимости от точности посадки опоры 2 БПЛА 1 коснутся одного из ярусов 12, 13, 14 соответствующей воронки 5. Моменты касания опор 2 зависят от наклона БПЛА 1. Момент касания и присутствие опоры на любом из ярусов 12,13 или 14 определяется датчики определения касания опор 35, 36, 37.
Работа посадочной платформы 4, у которой направляющие 6 выполнены неподвижными, ярусы 12, 13 и 14 воронок 5 подвижным относительно вертикальной оси (см. фиг. 8 и 9).
Коснувшись опорами 2 любого из ярусов 12, 13, 14 воронок 5 БПЛА 1 продолжает посадку. Каждая опора 2 скользит вниз по соответствующему ярусу воронки 5, например, с верхнего 12 яруса к промежуточному 13 ярусу. После прохождения опорами 2 в более нижний ярус воронки 5, более верхний ярус опускается вниз. Например, если все опоры 2 прошли верхний 12 ярус, соскользнули к промежуточному 13 ярусу, то верхний 12 ярус опускается вниз совместно с платформой 29 посредством актуаторов 30 линейных перемещений. Скорость опускания ярусов 12, 13, 14 воронок 5 должна быть подобрана близкой к скорости опускания БПЛА 1 или выше. Если первое касание опор 2 будет на более нижних ярусах, например, на нижний 14 ярус воронок 5, то верхние ярусы 12, 13 воронок 5 сразу опускаются вниз на повышенной скорости.
Опоры 2 могут касаться одновременно разных ярусов 12, 13, или 14 воронок 5. В этом случае соответствующие ярусы приводятся в движение только после полного соскальзывания опор 2, т.е. после соскальзывания последней опоры 2 с данного яруса. Например, одна опора 2 БПЛА 1 коснулась одной из четырех воронок 5 верхнего 12 яруса, а остальные опоры 2 опустились на промежуточные 13 ярусы трех других воронок 5. В этом случае верхние 12 ярусы ожидают пока опора 2 не соскользнет до 13 яруса, и только после этого все верхние 12 ярусы одновременно опускаются вниз.
Работа посадочной платформы, в которой верхние 12 ярусы воронок 5 выполнены неподвижными, остальные ярусы 13 и 14, направляющие 6 и основания 7 выполнены подвижными относительно вертикальной оси.
После касания опорой 2 любого яруса 12,13 или 14 и после прохождения последней опоры верхнего яруса 12 все ярусы воронок 5, кроме верхнего 12, а также направляющие 6 и основания 7 синхронно приводятся в движение вверх. Движение продолжается до тех пор, пока ярус воронки 5, на котором находится в данный момент опора 2 БПЛА 1 не окажется в верхнем положении. После прохода опоры 2 БПЛА 1 расположенного в верхнем положении яруса воронки движение возобновляется. И так до достижения опорой 2 направляющих 6 и основании 7.
Такой вариант работы посадочной платформы позволяет быстро загасить скорость снижения БПЛА 1 и производить позиционирование менее динамично.
В посадочной платформе 4, в которой один из ярусов 12, 13 или 14 выполнен неподвижным, остальные подвижными относительно вертикальной оси, движение ярусов воронок 5 верхних относительно неподвижного яруса воронки 5 происходит аналогично работе посадочной платформы, направляющие 6 которых выполнены неподвижным, ярусы воронок 12, 13 и 14 выполнены подвижным относительно вертикальной оси; движение ярусов воронок нижних относительно неподвижного яруса воронки 5 происходит аналогично работе посадочной платформы, верхний ярус 12 которой выполнен неподвижным, остальные яруса 13, 14 и направляющие 6 выполнены подвижным относительно вертикальной оси.
Выполнение ярусов 12, 13,14 воронок 5 с различным углом наклона линии стока 8 (фиг. 3а, 3б, 3в) позволяет управлять процессом посадки. Например, (фиг. 3а) более высокий угол наклона линии стока 8 верхнего яруса 12 воронки 5 позволяет снизить горизонтальную составляющую скорости БПЛА 1, исключает возможность его вылета из воронки 5. Напротив, более пологий угол линии стока 8 в нижнем 14 ярусе воронки 5 позволяет снизить скорость опускания БПЛА 1, что позволяет каждой опоре 2 плавно, без ударов войти в соответствующую направляющую 6.
Установка (фиг. 3б) более нижних ярусов воронок 5 и направляющих 6 с принижением линии стока 8 по отношению к верхним ярусам исключает возможные задержки опор 2 на стыках ярусов и приводит к более плавному опусканию БПЛА 1.
Центрирование опор 2 БПЛА 1 связано с боковым движением БПЛА 1. После прохождения всех ярусов воронки 5 опора 2 должна плавно войти в направляющую 6, которая останавливает боковое движение и может явиться причиной опрокидывания БПЛА 1, если боковая скорость достаточно высока. Один или несколько ярусов 13 или 14 воронок 5 и направляющие 6 могут быть установлены с превышением линии стока 8 и образовать барьер для дальнейшего скатывания опор 2 БПЛА 1. Это останавливает движение БПЛА 1 и не дает ему сильно разогнаться. После остановки БПЛА 1 данные яруса воронок 5 или направляющие 6 опускаются вниз и пропускают опоры 2 БПЛА 1 далее вниз. В результате этого опоры 2 подходят к направляющим 6 имея невысокую скорость, что снижает динамические воздействия при входе опор 2 в направляющие 6.
Пройдя все ярусы воронок 5 опоры 2 БПЛА 1 попадают в направляющие 6. Движение опор 2 относительно внутренних стенок направляющих 6 может быть затруднено или остановлено, если произойдет перекос. Наиболее надежным является контролируемый вход опор 2 в направляющие 6, когда основания 7 посадочной платформы 4 перед посадкой БПЛА 1 подняты в верхнее положение 7а (фиг. 3), а после касания всех опор 2 своих основании 7 они синхронно опустятся вниз, исключая возможные перекосы.
Закрепление БПЛА.
Закрепление опор 2 БПЛА 1 в направляющих 6 позволяет эксплуатировать посадочную платформу 4 на подвижных объектах, например, на автомобилях. Закрепление также позволяет установить надежное электрическое соединение БПЛА 1 с посадочной платформой штыревыми контактами 50. Такие контакты, как правило, требуют усилия для ввода штыревых контактов 50 в розетки. Закрепление опор 2 в направляющих 6 производится после полного опускания опор 2 БПЛА 1 в направляющие 6 на основания 7 и опускания основании 7 в нижнее положение.
В варианте, когда направляющие 6 выполнены в виде цанги (фиг. 17) кольцо 44 перемещается посредством линейного привода (не показан) по корпусу 40, при этом происходит взаимодействие конических поверхностей 43 и 43а, в результате которого сектора 43 сходятся к центру и сжимают опору 2 БПЛА 1.
В варианте исполнения направляющих 6 с пневматическим зажимом (фиг. 18) к внутренней проточке 45 корпуса 40 направляющей 6 через отверстие 47 и штуцер 48 подается сжатый воздух. Гибкий элемент 46 раздувается и своей внутренней стенкой охватывает опору 2 БПЛА1.
Электрическое соединение БПЛА с посадочной платформой для зарядки аккумулятора или связи с ним.
После закрепления опор 2 БПЛА1 в направляющих 6 производится выдвижение штыревых контактов 50 с помощью актуатора 51 линейных перемещении. Штыревые контакты 50 входят в розетки (не показано), расположенные на опорах 2 БПЛА 1. Такие контакты обеспечивают надежное соединение в условиях вибрации и позволяют подавать большие токи. На каждом основании 7 может быть один или более штыревой контакт 50, перемещаемые совместно актуатором 51 линейных перемещении.
Работа вариантов исполнения посадочной платформы 4, как показано на фиг. 12, 14, 16.
Данные конфигурации посадочных платформ 4 работают по принципу сходящейся волны, которая несет опоры 2 к направляющим 6. После посадки БПЛА 1 производится поочередный подъем каждого яруса 12, 13, 14 воронок 5, начиная с яруса 12, который является наружным. При подъеме каждого из ярусов 12, 13, 14 воронки 5 опоры 2, находящийся в зоне данного яруса воронки 12, 13, или 14 будет сдвигаться к центру за счет взаимодействия с наклонной поверхностью данного яруса и, в конечном счете, попадут в направляющие 6.
Схема движения ярусов воронок: поднимается ярус 12, опора 2 соскальзывает на ярус 13, затем поднимается первый из ярусов 13, ярус 12 опускается вниз, затем поднимается следующий из ярусов 13, и после подъема его первый из ярусов 13 опускается и т.д. Таким образом, не возникает момента, когда опоры 2 БПЛА 1 могут по какой-либо причине выйти за ту часть ярусов 12, 13 или 14, которые сдвинула его ближе к центру. Это позволяет надежно произвести успешное центрирование опор 2.
Верхние ярусы 12 воронок 5, установленные перед посадкой БПЛА 1 выше остальных, позволяет повысить надежность посадки БПЛА 1 за счет того, что исключает возможность вылета БПЛА 1 за пределы посадочной платформы 4 после посадки, если она имеет высокую боковую скорость. Ширина тела ярусов 12 воронок 5 может быть больше ширины тела остальных ярусов 13 и 14, что также позволяет расширить зону удачной посадки.
Следует отметить, что позиционирование БПЛА 1 в данной конфигурации посадочной платформы происходит гарантированно при последовательном подъеме-опускании всех ярусов 12,13,15 воронок 5. В связи с этим данная конфигурация не требует датчиков касания каждых ярусов воронок 5 и можно ограничиться одним датчиком веса, который показывает факт посадки БПЛА. Это может быть датчик веса, установленный на стойке 34, на который установлена плита 26.
Взлет БПЛА с посадочной площадки.
Известно, что БПЛА вертикального старта испытывают определенные сложности при отрыве от посадочной платформы. Это связано с взаимодействием воздушных потоков, идущих от винта, с плоскостью посадочной площадки. Чем выше расположение воздушных винтов, тем это взаимодействие меньше. Данная посадочная платформа позволяет находиться над посадочной плоскостью 4а на полную высоту опор 2, а также выдвигать вверх основания 7 (см. фиг. 21). Это позволяет облегчить взлет БПЛА 1 с двух точек зрения. Во-первых, поднимает воздушные винты БПЛА 1 выше посадочной площадки 4а, во-вторых, обеспечивает равномерное, без перекосов, выдвижение опор 2 из направляющих 6, чем предотвращает возможные заклинивания и неудачный старт.
Для взлета БПЛА 1 производится разъединение штыревых контактов 50 от розеток опор 2 БПЛА 1 путем перемещения их с помощью актуатора 51 линейных перемещении вниз, далее происходит расфиксирование опор 2 БПЛА 1 от направляющих 6.
В варианте, когда направляющие 6 выполнены в виде цангового зажима (фиг. 17) производится разжим цанги путем перемещения кольца 44 вниз, при котором происходит разделение конических поверхностей 43 и 43а, сектора 42 направляющей 6 под действием сил упругости расходятся от центра и разжимают опору 2 БПЛА 1.
В варианте исполнения направляющих с пневматическим зажимом (фиг. 18) во внутренней проточке 45 через отверстие 47 и штуцер 48 сбрасывается давление воздуха. Гибкий элемент 46 сдувается, и его внутренняя стенка отпускает опору 2 БПЛА 1.
Подъем БПЛА 1 перед взлетом.
Через клапан 60 и редуктор 62 подается воздух в мембранную полость пневмоцилиндра 33, и шток 55 пневмоцилиндра 33 поднимает плиту 25 с основаниями 7. БПЛА 1 запускает двигатели и к моменту окончания подъема основания 7 взлетает с посадочной платформы.
Запуск БПЛА катапультированием.
Запуску катапультированием предшествуют разъединение штыревых контактов 50 от розеток опор 2 БПЛА 1 и расфиксирование опор 2 БПЛА 1 от направляющих 6. Причем расфиксирование опор 2 БПЛА 1 может быть частью катапультирования, при котором до расфиксирования опор 2 в пневмоцилиндр 33 подается давление воздуха и шток 55 пневмоцилиндра 33 набирает достаточную силу выталкивания.
Для катапультирования открывается клапан 59, обеспечивающий высокий расход воздуха из ресивера 61 в пневмоцилиндр 33. Воздух высокого давления попадает в мембранную полость пневмоцилиндра 33, и шток 55 с большой силой толкает плиту 25 с основаниями 7. Основания 7 силой толкают опоры 2 БПЛА 1 и за время хода основании 7 придают БПЛА 1 скорость, достаточную для подбрасывания его вверх. БПЛА 1 раскручивает воздушные винты во время выталкивания из направляющих 6 и после подбрасывания имеет достаточную тягу для дальнейшего продолжения взлета.
Таким образом, выполнение воронок многоярусными с возможностью складывания (осевого перемещения) позволило расширить возможности посадочной платформы для приема БПЛА с низким клиренсом или низким подвесом груза.
Выполнение верхних сечений верхних ярусов воронок, в зависимости от количества и расположения опор принимаемого БПЛА, в виде различных геометрических форм, например, круга, треугольника, квадрата, прямоугольника, равнобедренной трапеции, правильного или неправильного многогранника упрощает процесс посадки и повышает надежность выполнения посадки за счет расширения допустимого отклонения при посадке БПЛА.
Закрепление опор БПЛА в направляющих обеспечивает надежную фиксацию БПЛА на посадочной платформе и дает возможность использования посадочной платформы на подвижном объекте.
Предварительный подъем БПЛА перед взлетом и катапультирование повышают надежность взлета БПЛА с посадочной платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| Способ приземления БПЛА на посадочную платформу | 2020 |
|
RU2739636C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем (варианты) | 2022 |
|
RU2788099C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |
Посадочная платформа БПЛА содержит многоярусные воронки с возможностью телескопического складывания определенным образом, направляющие и основания. Обеспечивается расширения возможностей посадочной платформы для возможности приема БПЛА с низким клиренсом или низкой посадкой подвешенного груза. 22 з.п. ф-лы, 31 ил.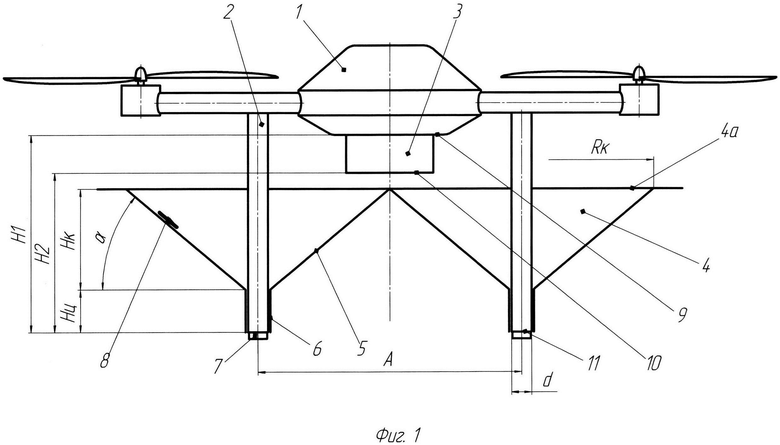
1. Посадочная платформа БПЛА, содержащая воронки, направляющие и основания, отличающаяся тем, что каждая воронка выполнена многоярусной с возможностью телескопического складывания.
2. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что ярусы одного уровня всех воронок имеют равные высоты и углы конуса.
3. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что высоты ярусов разных уровней могут быть равными
4. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что высоты ярусов разных уровней могут быть различными.
5. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что углы конусов ярусов разных уровней могут быть равными.
6. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что углы конусов ярусов разных уровней могут быть различными.
7. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что направляющие отделены от нижних ярусов воронок.
8. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что основания выполнены подвижными.
9. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что верхние сечения всех воронок выполнены одной геометрической формы.
10. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что все ярусы воронок могут быть выполнены подвижными, а направляющие выполнены неподвижными.
11. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что один из ярусов воронок выполнен неподвижным, остальные ярусы и направляющие выполнены подвижными.
12. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что ярусы одного уровня всех воронок, направляющие и основания могут быть соединены между собой и иметь линейные приводы.
13. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что ярусы одного уровня всех воронок, направляющие и основания могут быть установлены на единые плиты и соединены с актуаторами линейных перемещений.
14. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что на каждый ярус, направляющую и основание могут быть установлены датчики определения касания опор БПЛА.
15. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что по крайней мере один из ярусов установлен с принижением линии стока.
16. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что по крайней мере один из ярусов установлен с превышением линии стока.
17. Посадочная платформа БПЛА по 1, отличающаяся тем, что все ярусы воронок могут быть установлены т.о., что верхние кромки расположены на одном уровне, при этом ширина тела ярусов воронок меньше диаметра контактной поверхности опоры БПЛА.
18. Посадочная платформа БПЛА по п. 1, отличающаяся тем, что ярусы воронки обрамляют посадочную площадку, выполненную в виде многогранника, соединяющего направляющие, при этом поверхность посадочной площадки, направляющие и верхние кромки ярусов установлены на одном уровне, ширина тела ярусов воронки меньше диаметра контактной поверхности опоры БПЛА.
19. Посадочная платформа для БПЛА по п. 1, отличающаяся тем, что направляющие содержат устройства для удержания БПЛА.
20. Посадочная платформа для БПЛА по п. 1, отличающаяся тем, что направляющие могут быть выполнены в виде цангового зажима.
21. Посадочная платформа для БПЛА по п. 1, отличающаяся тем, что направляющие могут содержать пневматические зажимы.
22. Посадочная платформа для БПЛА по п. 1, отличающаяся тем, что по крайней мере часть оснований направляющих могут содержат не менее одного выдвигаемого штыревого контакта, например контакт типа banana pin
23. Посадочная платформа для БПЛА по п. 1, отличающаяся тем, что подвижные основания направляющих могут быть связаны с приводом для катапультирования БПЛА из посадочной платформы, например, пневмоцилиндром.
| US 20180370652 A1, 27.12.2018 | |||
| CN 0207595287 U, 10.07.2018 | |||
| CN 103287587 A, 11.09.2013 | |||
| RU 2016142124 A, 26.04.2018. |

