Изобретение относится к устройству посадочных площадок для многовинтовых БПЛА вертикального взлета и посадки и может быть использования для проектирования посадочных площадок пассивного типа, рассчитанных на прием БПЛА различных размеров.
Известны посадочные площадки, обеспечивающие позиционирование БПЛА в процессе приземления за счет взаимодействия направляющих устройств с элементами конструкции БПЛА и трансформации вертикального движения аппарата в горизонтальное. В подавляющем большинстве это платформы гравитационного типа, т.е. трансформируемым движением является падение БПЛА вниз под собственным весом. Такие устройства, как правило не содержат подвижных элементов, способствующих позиционированию приземляющегося БПЛА.
В USD805018, WO 2017/130181Al представлены посадочные площадки, выполнены в виде фигурной воронки с плоским дном. Причем, размер дна определяется размерим расположением опор принимаемого БПЛА. После приземления все опоры встают по кромке дна фигурной воронки.
Воронка, выполненная под все опоры БПЛА, упрощает конструкцию посадочной платформы. Посадочные платформу такого типа позволяют принимать БПЛА с очень низким подвесом груза и могут ориентировать и позиционировать принимаемый ПБЛА с точностью, достаточной для обслуживания.
В US 2017/0217323A1, RU 2710887, KR101858619B1 представлены посадочные платформы для беспилотного летательного аппарата, содержащие множество центрирующих воронок, сконфигурированных для взаимодействия с соответствующими опорами летательного аппарата для достижения заданного посадочного положения. Для этого центрирующие воронки расположены по местам расположения опор и после приземления БПЛА его опоры устанавливаются соосно центрирующим воронкам.
Прототипом изобретения является базовая станция для беспилотных летательных аппаратов RU 2670368 C1, содержащая корпус, в верхней части которого расположена горизонтальная площадка, служащая посадочной поверхностью, на горизонтальной площадке выполнены направляющие, имеющие коническую или пирамидальную форму, при этом горизонтальная площадка выполнена перфорированной.
Существенным недостатком всех вышеуказанных посадочных площадок является то, что они все выполнены под конкретную конфигурацию и размеры принимаемого БПЛА и не обладают универсальностью.
Техническим результатом заявляемого изобретения является разработка посадочной площадки с гравитационным позиционированием принимаемого БПЛА, способной принимать и позиционировать БПЛА различных размеров различным количеством опор и с различным расстоянием между опорами.
Технический результат обеспечивает посадочная площадка для многовинтового БПЛА вертикального взлета и посадки, содержащая корпус, в котором выполнены радиально расположенные V- образные пазы, при этом количество расположенных радиально V-образных пазов больше количества опор принимаемого БПЛА.
Кроме того, расположенные радиально V-образные пазы расположены по окружности неравномерно.
Кроме того, по крайней мере нижние части V- образных пазов покрыты электропроводящим материалом и представляют собой электрический контакт.
Заявленный технический результат также обеспечивает посадочная площадка для многовинтового БПЛА вертикального взлета и посадки, содержащая корпус, на котором радиально установлены направляющие в виде V-образного профиля, при этом количество направляющих в виде V-образного профиля больше количества опор принимаемого БПЛА.
Кроме того, направляющие в виде V-образного профиля расположены по окружности неравномерно.
Кроме того, количество направляющих в виде V-образного профиля равно количеству опор принимаемого БПЛА, а угловое положение направляющих в виде V- образного профиля соответствует угловому расположению опор принимаемых БПЛА.
Кроме того, корпус выполнен из двух частей, которые могут раздвигаться. Кроме того, в центре корпуса выполнено отверстие.
Кроме того, направляющие в виде V-образного профиля выполнены из листового материала.
Кроме того, направляющие в виде V-образного профиля установлены на вертикальные стойки.
Кроме того, направляющие в виде V- образного профиля имеют возможность перемещения в радиальном направлении.
Кроме того, по крайней мере часть установленных радиально направляющих в виде V-образного профиля имеют возможность поворота относительно вертикальной оси расположенной в центре посадочной площадки.
Кроме того, по крайней мере часть установленных радиально направляющих в виде
V-образного профиля имеют возможность вертикального движения.
Кроме того, радиально установленные направляющие в виде V-образного профиля выполнены из электропроводного материала и представляет собой электрический контакт.
Сущность изобретения поясняется следующим графическим материалом.
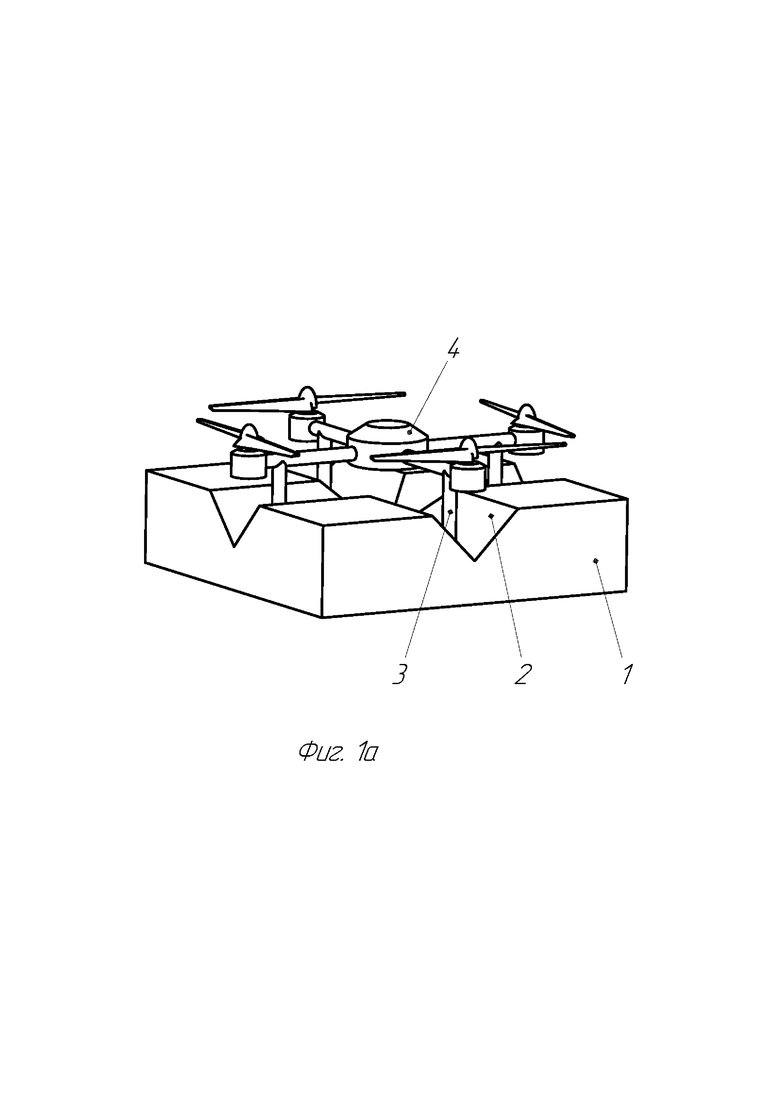
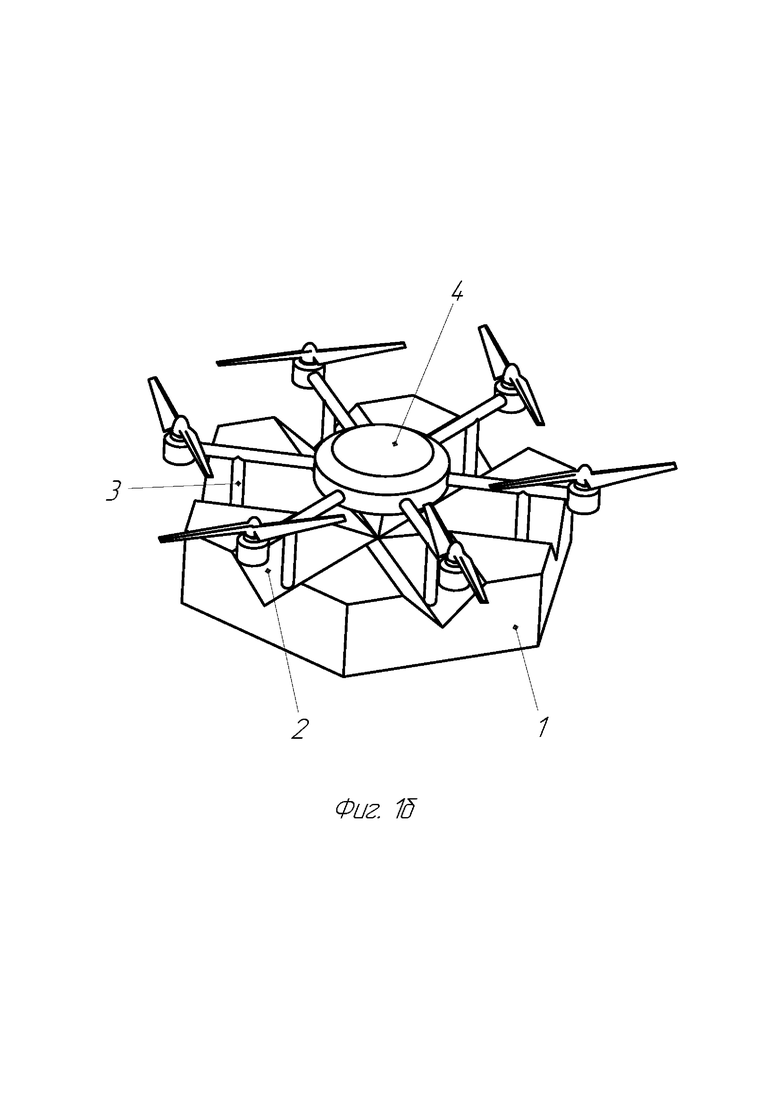
На фиг. 1а и 1б изображены варианты исполнения посадочной площадки с радиально расположенными V-образными пазами, количество которых равно количеству опор принимаемого БПЛА.
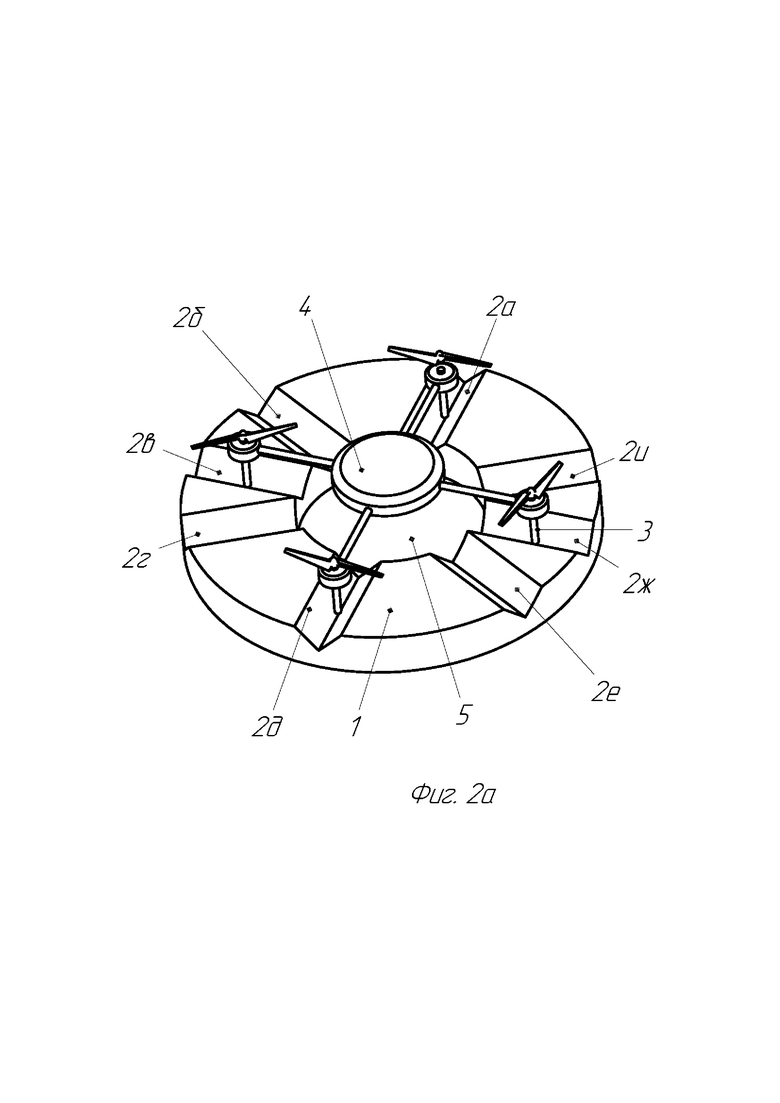
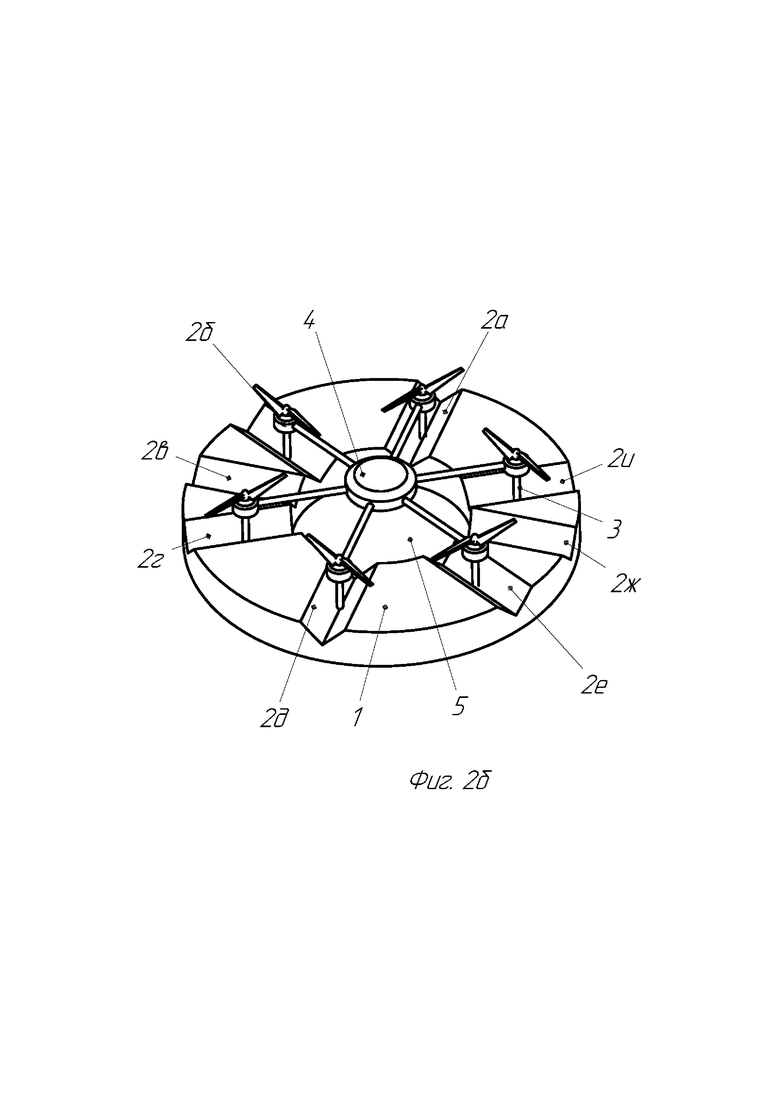
На фиг. 2а и 2б изображен вариант исполнения посадочной площадки с восемью радиально расположенными V-образными пазами и отверстием в центре.
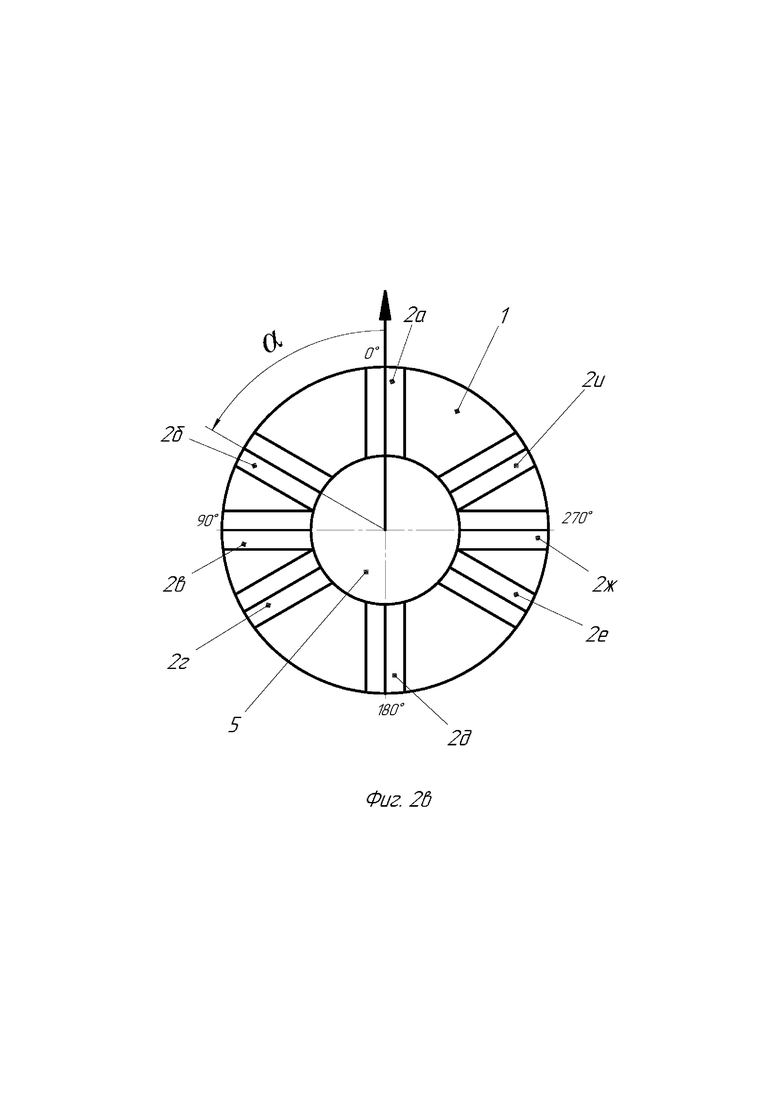
На фиг. 2в изображена посадочная площадка варианта исполнения фиг. 2а, 2б вид сверху без приземлившегося БПЛА.
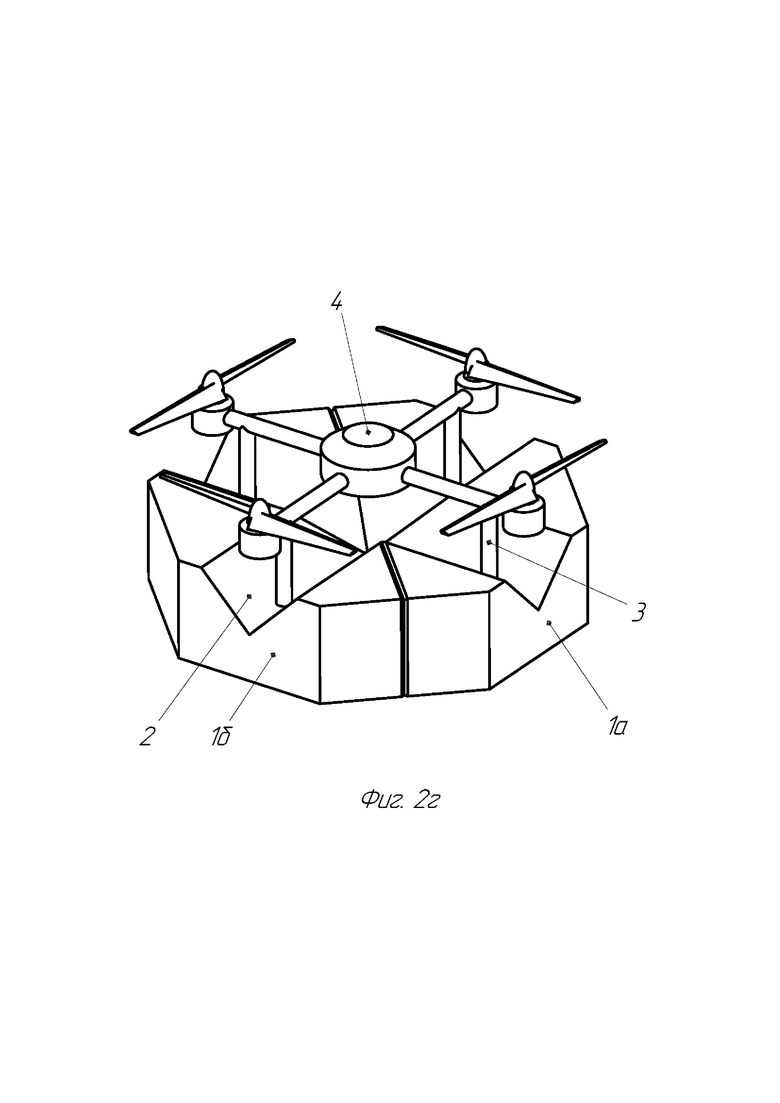
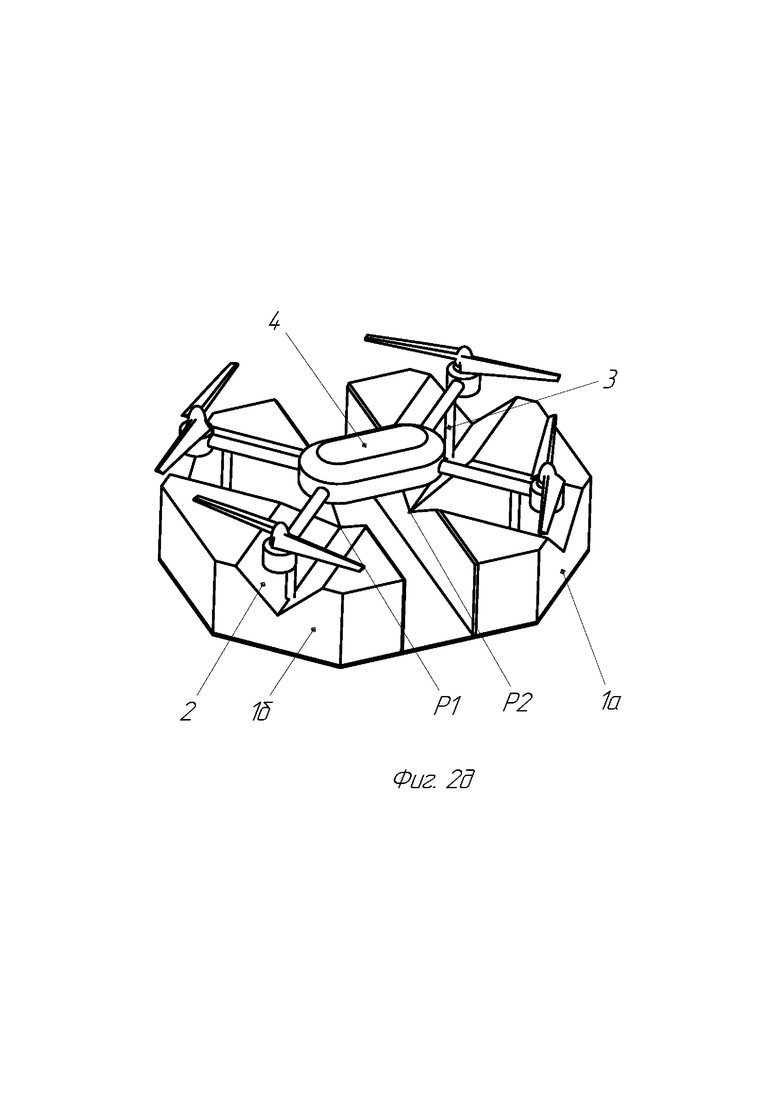
На фиг. 2г, 2д изображен вариант исполнения посадочной площадки, корпус которой состоит из двух частей.
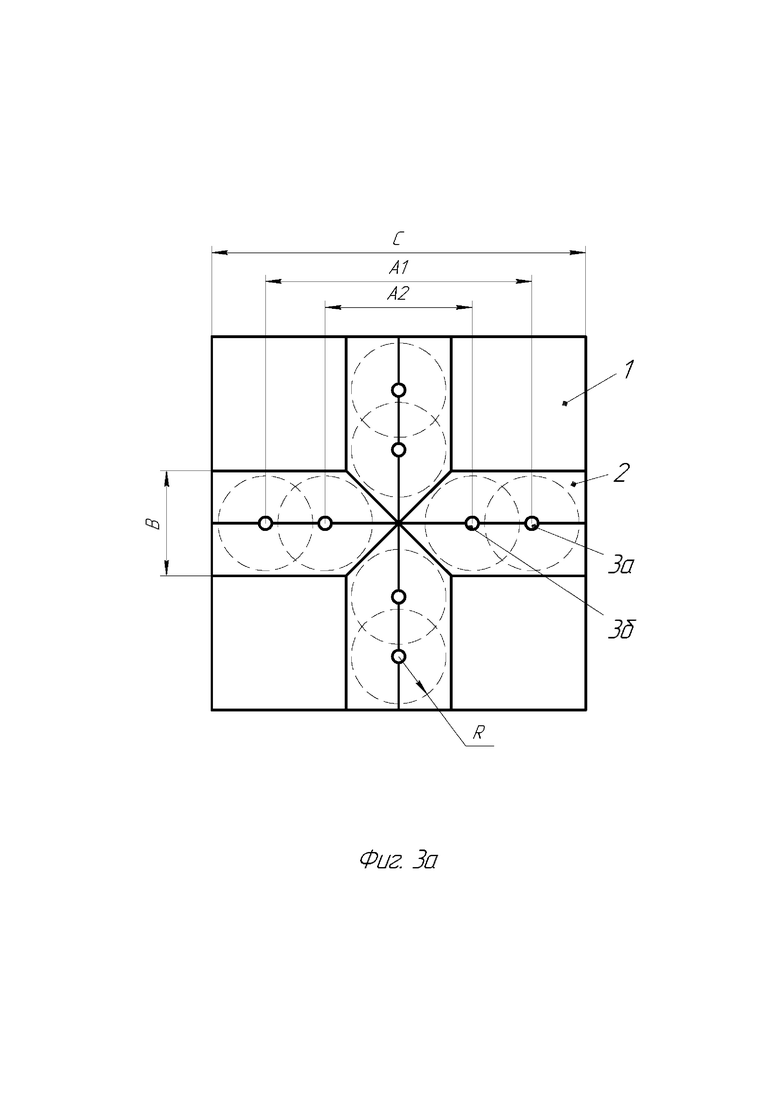
На фиг. 3а изображена схема посадочной площадки с четырьмя V-образными пазами и квадратным корпусом.
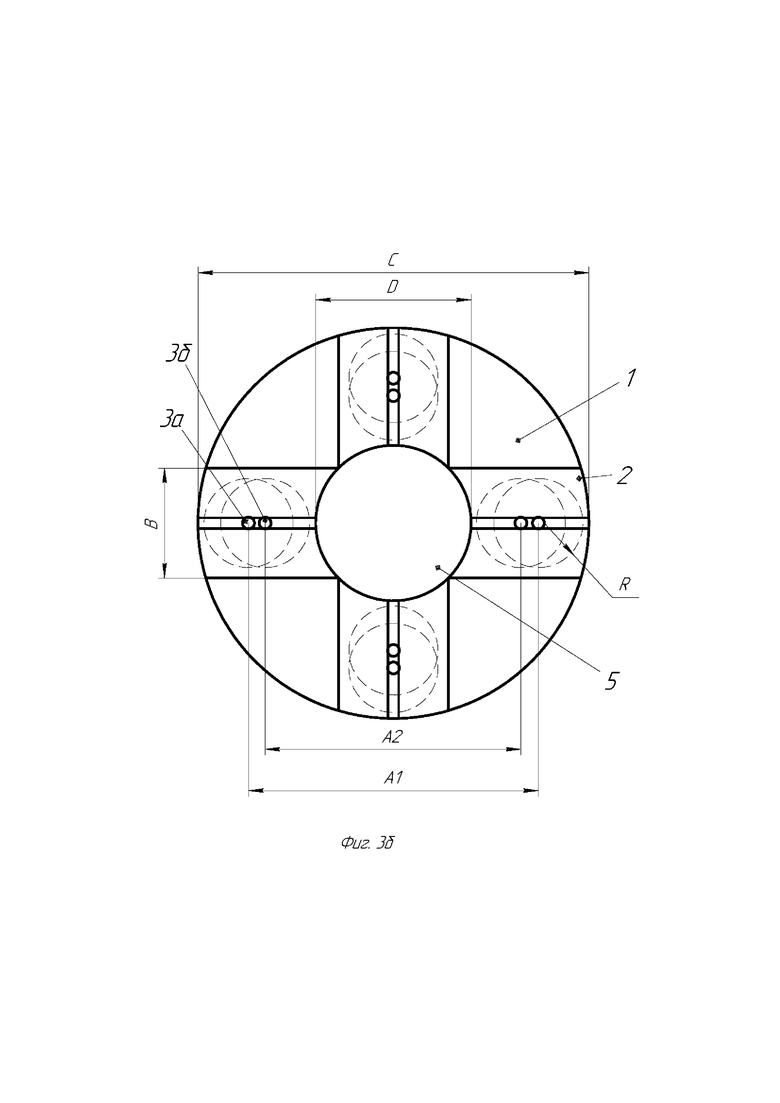
На фиг. 3б изображена схема посадочной площадки с четырьмя V-образными пазами, круглым корпусом и отверстием в центре корпуса.
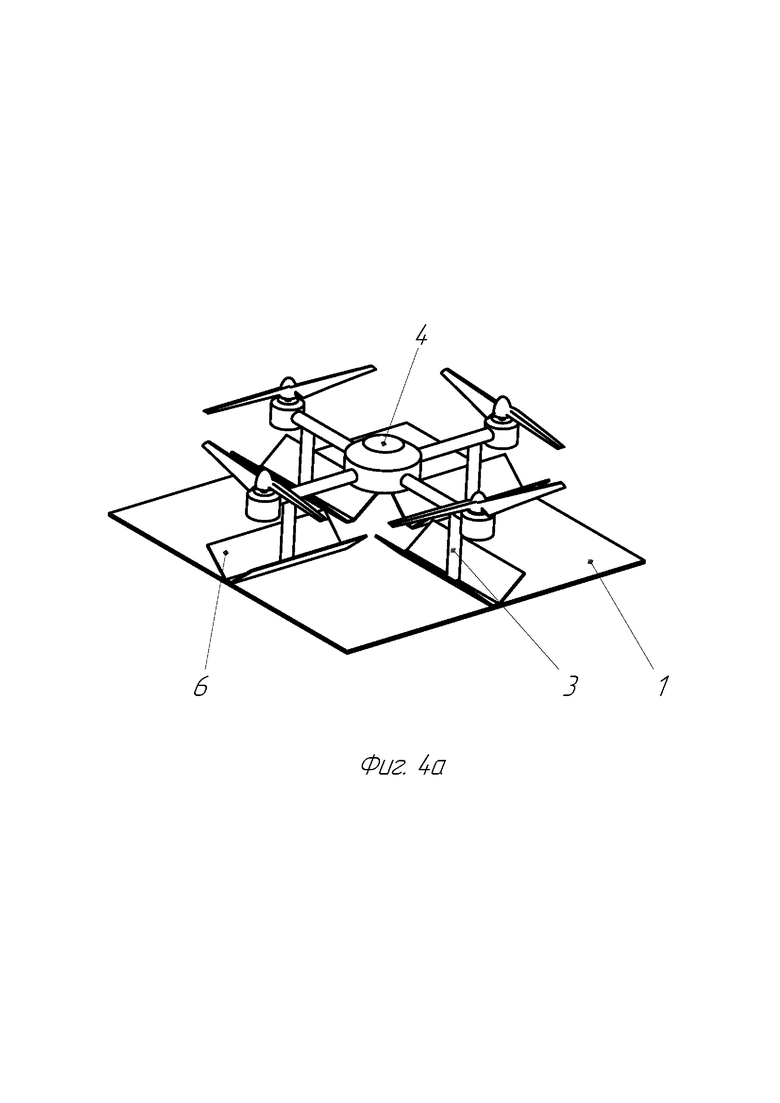
На фиг. 4а изображен вариант исполнения посадочной площадки с радиально установленными на корпус направляющими в виде V-образного профиля, количество которых равно количеству опор принимаемого БПЛА.
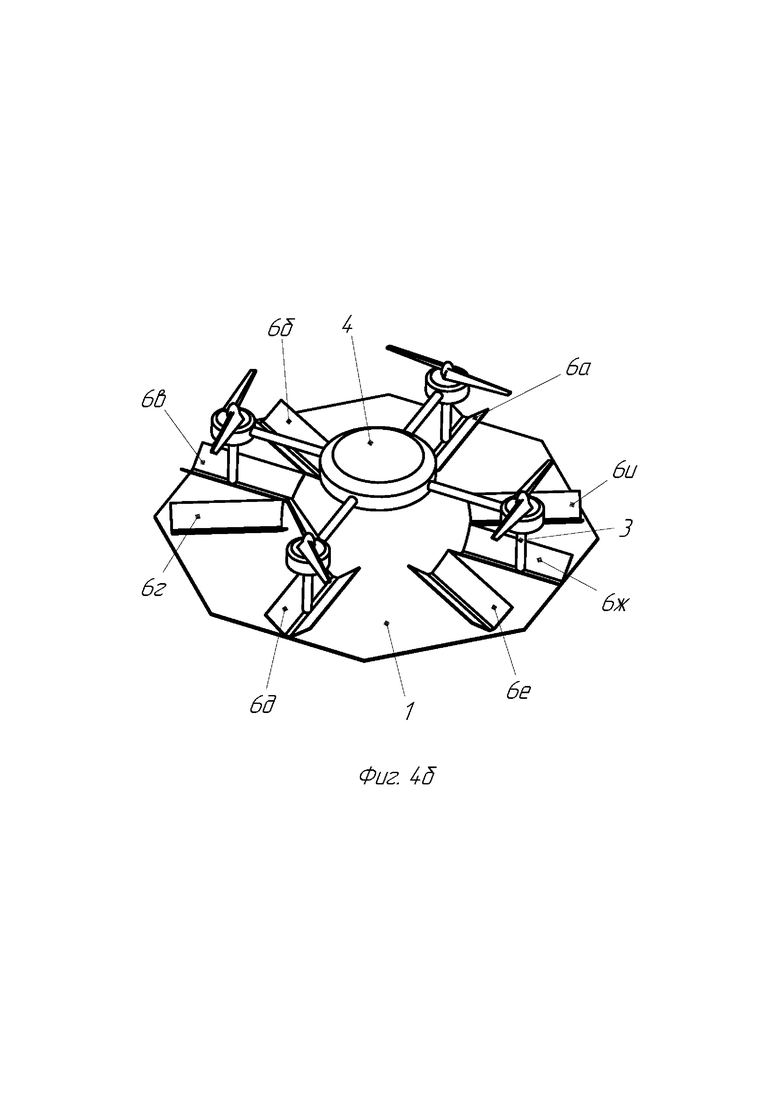
На фиг. 4б и 4в изображен вариант исполнения посадочной площадки с восемью радиально установленными на корпус направляющими в виде V-образного профиля.
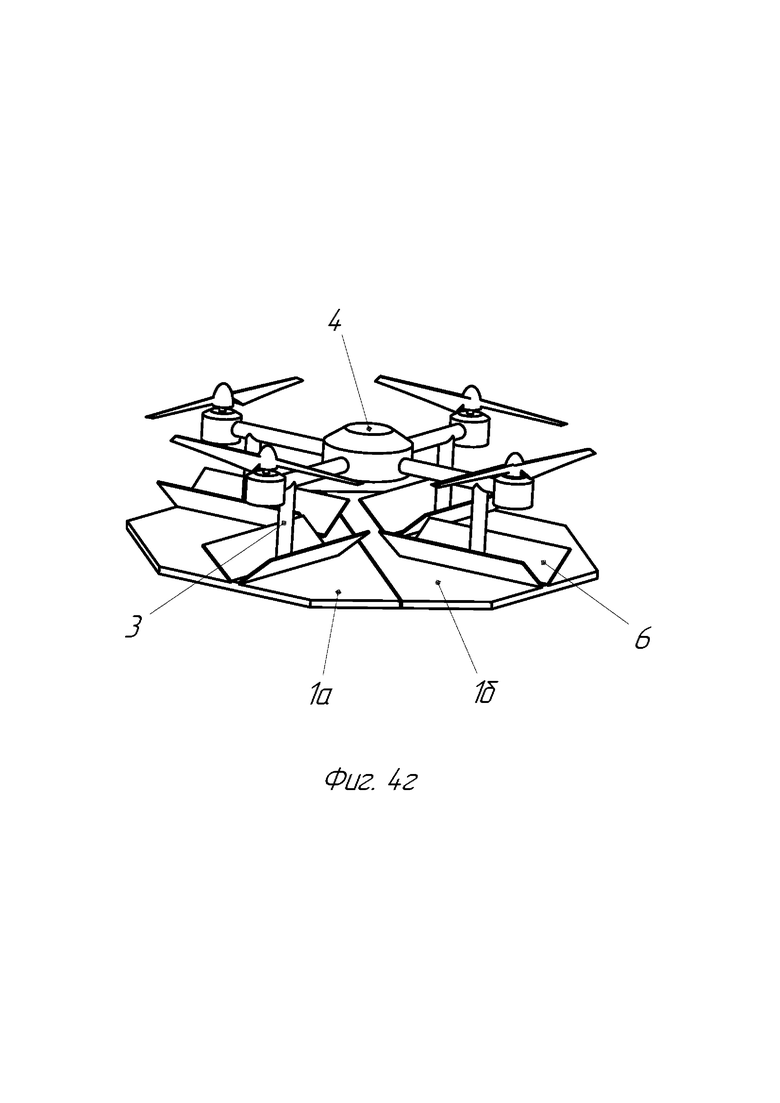
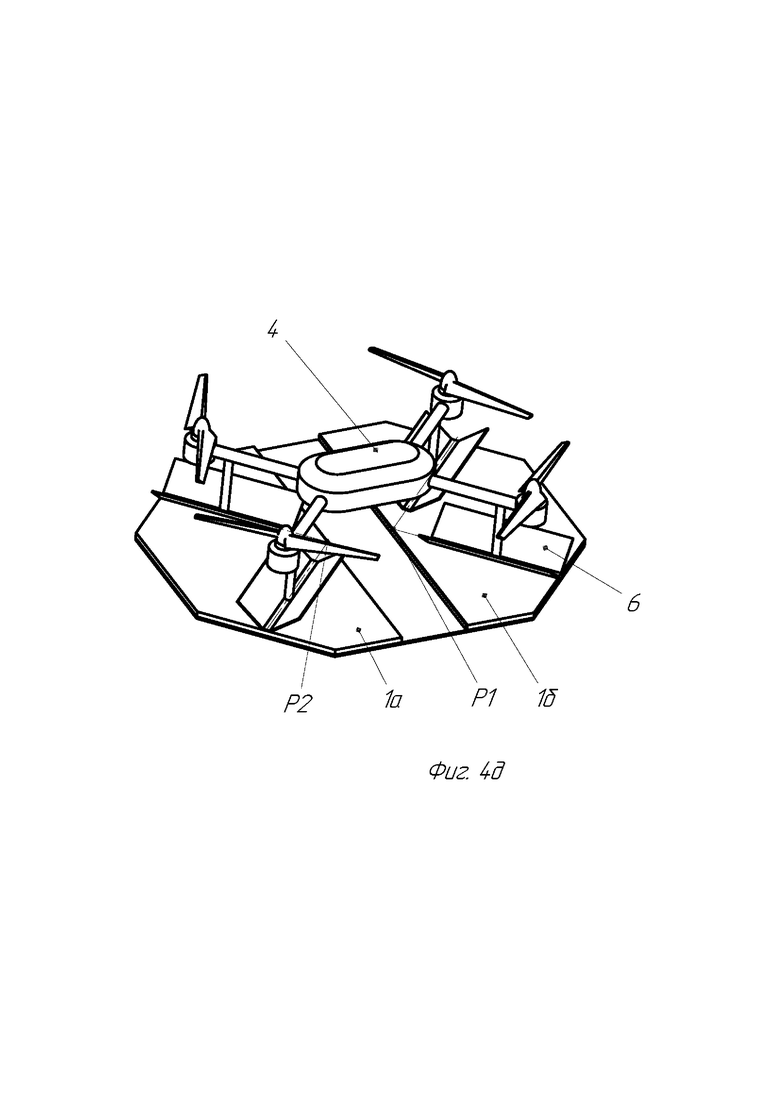
На фиг. 4г, 4д изображен вариант исполнения посадочной площадки, корпус которой состоит из двух частей.
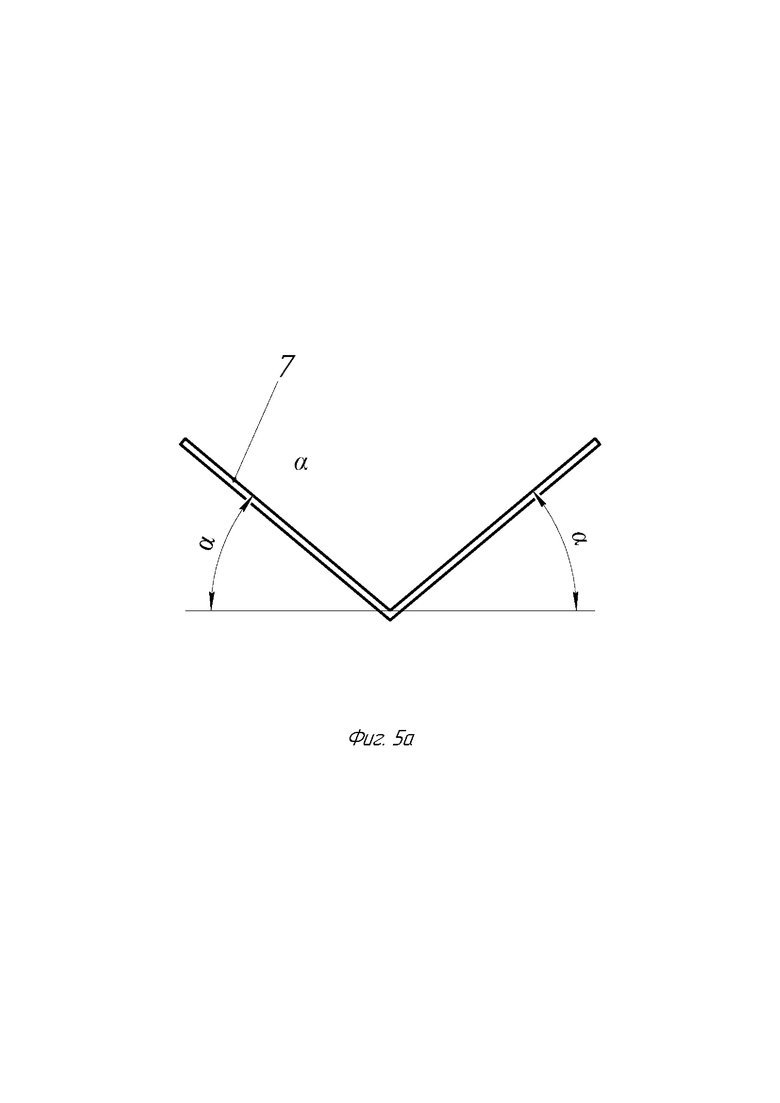
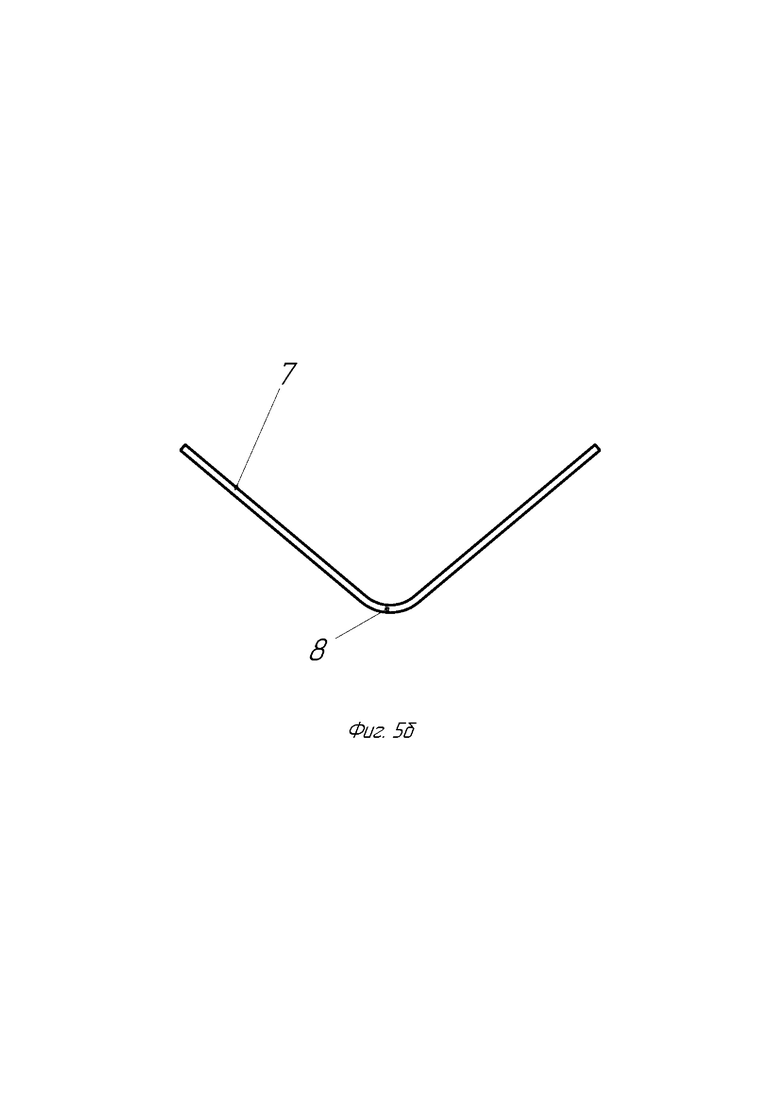
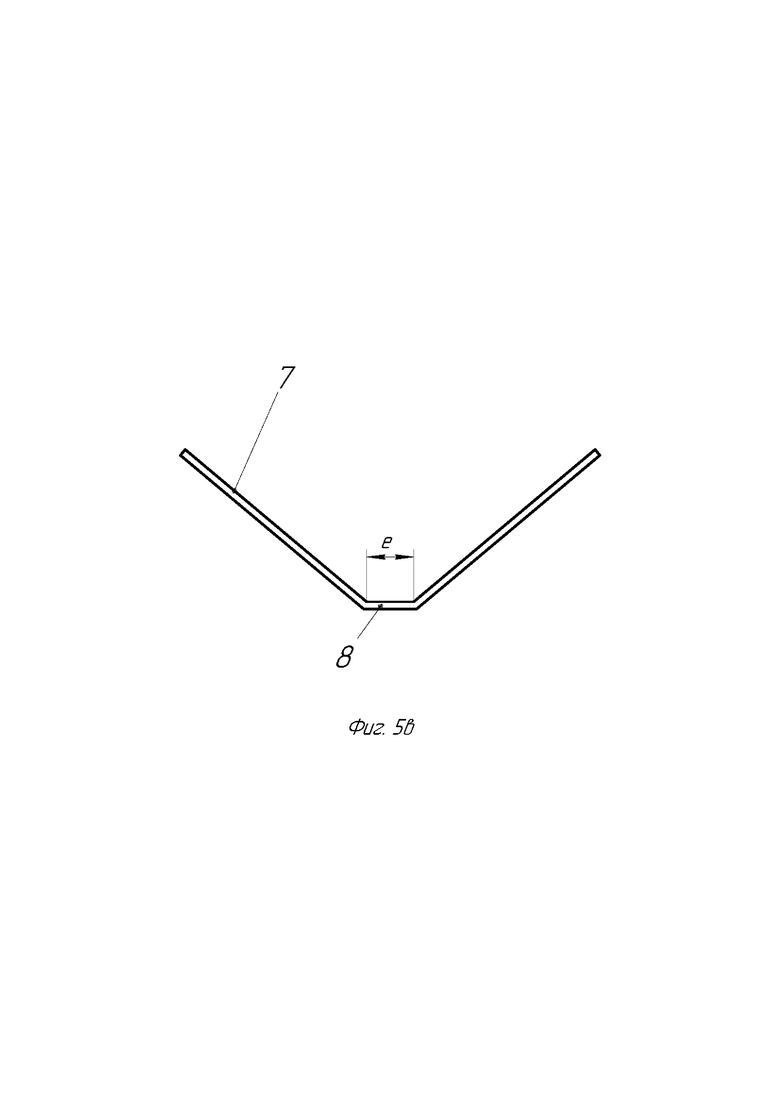
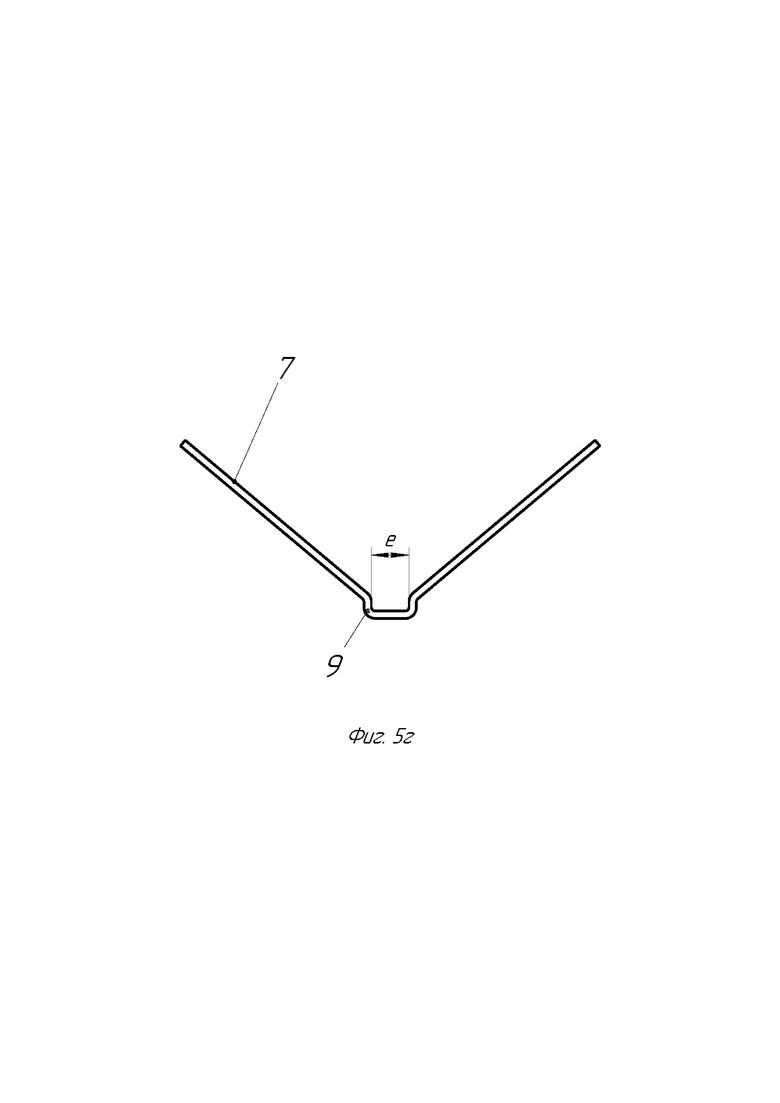
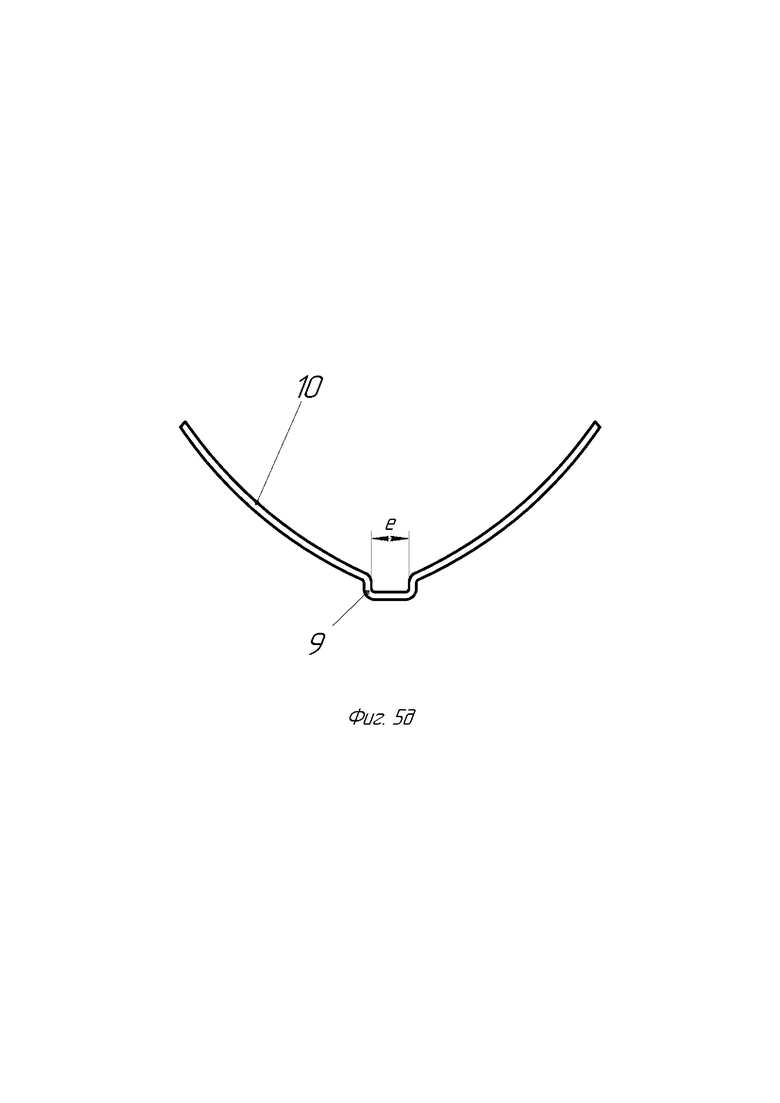
На фиг. 5а -5д представлены примеры форм профиля V-образных пазов или направляющих в виде V-образного профиля.
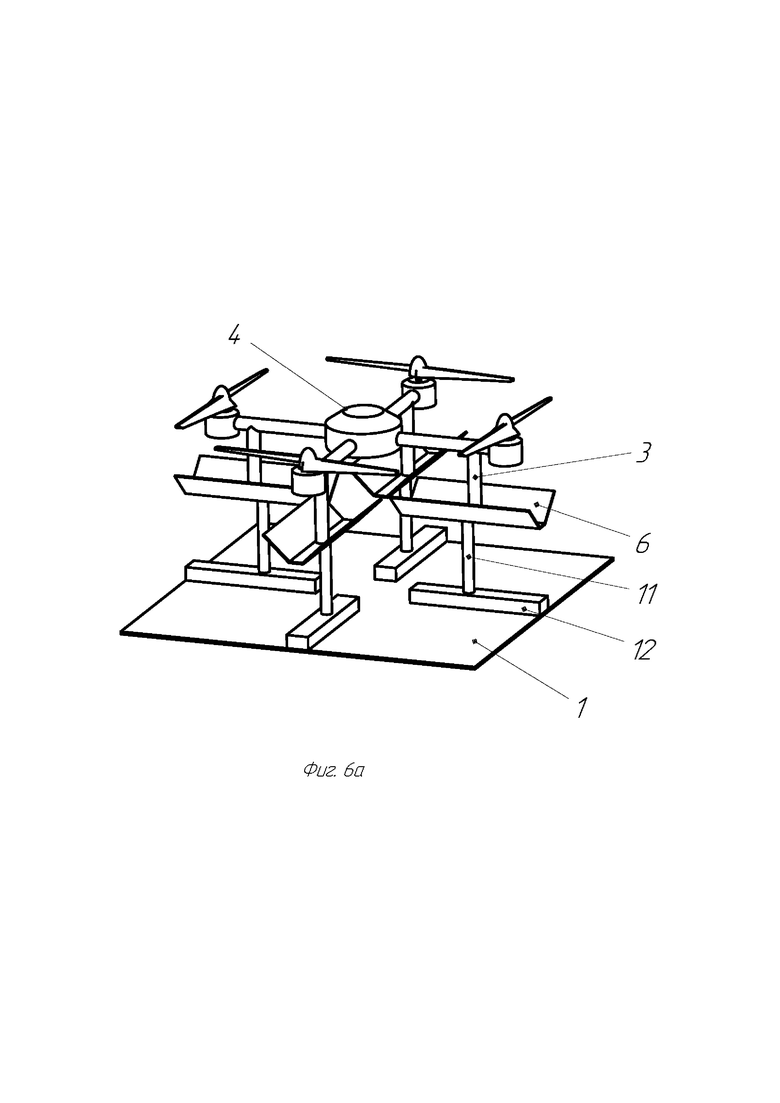
На фиг. 6а изображен вариант исполнения посадочной площадки с радиально установленными на стойки направляющими в виде V-образного профиля, количество которых равно количеству опор принимаемого БПЛА.
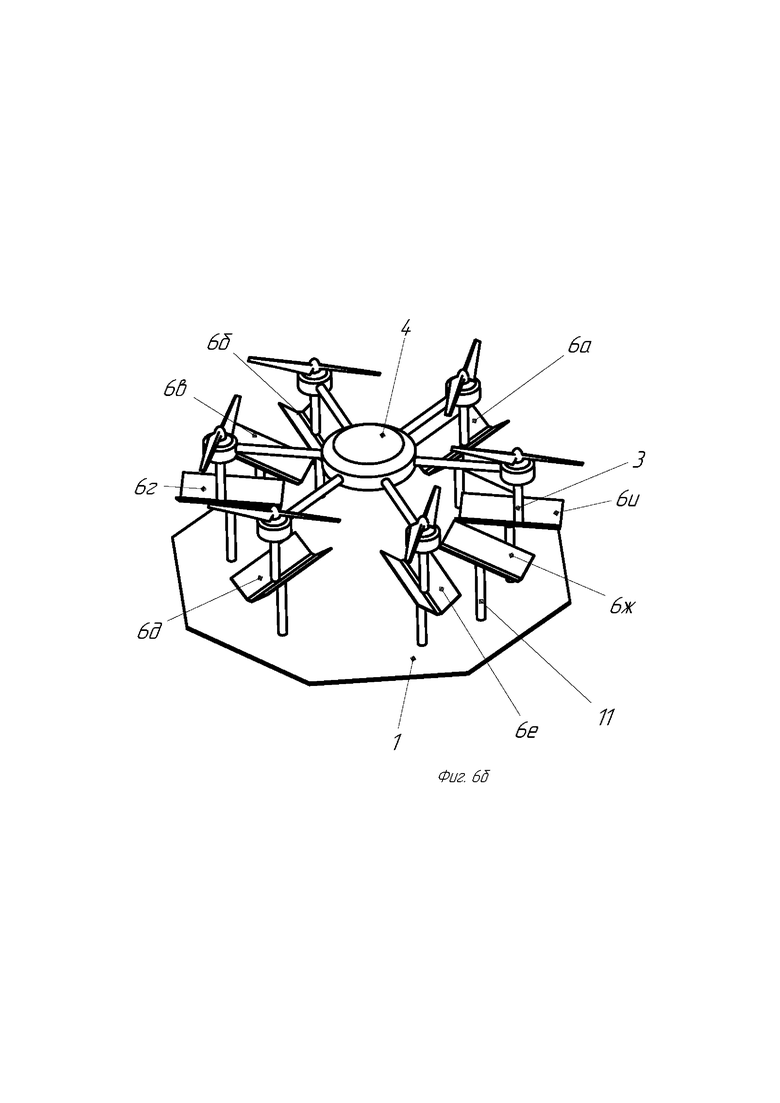
На фиг. 6б изображен вариант исполнения посадочной площадки с восемью радиально установленными на стойки направляющими в виде V-образного профиля.
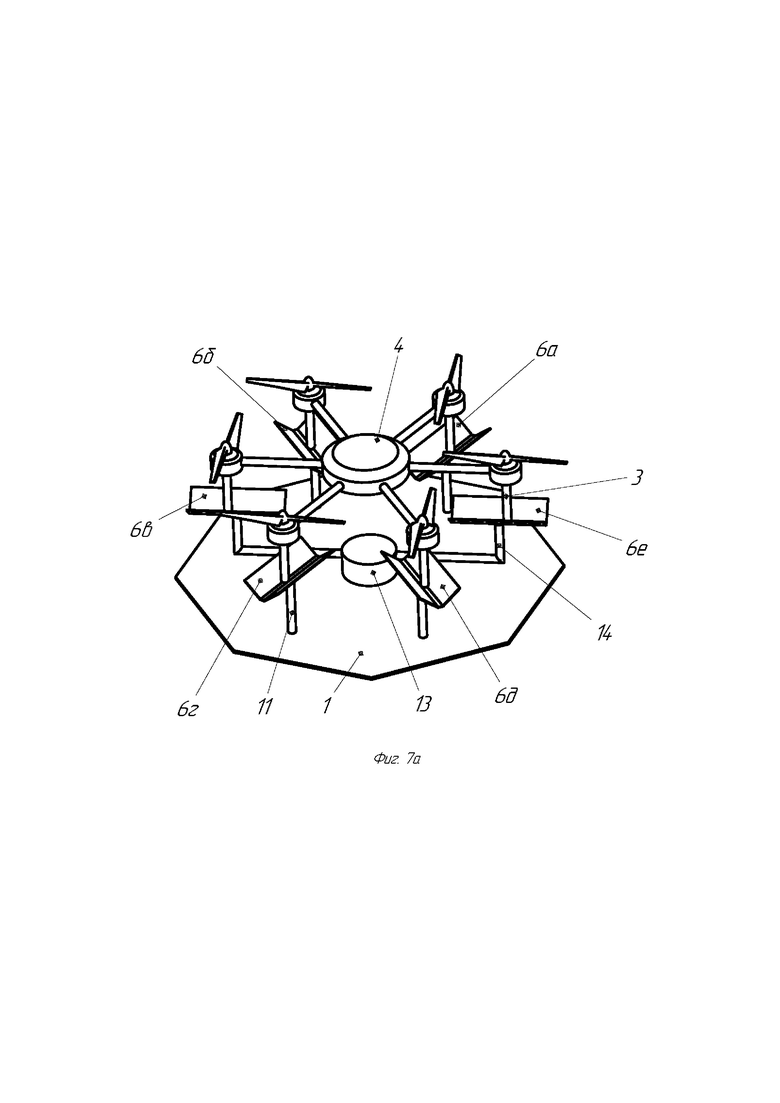
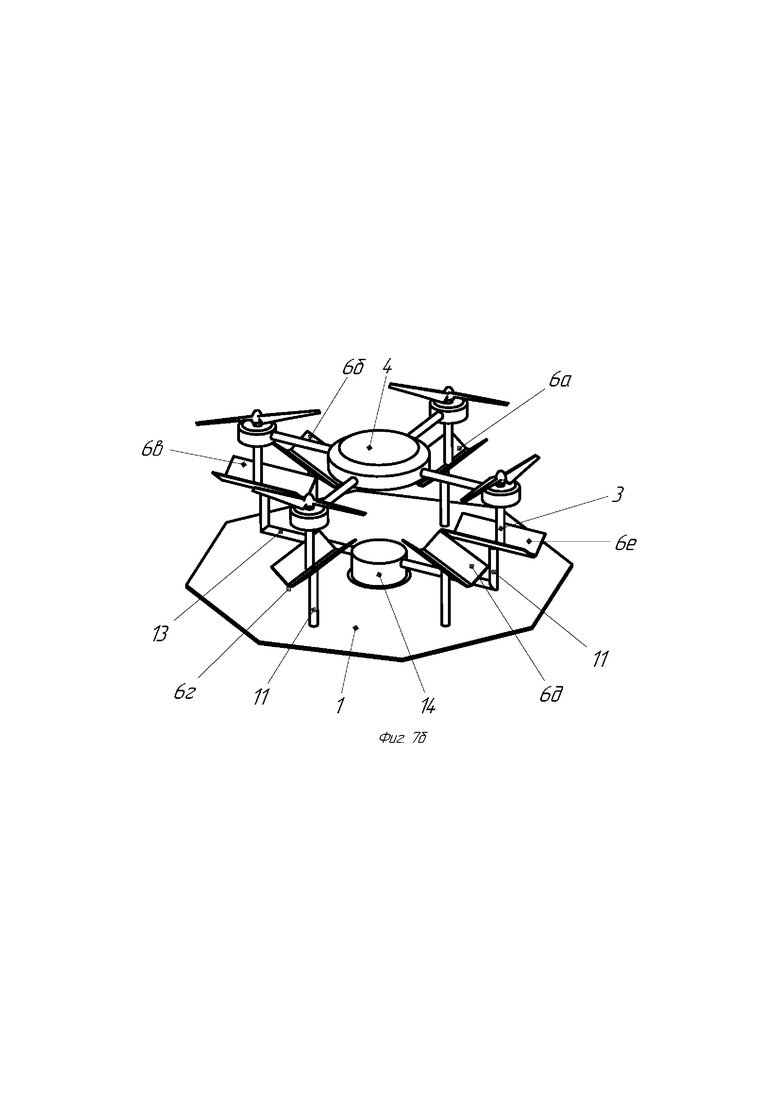
На фиг. 7а и 7б изображен вариант исполнения посадочной площадки с шестью радиально установленными на стойки направляющими в виде V-образного профиля, причем одна соосная пара направляющих установлена с возможностью поворота вокруг оси посадочной площадки.
Посадочная площадка вариант исполнения фиг. 1а и 1б содержит корпус 1, в котором выполнены радиально расположенные V-образные пазы 2, количество расположенных радиально V- образных пазов 2 равно количеству опор 3 принимаемого БПЛА 4, а угловое положение радиально расположенных V- образных пазов 2 соответствует угловому расположению опор 3 принимаемого БПЛА 4. V-образные пазы 2 сходятся в центре посадочной площадки. Корпус 1 может быть круглой, многоугольный или другой формы.
В варианте исполнения фиг. 1а корпус выполнен квадратной формы, содержит четыре V-образных паза 2 и предназначен для приема и позиционирования БПЛА 4 с четырьмя вертикальными опорами 3.
В варианте исполнения фиг. 1б корпус выполнен в виде шестигранника, содержит шесть V-образных пазов 2 и предназначен для приема и позиционирования БПЛА 4 с шестью вертикальными опорами 3.
Посадочная площадка, может содержать количество расположенных радиально V-образных пазов 2 больше количества опор 3 принимаемого БПЛА 4, и они могут быть расположены по окружности неравномерно.
Посадочная площадка вариант исполнения фиг. 2а и 2б содержит корпус 1, в котором выполнены восемь расположенных радиально V-образныхпазов 2, которые могут быть расположены по окружности неравномерно. Количество V-образных пазов 2 больше количества опор 3 принимаемого БПЛА 4. Корпус 1 посадочной площадки может содержать в центре глухое или сквозное отвертите 5, которое может иметь круглую или иную форму, что определяется формой корпуса БПЛА 4 или подвешенного груза (не показан).
На фиг. 2в изображена посадочная площадка варианта исполнения фиг. 2а, 2б вид сверху без приземлившегося БПЛА 4, и представлен порядок обозначения V-образных пазов 2 и углов их расположения. Принята полярная система координат, расположенная в центре посадочной площадки, полярная ось направлена вверх по фиг. 2в. V-образный паз 2а расположенный на полярной оси принят за первый паз. Отсчет остальных пазов происходит от первого паза 2а против часовой стрелки. Соответственно V-образные пазы 2а, 2б, 2в, 2г, 2д, 2е, 2ж, 2и расположены на угловых координатах α равных 0; 60; 90; 120; 180; 240,270 и 300 градусов. ̊
На фиг. 2а представлена посадочная площадка с приземлившимся БПЛА 4 с четырьмя опорами 3, которые находятся в V-образных пазах 2а, 2в, 2д и 2ж, на фиг. 2б представлена посадочная площадка с приземлившимся БПЛА 4 с шестью опорами 3, которые находятся в V-образный пазах 2а, 2б, 2г, 2д, 2е, 2и.
Посадочная площадка фиг. 2а, 2б получена наложением V-образных пазов 2 в виде шестилучевой звезды, на которую может приземляться БПЛА 4 с шестью равномерно расположенными опорами 3 и V-образных пазов 2 в виде креста, на который может приземляться БПЛА 4 с четырьмя равномерно расположенными опорами 3. В результате наложения два паза 2 совпали и образовалась посадочная площадка с восемью неравномерно расположенными пазами 2. На этом же принципе может быть построена посадочная площадка с иным количеством и расположением V-образных пазов 2, которая характеризуется как посадочная площадка, которая содержит количество расположенных радиально V- образных пазов 2 больше количества опор 3 принимаемого БПЛА 4 и они могут быть расположены по окружности неравномерно.
Корпус 1 посадочной площадки может быть выполнен из двух частей, которые могут раздвигаться вручную или с помощью привода линейных перемещений (не показано).
На фиг. 2г, 2д изображен вариант исполнения посадочной площадки, корпус 1 которой состоит из двух частей 1а и 1б.
На фиг. 2г части 1а и 1б корпуса сомкнуты между собой и все V-образные пазы 2 расположены радиально с центром в центре посадочной площадки. На посадочную площадку такой конфигурации приземляется БПЛА 4 с равным расположением опор 3 относительно центра БПЛА 4 (Х - образная схема). В этом случае посадочная площадка вариант исполнения фиг. 2г не отличается от посадочной площадки варианта исполнения фин. 1а, 1б.
На фиг. 2д части корпуса 1а и 1б раздвинуты между собой, V-образные пазы 2 на каждой части корпуса 1а и 1б расположены веером, которые сходятся в точках Р1 и Р2. На посадочную площадку такой конфигурации могут приземляться БПЛА 4 с удлиненным корпусом и разнесенным расположением опор 3 относительно центра БПЛА 4 (схема удлиненный Х).
Перемещение частей 1а и 1б корпуса позволяет расширить диапазон принимаемых конфигураций БПЛА 4.
На фиг. 3а изображена схема посадочной площадки с четырьмя V- образными пазами 2 и квадратным корпусом 1, на фиг. 3б изображена схема посадочной площадки с четырьмя V- образными пазами 2, круглым корпусом 1 и отверстием 5 в центре корпуса 1, которые позволяют определить соотношения размеров V-образных пазов 2 и размера принимаемого БПЛА 4.
Поз. 3а и 3б обозначены соответственно опоры 3 принимаемого БПЛА 4 наибольшего и наименьшего размера.
Приняты следующие обозначения размеров:
R - радиус кругового отклонения опор 3 БПЛА 4 при приземлении;
А1 - расстояние между диагонально расположенными опорами 3 БПЛА 4 наибольшего размера, принимаемого посадочной площадкой;
А2 - расстояние между диагонально расположенными опорами 3 БПЛА 4 наименьшего размера, принимаемого посадочной площадкой;
В - ширина V-образного паза 2 в верхней части;
С - максимальный размер корпуса посадочной площадки;
D - размер отверстия в центре посадочной площадки;
d - диаметр опор 3 принимаемого БПЛА 4.
Для нормальной работы посадочной площадки ширина В V-образных пазов 2 должна быть не меньше двух радиусов R кругового отклонения опор 3 БПЛА 4 при приземлении с учетом диаметра опор 3, т.е.
В ≥ 2R+d.
Расстояние между диагонально расположенными опорами 3 БПЛА 4 наибольшего размера, принимаемого посадочной площадкой, составляет
А1 = С -2R-d.
Расстояние между диагонально расположенными опорами 3 БПЛА 4 наименьшего размера, принимаемого посадочной площадкой для варианта исполнения посадочной площадки фиг. 1 (фиг. 3а), составляет
 В-d = 0.707В-d.
В-d = 0.707В-d.
Расстояние между диагонально расположенными опорами 3 БПЛА 4 наименьшего размера, принимаемого посадочной площадкой для варианта исполнения посадочной площадки фиг. 2 (фиг. 3б), составляет
А2 = D+2R+d.
Посадочная площадка для многовинтового БПЛА 4 вертикального взлета и посадки может содержать корпус 1, на котором установлены радиально направляющие 6 в виде V-образного профиля.
Вариант исполнения посадочной площадки фиг. 4а содержит корпус 1 и установленные радиально направляющие 6 в виде V-образного профиля. Количество направляющих 6 в виде V-образного профиля равно количеству опор 3 принимаемого БПЛА 4, а угловое положение направляющих 6 в виде V-образного профиля соответствует угловому расположению опор 3принимаемых БПЛА 4.
Посадочная площадка может содержать установленные радиально направляющие 6 в виде V-образного профиля, причем количество направляющих 6 в виде V-образного профиля больше количества опор 3 принимаемого БПЛА 4 и они могут быть расположены по окружности неравномерно.
Посадочная площадка вариант исполнения фиг. 4б и 4в содержит корпус 1, на котором радиально установлено восемь направляющих 6 в виде V-образного профиля. Направляющие 6а, 6б, 6в, 6г, 6д, 6е, 6ж и 6ирасположены на угловых координатах α равных 0, 60, 90, 120, 180,240, 270 и 300 градусов в полярной системе координат в соответствии с фиг. 2в.
Направляющие 6 в виде V-образного профиля могут быть установлены на модули линейного перемещения (не показаны), которые позволяют перемещать их в радиальном направлении.
Посадочная площадка фиг. 4б, 4в получена наложением направляющих 6 в виде V-образного профиля в виде шестилучевой звезды, на которую может приземляться БПЛА 4 с шестью равномерно расположенными опорами 3 и направляющих 6 в виде V-образного профиля в виде креста, на который может приземляться БПЛА 4 с четырьмя равномерно расположенными опорами 3. В результате наложения две направляющих 6 в виде V-образного профиля совпали и образовалась посадочная площадка с восемью неравномерно расположенными пазами 2. На этом же принципе может быть построена посадочная площадка с иным количеством и расположением направляющих 6 в виде V-образного профиля, которая характеризуется как посадочная площадка, которая содержит радиально установленные направляющих 6 в виде V-образного профиля, причем количество направляющих 6 в виде V-образного профиля больше количества опор 3 принимаемого БПЛА 4, и они могут быть расположены по окружности неравномерно.
На фиг. 4б представлена посадочная площадка с приземлившимся БПЛА 4 с четырьмя опорами 3, которые находятся в направляющих6а, 6в, 6д и 6ж, на фиг. 4впредставлена посадочная площадка с приземлившимся БПЛА 4 с шестью опорами 3, которые находятся в направляющих6а, 6б, 6г, 6д, 6е и 6и.
На фиг. 4г, 4д изображен вариант исполнения посадочной площадки, корпус 1 которой состоит из двух частей 1а и 1б.
На фиг. 4г части 1а и 1б корпуса сомкнуты между собой и все направляющие 6 в виде V-образного профиля установлены радиально с центром в центре посадочной площадки. На посадочную площадку такой конфигурации приземляется БПЛА 4 с равным расположением опор 3 относительно центра БПЛА 4 (Х - образная схема). В этом случае посадочная площадка вариант исполнения фиг. 4г не отличается от посадочной площадки варианта исполнения фиг. 4а.
На фиг.4д части корпуса 1а и 1б раздвинуты между собой, направляющие 6 в виде V-образного профиля на каждой части корпуса 1а и 1б расположены веером, которые сходятся в точках Р1 и Р2.На посадочную площадку такой конфигурации могут приземляться БПЛА 4 с удлиненным корпусом и разнесенным расположением опор 3 относительно центра БПЛА 4 (схема удлиненный Х).
Перемещение частей 1а и 1б корпуса позволяет расширить диапазон принимаемых конфигураций БПЛА 4.
Направляющие 6 в виде V-образного профиля могут быть выполнены, например, гибкой из листового материала в виде уголка фиг. 5а острой формы с боковыми стенками 7 плоской формы. Угол наклона стенок 7 к горизонту α, должен быть больше угла трения материала направляющее 6 и опоры 3 БПЛА 4, которая равна
α>arctgμ,
Где μ - коэффициент трения между материалом стенки 7 направляющих6 в виде V-образного профиля и опоры 3 принимаемого БПЛА 4.
Направляющие 6 в виде V-образного профиля могут быть также выполнены в виде уголка как на фиг. 5б с радиусным закругленным основанием 8, в виде уголка как на фиг. 5в плоским основанием 8, в виде уголка как на фиг. 5г, нижняя часть 9 которого согнута в виде перевернутой буквы П. В любом из предоставленных вариантов угол наклона боковых стенок 7 должен быть больше угла трения материала направляющей6и опоры 3 БПЛА 4. Ширина е плоского основания 8 (фиг. 5в), или внутренний размер е нижней части 9 (фиг. 5г, 5д) в виде перевернутой буквы П выполнена равным или больше диаметра d опор 3 принимаемого БПЛА 4.
Угол наклона профильной боковой стенки 10 направляющих6 в виде V-образного профиля фиг. 5двыполнен переменным, но он не может быть меньше угла трения материала направляющей6 и опоры 3 БПЛА 4. Соединение стенок 10 могут сопрягаться под углом друг другу (как на фиг. 5а), с радиусным закругленным основанием 8 (как на фиг. 5б), с плоским основанием 8 (фиг.5в) или нижней частью 9, согнутой в виде перевернутой буквы П, как представлено на фиг. 5д.
Все вышесказанные варианты выполнения V-образного профиля могут применяться и вариантах посадочной площадки фиг. 1а, 1б. В частности, в варианте исполнения посадочной площадки исполнения фиг. 1а и 1б использован V-образный паз 2, геометрия которого соответствует фиг. 5а.
Посадочная площадка вариант исполнения фиг. 6а содержит корпус 1 и установленные радиально направляющие 6 в виде V-образного профиля, количество которых равно количеству опор 3 принимаемого БПЛА 4. Угловое расположение направляющих 6 в виде V-образного профиля соответствует угловому расположению опор 3 принимаемых БПЛА 4. Направляющие 6 в виде V-образного профиля установлены на стойки 11, которые могут быть установлены на корпус 1 жестко или имеют возможность перемещаться в радиальном направлении вручную или с помощью линейного привода, например, модулей линейного перемещения 12. Таким образом, размер D (на фиг. 6а не показано, см. фиг. 3б) отверстия в центре посадочной площадки может регулироваться, то есть расстояние между направляющими 6 и размер посадочной площадки С (на фиг. 6а не показано, см. фиг. 3б) могут регулироваться.
Посадочная площадка вариант исполнения фиг. 6б содержит корпус 1, на котором радиально установлено восемь направляющих 6 в виде V-образного профиля. Направляющие 6а, 6б, 6в, 6г, 6д, 6е, 6ж и 6и расположены на угловых координатах α равных 0, 60, 90, 120, 180, 240, 270 и 300 градусов в полярной системе координат в соответствии с фиг. 2в и установлены на стойки 11, которые могут быть установлены на корпус 1 жестко или с возможностью перемещения в радиальном направлении вручную или с помощью линейного привода, например, модуля линейного перемещения 12. Таким образом, размер D (на фиг. 6б не показано, см. фиг. 3б) отверстия в центре посадочной площадки может регулироваться, то есть расстояние между направляющими 6 и размер посадочной площадки С (на фиг. 6б не показано, см. фиг. 3б), могут регулироваться.
Высота расположения направляющих 6 определяется из условия размещения других компонентов, необходимых для обслуживания БПЛА 4 после приземления, или из условия минимизации влияния корпуса 1 на работу воздушных винтов БПЛА 4 при приземлении и взлете.
По крайней мере часть направляющих 6 посадочной площадки, помимо движения в радиальном направлении, могут иметь возможность движения вертикально вверх-вниз и вращения относительно вертикальной оси центра посадочной площадки. Это позволяет опустить нерабочие направляющие 6 вниз и оставить на рабочей позиции те направляющие 6, на которые приземляются опоры 3 БПЛА 4, количество которых равно количеству опор 3 принимаемого в данный момент БПЛА 4, и развернуть их под таким углом, чтобы их оси совпали с осями приземляющегося и позиционируемого БПЛА 4. Таким образом, посадочная площадка имеет количество направляющих 6 равное максимальному количеству опор 3 БПЛА 4 и становится универсальной. Опускание нерабочих направляющих 6 позволяет получить минимальное расстояние между соосными направляющими, то есть уменьшить размер центрального отверстия 5.
Посадочная площадка вариант исполнения фиг. 7а, 7б содержит корпус 1 и установленные радиально шесть направляющих 6а, 6б, 6в, 6г, 6д, 6е в виде V-образного профиля. При этом четыре (две расположенных соосно пары) направляющих 6а, 6в, 6г, 6д установлены на стойки 11, которые могут быть установлены на корпус 1 жестко или с возможностью перемещения в радиальном направлении. Две направляющие 6б и 6д (одна соосная пара) установлены на стойки 11, которые установлены на общий или индивидуальнее приводы вращения 13 посредством коромысла 14.
На фиг. 7а направляющие 6 V-образного профиля расположены радиально равномерно по кругу, угловое расположение направляющих 6 V-образного профиля соответствует угловому расположению опор 3 принимаемых БПЛА 4.
На фиг. 7б направляющие 6в и 6е V- образного профиля повернуты на 30 градусов по часовой стрелке таким образом, что направляющие 6а, 6г стали перпендикулярны направляющим 6в, 6е. На посадочную площадку приземлен БПЛА 4 с четырьмя опорами 3, которые размещены на направляющих 6а, 6в, 6г и 6е. Направляющие 6б и 6д свободны.
Стойки 11 могут быть выполнена в виде актуатора линейного перемещения и могут изменять высоту расположения установленных на них направляющих 6 V-образного профиля.
Возможен вариант исполнения посадочных площадок фиг. 4а, 4б, 4в, 4г, фиг. 6а, 6б, фиг. 7а, 7б в которых направляющие 6 в виде V-образного профиля выполнены из электропроводного материала и соединены с зарядным устройством или устройством связи с БПЛА 4 в период нахождения его на посадочной площадке. Крепление направляющих 6 при этом производится через электроизоляционные материалы. Соответственно, опоры 3 принимаемого БПЛА 4 должны иметь ответные контакты на нижней плоскости.
Посадочная площадка, как правило, входит в состав посадочной платформы, которая включает в себя необходимое для приема и обслуживания БПЛА 4 электрическое и электронное оборудование, средства идентификации для обеспечения приземления БПЛА 4 по видеокамере или с помощью других датчиков, может содержат защищенный корпус с крышкой, средства обеспечения микроклимата в защищенном корпусе и т.п. В графическом материале посадочная платформа и указанные средства не представлены.
Посадочная площадка работает следующим образом.
БПЛА 4 приземляется на посадочную площадку ориентируясь по видеокамере или другим датчикам идентификации посадочной платформы. Задача приземления - попасть в центр посадочной площадки и принять правильную ориентацию относительно осей посадочной площадки. Однако, вследствие неточности работы системы управления БПЛА 4 и погодных условий приземления, особенно порывистого ветра, происходит отклонение от требуемой точки приземления. БПЛА 4 характеризуется в том числе точностью приземления, которая определяется радиусом R кругового отклонения опор 3 БПЛА 4 при приземлении. Важно, чтобы каждая опора 3 БПЛА 4 при приземлении попала на V-образный паз 2 (фиг. 1а, 1б, 2а, 2б) или направляющие 6 в виде V-образного профиля (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б). Это условие выполняется, если ширина В V-образных пазов 2 (фиг. 1а, 1б, 2а, 2б) илинаправляющих6 (фиг4а, 4б, 4в, 6а, 6б, 7а, 7б) не меньше двух радиусов R кругового отклонения опор 3 БПЛА 4 при приземлении с учетом диаметра dопор 3. Попав внутрь V-образныхпазов2 (фиг. 1а, 1б, 2а, 2б) или направляющих6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б) в верхней части, опоры 3 продолжают падение до контакта с одной из наклонных стенок 7 V-образных пазов 2 (фиг. 1а, 1б, 2а, 2б) или направляющих 6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б), далее, при продолжении падения, каждая опора 3 взаимодействует с контактируемой стенкой 7 и скользя по ней останавливается на осевой линии V-образного паза 2 (фиг. 1а, 1б, 2а, 2б) или направляющей 6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б). Контактирующая с опорой 3 стенка 7 позволяет опоре 3 свободно двигаться вдоль V-образного паза 2 (фиг. 1а, 1б, 2а, 2б) или направляющей 6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б) и оказывает воздействие только в направлении перпендикулярном данного V-образного паза 2 (фиг. 1а, 1б, 2а, 2б) или направляющей 6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б). Таким образом каждая опора 3 получает только одно направление воздействия перпендикулярно направлению V-образного паза 2 (фиг. 1а, 1б, 2а, 2б) или направляющей 6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б), в которой она находится, и после приземления встает на осевую линию соответствующего V-образного паза 2 (фиг. 1а, 1б, 2а, 2б) или направляющей 6 (фиг. 4а, 4б, 4в, 6а, 6б, 7а, 7б). Общее движение БПЛА 4 складывается как результат воздействия разнонаправленных сил на опоры 3. В результате этого БПЛА 4 в процессе приземления перемещается в центр посадочной площадки и имеет заданную относительно посадочной площадки ориентацию независимо от расстояния между опорами 3.
Это отличает данную посадочную площадку от прототипа, в котором воздействие конической направляющей на опору направлено радиально к центру конуса, зависит от места касания опорой боковой стенки конуса, и при любом попадании опоры в направляющие приводит каждую опору в центр соответствующего конуса, что предполагает равенство межосевых расстояний опор БПЛА и конусных направляющих. Вследствие этого посадочные площадки данного типа используются только с БПЛА, межосевое расстояние между опорами которыми равно расстоянию между осями конических направляющих данной посадочной площадки.
Таким образом, форма выполнения направляющих 6 посадочной площадки и их расположение позволили достичь нового качества посадочной площадки, а именно возможность принимать и позиционировать БПЛА 4 различных размеров с различным расстоянием между опорами 3. Посадочная площадка становится универсальной, пригодной для приема БПЛА 4 различных размеров с количеством опор 3, равным количеству направляющих 6.
Выполнение боковых стенок 10 (фиг. 5д) V-образных пазов 2 или направляющих 6 профильными с переменным углом наклона позволяет управлять процессом позиционирования. Большой угол наклона стенок 10 в верхней части позволяет снизить горизонтальную составляющую скорости БПЛА 4 и исключить возможность его вылета из пазов 2 или направляющих 6. Пологий угол наклона в нижней части позволяет снизить скорость опускания БПЛА 4 и исключает перескок опор 3 со стенки на стенку.
Для V-образных пазов 2 или направляющих 6 в виде уголка фиг. 5а острой формы наиболее подходит БПЛА 4, концы опор 3 которого выполнены скругленными, в виде конуса или клина с тем же или меньшим углом в вершине, что и у принимающих V-образных пазов 2 или направляющих 6. Такая форма V-образных пазов 2 или направляющих 6 обеспечивает достаточно точное позиционирование БПЛА 4 на посадочной площадке. V-образные пазы 2 или направляющие 6 в виде уголка фиг. 5б с радиусным закругленным основанием 8 предназначены для приема БПЛА 4, опоры 3 которого также закруглены. Для V-образных пазов 2 или направляющих 6 в виде уголка фиг. 5в с плоским основанием 8, уголка фиг. 5г, нижняя часть которого согнута в виде перевернутой буквы П или с профильными боковыми стенками и нижней частью, согнутой в виде перевернутой буквы П (фиг. 5г, 5д) наиболее подходит БПЛА 4 с опорами 3, с плоскими основанием. Такая форма V-образных пазов 2 или направляющих 6 обеспечивает достаточно надежное удержание приземлившегося БПЛА 4 на посадочной платформу в условиях воздействия ветровых нагрузок на БПЛА 4.
Вариант исполнения посадочной площадки фиг. 6а, 6б с направляющими 6, которые установлены радиально на стойки 11, позволяет иметь пространство под БПЛА 4 для размещения компонентов, необходимых для обслуживания БПЛА 4 после приземления и снижает экранный эффект при приземлении и взлете БПЛА 4.
Установка стоек 11 на модули линейного перемещения 12 позволяет регулировать расстояние между направляющими 6, которое определяет размер D отверстия (аналогично как на фиг. 3б) в центре посадочной площадки и размер посадочной площадки С. Это позволяет расширить диапазон размеров принимаемых БПЛА 4, а также увеличить центральное отверстие 5 посадочной площадки для груза БПЛА 4, который может быть больше корпуса БПЛА 4. До приземления БПЛА 4 с помощью модулей линейного перемещения 12 стойки 11 с направляющими 6 перемещаются радиально от центра или к центру и выставляют требуемое расстояние между направляющими 6. Расстояние D между направляющими 6 выбирается исходя из расстояния между расположенными диагонально опорами 3 БПЛА 4 или размера груза, который размещен под БПЛА 4.
В вариантах исполнения посадочных площадок фиг. 2а, 2б, 4б, 4в, 6б, содержащих восемь V-образных пазов 2 или направляющих 6, которые расположены на углах 0, 60, 90, 120, 180, 240, 270 и 300 градусов, позволяет принимать БПЛА 4 с тремя, четырьмя и шестью опорами 3.
При приеме БПЛА 4 с тремя опорами 3 БПЛА приземляется на V-образные пазы 2а, 2г, 2е или 2б, 2д, 2и или направляющие 6а, 6г, 6е или 6б, 6д, 6и.
При приеме БПЛА 4 с четырьмя опорами 3 БПЛА 4 приземляется на V-образные пазы 2а, 2в, 2д, 2ж или направляющие 6а, 6в, 6д, 6ж.
При приеме БПЛА 4 с шестью опорами 3 БПЛА 4 приземляется на V-образные пазы 2а, 2б, 2г, 2д, 2е, 2и или направляющие 6а, 6б, 6г, 6д, 6е, 6и.
На посадочной площадке, направляющие 6 которой могут перемещаться в вертикальном направлении и вращаться вокруг вертикальной оси перед приземлением БПЛА 4, оставляют на рабочей позиции количество направляющих 6, равно количеству опор 3 БПЛА 4. Остальные направляющие 6 опускаются вниз, чтобы они не препятствовали вращению направляющих 6, находящихся в рабочей позиции.
Вариант исполнения посадочной площадки фиг. 7а, 7б с шестью радиально установленными на стойки 11 направляющими 6 в виде V-образного профиля, на которой одна соосная пара направляющих 6в и 6е установлена с возможностью поворота вокруг оси посадочной площадки, и позволяет принимать БПЛА 4 с тремя, четырьмя и шестью опорами 3.
Для приема БПЛА 4 с тремя и шестью опорами 3направляющие 6 расположены равномерно по окружности. БПЛА 4 с тремя опорами 3 приземляется опорами 3на направляющие 6а, 6в, 6д или 6б, 6г, 6е. БПЛА 4 с шестью опорами 3 БПЛА 4 приземляется опорами 3 на все направляющие 6.
Для приема БПЛА 4 с четырьмя опорами 3 привод вращения 14поворачивает коромысло 13 с установленными на стойках 11 направляющими 6в, 6е по часовой стрелке на 30 градусов таким образом, что направляющие 6в, 6е становятся перпендикулярно направляющим 6а, 6г. При этом направляющие 6б, 6д могут быть опущены вниз. БПЛА 4 приземляется опорами 3 на направляющие 6а, 6в, 6г, 6е.
Таким образом варианты исполнения посадочной площадки с восемью V- образными пазами 2 или с восемью направляющими 6 в виде V-образного профиля и посадочная площадка с шестью V-образными пазами 2 или с шестью направляющими 6 в виде V-образного профиля, в котором одна соосная пара направляющих 6 установлена с возможностью поворота вокруг оси посадочной площадки способны принимать и позиционировать БПЛА 4 различных размеров с различным количеством опор 3.
Посадочные площадки варианты исполнения фиг. 2г, 2д, 4г, 4д позволяют приземлять и позиционировать БПЛА 4 с равным расположением опор 3 относительно центра БПЛА 4 (Х - образная схема). В этом случае посадочная площадка вариант исполнения фиг. 4г не отличается от посадочной площадки варианта исполнения фиг. 4а.
Для приема БПЛА 4 с удлиненным корпусом и разнесенным расположением опор 3 относительно центра БПЛА 4 (фиг. 2д и 4д схема удлиненный Х), опоры 3 которого образуют прямоугольник, части 1а и 1б корпуса раздвигают между собой таким образом, чтобы оси симметрии V-образных пазов 2 или направляющих 6 совпали с вершинами прямоугольника расположения опор 3 БПЛА 4.
В варианте исполнения посадочных площадок фиг. 4а, 4б, 4в, 4г, 6а, 6б, 7а, 7б, в которых направляющие 6 выполнены из электропроводного материала и соединены с зарядным устройством или устройством связи с БПЛА 4при приземлении БПЛА 4, устанавливается электрическое соединение между БПЛА 4 и посадочной площадкой, и в период нахождения его на посадочной площадке может подаваться напряжение для зарядки аккумулятора БПЛА 4 или производиться обмен информацией с ним.
Таким образом разработана посадочная площадка с гравитационным позиционированием принимаемого БПЛА, которая способна принимать и позиционировать БПЛА различных размеров с различным расстоянием между опорами и различным количеством опор.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем (варианты) | 2022 |
|
RU2788099C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Способ приземления БПЛА на посадочную платформу | 2020 |
|
RU2739636C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Усовершенствованная универсальная подвесная рамочная потолочная и стеновая система из панелей с гибким декоративным материалом и способ его крепления | 2018 |
|
RU2694635C1 |
| БПЛА вертикального взлета и посадки | 2020 |
|
RU2747006C1 |

Группа изобретений относится к устройству посадочных площадок для многовинтовых БПЛА вертикального взлета и посадки. Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки содержит корпус, в котором выполнены радиально расположенные V-образные пазы или на котором радиально установлены направляющие в виде V-образного профиля. Количество расположенных радиально V-образных пазов или направляющих больше количества опор принимаемого БПЛА. Достигается возможность принимать и позиционировать БПЛА различных размеров, с различным количеством опор и с различным расстоянием между опорами. 2 н. и 12 з.п. ф-лы, 7 ил.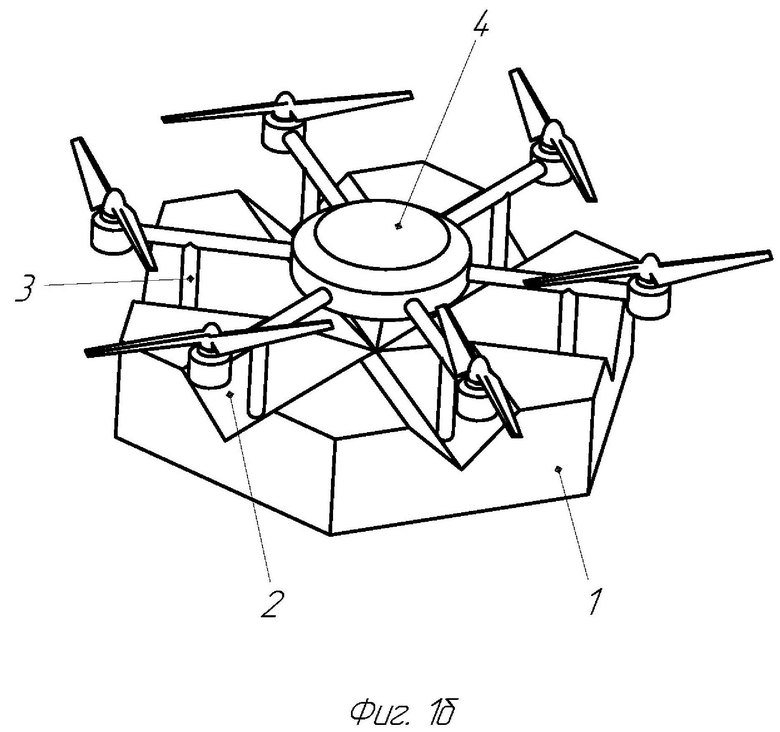
1. Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки, содержащая корпус, в котором выполнены радиально расположенные V-образные пазы, при этом количество расположенных радиально V-образных пазов больше количества опор принимаемого БПЛА.
2. Посадочная площадка по п. 1, отличающаяся тем, что расположенные радиально V-образные пазы расположены по окружности неравномерно.
3. Посадочная площадка по п. 1 или 2, отличающаяся тем, что по крайней мере нижние части V-образных пазов покрыты электропроводящим материалом и представляют собой электрический контакт.
4. Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки, содержащая корпус, на котором радиально установлены направляющие в виде V-образного профиля, при этом количество направляющих в виде V-образного профиля больше количества опор принимаемого БПЛА.
5. Посадочная площадка по п. 4, отличающаяся тем, что направляющие в виде V-образного профиля расположены по окружности неравномерно.
6. Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки по п. 4, отличающаяся тем, что количество направляющих в виде V-образного профиля равно количеству опор принимаемого БПЛА, а угловое положение направляющих в виде V-образного профиля соответствует угловому расположению опор принимаемых БПЛА.
7. Посадочная площадка по п. 1 или 4, отличающаяся тем, что корпус выполнен из двух частей, которые могут раздвигаться.
8. Посадочная площадка по п. 1, или 2, или 4, или 5, отличающаяся тем, что в центре корпуса выполнено отверстие.
9. Посадочная площадка по п. 4 или 5, отличающаяся тем, что направляющие в виде V-образного профиля выполнены из листового материала.
10. Посадочная площадка по п. 4 или 5, отличающаяся тем, что направляющие в виде V-образного профиля установлены на вертикальные стойки.
11. Посадочная площадка по п. 4 или 5, отличающаяся тем, что направляющие в виде V- образного профиля имеют возможность перемещения в радиальном направлении.
12. Посадочная площадка по п. 4 или 5, отличающаяся тем, что по крайней мере часть установленных радиально направляющих в виде V-образного профиля имеют возможность поворота относительно вертикальной оси расположенной в центре посадочной площадки.
13. Посадочная площадка по п. 4 или 5, отличающаяся тем, что по крайней мере часть установленных радиально направляющих в виде V-образного профиля имеют возможность вертикального движения.
14. Посадочная площадка по п. 4 или 5, отличающаяся тем, что радиально установленные направляющие в виде V-образного профиля выполнены из электропроводного материала и представляют собой электрический контакт.
| CN 108945508 A, 07.12.2018 | |||
| CN 106864763 A, 20.06.2017 | |||
| CN 108001699 A, 08.05.2018 | |||
| CN 105966594 A, 28.09.2016 | |||
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |

