Изобретение относится к способу приземления БПЛА вертикального взлета и посадки на посадочную платформу и может быть использовано для создания посадочных платформ для приема, хранения и обслуживания БПЛА.
Известны технические решения, в которых раскрыт способ приземления БПЛА вертикального взлета и посадки на посадочную платформу, при котором БПЛА находит местоположение посадочной платформы, определяет точку приземления и приземляется на посадочную площадку, а после приземления БПЛА посадочная платформа позиционирует и закрепляет БПЛА на посадочной площадке и производит необходимое обслуживание (US 20140319272 А1, WO 2017221235 А1, CN 106904288 В).
Известен способ приземления БПЛА вертикального взлета и посадки при котором, посадочная платформа устанавливается на точку приземления БПЛА, а БПЛА находит местоположение посадочной платформы, определяет точку приземления и приземляется на посадочную площадку (WO 2017185378 A1). После приземления БПЛА посадочная платформа позиционирует и закрепляет БПЛА на посадочной площадке и производит необходимое обслуживание.
Недостатком данного способа является невысокая точность и надежность приземления при сложных метеорологических условиях и при приземлении на посадочную платформу, находящуюся на подвижном объекте. БПЛА стремится приземлиться на точку приземления и иметь при приземлении горизонтальную ориентацию, требуемое направление и невысокую вертикальную скорость приземления. Однако, вследствие таких неблагоприятных факторов, как плохая видимость, порывистый ветер, недостаточная точность определения точки приземления, несовершенство управления и т.п. БПЛА совершает неточное приземление, его вертикальная скорость может отличаться от требуемой и БПЛА при приземлении может иметь ориентацию в пространстве отличную от ориентации посадочной площадки. Это может удлинить время позиционирования и закрепления БПЛА после приземления, привести к жесткому приземлению и возможному отскоку БПЛА после приземления, также имеется риск повреждения стоек шасси БПЛА при посадке его с наклоном к горизонту.
Техническая проблема заключается в:
- повышении точности и надежности приземления БПЛА на посадочную платформу.
- повышении безопасности приземления для БПЛА путем обеспечения безударного приземления на все стойки шасси БПЛА и исключения отскоков БПЛА после приземления.
- повышении быстродействия посадочной платформы после приземления БПЛА на посадочную площадку путем немедленного закрепления БПЛА после приземления с последующим позиционированием.
- обеспечении посадки при сильном ветре или при движении посадочной платформы.
Технический результат обеспечивает способ приземления БПЛА на посадочную платформу, заключающийся в том, что БПЛА находит местоположение посадочной платформы, определяет планируемую точку приземления на посадочной площадке, расположенной на посадочной платформе, и приземляется на посадочную площадку, в соответствии с предложенным решением в процессе приземления БПЛА посадочная платформа отслеживает местоположение приземляющегося БПЛА относительно своего расположения и параметры полета, на основании полученных данных определяет в реальном времени ожидаемую точку приземления БПЛА и ориентацию БПЛА в пространстве на момент приземления, затем перемещает посадочную площадку в ожидаемую точку приземления БПЛА и изменяет ее пространственную ориентацию в соответствии с ожидаемой пространственной ориентацией приземляющегося БПЛА.
Кроме того, непосредственно перед приземлением БПЛА посадочная площадка может осуществлять движение вниз, удерживая разность вертикальных скоростей БПЛА и посадочной площадки не более заданной величины.
Кроме того, непосредственно перед приземлением БПЛА посадочная площадка может осуществлять движение вниз, при этом разность вертикальных скоростей БПЛА и посадочной площадки стремится к нулю к моменту касания БПЛА посадочной площадки.
Кроме того, с момента приземления БПЛА до завершения захвата БПЛА захватными устройствами посадочная площадка начинает торможение с заданной величиной направленного вверх ускорения, а после полного торможения посадочная площадка сохраняет заданное ускорение и начинает движение вверх.
Кроме того, при наличии ветра, посадочная платформа с момента приземления БПЛА до момента захвата может удерживать наклон посадочной площадки в сторону ветра.
Кроме того, дополнительно посадочная платформа может определять величину возможного отклонения БПЛА от ожидаемой точки приземления и изменяет в реальном времени диаметр отверстия захватного устройства на величину возможного отклонения БПЛА от ожидаемой точки приземления.
Кроме того, после приземления БПЛА на посадочную площадку сначала происходит захват БПЛА, а затем позиционирование.
Сущность изобретения раскрывается следующим графическим материалом.
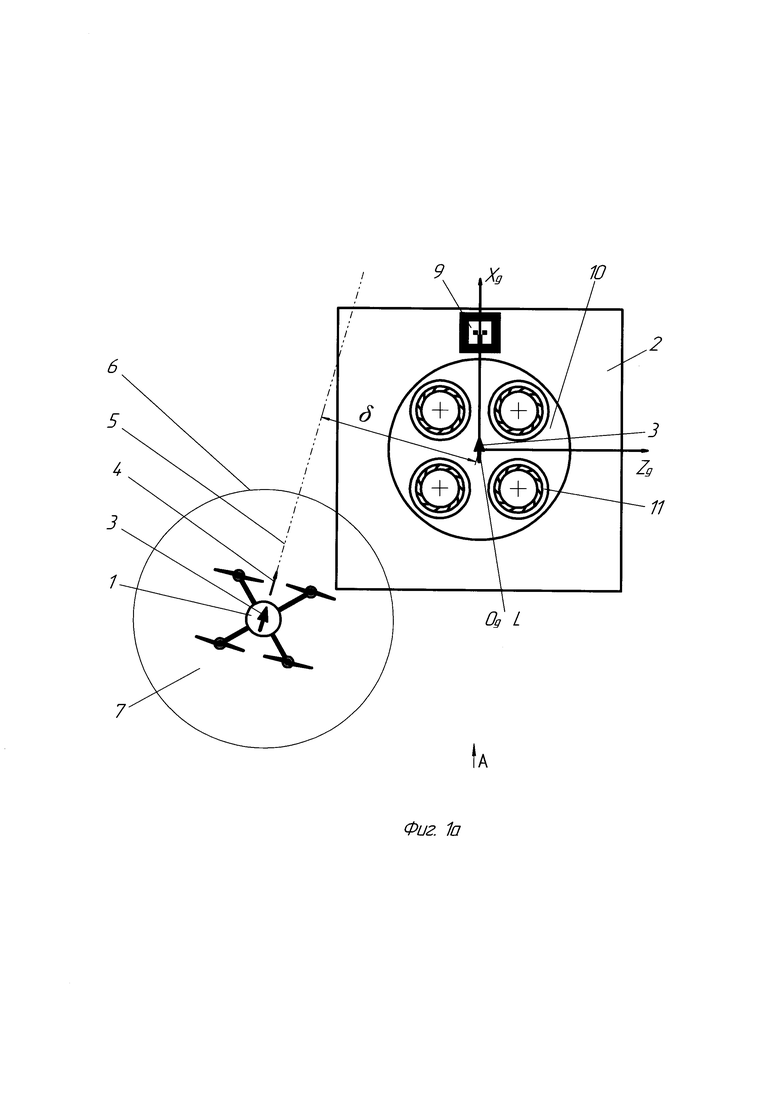
На фиг. 1а схематично изображен вид сверху расположения БПЛА и посадочной платформы в момент подлета БПЛА к посадочной платформе.
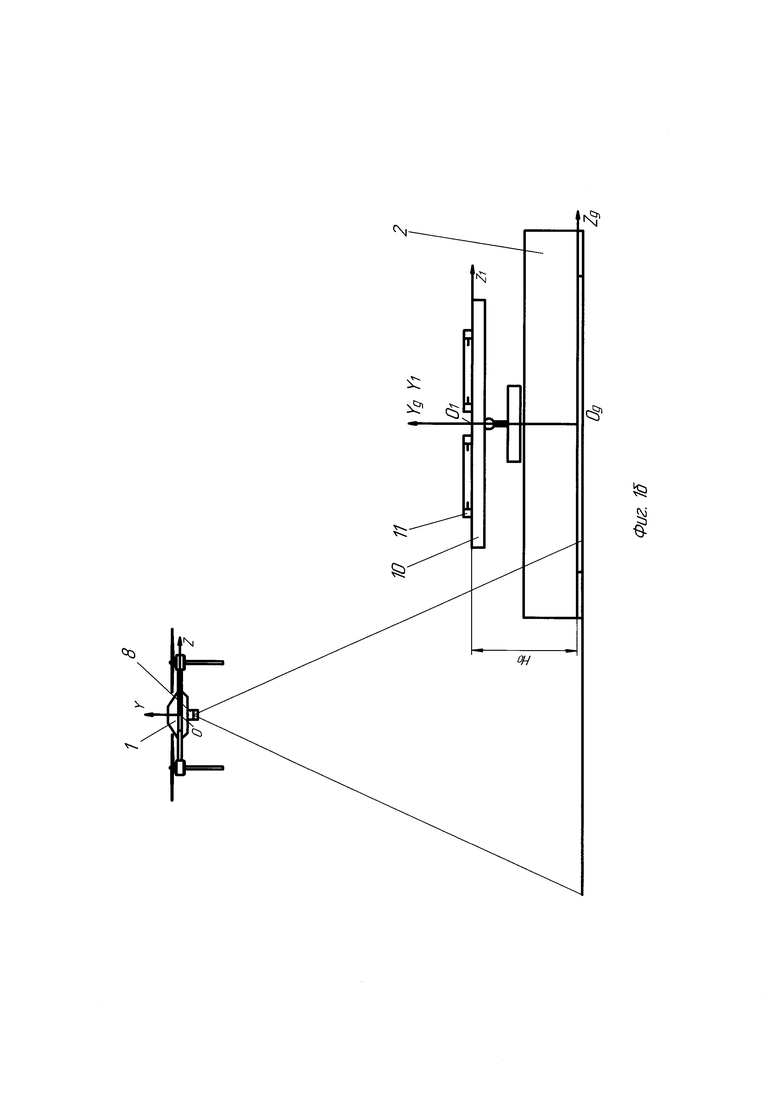
На фиг 1б изображен вид по стрелке А фиг. 1а.
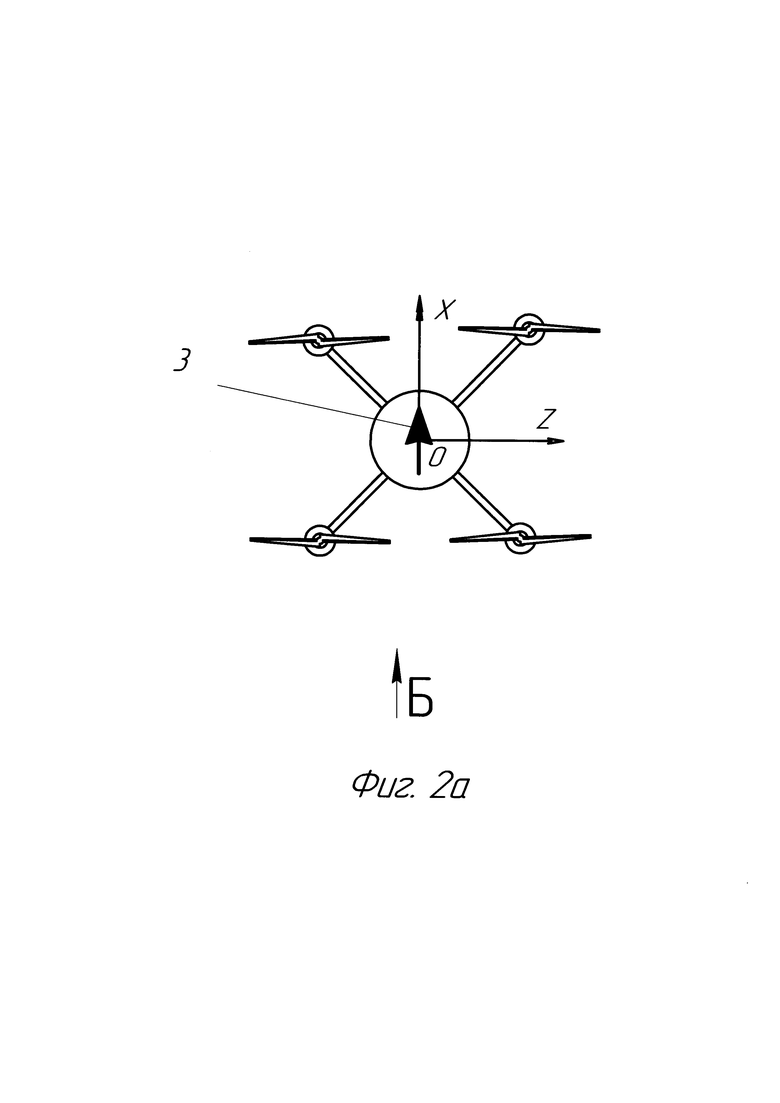
На фиг. 2а изображен БПЛА вид сверху.
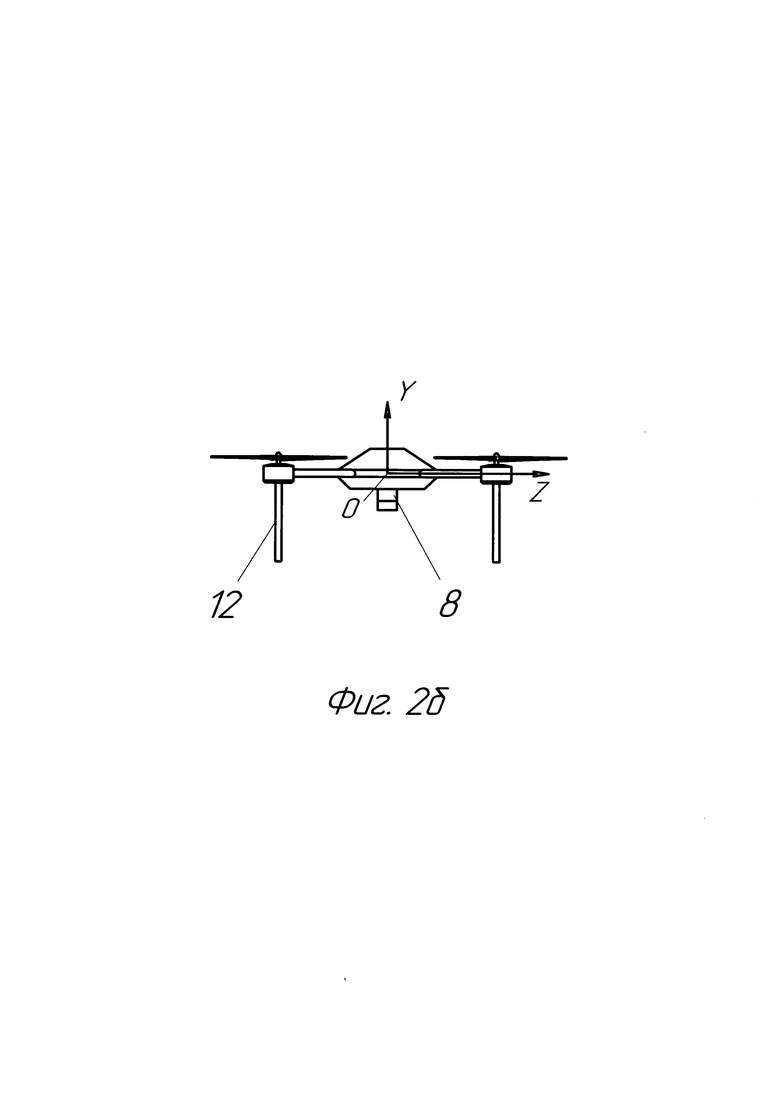
На фиг. 2б изображен вид по стрелке Б фиг 2а.
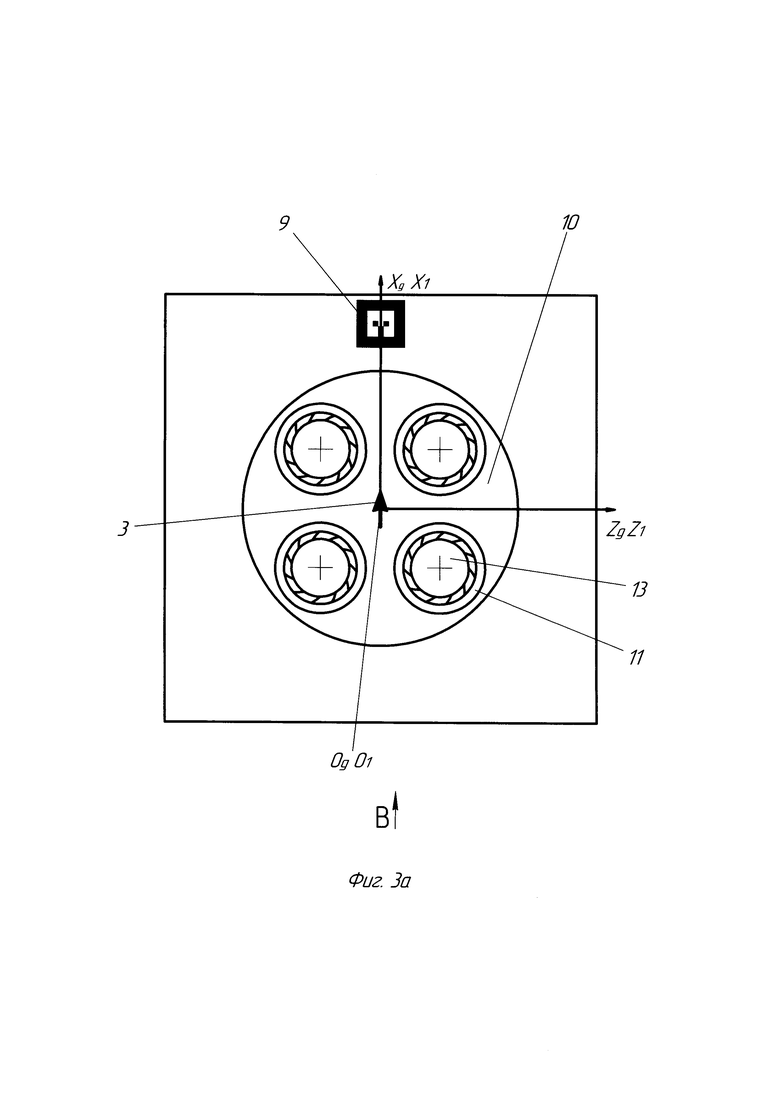
На фиг. 3а изображена посадочная платформа, вид сверху.
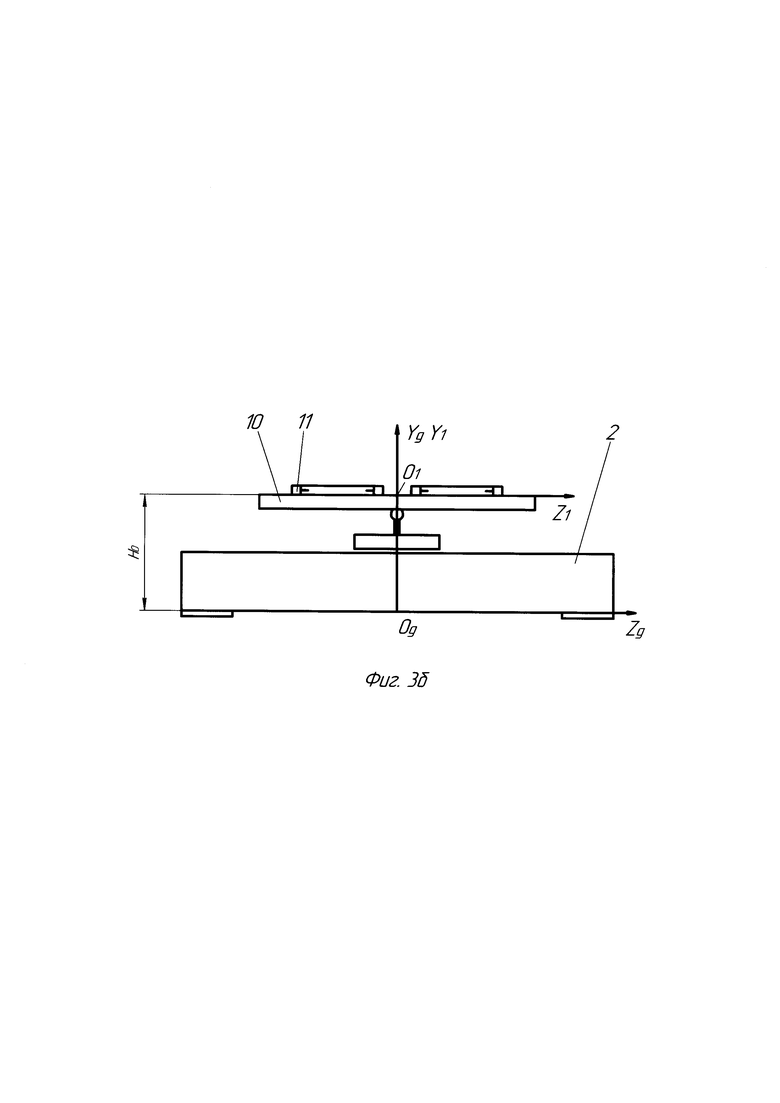
На фиг. 3б изображен вид по стрелке В фиг. 3а.
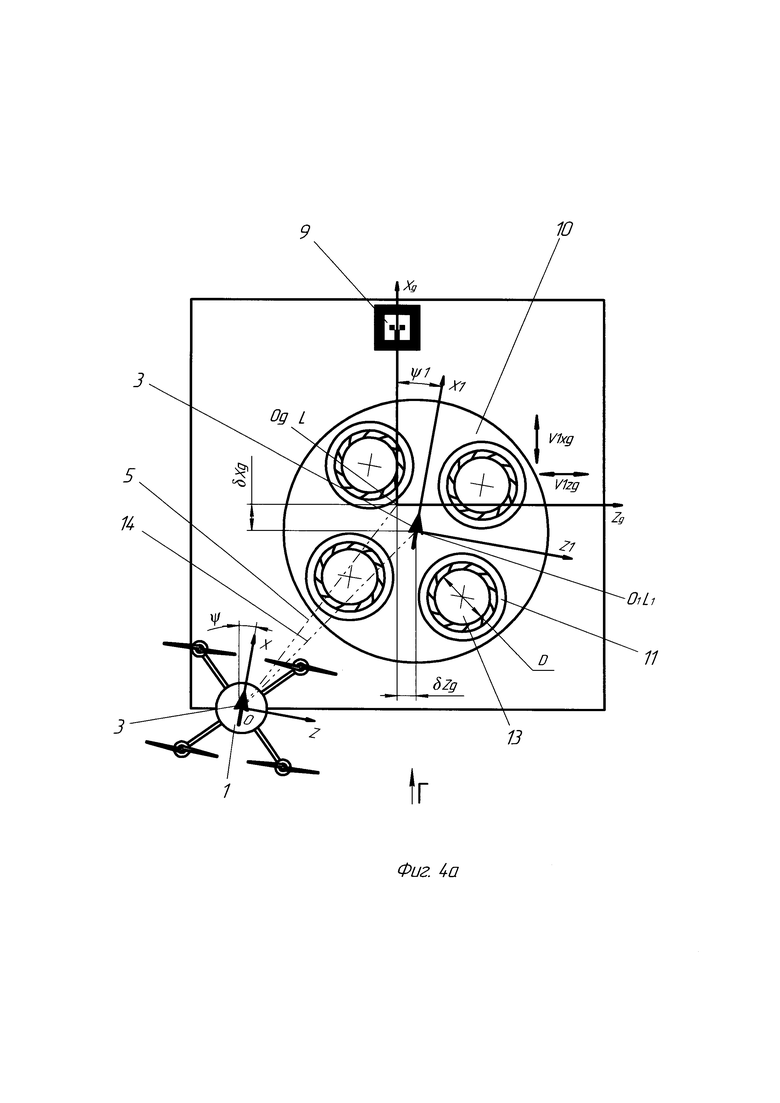
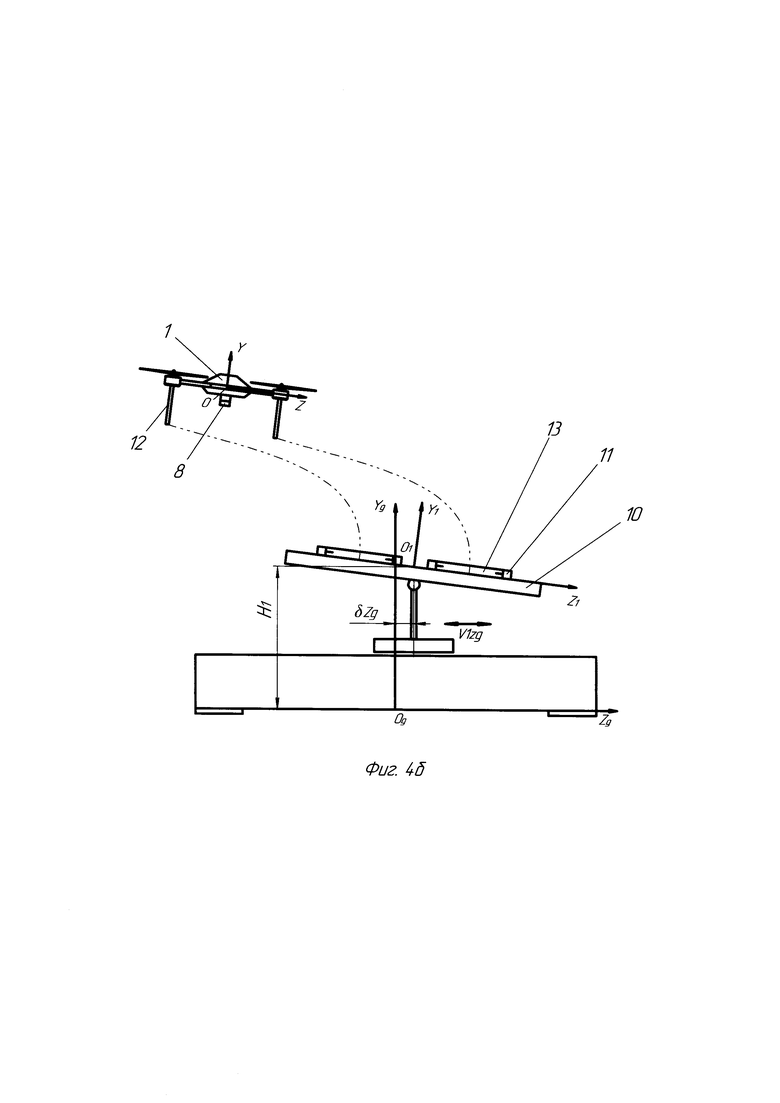
На фиг. 4а схематично изображен вид сверху расположения БПЛА и посадочной платформы в момент определения планируемой точки приземления БПЛА. На фиг. 4, изображен вид по стрелке Г фиг. 4а.
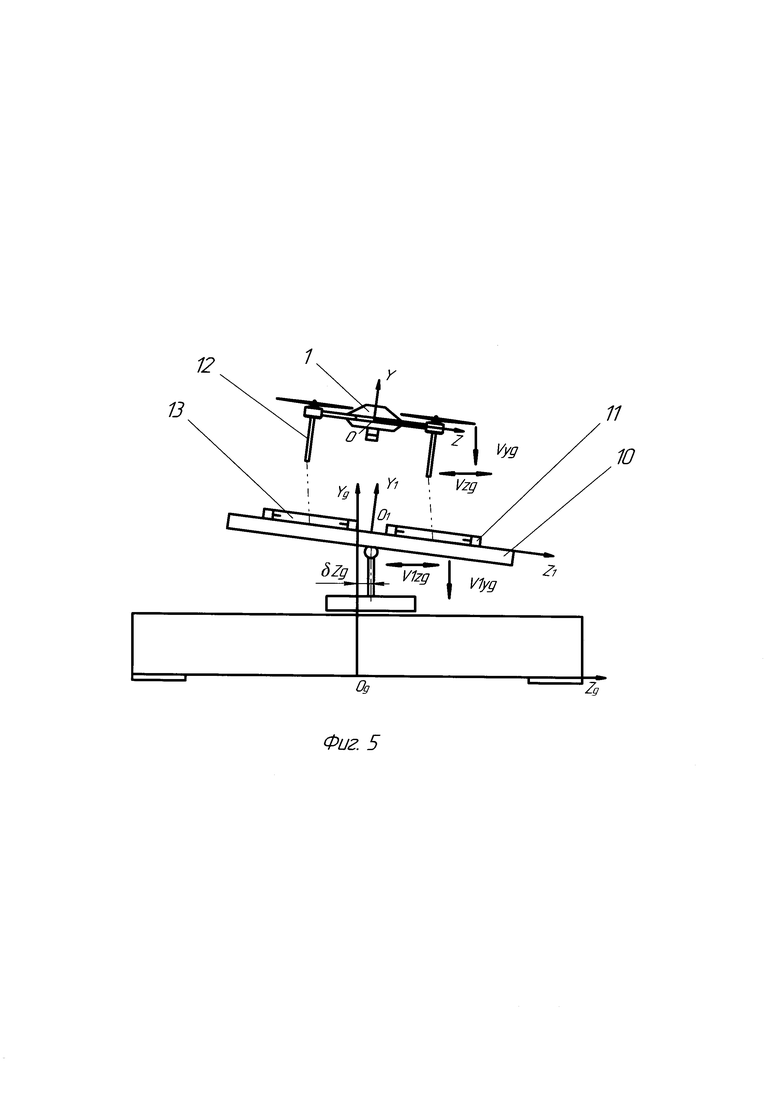
На фиг. 5 схематично изображен вариант расположения БПЛА и посадочной платформы на завершающем этапе процесса приземления БПЛА на посадочную площадку.
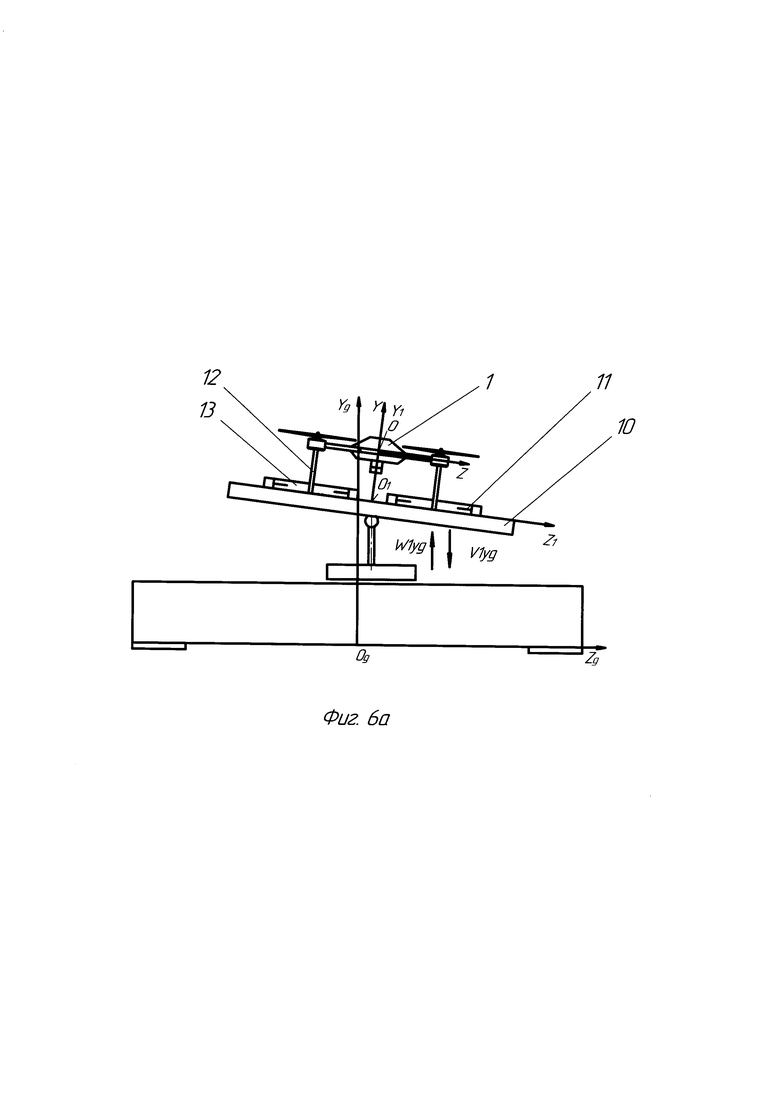
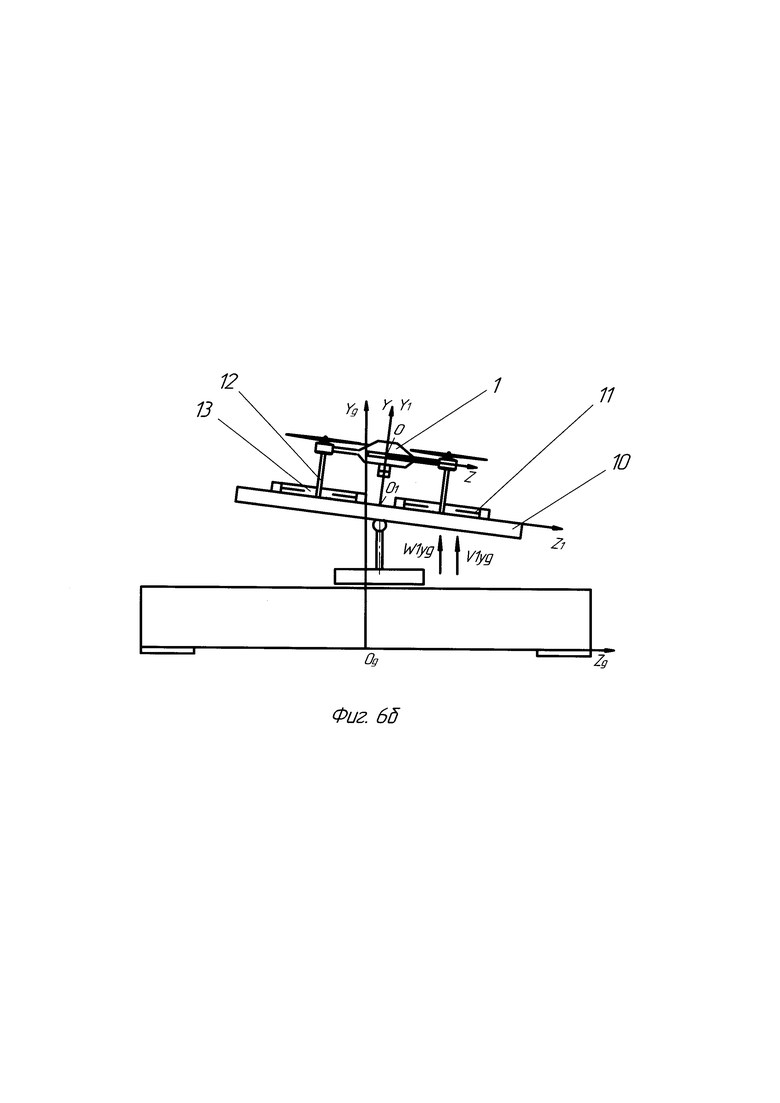
На фиг. 6а и 6б представлена схема расположения БПЛА и посадочной платформы после приземления БПЛА на посадочную площадку до момента захвата БПЛА захватным устройством.
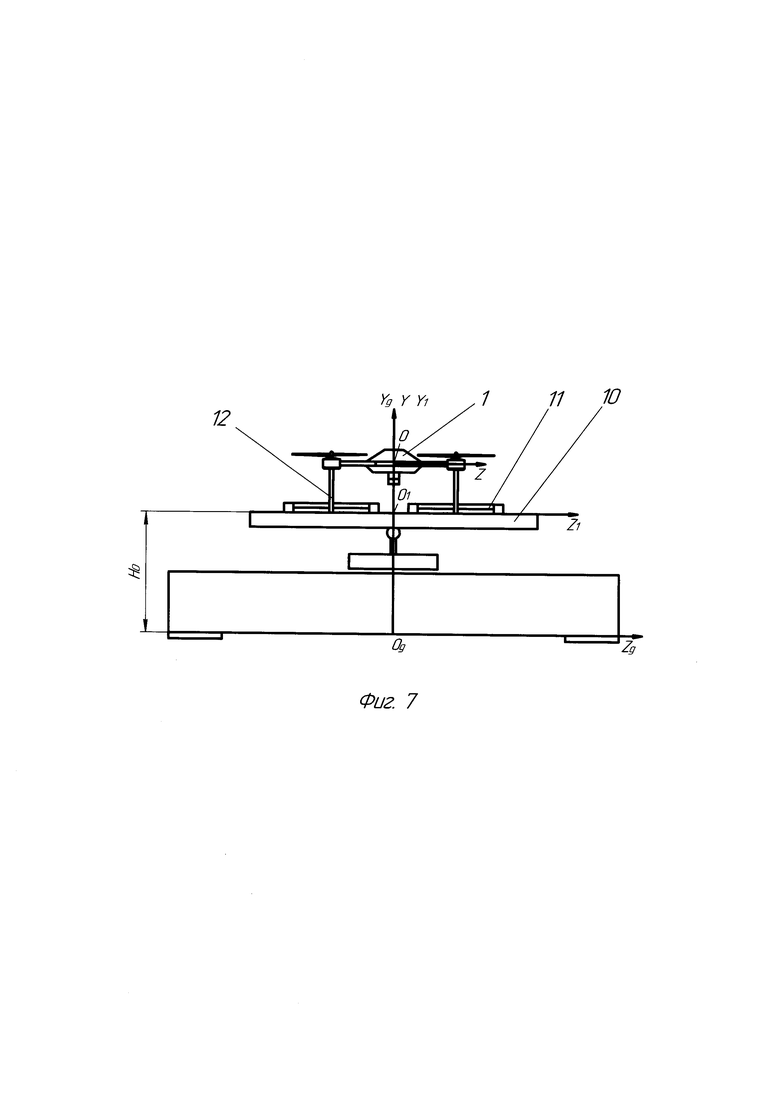
На фиг. 7 представлена схема расположения БПЛА и элементов конструкции посадочной платформы после позиционирования БПЛА.
Для понимания сущности технического решения использованы терминология и обозначения в соответствии с ГОСТ 20058-80. Принята нормальная земная система координат OgXgYgZg, ось OgYg которой направлена вверх по местной вертикали, а направление осей OgXg и OgZg определяют плоскость земли. Под местной вертикалью понимают прямую, совпадающую с направлением силы тяжести.
На фиг. 1а схематично изображен вид сверху расположения БПЛА 1 и посадочной платформы 2 в момент подлета БПЛА 1 к посадочной платформе 2. На фиг. 1б изображен вид по стрелке А фиг. 1а. Для ориентации сторон БПЛА 1 в пространстве на нем изображена маркировка 3 в виде стрелки, которая направлена от хвоста к носу БПЛА 1. Поз. 4 изображено направление полета БПЛА 1, штрихпунктирная линия показывает планируемую траекторию 5 полета БПЛА 1 на ближайшее расстояние. Планируемая траектория 5 полета может быть как прямолинейной, так и криволинейной. На фиг. 1а планируемая траектория 5 полета прямолинейная. Поз 6 обозначена граница поля 7 обзора средств 8 обзора (см. фиг. 1б) (видеокамера, направленная антенна и т.п.) БПЛА 1 при приземлении. Величина поля 7 обзора средств 8 обзора БПЛА 1 при приземлении зависит от установленных на БПЛА 1 средств 8 обзора (видеокамера, направленная антенна и т.п.) и от высоты полета БПЛА 1. На фиг. 1б средство 8 обзора представлено в виде видеокамеры.
Посадочная платформа 2 установлена в начальной точке Og нормальной земной системы координат OgXgYgZg. На посадочной платформе 2 установлен маркер 9 или иное устройство, по которому БПЛА 1 определяет место приземления и выполняет ориентацию БПЛА 1 относительно сторон посадочной платформы 2. На посадочной платформе 2 установлена посадочная площадка 10, которая содержит захватные устройства 11, которые выполнены, например, в виде ирисовых диафрагм или любых других устройств известных из уровня техники. На поверхности посадочной площадки 10 нанесена аналогичная что и на БПЛА 1 маркировка 3 в виде стрелки, которая показывает направление сторон БПЛА 1 после приземления и позиционирования на посадочной площадке 10. Маркировка 3 нанесена на графические изображение БПЛА 1 и посадочной площадки 10 только для ориентации и простоты понимания описания технического решения и могут отсутствовать на реальном БПЛА 1 и посадочной площадке 10.
Планируемая точка приземления БПЛА 1 на посадочную площадку 10 обозначена буквой L, и она находится в точке Og начала нормальной земной системы координат OXgZg (см. фиг. 1а). Однако, местоположение планируемой точки L приземления может быть выбрано иным и отличаться от точки Og начала нормальной земной системы координат OXgZg.
На фиг. 1а линия планируемой траектории 5 БПЛА 1 проходит мимо планируемой точки L приземления БПЛА1 на посадочной площадке 10. Это означает, что БПЛА 1 летит не точно. Величина ошибки составляет 8.
На фиг. 2а изображен БПЛА 1 вид сверху, на фиг. 2б - вид по стрелке Б фиг 2а.
БПЛА 1 содержит шасси 12 и средство 8 обзора (видеокамера, направленная антенна и т.п.), которая представлена в виде видеокамеры. БПЛА 1 содержит также не изображенные на фиг. 2а и 2б датчики ориентации БПЛА 1 в пространстве, скорости полета, состояния элементов питания, обзорные видеокамеры или лидары и другие устройства, бортовой компьютер и т.п., который обеспечивают прокладку маршрута полета, полет в условиях окружающей обстановки, ориентацию в пространстве и т.п.
Для БПЛА 1 принята связанная система координат OXZ, осями которой являются продольная ось ОХ, нормальная ось OY и поперечная ось OZ фиксированные относительно беспилотного летательного аппарата.
Продольная ось ОХ связанной системы координат, расположенная в плоскости симметрии БПЛА 1 и направлена от хвостовой к носовой части БПЛА 1.
Нормальная ось OY связанной системы координат, расположенная в плоскости симметрии БПЛА 1 и направлена к верхней части БПЛА 1.
Поперечная ось OZ связанной системы координат, перпендикулярная плоскости OXY и направленная к правой части БПЛА 1.
Начало осей координат О расположено в центре корпуса БПЛА 1.
Направление маркировки 3 в виде стрелки совпадает с направлением оси ОХ.
В полете и при приземлении БПЛА 1 может иметь различную угловую ориентацию и различные скорости вращения относительно нормальной земной системы координат OgXgYgZg (на фиг. 2а, 2б не показано).
На фиг. 3а изображена посадочная платформа 2, вид сверху, на фиг. 3б изображен вид по стрелке В фиг. 3а.
Посадочная платформа 2 содержит посадочную площадку 10, на которой расположены захватные устройства 11. Посадочная площадка 10 может перемещаться по посадочной платформе 2 в горизонтальной плоскости OgXgZg и вертикально вдоль оси OgYg, а также изменять свою ориентацию в пространстве.
В предоставленном на фиг. 3а и 3б варианте захватные устройства 11 выполнены, в виде ирисовых диафрагм, установленных по местам приземления стоек шасси 12 БПЛА 1. Захватные устройства 11 имеют отверстия 13 для приема стоек шасси 12 БПЛА 1.
Посадочная платформа 2 также содержит маркер 9 или иное устройство, по которому БПЛА 1 производит ориентацию при приземлении на посадочную площадку 10.
Для посадочной площадки принята связанная система координат, осями которой являются продольная ось O1X1, нормальная ось O1Y1 и поперечная ось O1Z1. Начало осей координат 01 расположено в центре посадочной площадки 10.
Продольная ось O1X1 и поперечная ось O1Z1 расположены в плоскости посадочной площадки 10 с началом в центре посадочной площадки 10.
Нормальная ось O1Y1 направлена от центра посадочной площадки 10 вверх.
Маркировка 3 в виде стрелки направлена вдоль оси координат O1X1.
Посадочная площадка 10 может иметь различную угловую ориентацию и различные скорости вращения относительно нормальной земной системы координат OgXgYgZg (на фиг. 3а, 3б не показано).
В исходном состоянии посадочная площадка 10 установлена горизонтально, на минимальной высоте Н0, при этом нормальная ось O1Y1 совпадает с вертикальной осью OYg, продольная ось OX1 параллельна оси OgXg, поперечная ось O1Z1 БПЛА 1 параллельна оси OgZg нормальной земной системы координат.
Помимо указанных устройств посадочная платформа 2 содержит также датчики, контроллерную систему управления, устройства зарядки или замены аккумуляторов, устройства обслуживания БПЛА 1 в промежутках между полетами и т.п.которые не изображены на фиг. 3а и 3б:
На фиг. 4а схематично изображен вид сверху расположения БПЛА 1 и посадочной платформы 2 в момент определения планируемой точки приземления и приземления БПЛА 1.
Посадочная платформа 2 находится в поле 7 обзора установленных на БПЛА 1 средств обзора 8 (видеокамера, направленная антенна и т.п.). После определения планируемой точки приземления БПЛА 1 ориентируется по маркеру 9 и стремится приземлиться на посадочную площадку 10 на планируемую точку L приземления, которая находится в точке Og начала нормальной земной системы координат OgXgZg.
Поз. 5 обозначена планируемая траектория полета приземляющегося БПЛА 1, которая заканчивается в точке в планируемой точке L приземления, которая совпадает с точкой Og начала нормальной земной системы координат OgXgZg, поз 14 обозначена ожидаемая (расчетная) траектория полета приземляющегося БПЛА 1, которая заканчивается в ожидаемой точке L1 приземления БПЛА 1 с координатами δXg, δZg. Местоположение точки О1 начала связанной системы координат O1X1Z1 посадочной площадки 10 совпадает с местоположением точки L1 ожидаемого приземления БПЛА 1 на посадочную площадку 10. При смене ожидаемой точки L1 приземления БПЛА 1 на посадочную площадку 10 посадочная площадка меняет местоположение так, чтобы точки L1 и О1 совпали.
Векторы скорости перемещения посадочной площадки 10 показаны в виде стрелок V1xg, V1zg.
Высота H1 показывает максимальную высоту расположения посадочной площадки 10.
Ψ - угол рыскания БПЛА 1, Ψ1 - угол рыскания посадочной площадки 10. Угол крена θ БПЛА 1, угол крена θ1 посадочной площадки 10, угол тангажа γ БПЛА 1 и угол тангажа γ1 посадочной площадки 10 не могут быть отображены на фиг. 4а и 4б.
Отверстие 13 захватного устройства 11 раскрыто на величину D, что соответствует диаметру ожидаемого кругового отклонения стоек шасси 12 БПЛА1 от ожидаемой точки L1 приземления.
На фиг. 5 схематично изображен вариант расположения БПЛА 1 и посадочной платформы 2 на завершающем этапе процесса приземления БПЛА 1 на посадочную площадку 10.
Посадочная платформа 2 находится в поле 7 обзора установленных на БПЛА 1 средств обзора 8 (видеокамера, направленная антенна и т.п.). БПЛА 1 ориентируется по маркеру 9 и стремится приземлиться на посадочную площадку 10 на планируемую точку L (не показана) приземления, которая находится в точке Og начала нормальной земной системы координат OgXgZg.
Посадочная платформа опускает посадочную площадку с вертикальной скоростью V1yg.
Скорость сближения БПЛА 1 с посадочной площадкой 10.
V=Vyg-V1yg,
где Vyg - скорость вертикального движения БПЛА 1;
V1yg - скорость вертикального движения посадочной площадки 10;
V - скорость сближения БПЛА 1 с посадочной площадкой 10. Кроме того, показаны векторы скоростей движения БПЛА 1 Vzg, Vyg и векторы скоростей движения посадочной площадки 10 V1zg и V1yg.
На фиг. 6а и 6б представлена схема расположение БПЛА 1 и посадочной платформы 2 с момента приземления БПЛА 1 на посадочную площадку 10 до момента захвата БПЛА 1 захватными устройствами 11. V1yg - скорость вертикального движения посадочной площадки 10, W1yg - ускорение движения посадочной площадки 10. На фиг. 6а отверстия 13 захватных устройств 11 открыты, на фиг. 6б захватные устройства 11 в процессе закрытия и отверстие 13 частично закрыты.
На фиг. 7 представлена схема расположения БПЛА 1 и элементов конструкции посадочной платформы 2 после приземления БПЛА 1 на посадочную площадку 10, захвата стоек шасси 12 БПЛА 1 захватными устройствами 11 и позиционирование БПЛА 1.
Осуществление способа.
Способ приземления БПЛА 1 вертикального взлета и посадки на посадочную платформу 2 заключается в следующем.
БПЛА 1 находит посадочную платформу 2 (фиг. 1а, 1б) по заданным до полета координатам места расположения посадочной платформы 2 или координатам, которые направляет посадочная платформа 2, или пеленгуя сигнал, идущий от посадочной платформы 2. БПЛА 1 прилетает на заданную координату с определенной погрешностью. Важно, чтобы при этом посадочная платформа 2 или элементы, по которым БПЛА 1 идентифицирует место приземления оказались в поле 7 обзора установленных на БПЛА 1 средств обзора 8. В противном случае БПЛА 1 придется вести дополнительный поиск посадочной платформы 2 тем или иным способом.
Посадочная платформа 2 может вести себя пассивно или направлять свои координаты или сигнал для пеленгации. Посадочная площадка 10 установлена на посадочной платформе 2 горизонтально в исходном состоянии на минимальной высоте Но, захватные устройства 11 установлены по местам расположения стоек шасси 12 при приземлении БПЛА 1 и находятся в состоянии максимального раскрытия.
Ось O1Y1 посадочной площадки 10 совпадает с вертикальной осью OgYg, продольная ось OX1 (не показана) посадочной площадки 10 параллельна оси OgXg (не показана), поперечная ось 01Z1 посадочной площадки 10 параллельна оси OgZg нормальной земной системы координат.
Посадочная платформа 2 могут быть установлены сигнальные средства, излучающие, например, в видимом, ИК, радио диапазоне, для повышения вероятности ее обнаружения и более точного определения сенсорами БПЛА 1.
После нахождения посадочной платформы 2 БПЛА 1 начинает обмен данными с посадочной платформой 2, определяет планируемую траекторию полета 5 и планируемую точку L приземления БПЛА 1 на посадочной площадке 10 (фиг. 4а) и приступает к приземлению. При приземлении БПЛА 1 ориентируется по маркеру 9.
Посадочная платформа 2 в процессе приземления БПЛА 1 отслеживает местоположение БПЛА 1, получая и обрабатывая в реальном времени данные о параметрах полета БПЛА 1:
- местоположении и высоте полета приземляющегося БПЛА 1 относительно расположения посадочной платформы 2, т.е. начала нормальной земной системы координат OgXgYgZg;
- вертикальной Vyg и горизонтальной Vxg, Vzg скоростях движения БПЛА 1 в нормальной земной системы координат OgXgZgYg и соответственно ускорении Wxg, Wzg, Wyg;
- углах ориентации БПЛА 1 в пространстве (углы рыскания ψ, тангажа θ и крена γ) и угловых скоростях вращения БПЛА 1;
- метеорологических условиях: температура, освещенность наличие осадков, видимости, скорость ветра;
- данные о собственном движении посадочной платформы 2 и т.п.
Данные о полетных параметрах могут быть получены с бортового контроллера БПЛА 1 и/или установленных на посадочной платформе 2 датчиков слежения за приземляющимся БПЛА 1. Метеорологические условия могут быть получены от установленной на посадочную платформу 2 или ближайшей метеостанции. Если посадочная платформа 2 установлена на подвижном объекте метеостанция может быть также установлена на подвижном объекте.
На основании полученных данных посадочная платформа 2 в реальном времени определяет ожидаемую траекторию движения 14 и координату ожидаемой точки L1 приземления БПЛА 1 на посадочную площадку 10 (фиг. 4а) в нормальной земной системе координат OgXgZg, отклонение от ожидаемой точки приземления, вертикальную и горизонтальную скорости движения БПЛА 1, ориентацию БПЛА в пространстве на момент приземления и его угловые скорости вращения на момент приземления.
Координаты ожидаемой точки L1 приземления БПЛА 1, ожидаемое отклонение, вертикальная и горизонтальная скорости движения БПЛА 1, углы ориентации БПЛА 1 в пространстве и его угловые скорости вращения на момент приземления рассчитываются исходя из динамики БПЛА 1, методом экстраполяции линии движения БПЛА 1 на уровень поверхности посадочной площадки 10 или другими методами.
Затем посадочная платформа 2 перемещает посадочную площадку 10 на координаты ожидаемой точки L1 приземления БПЛА 1 на посадочную площадку 10. Одновременно посадочная платформа 2 изменяет пространственную ориентацию посадочной площадки 10 таким образом, чтобы углы ориентации посадочной площадки 10 в пространстве (углы рыскания ψ1, тангажа θ1 и крена γ1 (не показаны)) соответствовали ожидаемым углам ориентации БПЛА1 в пространстве на момент приземления (углы рыскания ψ, тангажа θ и крена γ (не показаны)). Это обеспечивает параллельность приземляющегося БПЛА 1 и посадочной площадки 10, что дает возможность одновременного приземления всех стоек шасси 12 на поверхность посадочной площадки 10.
По мере изменения координат ожидаемой точки L1 приземления БПЛА 1 на посадочную площадку 10 в нормальной земной системе координат посадочная площадка 10 перемещается на новые ожидаемые координаты ожидаемой точки L1 приземления, изменяет пространственную ориентацию в соответствии с ожидаемой пространственной ориентацией приземляющегося БПЛА 1. Дополнительно посадочная платформа 2 определяет величину возможного отклонения БПЛА 1 от ожидаемой точки L1 приземления и изменяет в реальном времени диаметр D отверстия 13 захватного устройства 11 на величину возможного отклонения БПЛА 1 от ожидаемой точки L1 приземления. Все указанные действия происходят в реальном времени в процессе приземления БПЛА 1, и поэтому посадочная площадка 10 совершает непрерывное движение, перемещаясь в каждый момент на новую ожидаемую точку L1 приземления и принимая новую ориентацию в пространстве. Это позволяет принять приземляющийся БПЛА 1 на посадочную площадку 10 с минимальной ошибкой.
Учитывая, что посадочная площадка 10 в момент приземления расположена параллельно приземляющемуся БПЛА 1, приземление будет происходить на все стойки шасси 12 БПЛА 1 одновременно или с очень коротким промежутком времени между касаниями стоек шасси 12. Это снижает время между касанием первой и последней стойкой шасси 12 БПЛА 1 посадочной площадки 10 (время приземления БПЛА 1). В свою очередь приземление БПЛА 1 на все стойки шасси 12 одновременно снижает нагрузки на отдельные стойки шасси 12, снижая тем самым вероятность их разрушения или деформации.
БПЛА 1 продолжает приземление, ориентируясь по маркеру 9, и стремится приземлиться на планируемую точку L приземления на посадочную площадку 10, которая находится в точке Og начала нормальной земной системы координат OgXgZg.
Непосредственно перед приземлением, т.е. касанием шасси 12 БПЛА 1 посадочной площадки 10 посадочная платформа 2 (фиг. 5) начинает опускать посадочную площадку 10 вниз со скоростью V1yg, что снижает скорость сближения V БПЛА 1 с поверхностью посадочной площадки 10.
V=Vyg-V1yg,
где V - скорость сближения БПЛА 1 с поверхностью посадочной площадки 10.
При высокой скорости сближения V БПЛА 1 с поверхностью посадочной площадки 2 возможен отскок БПЛА 1 от поверхности посадочной площадки 10 или сильный удар, который может повредить шасси 12 БПЛА 1.
Скорость V1yg опускания посадочной площадки 10 выбирают таким образом, чтобы скорость V сближения БПЛА 1 к посадочной площадке 10 составляла не более максимально допустимой величины V max, которая гарантирует приземление БПЛА 1 на посадочную площадку 10 без отскока БПЛА 1 от поверхности посадочной площадки 10, т.е.
V≤V max,
где V max - максимальная допустимая скорость сближения БПЛА 1 с посадочной площадкой 10, при котором не происходит отскока БПЛА 1 от поверхности посадочной площадки 10 и повреждения стоек шасси 12. Данная величина может быть определена для конкретного БПЛА 1 при приземлении на конкретную посадочную площадку 10 опытным путем.
Лучший результат дает такой способ приземления, при котором по мере приближения к БПЛА 1 к поверхности посадочной площадки 10 разность вертикальных скоростей БПЛА 1 Vyg и посадочной площадки 10 Vyg1, т.е. скорость сближения V БПЛА 1 с поверхностью посадочной площадки 10 стремится к нулю. В этом случае реализуется безударное приземление БПЛА 1.
Снижение скорости сближения БПЛА 1 с поверхностью посадочной площадки 10 непосредственно перед приземлением позволяет снизить нагрузку на стойки шасси 12 БПЛА 1 и исключить отскок БПЛА 1 после касания стоек шасси 12 поверхности посадочной площадки 10. Это повышает надежность процесса приземления в случаях, когда БПЛА 1 по каким-либо причинам имеет высокую вертикальную скорость приземления.
После приземления БПЛА 1 находится на посадочной площадке 10 на месте приземления и не предпринимает никаких действий. Посадочная платформа 2 производит захват БПЛА 1 захватными устройствами 11 (фиг. 6а, 6б). Посадочная площадка 10 на момент приземления БПЛА 1 имеет определенную вертикальную скорость опускания Vyg1. С момента приземления БПЛА до завершения захвата БПЛА 1 захватными устройствами 11 посадочная площадка 10 начинает торможение с заданной величиной направленного вверх ускорения Wyg1. После полного торможения посадочная площадка 10 сохраняет заданное ускорение и начинает движение вверх. Это позволяет прижать БПЛА 1 к поверхности посадочной площадки 10, что способствует удержанию его на месте. В случае, если захват БПЛА 1 происходит быстро, и посадочная площадка 10 не успевает опуститься до минимальной высоты Но, определяемой конструкцией посадочной платформы 2, движение вверх может отсутствовать. Одновременно с началом торможения посадочная площадка 10 может приводится в горизонтальное положение.
При наличии ветра после приземления БПЛА 1 посадочная платформа 2 может удерживать наклон посадочной площадки 10 в сторону ветра.
После приземления на движущуюся посадочную платформу 2 посадочная площадка 10 может удерживать наклон в сторону ветра с учетом собственного направления и скорости движения.
Наклон посадочной площадки 10 в сторону направления ветра способствует удерживанию БПЛА 1 на точке приземления на посадочной площадке 10, снижая возможность смещения БПЛА 1 от ветра.
Учитывая, что приземление БПЛА 1 по данному способу производится с высокой точностью на заданную точку посадочной площадки 10, а отверстия 13 захватных устройств 11 открыты на минимально требуемую величину и способны захватить приземлившийся БПЛА 1, совершив при этом минимальное перемещение, захват БПЛА 1 занимает короткое время.
Захватные устройства 11 закрывают отверстие 13 до полного замыкания стоек шасси 12 БПЛА 1 и надежно удерживают его. При этом в момент захвата БПЛА 1 смещается к центру посадочной площадки 10 так, что нормальная ось OY БПЛА 1 совпадает с вертикальной осью посадочной площадки 10 O1Y1 и разворачивается таким образом, что, продольная ось ОХ БПЛА 1 становится параллельна оси O1X1 посадочной площадки 10. Захват БПЛА 1 осуществлен. Учитывая, что данный способ приземления реализует высокую точность приземления, перемещение и разворот БПЛА 1 при захвате могут быть незначительными.
На завершающем этапе посадочная площадка 10 перемещается в исходное положение. Это приводит к позиционированию БПЛА 1 на посадочной платформе 2 (фиг. 7).
В состоянии позиционирования БПЛА 1 на посадочной платформе 2, нормальная ось OY БПЛА 1 совпадает с вертикальной осью OgYg, продольная ось ОХ БПЛА 1 параллельна оси OgXg, поперечная ось OZ БПЛА 1 параллельна оси OgZg нормальной земной системы координат. Посадочная площадка 10 находится на высоте Н0.
БПЛА 1 доступен для обслуживания в автоматическом режиме.
Таким образом, описанный способ приземления БПЛА на посадочную платформу позволяет:
- повысить точность и надежность приземления БПЛА на посадочную платформу;
- повысить безопасность приземления для БПЛА путем обеспечения безударного приземления на все стойки шасси БПЛА и исключения отскоков БПЛА после приземления;
- повысить быстродействие посадочной платформы после приземления БПЛА на посадочную площадку путем немедленного закрепления БПЛА после приземления с последующим позиционированием;
- позволяет осуществлять приземление БПЛА при сильном ветре, при движении посадочной платформы и других неблагоприятных условиях приземления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ автономного приземления беспилотного летательного аппарата на мобильную платформу | 2023 |
|
RU2821253C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
Изобретение относится к способу приземления БПЛА на посадочную платформу. Для приземления БПЛА на посадочную платформу БПЛА находит местоположение посадочной платформы, определяет планируемую точку приземления на посадочной площадке, расположенной на посадочной платформе, отслеживает местоположение приземляющегося БПЛА относительно своего расположения и параметры полета, на основании полученных данных определяет в реальном времени ожидаемую точку приземления БПЛА и ориентацию БПЛА в пространстве на момент приземления, перемещает посадочную площадку в ожидаемую точку приземления БПЛА и изменяет пространственную ориентацию посадочной площадки в соответствии с ожидаемой пространственной ориентацией приземляющегося БПЛА. Обеспечивается повышение точности, надежности и безопасности приземления БПЛА на посадочную платформу. 6 з.п. ф-лы, 7 ил.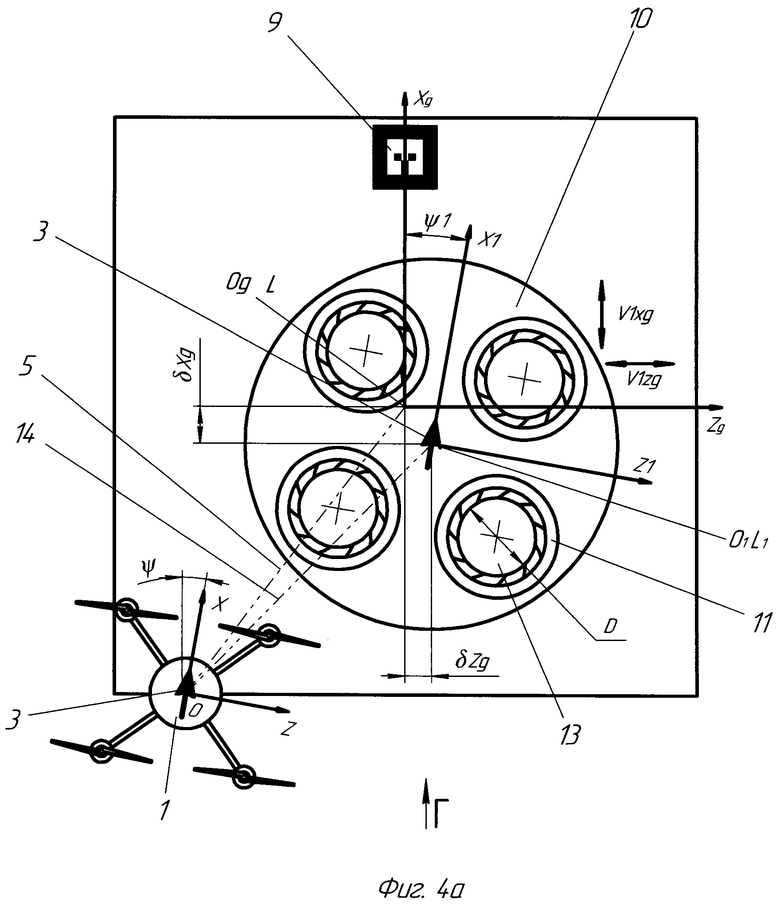
1. Способ приземления БПЛА на посадочную платформу, заключающийся в том, что БПЛА находит местоположение посадочной платформы, определяет планируемую точку приземления на посадочной площадке, расположенной на посадочной платформе, и приземляется на посадочную площадку, отличающийся тем, что в процессе приземления БПЛА посадочная платформа отслеживает местоположение приземляющегося БПЛА относительно своего расположения и параметры полета, на основании полученных данных определяет в реальном времени ожидаемую точку приземления БПЛА и ориентацию БПЛА в пространстве на момент приземления, затем перемещает посадочную площадку в ожидаемую точку приземления БПЛА и изменяет пространственную ориентацию посадочной площадки в соответствии с ожидаемой пространственной ориентацией приземляющегося БПЛА.
2. Способ приземления БПЛА на посадочную платформу по п. 1, отличающийся тем, что непосредственно перед приземлением БПЛА посадочная площадка осуществляет движение вниз, удерживая разность вертикальных скоростей БПЛА и посадочной площадки не более заданной величины.
3. Способ приземления БПЛА на посадочную платформу по п. 1, отличающийся тем, что непосредственно перед приземлением БПЛА посадочная площадка осуществляет движение вниз, при этом разность вертикальных скоростей БПЛА и посадочной площадки стремится к нулю к моменту касания БПЛА посадочной площадки.
4. Способ приземления БПЛА на посадочную платформу по п. 1, отличающийся тем, что с момента приземления БПЛА до завершения захвата БПЛА захватными устройствами посадочная площадка начинает торможение с заданной величиной направленного вверх ускорения, а после полного торможения посадочная площадка сохраняет заданное ускорение и начинает движение вверх.
5. Способ приземления БПЛА на посадочную платформу по п. 1, отличающийся тем, что при наличии ветра посадочная платформа с момента приземления БПЛА до момента захвата удерживает наклон посадочной площадки в сторону ветра.
6. Способ приземления БПЛА на посадочную платформу по п. 1, отличающийся тем, что в процессе приземления БПЛА посадочная платформа дополнительно определяет величину возможного отклонения БПЛА от ожидаемой точки приземления и изменяет в реальном времени диаметр отверстия захватного устройства на величину возможного отклонения БПЛА от ожидаемой точки приземления.
7. Способ приземления БПЛА на посадочную платформу по п. 1, отличающийся тем, что после приземления БПЛА на посадочную площадку сначала происходит захват БПЛА, а затем позиционирование.
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Посадочная платформа для беспилотного летательного аппарата | 2019 |
|
RU2710887C1 |
| US 20170113815 A1, 27.04.2017 | |||
| US 0010633115 B2, 28.04.2020 | |||
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |

