Изобретение относится к конструкции активных устройств позиционирования беспилотного летательного аппарата (далее – БПЛА) вертикального взлета и посадки, и может применяться при разработке автоматических станции зарядки и обслуживания БПЛА.
Как правило, отклонение БПЛА вертикального взлета и посадки от заданной точки посадки усложняет или не позволяет производить замену/зарядку аккумуляторов или производить какие-либо другие манипуляции с БПЛА в автоматическом режиме. Поэтому посадочные платформы БПЛА снабжаются пассивными или активными устройством позиционирования БПЛА в процессе или после посадки.
Известны автоматические станции зарядки и обслуживания БПЛА, в которых после посадки на платформу производится корректировка его местоположения каким-либо активным устройством (манипулятором), которое воздействует на опоры БПЛА.
Автоматическая станция, согласно заявке US 2014/0124621 A1, принимает БПЛА на плоскую посадочную платформу. Механизм позиционирования содержит две пары параллельных планок, которые установлены ортогонально друг другу. После посадки БПЛА механизм выравнивания перемещает попарно планками БПЛА в зону позиционирования, в которой осуществляется зарядка, замена аккумулятора или иной вид обслуживания. Для лучшего обслуживания БПЛА может дополнительно фиксироваться специальным устройством или механизмом выравнивания.
Согласно заявке WO 2017/221235 А1 механизм позиционирования БПЛА содержит всего две установленные встречно планки, на которых выполнены W – образные вырезы. Расстояние между внутренними точками вырезов равно расстоянию между опор принимаемого БПЛА вертикального взлета и посадки. Такое решение упрощает конструкцию и ускоряет процесс выравнивания.
Автоматическая станция, согласно заявке US 2014/0319272 A1, также принимает БПЛА на плоскую посадочную платформу, однако после этого БПЛА с помощью двух планок выводит аппарат их зоны посадки в зону зарядки и обслуживания.
Прототипом изобретения является посадочная платформа согласно заявке US20180148170 А1, которая содержит устройство для позиционирования БПЛА путем воздействия после посадки на его опоры. Устройство содержит установленную по центру платформы на вертикальной оси крестовину и пятачки контактов для подачи напряжения для зарядки аккумулятора БПЛА или связи с ним. После посадки БПЛА крестовина приводится во вращение. Взаимодействие крестовины с опорами БАЛА и опор с посадочной поверхностью приводят к вращению БПЛА и смещению его до совпадения вертикальной оси БПЛА и оси вращения крестовины. Вращение крестовины длится до тех пор, пока опоры БПЛА не встанут на пятачки.
Недостатком данного устройства является невысокая скорость позиционирования БПЛА, невысокая точность позиционирования после посадки БПЛА, отсутствие механизма удержания БПЛА в позиционированном положении.
Технической задачей изобретения является:
Создание устройства позиционирования быстродействующей посадочной платформы для БПЛА вертикального взлета и посадки с надежным удержанием БПЛА в точке позиционирования;
Создание устройства позиционирования для универсальной посадочной способной принимать различные типоразмеры принимаемых БПЛА;
Упрощение конструкции устройства позиционирования БПЛА вертикального взлета и посадки.
Технический результат достигается тем, что в устройстве позиционирования БПЛА вертикального взлета и посадки, содержащем установленные на посадочной площадке толкатели и механизм движения толкателей, толкатели выполнены из гибкого материала;
- в качестве гибкого материала используют шнур, трос, веревку, цепь и т. п.;
- на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, шкивы охватывает гибкий толкатель, выполненный в виде шнура, по меньшей мере один конец которого соединен с упругим элементом, в промежутках между шкивами к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги;
- на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, шкивы охватывает гибкий толкатель, выполненный в виде шнура, по меньшей мере один конец которого соединен с упругим элементом, в промежутках между шкивами установлены подвижные шкивы, которые толкают шнур центру;
- на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, между шкивами через один промежуток установлены упругие элементы, например пружины, между которыми через шкивы натянуты гибкие толкатели, выполненные в виде шнура, таким образом, что образуется замкнутый контур, к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги;
- на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, между шкивами через один промежуток установлены упругие элементы, например пружины, между которыми через шкивы натянуты гибкие толкатели, выполненные в виде шнура, таким образом, что образуется замкнутый контур, к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги;
- на посадочной площадке установлены две повернутые друг относительно друга группы шкивов, в каждой из которых шкивы расположены подобно расположению опор БПЛА, между парами шкивов, которые определяют длинные стороны образованного точками расположения шкивов многогранника, натянуты гибкие толкатели, выполненные в виде шнуров, которые с наружной стороны замкнуты с помощью упругих элементов, например, пружин, с внутренней стороны к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги;
- между концами упругих элементов, например пружин, соединен отрезок шнура, ограничивающий удлинение упругого элемента;
- по обе стороны упругих элементов на гибкий толкатель, выполненный в виде шнура установлены стопоры, а на посадочной площадке установлены упоры, ограничивающие удлинение упругих элементов;
- упругий элемент выполнен в виде цилиндра с заглушенными торцами, в которых выполнены отверстия для выхода штока, внутри установлены пружины сжатия и поршни со штоками, с которыми соединен шнур;
- в качестве гибкого материала использована роликовая цепь одностороннего изгиба.
Технический результат достигается тем, что в устройстве позиционирования БПЛА вертикального взлета и посадки, содержащая установленные над посадочной площадкой толкатели и механизм движения толкателей, толкатели выполнены из гибкого упругого материала;
- на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, на которые натянут гибкий толкатель в виде замкнутого шнура из гибкого упругого материала, по крайней мере на части промежутках между шкивами к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги;
- на посадочной площадке установлены две повернутые друг относительно друга группы шкивов, в каждой из которых шкивы расположены подобно расположению опор БПЛА, между парами шкивов, которые определяют длинные стороны образованного точками расположения шкивов многогранника натянуты гибкие толкатели, выполненные в виде замкнутых шнуров из гибкого упругого материала, к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги;
- на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, на которые натянут гибкий толкатель, выполненный в виде замкнутого шнура из гибкого упругого материала, по крайней мере на части промежутках между шкивами установлены подвижные шкивы, которые толкают шнур центру;
- шнуры из гибкого упругого материала имеют ограничение по растяжимости.
Сущность изобретения поясняется следующим графическим материалом.
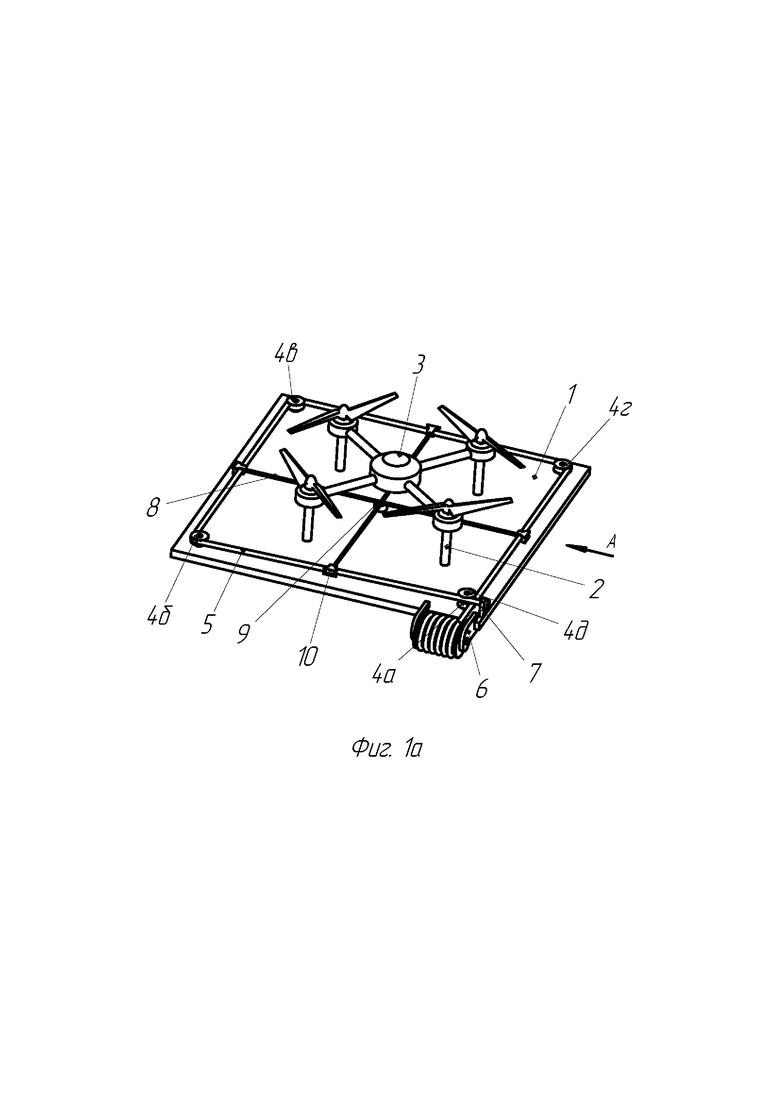
На фиг. 1а изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем.
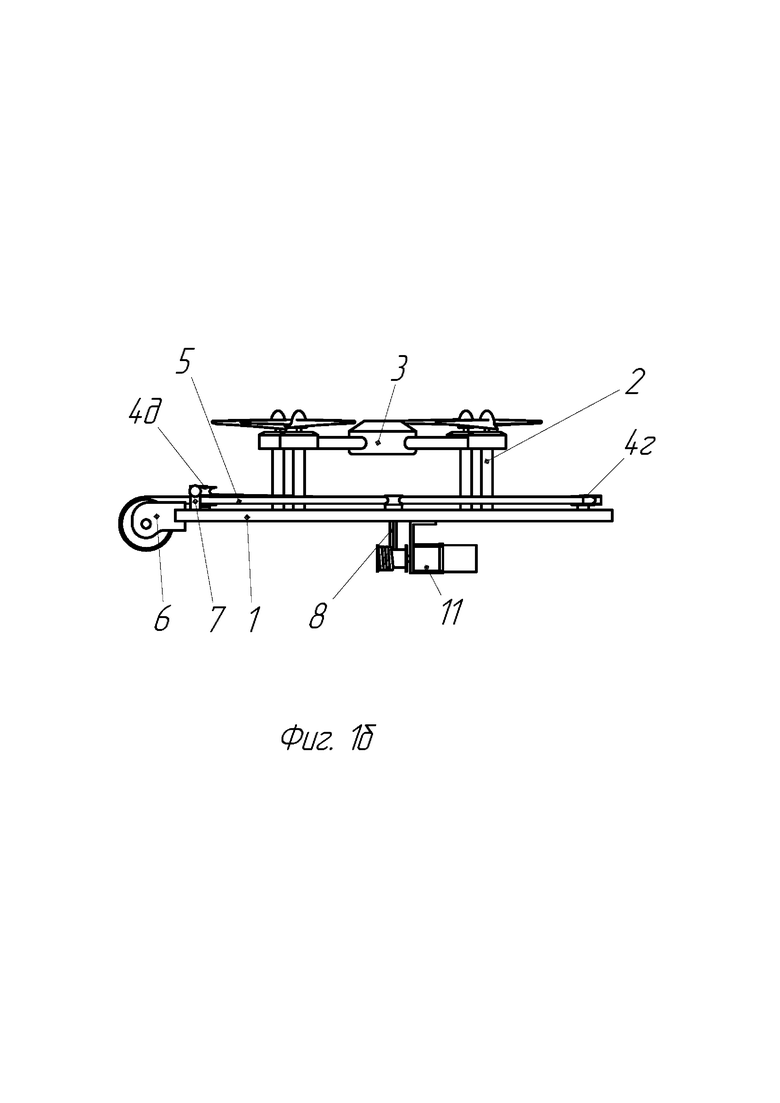
На фиг. 1б изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вид по стрелке А фиг. 1а.
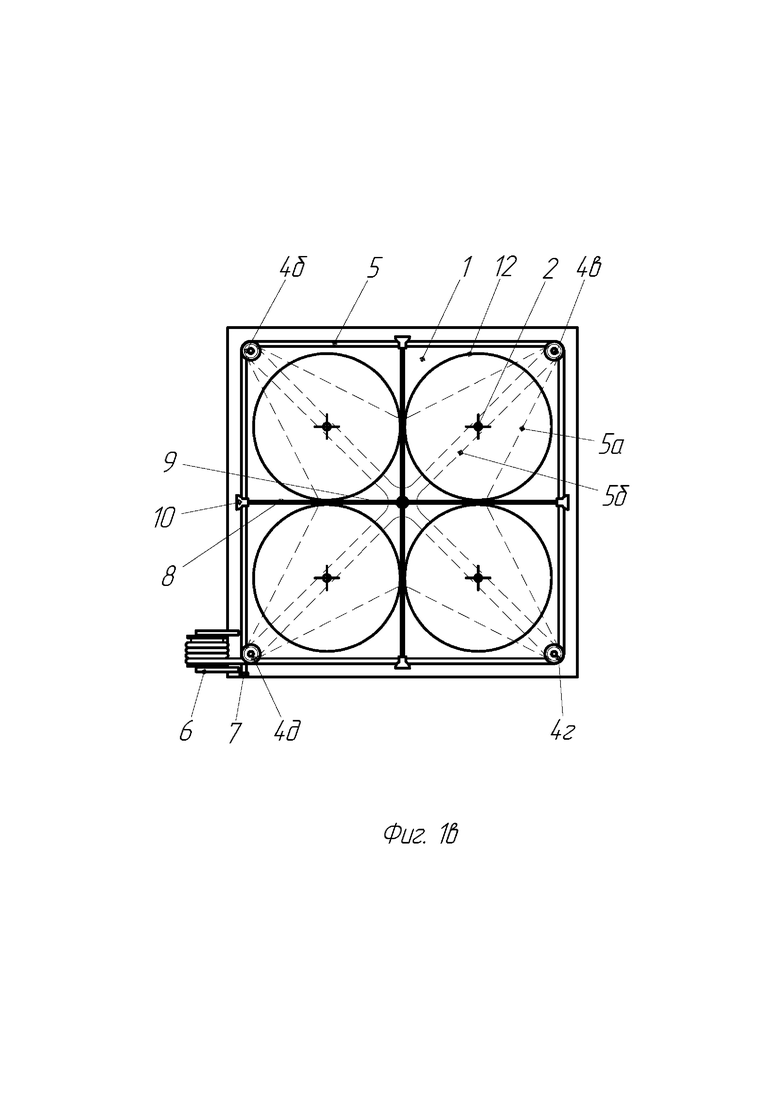
На фиг. 1в представлен вариант определения мест расположения шкивов.
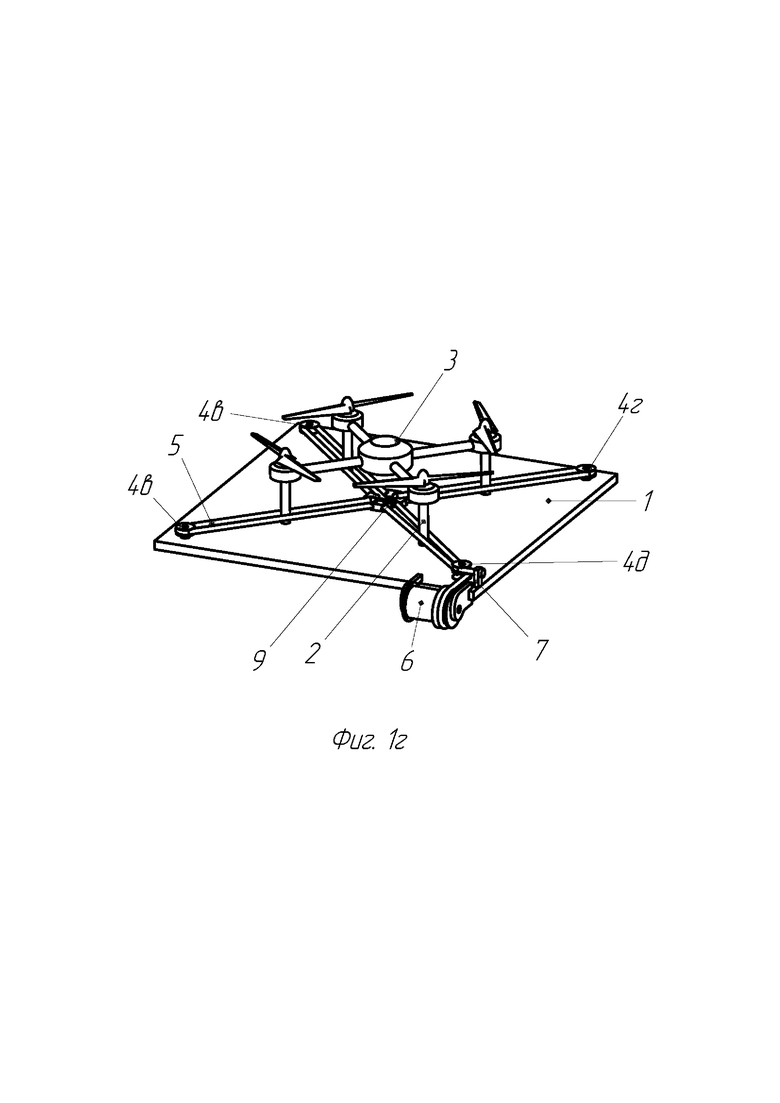
На фиг. 1г изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем с позиционированным БПЛА.
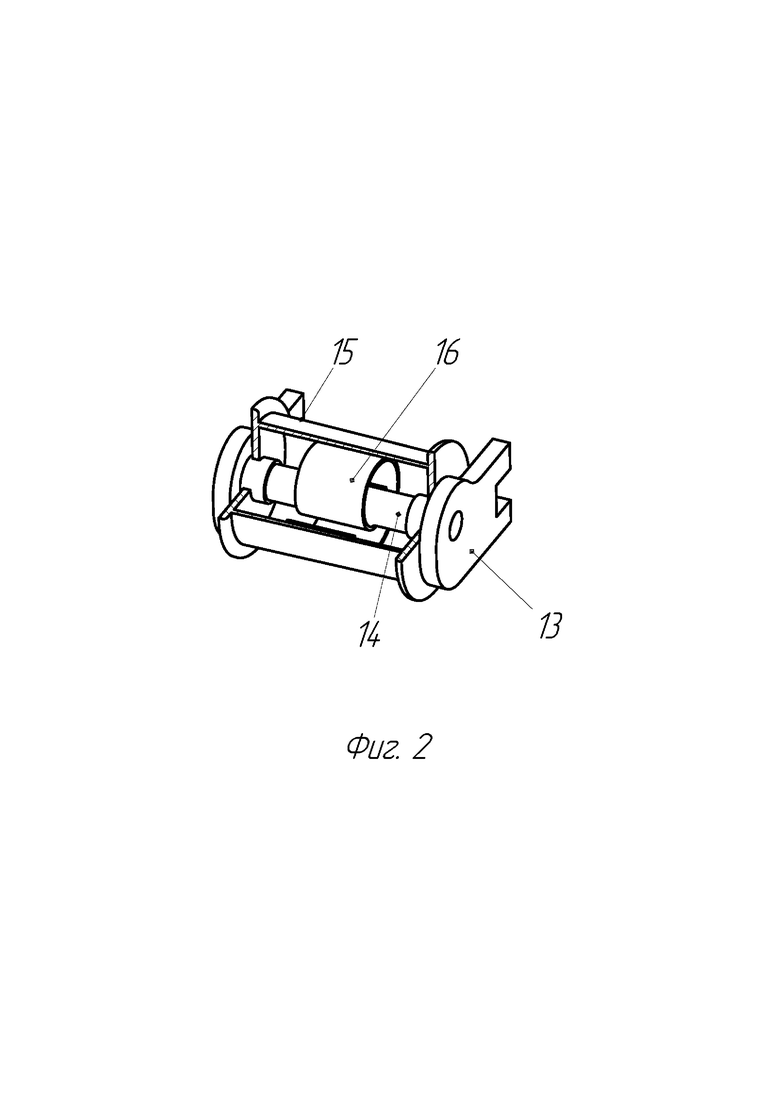
На фиг. 2 изображен упругий элемент, выполненный в виде пружинного барабана, на который наматывается шнур.
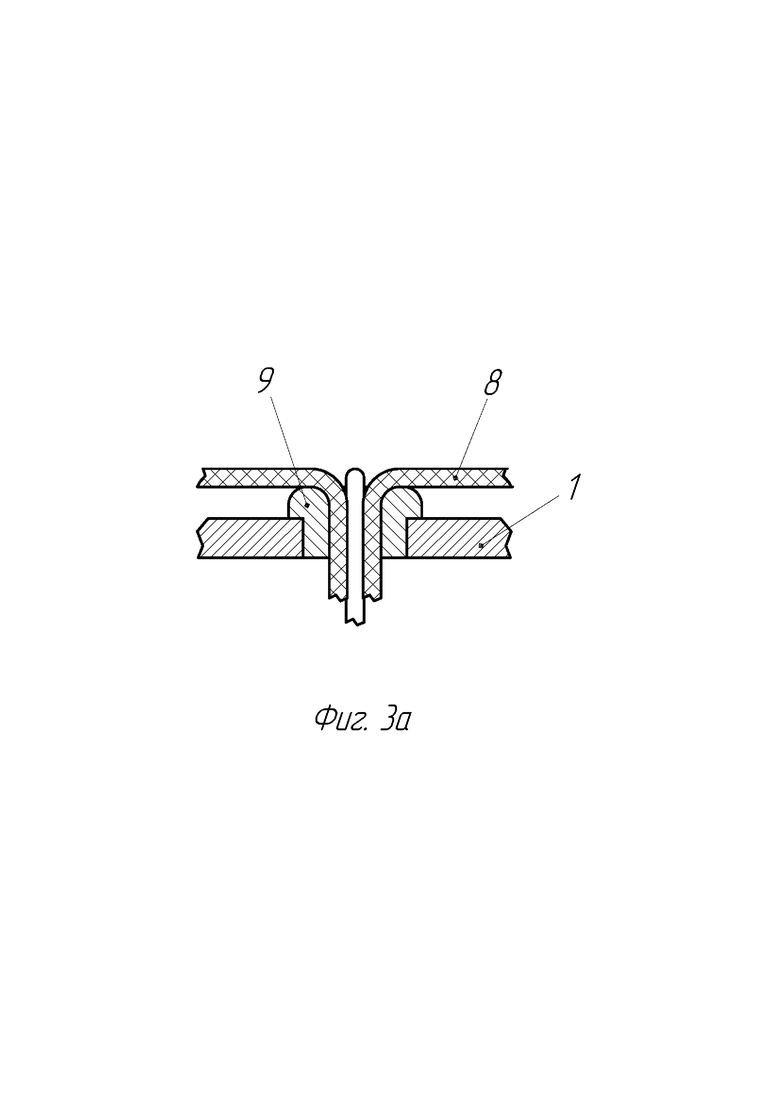
На фиг. 3а изображен полюс в виде фильеры.
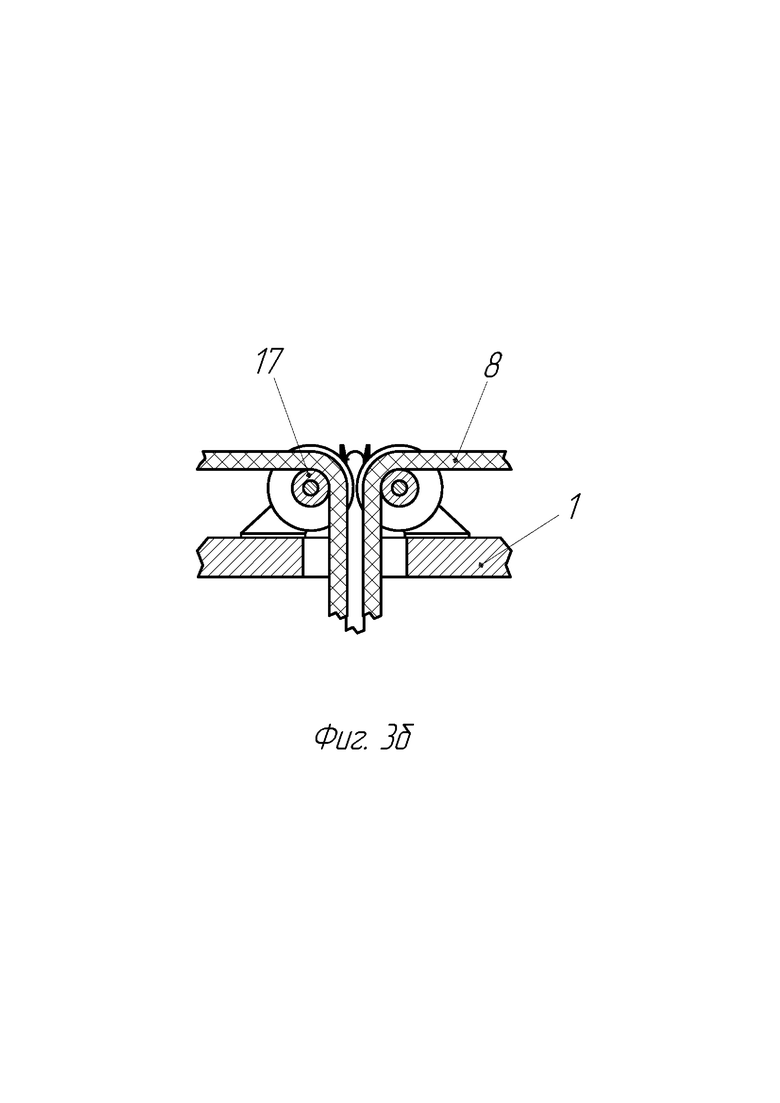
На фиг. 3б изображен полюс в виде неподвижных блоков (шкивов).
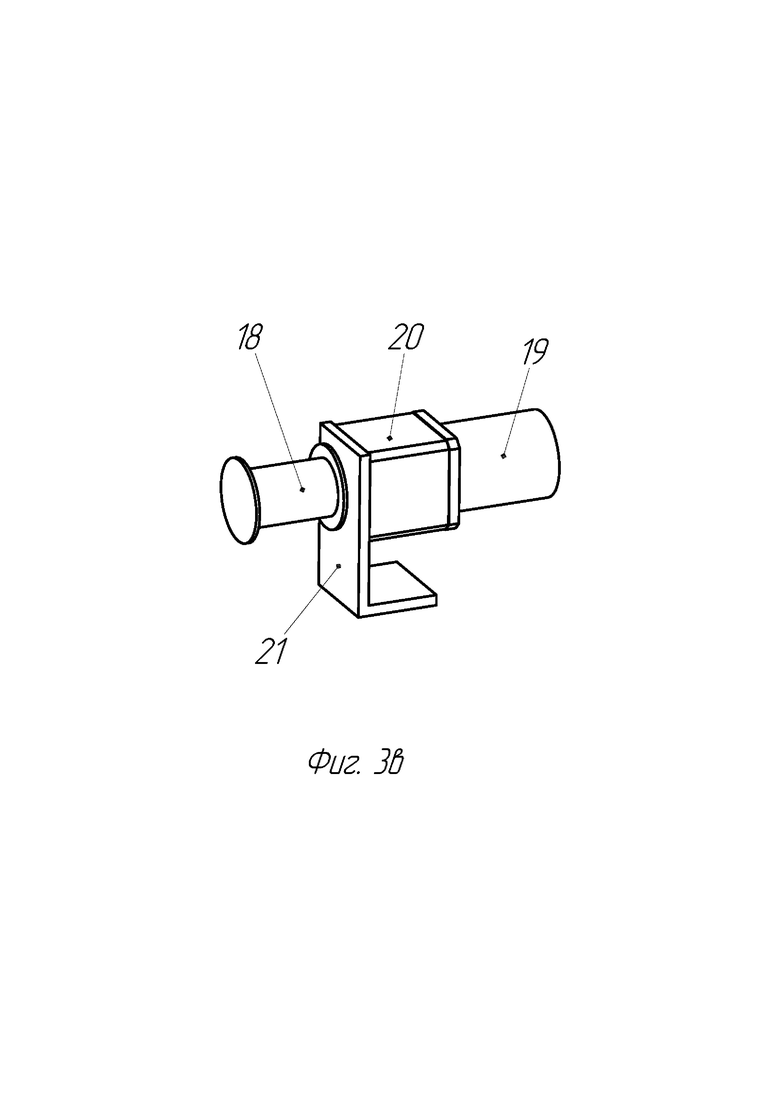
На фиг. 3в изображено устройство вытягивания тяги.
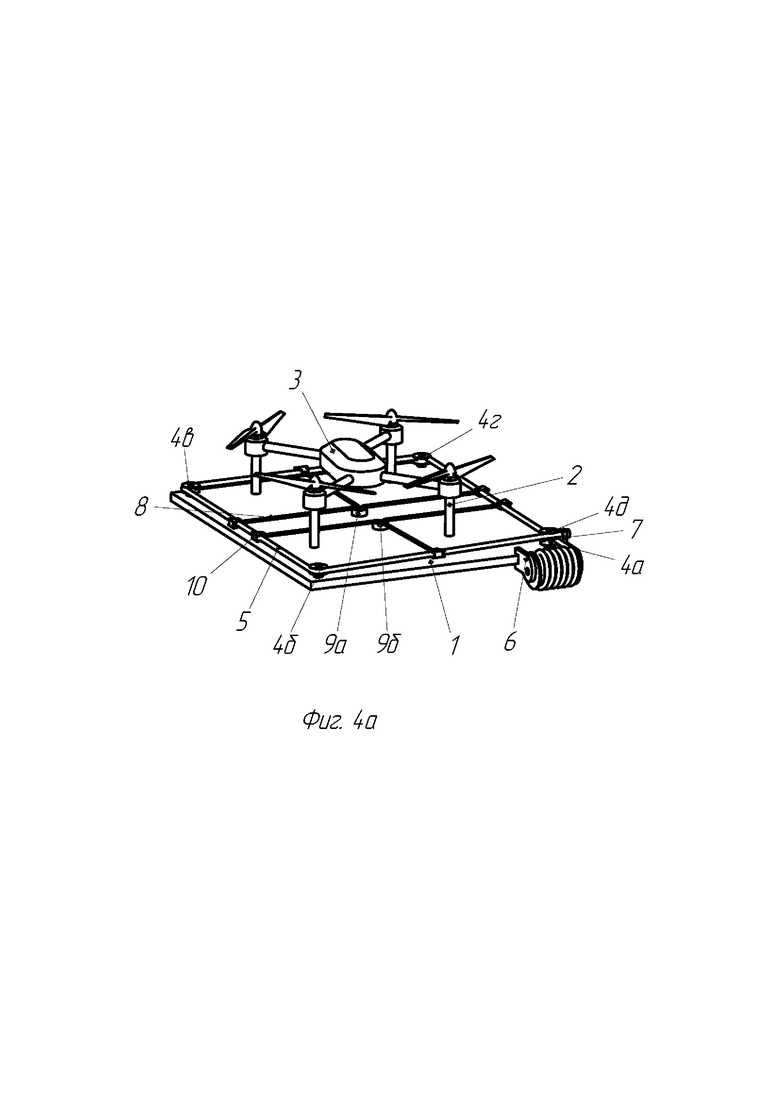
На фиг. 4а изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем с двумя полюсами.
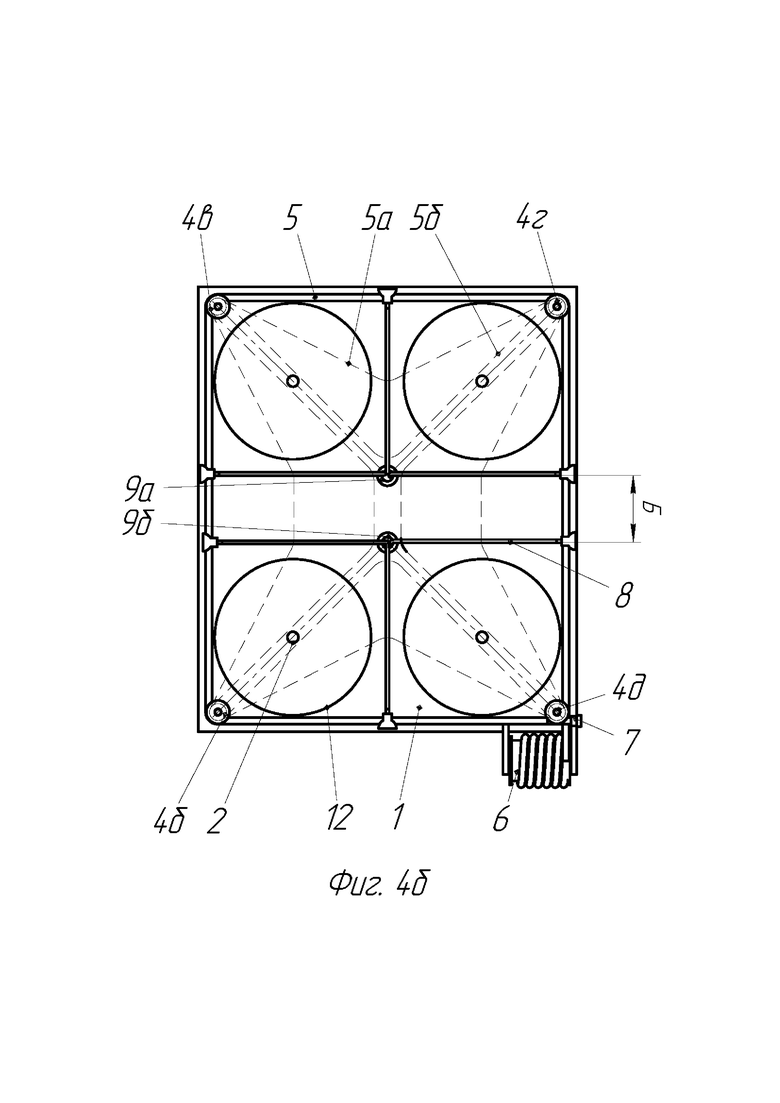
На фиг. 4б изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем с двумя полюсами вид сверху без БПЛА.
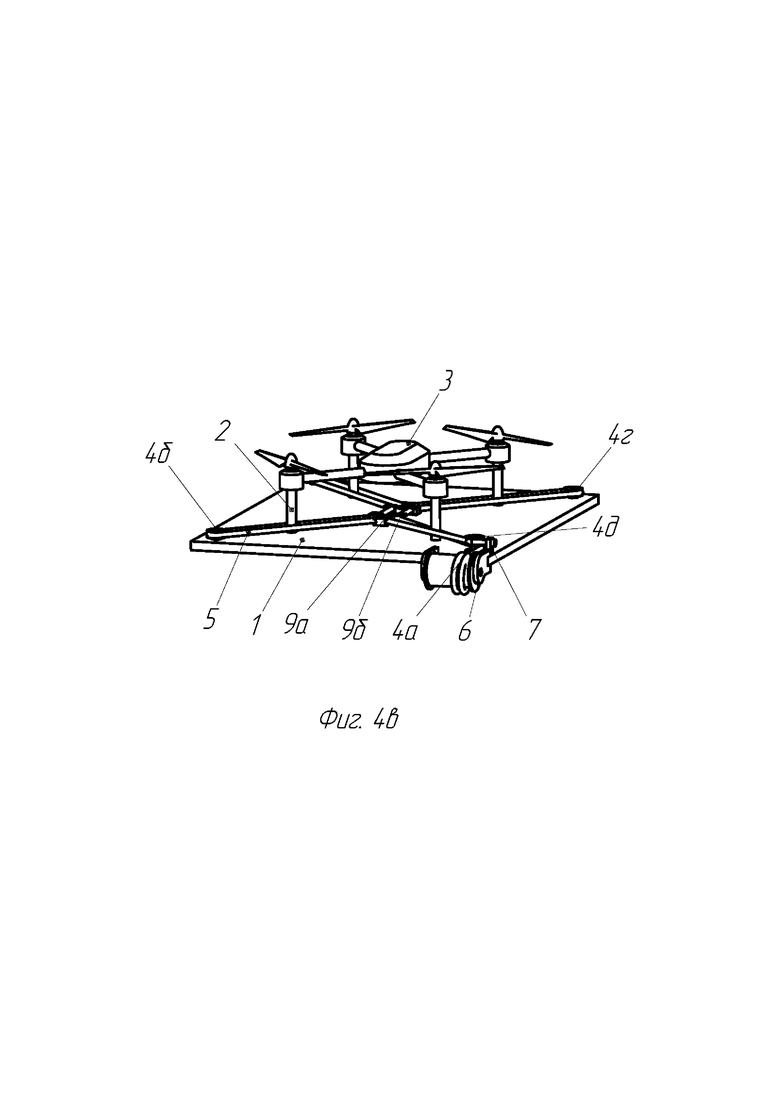
На фиг. 4в изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем с двумя полюсами после позиционирования БПЛА.
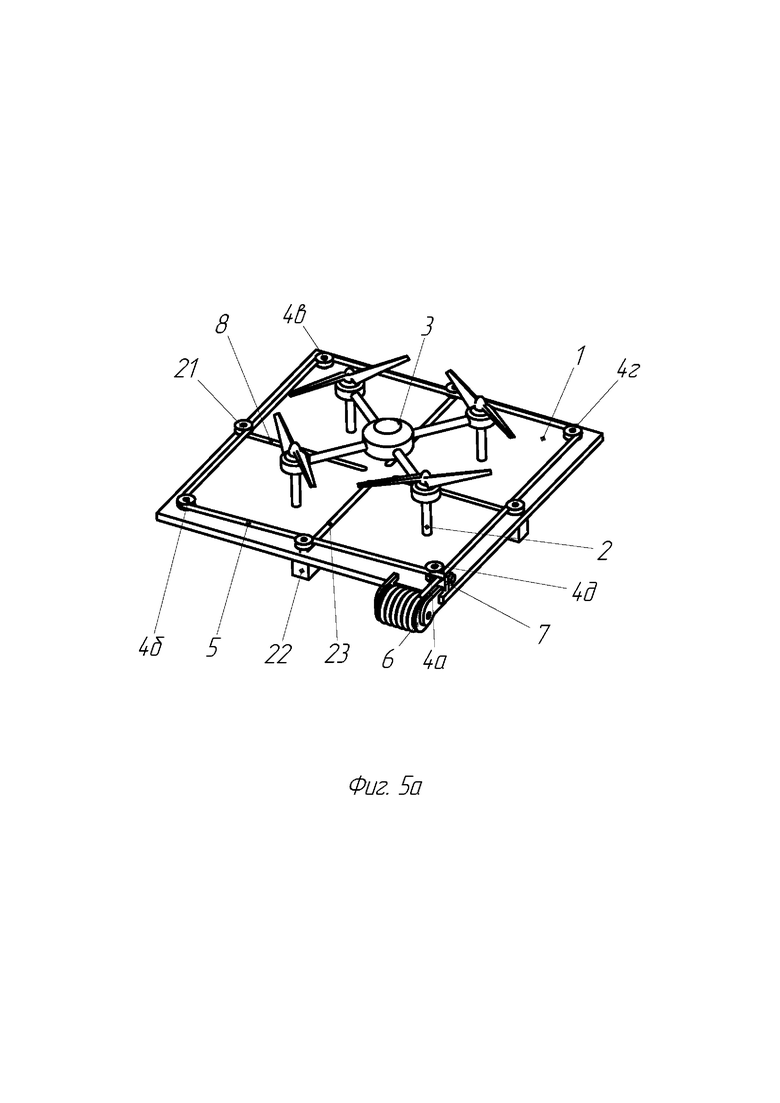
На фиг. 5а изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура и дополнительными подвижными шкивам для вытягивания шнура центру.
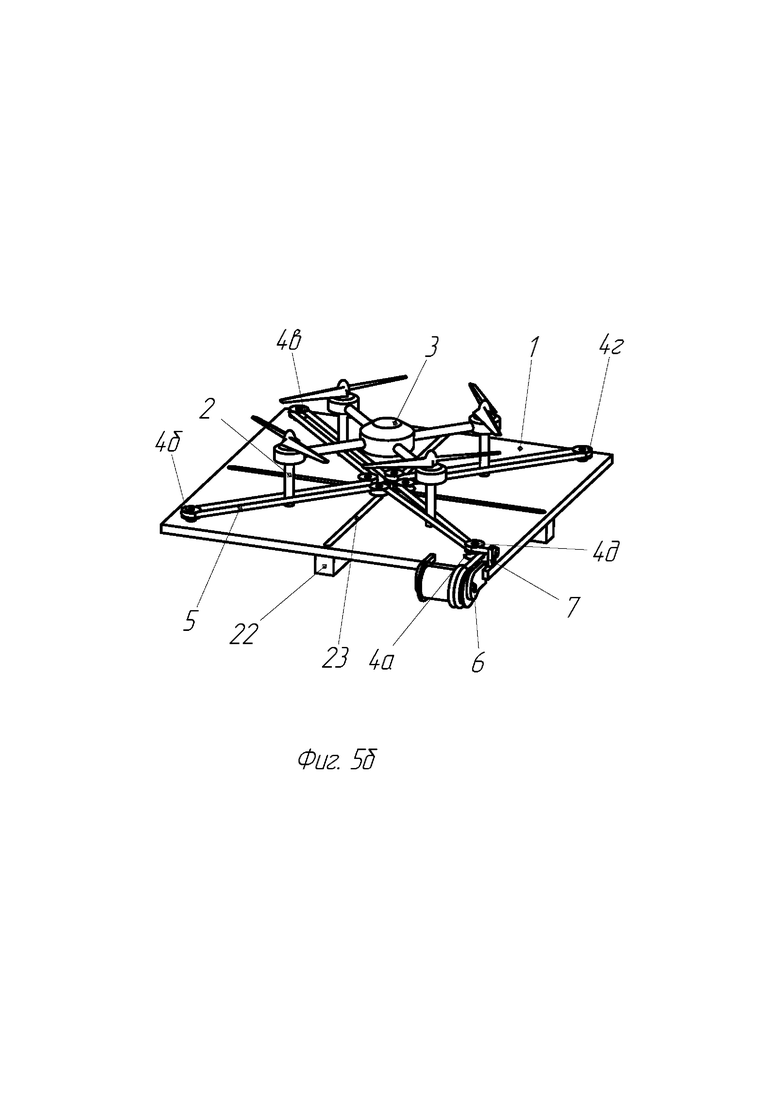
На фиг. 5б изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура и дополнительными подвижными шкивам для вытягивания шнура центру после позиционирования БПЛА.
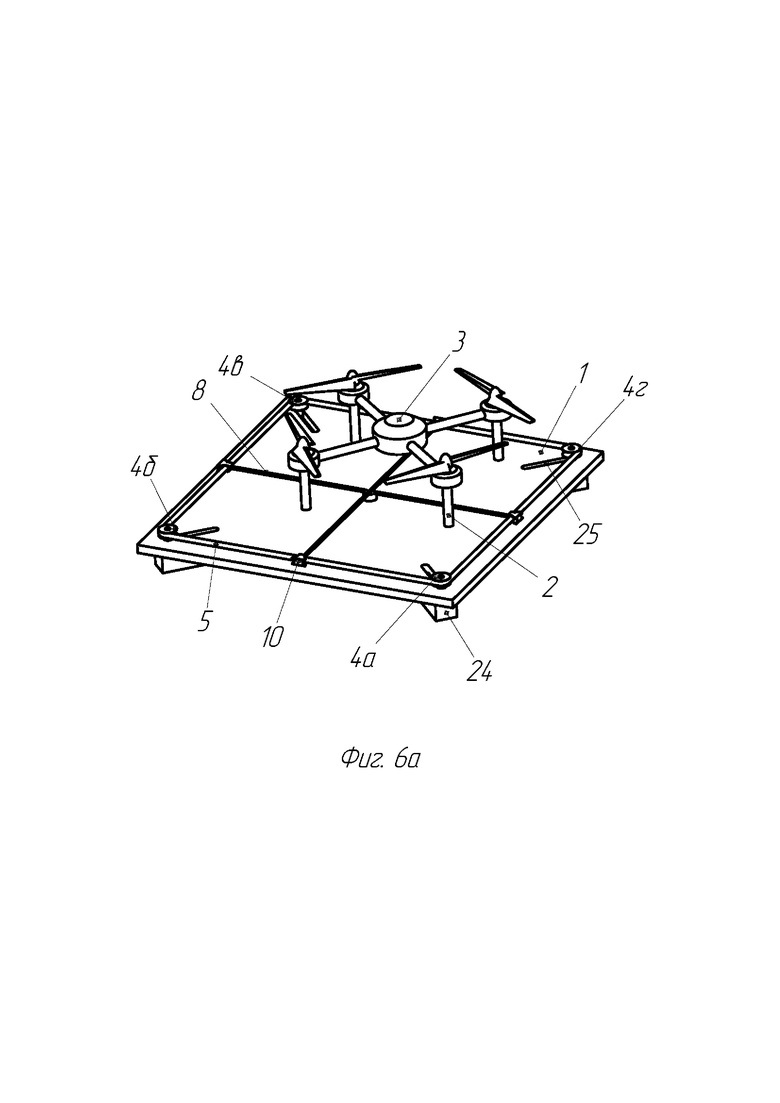
На фиг. 6а изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура, в котором шкивы установлены с возможностью упругого линейного перемещения.
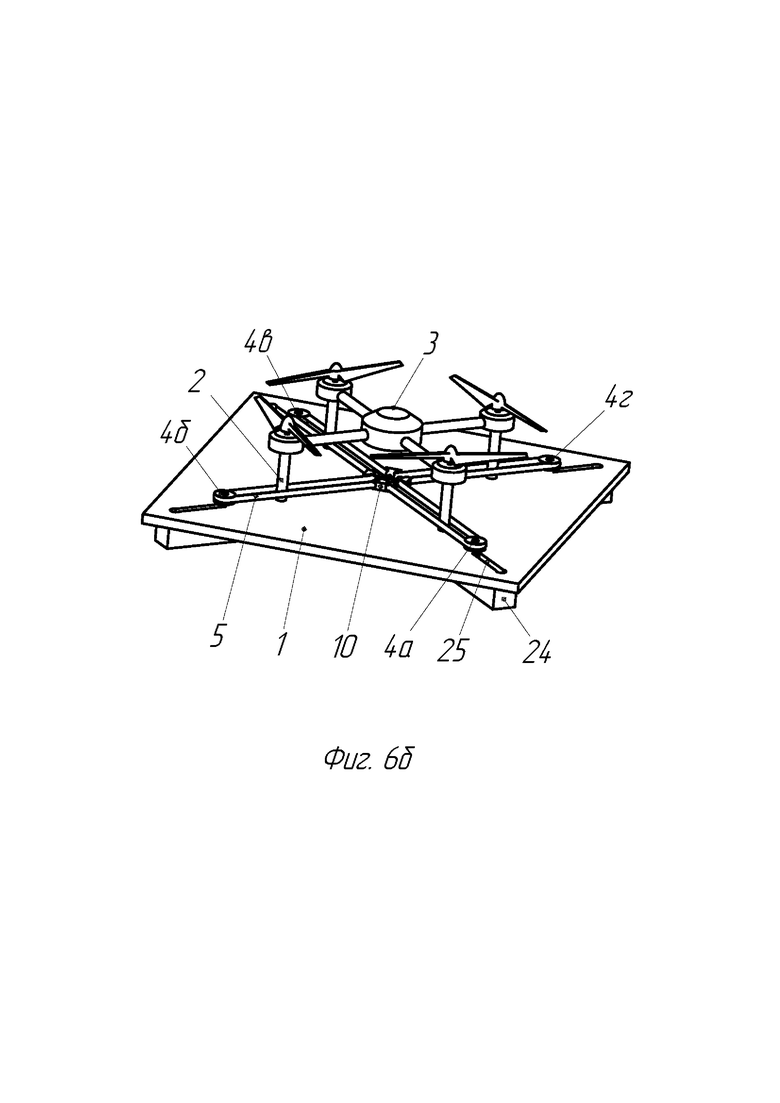
На фиг. 6б изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура, в котором шкивы установлены с возможностью упругого линейного перемещения после позиционирования БПЛА.
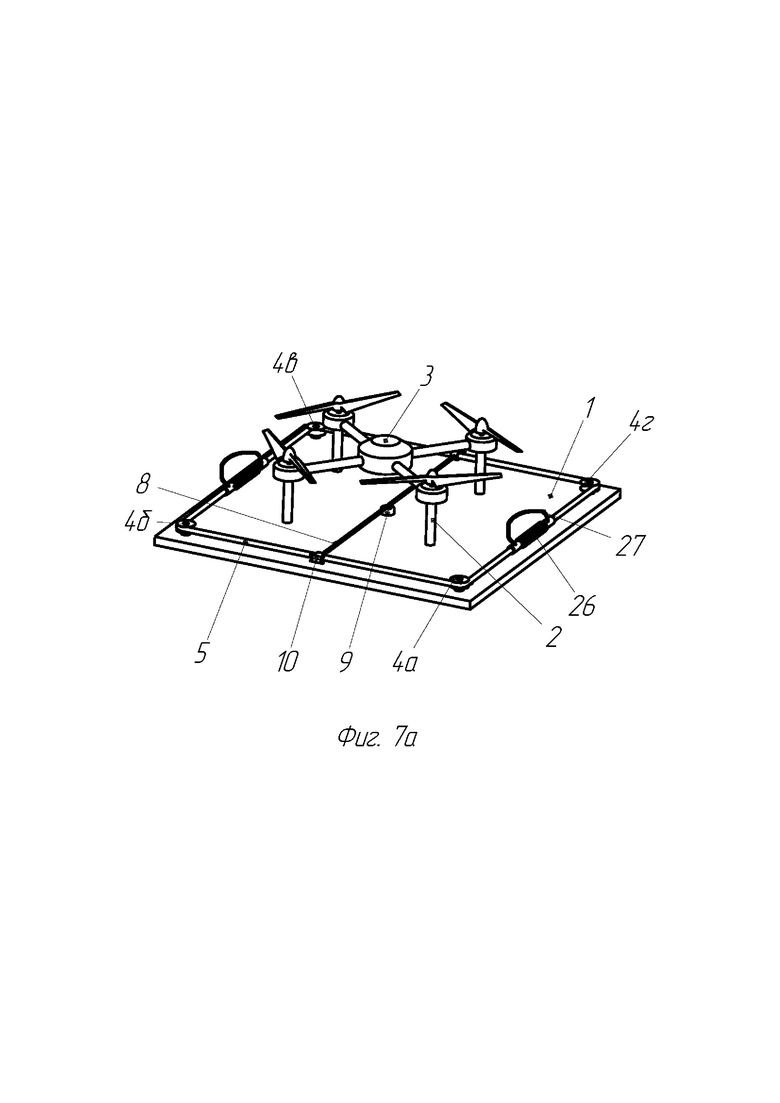
На фиг. 7а изображено устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура, в котором между шкивами чередуется упругий элемент и шнур.
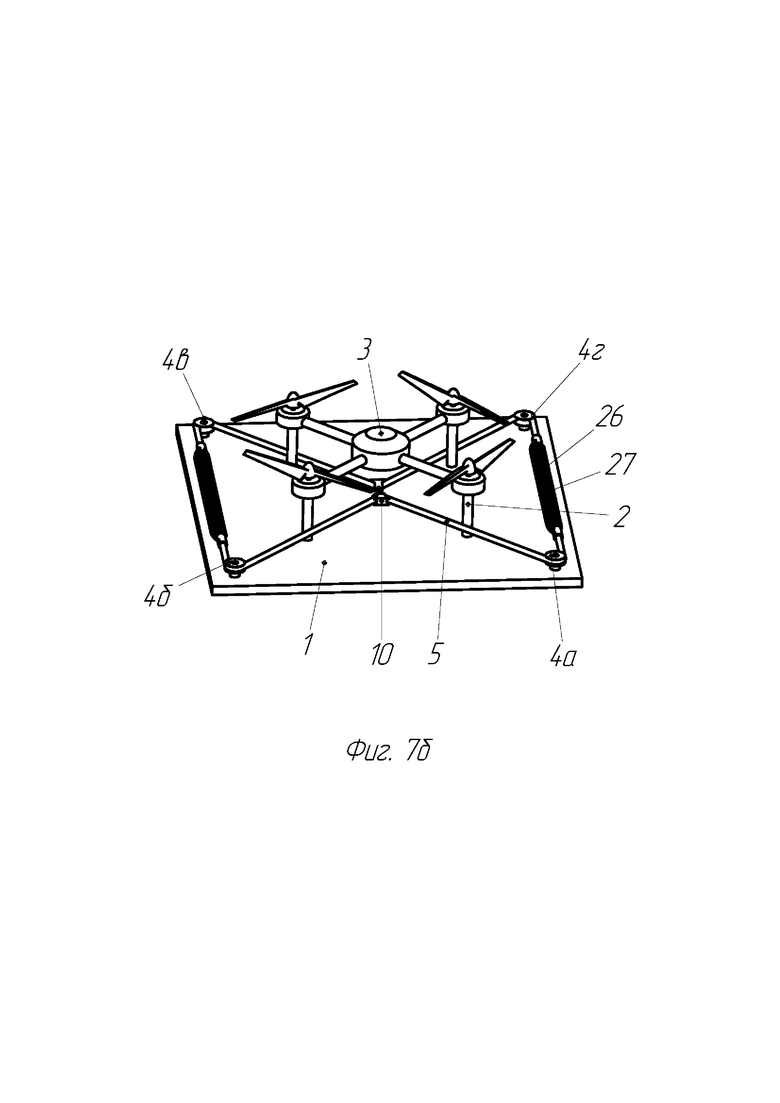
На фиг. 7б изображено устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура, в котором между шкивами чередуется упругий элемент и шнур после позиционирования БПЛА.
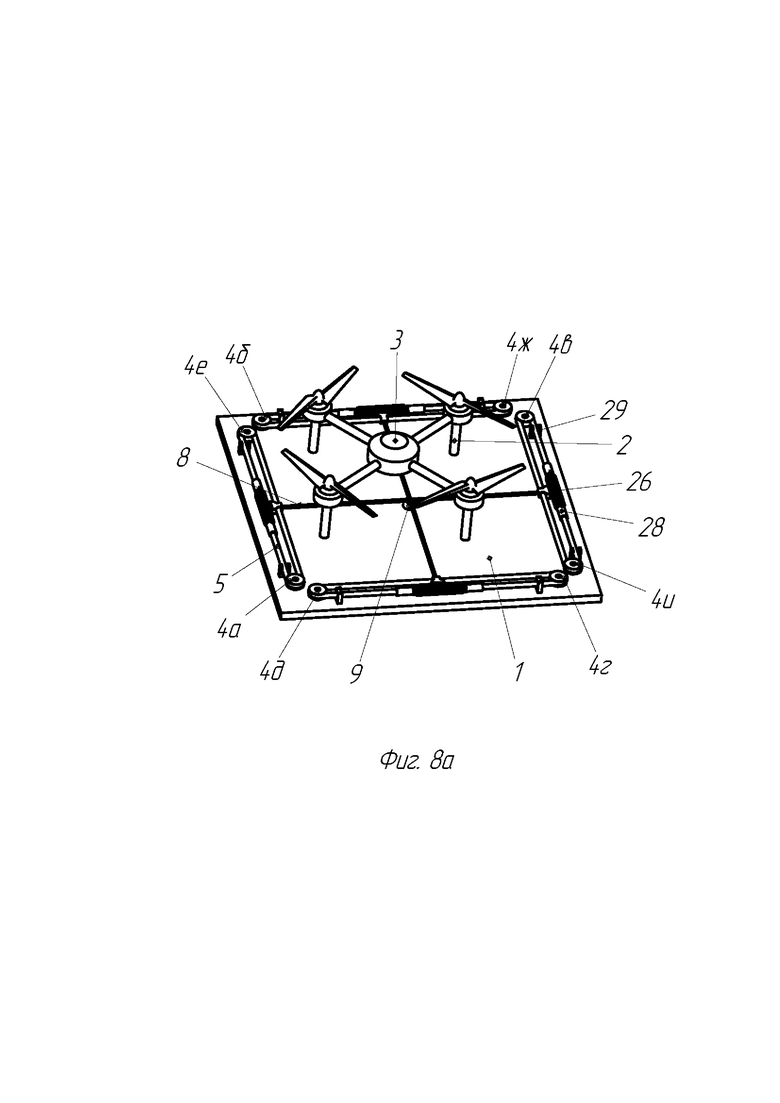
На фиг. 8а изображено устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура, в котором между шкивами, определяющими длинные стороны многогранника, натянуты гибкие толкатели в виде шнура, которые с наружной стороны замкнуты с помощью упругих элементов
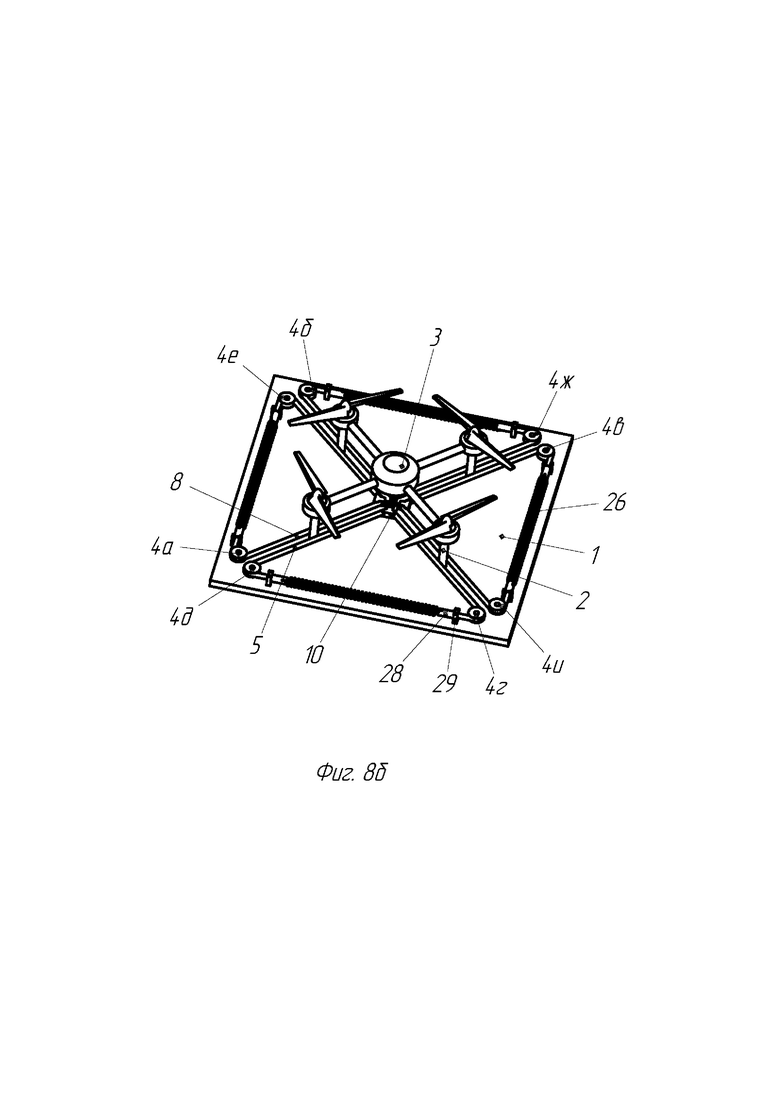
На фиг. 8б изображено устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура, в котором между шкивами, определяющими длинные стороны многогранника, натянуты гибкие толкатели в виде шнура, которые с наружной стороны замкнуты с помощью упругих элементов после позиционирования БПЛА.
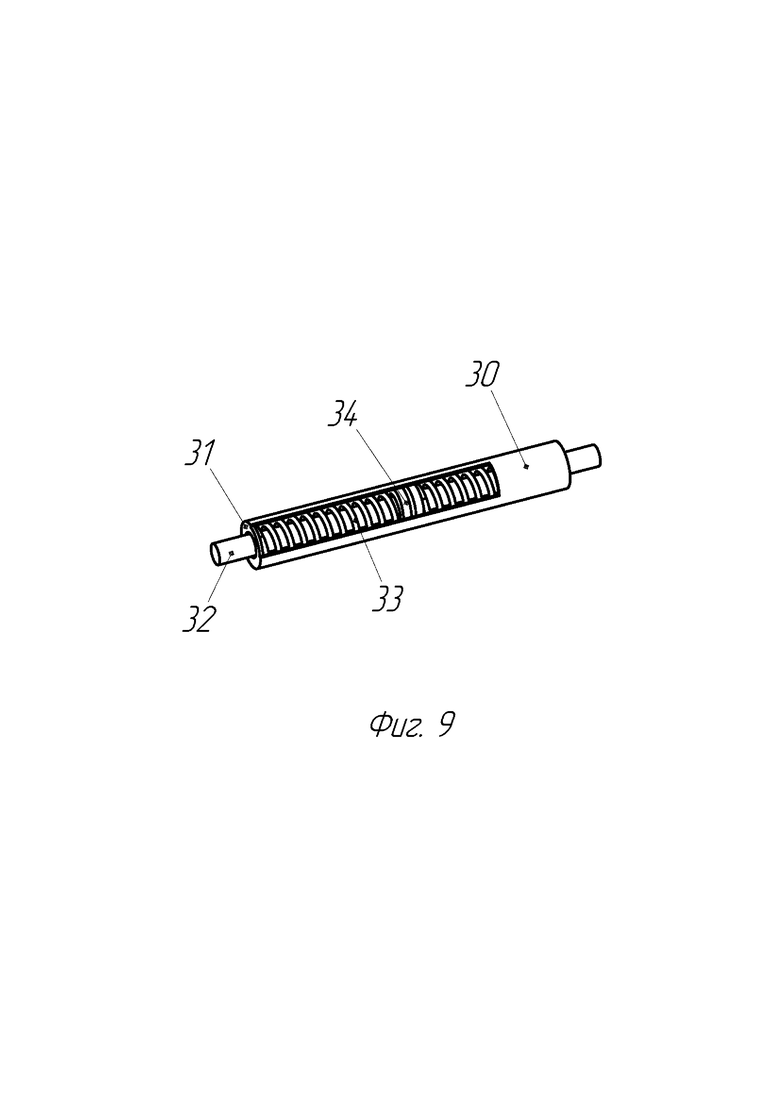
На фиг. 9 изображен упругий элемент с ограничителем длины.
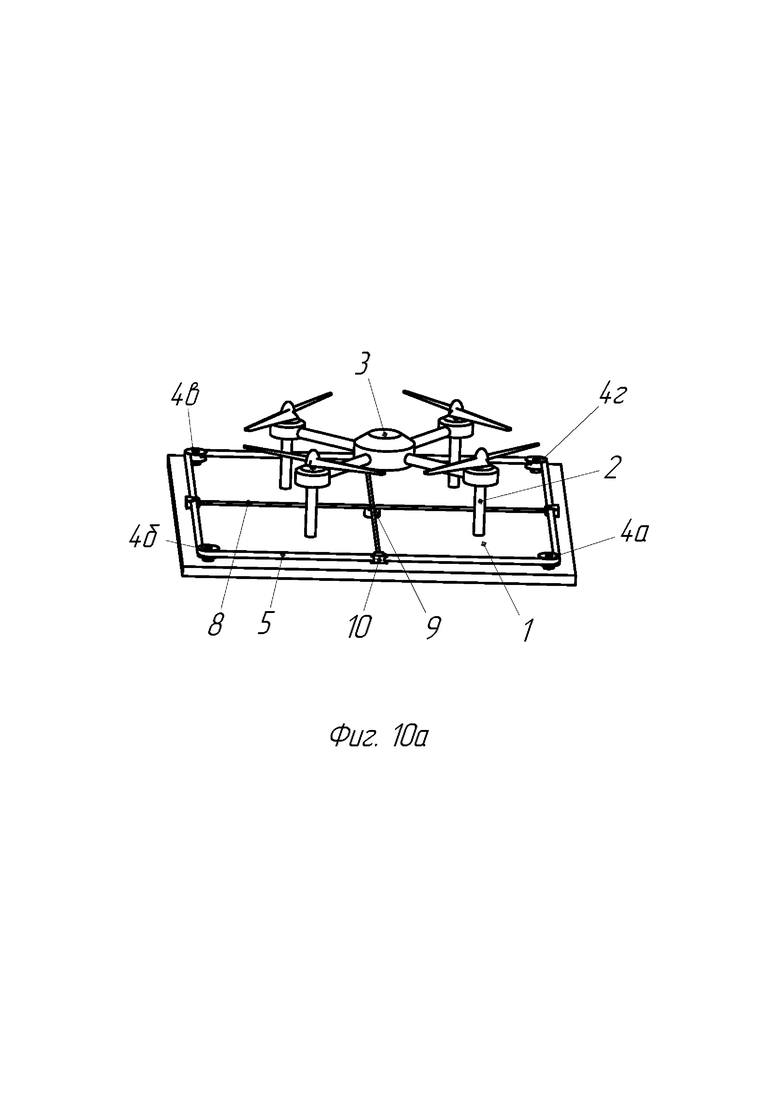
На фиг. 10а изображено устройство позиционирования БПЛА вертикального взлета и посадки, с гибким толкателем из гибкого упругого материала.
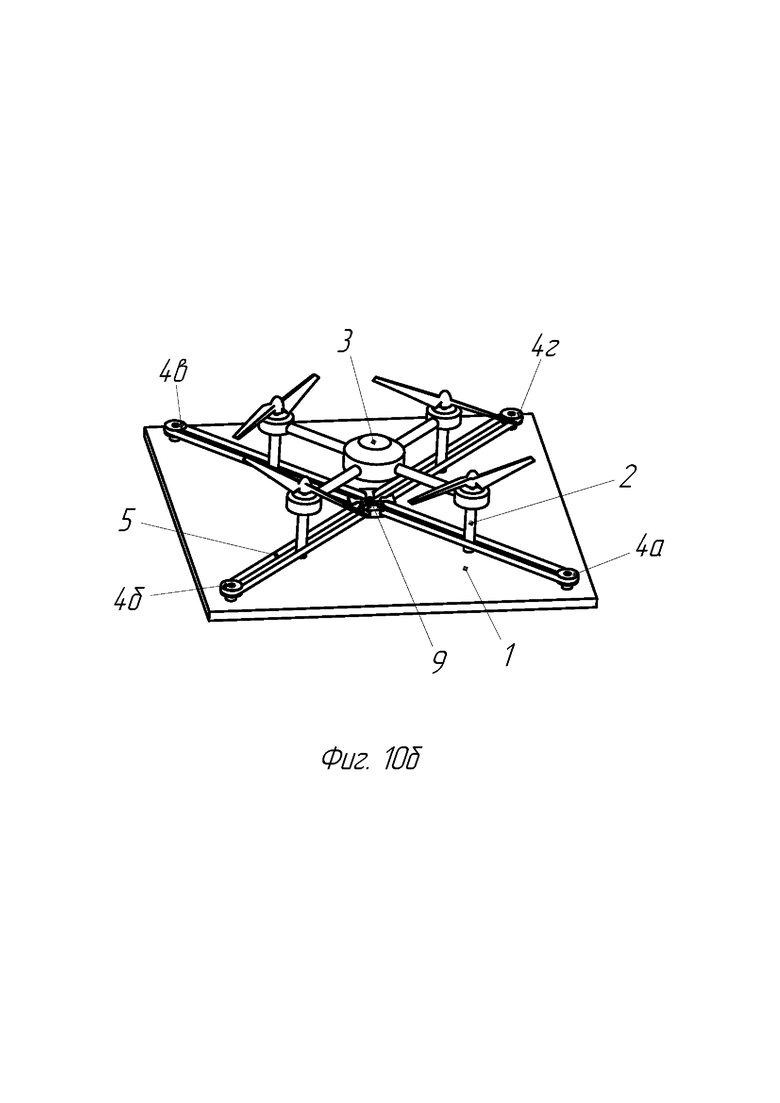
На фиг. 10б изображено устройство позиционирования БПЛА вертикального взлета и посадки, с гибким толкателем из гибкого упругого материала после позиционирования БПЛА.
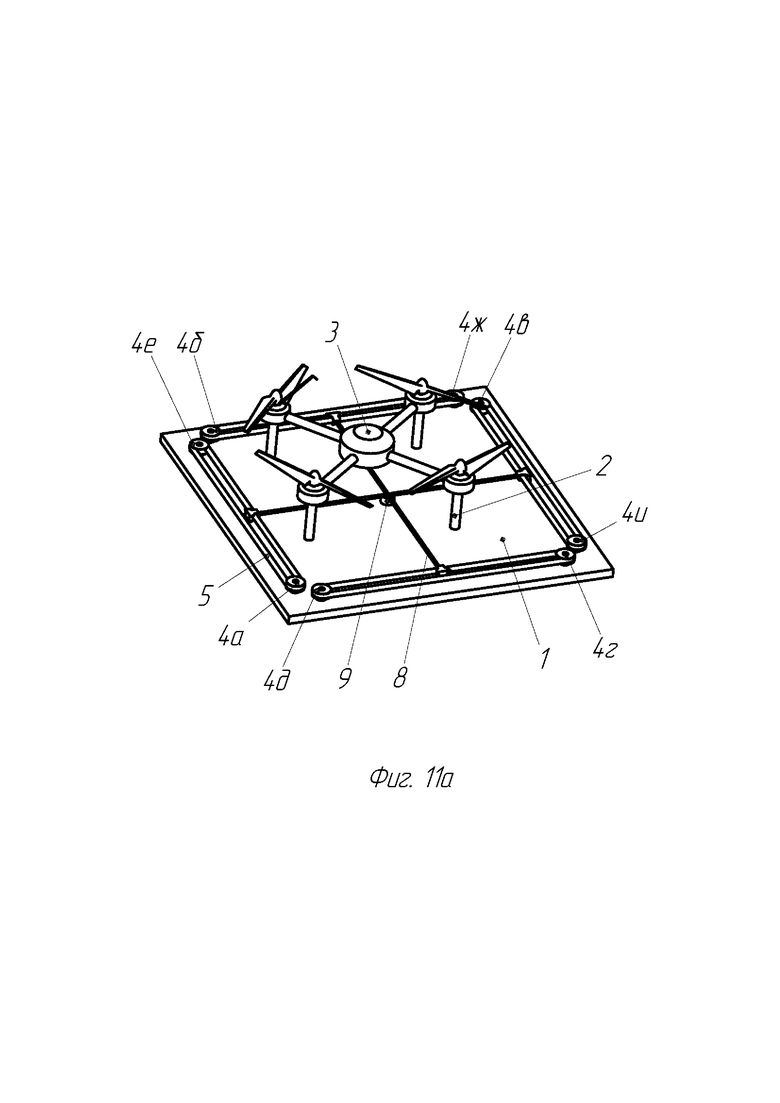
На фиг. 11а изображено устройство позиционирования БПЛА вертикального взлета и посадки с гибким упругим толкателем, в котором между шкивами, определяющими длинные стороны многогранника, натянуты гибкие упругие толкатели.
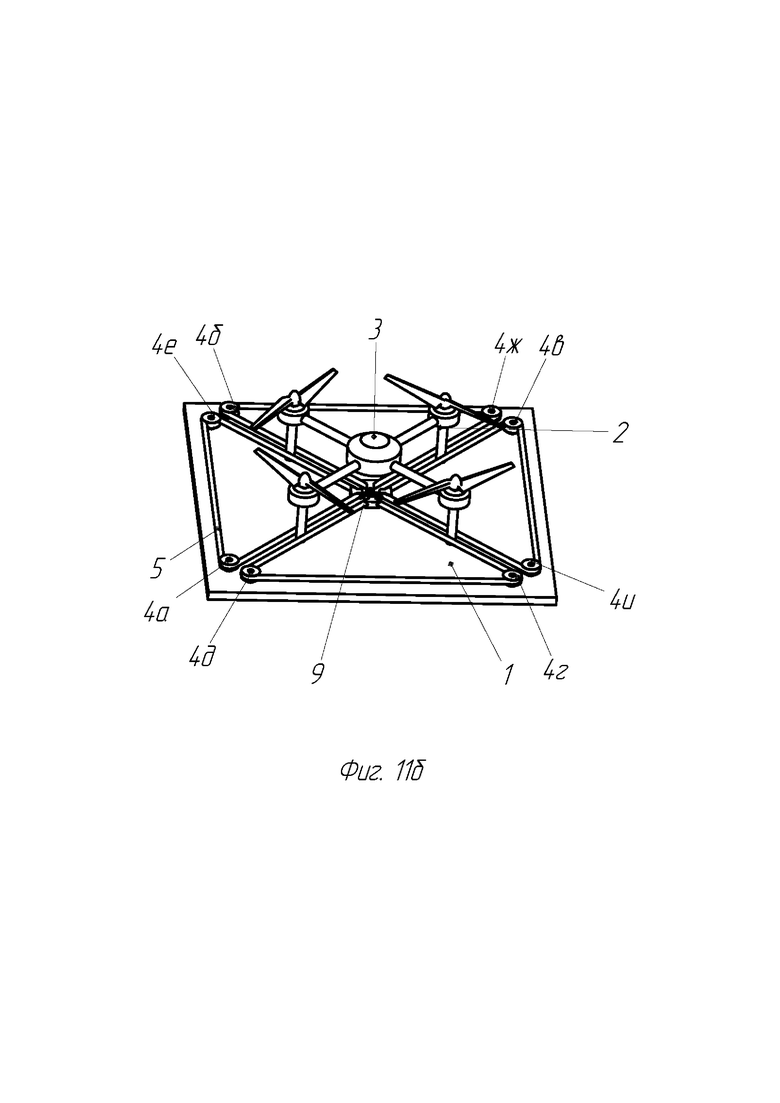
На фиг. 11б изображено устройство позиционирования БПЛА вертикального взлета и посадки с гибким упругим толкателем, в котором между шкивами, определяющими длинные стороны многогранника, натянуты гибкие упругие толкатели после позиционирования БПЛА.
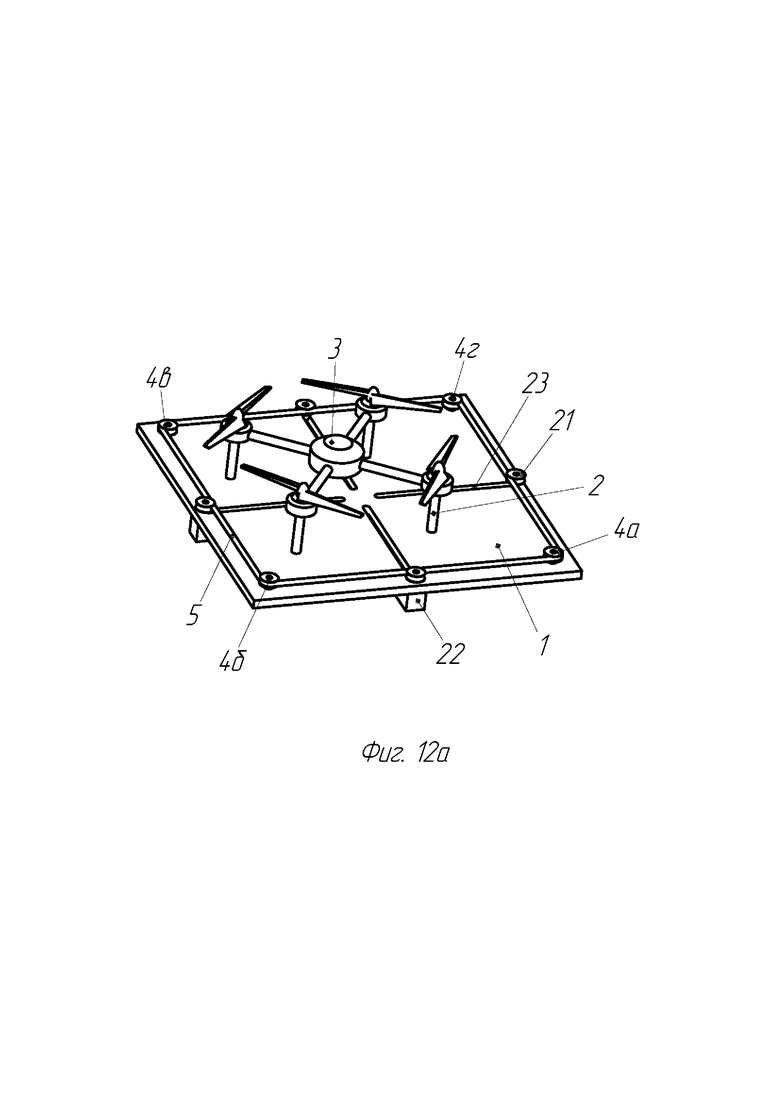
На фиг. 12а изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким упругим толкателем и дополнительными подвижными шкивами.
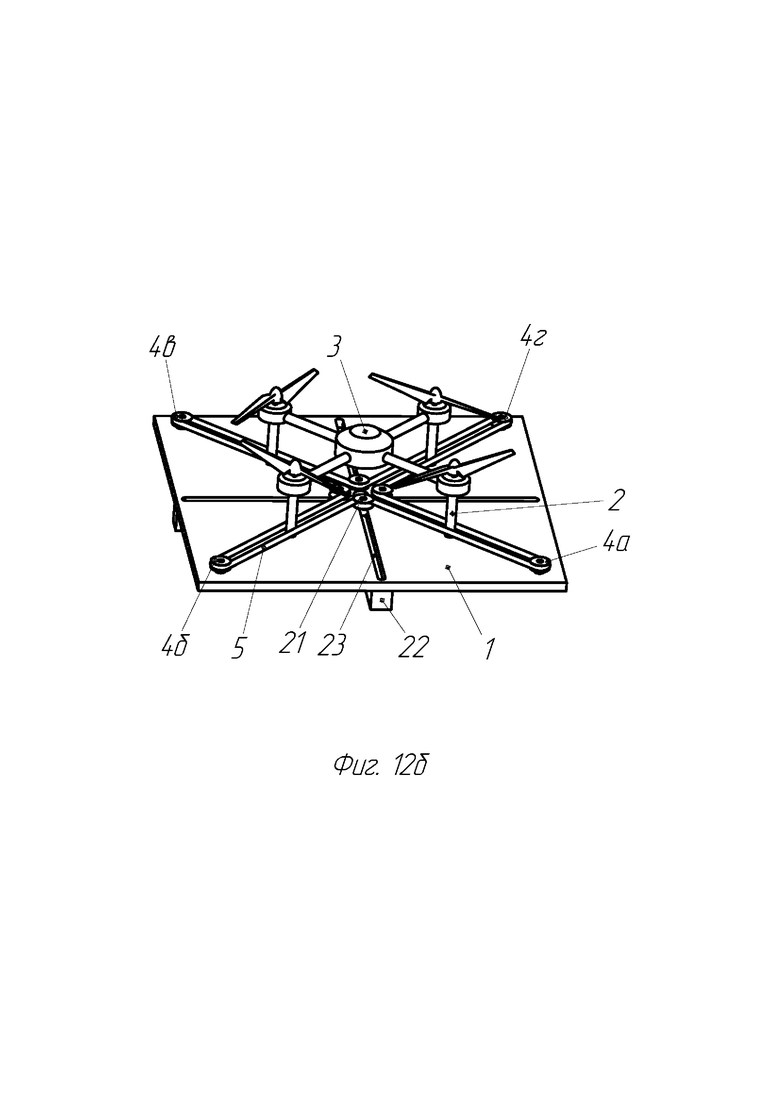
На фиг. 12б изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким упругим толкателем и дополнительными подвижными шкивами после позиционирования БПЛА.
На фиг. 12б изображен вариант исполнения гибкого упруго шнура ограниченного растяжения.
Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем в виде шнура вариант исполнения фиг. 1а, 1б, 1в, 1г содержит установленные на посадочной площадке 1, расположенные подобно расположению опор 2 БПЛА 3 шкивы 4а, 4б, 4в и 4г и дополнительный шкив 4д, который расположен над шкивом 4а. Шкивы от 4а до 4д охватывает гибкий толкатель, выполненный в виде шнура 5, по меньшей мере один конец которого соединены с упругим элементом 6, который на указанных фигурах представлен в виде пружинного барабана, другой конец шнура 5 закреплен на стойку 7. Конец шнура 5, который идет к упругому элементу 6, проходит через шкив 4а, другой конец соединен со стойкой 7 пройдя шкив 4д. В промежутках между шкивами 4а, 4б, 4в, 4г и 4д к шнуру 5 присоединены тяги 8, которые сходятся по меньшей мере в одном полюсе 9, где разворачиваются под посадочную площадку 1 и соединяются по менышей мере с одним устройством 11 (фиг. 1б) вытягивания тяг 8. В зависимости от веса БПЛА тяги 8 в могут быть соединены со шнуром 5 с помощью коуша 10 или подвижного блока (не показано).
Шкивы 4 установлены таким образом, что они расположены подобно расположению опор 2 БПЛА 3 в позиционированном состоянии. Размер фигуры, образуемой охватываемым гибким толкателем, выполненным в виде шнура 5 должен быть достаточным для приземления внутри него опор 2 БПЛА 3 с учетом неточности приземления БПЛА 3. На фиг. 1в изображена посадочная площадка 1 и опоры 2 БПЛА 3 в позиционированном состоянии, вокруг которых начерчены круги 12, которые показывают возможный разброс расположения опор 2 при приземлении БПЛА 3. Шнур 5 охватывает круги 12, что показывает, что приземление опор 2 БПЛА 3 будет внутри фигуры, образуемой шнуром 5. Позицией 5а обозначена линия расположения шнура 5 в промежуточном положении в процессе позиционирования, позицией 5б после позиционирования БПЛА 3. На фиг. 1г изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем с позиционированным БПЛА 3.
Гибкий толкатель, выполненный в виде шнура 5, представляет собой гибкий нерастяжимый материал, например шнур, трос, канат и т.п. В качестве шнура 5 может быть использована также роликовая цепь двустороннего или одностороннего изгиба. В этом случае шкивы 4 могут быть заменены на звездочки цепной передачи.
Упругий элемент 6 вариант исполнения фиг. 2 содержит установленные на кронштейны 13 без возможности вращения ось 14, на который с возможностью вращения установлен барабан 15. Ось 14 и барабан 15 соединены между собой плоской спиральной пружиной 16 или винтовой пружиной кручения (не показано). Усилие натяжения, создаваемое упругим элементом 6 должно натягивать шнур 5 таким образом, чтобы вследствие провисания под собственным весом он не касаться посадочной площадки 1.
В зависимости от веса БПЛА полюс 9 может быть выполнен в виде фильеры (поз.9 на фиг. 3а) или установленных на посадочную площадку 1 шкивов 17 (неподвижные блоки) (фиг. 3б).
Устройство 11 вытягивания тяги 8 вариант исполнения фиг. 3в представляет собой лебедку, на барабан 18 которого наматывается один или все тяги 8 и состоит из мотора 19 с тормозом (не показан) или без, редуктора 20 на вал которого установлен намоточный барабан 18. Редуктор 20 может быть самотормозящим, например, червячным. Лебедка устанавливается на посадочную площадку 1 на кронштейн 21. В устройстве может быть использовано одно устройство 11 вытягивания для всех тяг 8, так и отдельный для каждой тяги 8 или группы тяг 8.
На фиг. 4а, 4б, 4в изображен вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем с двумя полюсами 9а и 9б, которые разнесены на расстояние Б (фиг. 4б). Устройство предназначено для БПЛА 3 с продолговатым корпусом и расположение опор 2 по вершинам прямоугольника. При этом устройство может содержать два устройства 11 вытягивания тяги 8, которые расположены около каждого полюса 9а и 9б или тяги 8 могут быть собраны в единый пучок от двух полюсов 9а и 9б, и поступить на единое устройство 11 вытягивания тяги 8. Зоны приземления опор 2 БПЛА 3 (фиг 4б) представляют собой квадраты (прямоугольники), расположенные по углам периметра расположения шнура, круги 12, которые показывают возможный разброс расположения опор 2 при приземлении БПЛА 3 находится в квадрате, определяемом периметром расположения шнура 5 и тяг 8. Позицией 5а обозначена линия расположения шнура 5 в промежуточном положении в процессе позиционирования, позицией 5б после позиционирования БПЛА 3.
Вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 5а, 5б содержит установленные на посадочной площадке 1 шкивы 4, которые расположены подобно расположению опор 2 БПЛА 3, шкивы 4 охватывает гибкий толкатель, выполненный в виде шнура 5, по меньшей мере один конец которого соединен с упругим элементом 6, в промежутках между шкивами 4 установлены подвижные шкивы 21, которые установлены на расположенные под посадочной площадкой 1 актуаторы 22 и толкают шнур 5 центру. Оси шкивов 21 выведены на посадочную площадку 1 через пазы 23.
В варианте исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант фиг. 6а, 6б содержит установленные на посадочной площадке 1 с возможностью упругого линейного перемещения шкивы 4, которые расположены подобно расположению опор 2 БПЛА 3, шкивы 4 охватывает гибкий толкатель, выполненный в виде замкнутого шнура 5 в промежутках между шкивами 4 к шнурам 5 присоединены тяги 8, которые соединены по меньшей мере с одним устройством вытягивания тяги 11 (не показан). Для этого шкивы 4 установлены на упругие направляющие 24 и выступают над поверхностью посадочной площадки через пазы 25. Причем, упругое движение шкивов 4 ограничено и в момент позиционирования производится жесткое натяжение шнура 5 (фиг. 6б).
В варианте исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 7а, 7б на посадочной площадке установлены шкивы 4, которые расположены подобно расположению опор БПЛА, между шкивами 4 через один промежуток установлены упругие элементы в виде пружин 26, между которыми через шкивы 4 натянуты гибкие толкатели, выполненные в виде шнура 5 таким образом, что образуется замкнутый контур к шнурам 5 соединены тяги 8, которые соединены по меньшей мере с одним полюсом 9 и устройством 11 (не показан) вытягивания тяги 8. Между концами пружин 26 соединен отрезок шнура 27, ограничивающий удлинение пружины 26.
В варианте исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 8а, 8б содержит установленные на посадочной площадке 1 повернутые друг относительно друга группы шкивов 4а, 4б, 4в, 4г и 4д, 4е, 4ж, 4и, в каждой из которых шкивы 4 расположены подобно расположению опор 2 БПЛА 3, между соседними парами шкивов 4а и 4е; 4б и 4ж; 4в и 4и; 4г и 4д, которые определяют длинные стороны образованного точками 4а; 4е; 4б; 4ж; 4в; 4и; 4г; 4д расположения шкивов 4 многогранника, натянуты гибкие толкатели, выполненные в виде шнуров 5, которые с наружной стороны замкнуты с помощью упругих элементов, например, пружин 26, с внутренней стороны к шнурам 5 присоединены тяги 8, которые соединены по меньшей мере с одним полюсом 9 и устройством 11 вытягивания тяги (не виден). Шнуры 5 в местах крепления упругих элементов 6 имеют стопоры 28, на посадочной площадке 1 установлены упоры 29, ограничивающие удлинение упругого элемента 26.
Вариант исполнения упругого элемента фиг. 9 выполнен в виде цилиндра 30 с заглушенными торцами 31, в которых выполнены отверстия для выхода штока 32, внутри установлены пружины 33 сжатия и поршни 34 со штоками 32, для соединения со шнуром 5.
Вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 10а, 10б содержит установленные на посадочной площадке 1, расположенные подобно расположению опор 2 БПЛА 3 шкивы 4, которых охватывает гибкий толкатель, выполненный в виде замкнутого шнура 5 из гибкого упругого материала. В промежутках между шкивами 4 к шнурам 5 соединены тяги 8, которые сходятся по меньшей мере в одном полюсе 9, где разворачиваются под посадочную площадку 1 и соединяются по менышей мере с одним устройством 11 вытягивания тяги (не виден).
В варианте исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 11а, 11б содержит установленные на посадочной площадке 1 повернутые друг относительно друга группы шкивов 4а, 4б, 4в, 4г и 4д, 4е, 4ж, 4и, в каждой из которых шкивы 4 расположены подобно расположению опор 2 БПЛА 3, между соседними парами шкивов 4а и 4е; 4б и 4ж; 4в и 4и; 4г и 4д, которые определяют длинные стороны образованного точками 4а; 4е; 4б; 4ж; 4в; 4и; 4г; 4д расположения шкивов 4 многогранника, натянуты гибкие толкатели, выполненные в виде шнуров 5 из гибкого упругого материала, с внутренней стороны к шнурам 5 из гибкого упругого материала присоединены тяги 8, которые соединены по меньшей мере с одним полюсом 9 и устройством 11 вытягивания тяги (не виден).
Вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 12а, 12б содержит установленные на посадочной площадке 1, расположенные подобно расположению опор 2 БПЛА 3 шкивы 4, которых охватывает гибкий толкатель в виде замкнутого шнура 5 из гибкого упругого материала. В промежутках между шкивами 4 с наружной стороны контура установлены подвижные шкивы 21, которые установлены на расположенные под посадочной площадкой 1 актуаторы 22 и толкают шнур 5 центру. Оси шкивов 21 выведены на посадочную площадку 1 через пазы 23.
Гибкий толкатель в виде шнура 5 из гибкого упругого материала может быть изготовлен из резинового шнура круглого или квадратного сечения, резинового шланга или резинового облицованного корда. В случае, если гибкий толкатель имеет поверхность из резины он может быть смазан, например, силиконовой смазкой, чтобы снизить трение с опорами 2 БПЛА
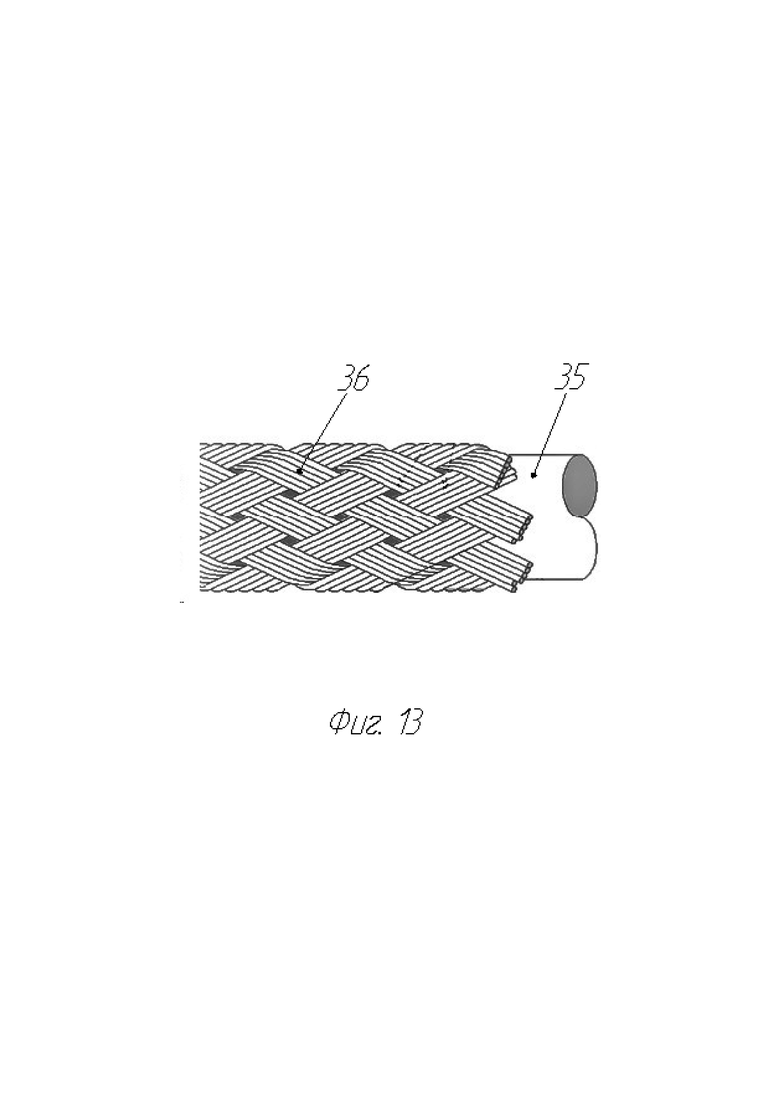
Шнур 5 из гибкого упругого материала (фиг. 13) может быть выполнен из упругого элемента 35, который может находиться в оплетке 36. Оплетка снижает трение с опорами 2 БПЛА3.
Упругий гибкий материал шнура может иметь ограниченное растяжение, которое действует сначала как упругий элемент, а по достижению заданной длины перестает растягиваться.
Упругим элементом 35 может быть, например, резиновое кольцо круглого, квадратного сечения, лент или резиновые нити, уложенные в оплетку 36 перекрестного плетения из нерастяжимых нитей или проволоки. При этом длину оплетки выбирают таким образом, чтобы при максимально возможном растяжении оплетки с содержимым резиновым шнуром длина шнура 5 составила длину, достаточную для позиционирования БПЛА 3.
Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант исполнения фиг. 1а, 1б, 1в, 1г работает следующим образом.
В исходном состоянии гибкий толкатель, выполненный в виде шнура 5, охватывает шкивы 4а, 4б,4в, 4г и 4д и натянут упругим элементом 6. Величина натяжения шнура 5 не позволяет ей касается посадочной площадки 1. Барабан 15 (фиг. 2) упругого элемента 6 заполнен шнуром 5. Пружина 16 скручена таким образом, что обеспечивает требуемое натяжение шнура 5, но при этом может обеспечить вращение барабана 15 до полной размотки шнура 5. Тяги 8 распущены из устройства 11 вытягивания тяги 8, на барабане 18 (фиг. 3) остается минимальная длина тяг 8.
Зона приземления БПЛА 3 на посадочной площадке представляет собой многоугольник, в частном случае выполнения квадрат, выполненный из шнура 5, который поделен тягами 8 на четыре четверти, каждая четверть предназначена для приема своей опоры 2.
БПЛА 3 приземляется на посадочную площадку, ориентируясь по изображению посадочной площадки или установленных на нем маркеров (не показаны). Вследствие ошибок управления и условии окружающей среды (ветер, особенно порывистый, видимость) БПЛА 3 приземляется на поверхность посадочной площадки 1 не точно. При этом важно, чтобы каждая опора 2 попала в свою четверть посадочной площадки, определяемым периметром из шнура 5 и тягами 8.
Одним из преимуществ данного устройства является возможность удержания БПЛА 3 на посадочной площадке после приземления в сильный ветер. БПЛА 3 не выкатится с посадочной площадки 1 за периметр, определяемый шнуром 5, что позволит не потерять БПЛА с посадочной платформы 1 и произвести его позиционирование.
После приземления БПЛА 3 на посадочную площадку 1 устройство 11 вытягивания тяги 8 начинает посредством двигателя 19 и редуктора 20 вращать барабан 18, наматывая тяги 8, которые тянут за собой гибкие толкатели в виде шнуров 5 по точкам присоединения тяг 8. Форма шнура 5 начинает приобретать форму четырехконечной звезды (см. фиг. 1в, поз 5а) где концы лучей определяются местоположением шкивов 4а, 4б, 4в, 4г и 4д, а впадины – местоположением коуша 10 или подвижного блока (не показано), с помощью которого тяги 8 присоединены к шнуру 5 в каждый момент. Недостающая длина шнура 5 вытягивается из упругого элемента 6 и по мере вытягивания шнура 5 его натяжение возрастает. На шкивах 4 шнур 5 изгибается к центру, уменьшая угол между смежными сторонами, которые как толкатели подхватывают встречающиеся на своем пути опоры 2 и толкают их, приводя БПЛА 3 в положение позиционирования. Учитывая, что в процессе движения на шнур 5 по бокам лучей взаимодействует с опорами 2 и может изгибаться, текущая форма четырехконечной звезды может быть не симметричной. К моменту полного вытягивания тяг 8 стороны лучей уменьшают угол до между собой и становятся практический параллельными отрезками шнура 5, между которыми находятся опоры 2 БПЛА 3 (см. фиг. 1в поз. 5б).
Если после завершения позиционирования нужно удерживать БПЛА 3 в таком положении, необходимо затормозить двигатель 19 или редуктор 20 устройства 11 вытягивания тяги 8 должен быть самотормозящимся, например, червячным. Если после позиционирования БПЛА 3 может самостоятельно находиться в таком положении, после выключения двигателя 19 устройства 11 вытягивания тяги 8 конструкция может быть возвращена в исходное состояние обратным вращением двигателя 19 устройства 11 вытягивания тяги 8 либо за счет упругого элемента 6. При этом периметр шнура 5 вокруг шкивов 4а, 4б,4в, 4г и 4д уменьшается, и излишняя длина шнура 5 возвращается на барабан 15 упругого элемента 6.
Благодаря тому, что позиционирование производится расположенными накрест продольно расположенными параллельными отрезками шнура 5 данное устройство позволяет позиционировать БПЛА 3 с различным расстоянием между опорами 2, что придает универсальность конструкции для работы с подобными БПЛА 3 с различным размером расположения опор 2.
Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант исполнения фиг. 4а, 4б, 4в работает аналогичным образом. На фиг. 4б представлены линии расположения шнура 5 в промежуточном положении поз. 5а и после позиционирования поз. 5б.
Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант исполнения фиг. 5а, 5б работает следующим образом.
В исходном состоянии шнур 5 охватывает шкивы 4а, 4б,4в, 4г и 4д и натянут упругим элементом 6. Величина натяжения шнур 5 не позволяет ей касается посадочной площадки 1. Барабан 15 (фиг. 2) упругого элемента 6 заполнен шнуром 5. Пружина 16 скручена таким образом, что обеспечивает требуемое натяжение шнура 5, но при этом может обеспечить вращение барабана 15 до полного опорожнения шнура 5. Шкивы 21 находятся в крайнем положении за периметром пролегания шнура 5, который представляет собой квадрат. Зона приземления БПЛА 3 на посадочной площадке представляет собой квадрат, выполненный из шнура 5.
После приземления БПЛА 3 на посадочную площадку 1 линейные актуаторы 22 толкают шкивы 21 к центру, шкивы 21 соответственно толкают шнур 5. Форма шнура 5 начинает приобретать форму четырехконечной звезды аналогично фиг. 1в, поз 5а где концы лучей определяются местоположением шкивов 4а, 4б,4в, 4г и 4д, а впадины – местоположением шкивов 21. Недостающая длина шнура 5 вытягивается из упругого элемента 6 и по мере вытягивания шнура 5 его натяжение возрастает. От шкивов 4 шнур 5 изгибается к центру, уменьшая угол между смежными сторонами, которые как толкатели подхватывают встречающиеся на своем пути опоры 2 и толкают их, приводя БПЛА 3 в положение позиционирования. Учитывая, что в процессе движения на шнур 5 по бокам лучей взаимодействует с опорами 2 и может изгибаться, получаемая форма четырехконечной звезды может быть не симметричной. К моменту перемещения шкивов 21 к центру стороны лучей уменьшают угол до между собой и становятся практический параллельными отрезками шнура 5, между которыми находятся опоры 2 БПЛА 3 (аналогично фиг. 1в поз. 5б).
Если после завершения позиционирования нужно удерживать БПЛА 3 в таком положении, актуатор 22 удерживает шкивы 21 в центральном положении. Если после позиционирования БПЛА 3 может самостоятельно находиться в таком положении, актуаторы 22 возвращают шкивы 21 в исходное состояние. При этом периметр шнура 5 вокруг шкивов 4а, 4б,4в, 4г и 4д уменьшается, и излишняя длина шнура 5 возвращается на барабан 15 упругого элемента 6.
Работа устройства позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант исполнения фиг. 6а, 6б
Особенностью устройства позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант исполнения фиг. 6а, 6б является то, что гибкий толкатель, выполненный в виде замкнутого шнура 5, и имеет постоянную длину. Вместо этого шкивы 4а, 4б, 4в, 4г имеют возможность упругого линейного перемещения в сторону полюса 9, для чего установлены на направляющие 24, в которых имеется упругий элемент (не показано). Причем, упругое движение шкивов 4 ограничено. В данном исполнении вместо тяг 8 могут быть использованы подвижные шкивы 21 аналогично варианта исполнения фиг. 4а.
В исходном состоянии шнур 5 охватывает шкивы 4а, 4б, 4в и 4г, которые с помощью упругих направляющих 24 вынесены максимально далеко от центра посадочной площадки 1.
После приземления БПЛА 3 тяги 8 начинают стягивать шнур 5 к центру, и она начинает приобретать форму четырехконечной звезды. При этом длина периметра остается постоянной, и звезда начинает уменьшать длину своих лучей, перемещая упруго шкивы 4а, 4б, 4в, 4г к центру. К моменту, когда происходит максимальное вытягивание тяг 8, упругие направляющие останавливают движение шкивы 4а, 4б, 4в, 4г оказываются максимально близко к центру и жестко зафиксированы. Происходит натяжение шнура 5, которое позволяет повысить точность позиционирования БПЛА3.
После позиционирование устройство может продолжать удерживать БПЛА 3 или вернуться в исходное состояние.
В варианте исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 7а, 7б обеспечивает позиционирование БПЛА 3 без охвата каждой опоры с двух сторон. Вместо этого с двух противоположных сторон посадочной площадки 1 на опоры 2 БПЛА 3 надвигаются гибкие толкатели, выполненные в виде шнура 5, которые принимают V-образную форму.
В исходном состоянии посадочная площадка 1 поделена на две части тягами 8 и огорожена шнуром 5, который установлен на шкивы 4 и натянут двумя упругими элементами в виде пружин растяжения. 26
БПЛА 3 приземляется на посадочную площадку 1 и при этом на каждую часть посадочной площадки 1 приземляются две опоры 2.
После приземления БПЛА 3 тяги 8 вытягивают шнур 5 к центру и он, изгибаясь в промежутке между шкивами 4, принимают V-образную форму. Необходимая длина шнура 5 вытягивается с боковых сторон, удлиняя пружину 26. В результате два V-образных клина из шнура 5 входят каждая между двух опор 2 БПЛА 3 и толкают их по ходу и поперек движения. К концу вытягивания тяг 8 длина пружины 26 становится равным длине отрезка шнура 27 и дальнейшее движение тяги 8 приводит резкому увеличению силы натяжения шнура 5, позволяя произвести позиционирование БПЛА 3 более точно. В результате, когда тяга 8 полностью вытягивается БПЛА 3 оказывается позиционированным (см. фиг. 7б), при этом шнур 5 не охватывает каждую опору 2 с двух сторон.
Вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем фиг. 8а, 8б отличает наличие установленных на посадочной площадке 1 повернутых друг относительно друга двух групп шкивов 4а, 4б, 4в, 4г и 4д, 4е, 4ж, 4и, в каждой из которых шкивы 4 расположены подобно расположению опор 2 БПЛА 3, и отдельных шнуров 5, которые натянуты на соседние шкивы 4а, 4е; 4б, 4ж; 4в, 4и; 4г 4в и подтянуты пружинами 26. При натяжении тяги 8 шнуры 5 вытягиваются и совместно с пружинами 26 образуют треугольники, а шнур 5 в виде V-образного клина входит между опор 2 БПЛА 3 и позиционируют его. Данная конструкция работоспособна при наличии двух шнуров 5 или более до большего количества опор 2 БПЛА 3.
При завершении позиционирования установленные на шнуре 5 стопоры 27, упираются на упоры 28, позволяя усилить натяжение шнура 5 для более точного позиционирования. После позиционирования каждая опора 2 оказывается охвачена разными шнурами 5.
Второй особенностью данной конструкции является то, что шнур 5 изгибается только в одну сторону. Это позволяет установить на него в качестве гибкого толкателя роликовую цепь одностороннего изгиба, которая не изгибается, толкая опоры 2 как жёсткий толкатель, и пружины 26 могут иметь небольшое натяжение, достаточное только для возврата его в исходное положение. Учитывая, что на обратный изгиб такая цепь работает как жесткий элемент, данное решение позволяет повысить точность и скорость позиционирования БПЛА 3.
В вариантах исполнения фиг 7а, 7б, фиг 8а, 8б в качестве упругого элемента применены пружины 26, а качестве устройства ограничения длины растяжения пружины 26 применен отрезок шнура 27 (фиг. 7а, 7б) или закрепленные на шнуре 5 стопоры 28 и установленные на посадочной площадке 1 упоры 29 (фиг. 8а, 8б). Данные конструкции могут быть заменены на вариант исполнения упругого элемента фиг. 9, который собран в едином корпусе и имеет собственные упоры для ограничения растяжения упругого элемента путем ограничения сжатия пружины 33. При растяжении штоков 32 в две стороны поршни 34 сжимают пружины 33 и останавливаются после полного сжатия пружин 33. Путем регулировки местоположения торцов 31 можно регулировать требуемую длину упругого элемента после растяжения.
Устройство позиционирования БПЛА вертикального взлета и посадки с гибким упругим толкателем вариант исполнения фиг. 10а, 10б работает следующим образом.
В исходном состоянии гибкий толкатель, выполненный в виде упругого шнура 5, упруго охватывает шкивы 4а, 4б, 4в, 4г. Величина натяжения шнура 5 не позволяет ей касается посадочной площадки 1. Тяги 8 выпущены из устройства 11 вытягивания тяги 8, на барабане 18 (см. фиг. 3) остается минимальная длина тяг 8.
Зона приземления БПЛА 3 на посадочной площадке представляет собой квадрат, выполненный из шнура 5, который поделен тягами 8 на четыре четверти, каждая четверть предназначена для приема своей опоры 2.
После приземления БПЛА 3 на посадочную площадку 1 устройство 11 вытягивания тяги 8 начинает посредством двигателя 19 и редуктора 20 вращать барабан 18, наматывая тяги 8, которые тянут за собой шнуры 5 по точкам присоединения тяг 8. Форма шнура 5 начинает приобретать форму четырехконечной звезды, где концы лучей определяются местоположением шкивов 4а, 4б,4в, 4г, а впадины – местоположением коуша 10, с помощью которого тяги 8 присоединены со шнуром 5 в каждый момент. Соответственно шнур 5 упруго удлиняется.
Учитывая, что в процессе движения на шнур 5 по бокам лучей взаимодействует с опорами 2 и может изгибаться, получаемая форма четырехконечной звезды может быть не симметричной. К моменту полного вытягивания тяг 8 стороны лучей уменьшают угол до между собой и становятся практический параллельными отрезками шнура 5, между которыми находятся опоры 2 БПЛА 3 (фиг. 10б).
Если после завершения позиционирования нужно удерживать БПЛА 3 в таком положении, необходимо затормозить двигатель 19 или редуктор 20 устройства 11 вытягивания тяги 8 должен быть самотормозящимся, например, с червячным. Если после позиционирования БПЛА 3 может самостоятельно находиться в таком положении, после выключения двигателя 19 устройства 11 вытягивания тяги 8 конструкция может быть возвращена в исходное состояние обратным вращением двигателя 19 устройства 11 вытягивания тяги 8 либо за счет упругого элемента 6. При этом периметр шнура 5 вокруг шкивов 4а, 4б,4в, 4г уменьшается за счет обратного сжатия и шнура 5.
Вариант исполнения устройство позиционирования БПЛА вертикального взлета и посадки с гибким упругим толкателем фиг. 11а, 11б работает следующим образом.
В исходном состоянии каждый упругий толкатель, выполненный в виде упругого шнура 5, упруго охватывает свои шкивы 4. После приземления БПЛА 3 на посадочную площадку 1 устройство 11 вытягивания тяги 8 начинает посредством двигателя 19 и редуктора 20 вращать барабан 18, наматывая тяги 8, которые тянут за собой шнуры 5 по точкам присоединения тяг 8. При натяжении тяги 8 каждый шнур 5 образует треугольник, вершинами которого являются шкивы 4, на которые она натянута и точка присоединения тяги 8. К центру посадочной площадки 1 каждый шнур вытягиваются в виде V-образного клина, который входит между опор 2 БПЛА 3 и позиционируют его. При этом происходит упругое удлинение шнура 5. При отпускании тяги 8 шнур 5 выправляется и упруго охватывает шкивы 4а, 4е; 4б, 4ж; 4в, 4и; 4г, 4д.
Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем вариант исполнения фиг. 12а, 12б работает следующим образом.
В исходном состоянии шнур 5 упруго охватывает шкивы 4а, 4б,4в, 4г. Величина натяжения шнур 5 не позволяет ей касается посадочной площадки 1. Шкивы 21 находятся в крайнем положении за периметром пролегания шнура 5, который представляет собой квадрат. Зона приземления БПЛА 3 на посадочной площадке представляет собой квадрат, выполненный из шнура 5.
После приземления БПЛА 3 на посадочную площадку 1 линейные актуаторы 22 толкают шкивы 21 к центру, шкивы 21 соответственно толкают шнур 5. Форма шнура 5 начинает приобретать форму четырехконечной звезды у которой концы лучей определяются местоположением шкивов 4а, 4б, 4в, 4г, а впадины – местоположением шкивов 21. От шкивов 4 шнур 5 изгибается к центру уменьшая угол между смежными сторонами, которые как толкатели подхватывают встречающиеся на своем пути опоры 2 и толкают их, приводя БПЛА 3 в положение позиционирования. Учитывая, что в процессе движения на шнур 5 по бокам лучей взаимодействует с опорами 2 и может изгибаться, получаемая форма четырехконечной звезды может быть не симметричной.
Если после завершения позиционирования нужно удерживать БПЛА 3 в таком положении, актуатор 22 удерживает шкивы 21 в центральном положении. Если после позиционирования БПЛА 3 может самостоятельно находиться в таком положении, актуаторы 22 возвращают шкивы 21 в исходное состояние. При этом периметр шнура 5 вокруг шкивов 4а, 4б,4в, 4г уменьшается и шнур 5 сжимается до требуемого размера.
Если в вариантах устройств фиг. 10а, 10б, фиг. 11а, 11б, фиг. 12а, 12б шнур 5 выполнен из гибкого упругого материала ограниченного растяжения, то к завершению позиционирования оболочка 36 максимально вытягивается и не дает растягиваться упругому материалу 35, шнур 5 теряет свойство упругого растяжения и работает как нерастяжимый гибкий шнур 5. Это позволяет нарастить усилие натяжения шнура 5 и повысить тем самым точность позиционирования БПЛА 3.
Таким образом, принятые технические решения позволяют создать простое, быстродействующее устройство позиционирования БПЛА различных типоразмеров, способное удерживать БПЛА в позиционированном состоянии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Посадочная платформа для беспилотного летательного аппарата | 2019 |
|
RU2710887C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2003 |
|
RU2235045C1 |
Изобретение относится к конструкции активных устройств позиционирования беспилотного летательного аппарата (далее – БПЛА) вертикального взлета и посадки и может применяться при разработке автоматических станций зарядки и обслуживания БПЛА. Устройство позиционирования БПЛА вертикального взлета и посадки содержит установленные на или над посадочной площадкой толкатели и механизм движения толкателей. Толкатели выполнены из гибкого материала. Обеспечивается надежное удержание БПЛА в точке позиционирования, создание устройства позиционирования для универсальной посадочной платформы, способной принимать различные типоразмеры БПЛА, упрощение конструкции устройства позиционирования БПЛА вертикального взлета и посадки. 2 н. и 14 з.п. ф-лы, 27 ил.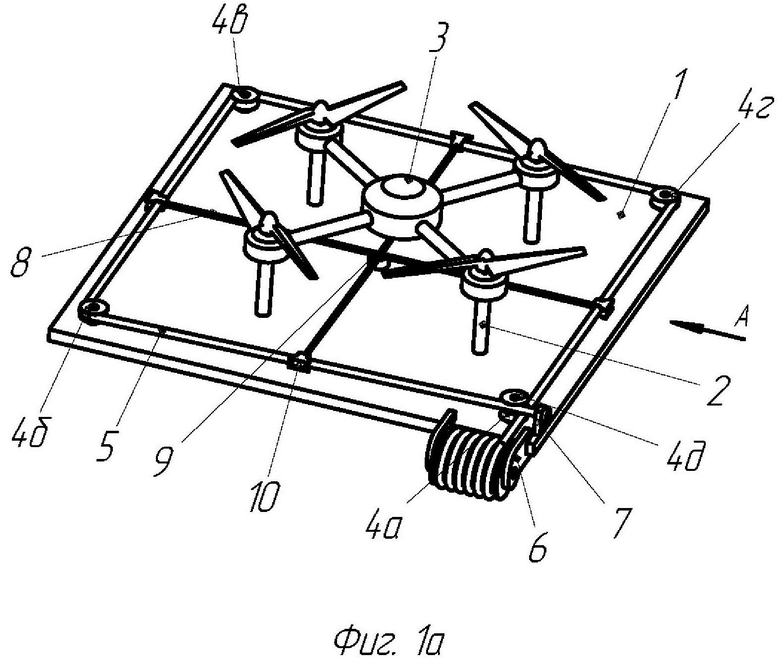
1. Устройство позиционирования БПЛА вертикального взлета и посадки, содержащее установленные на посадочной площадке толкатели и механизм движения толкателей, отличающееся тем, что толкатели выполнены из гибкого материала.
2. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 1, отличающееся тем, что в качестве гибкого материала используют шнур, трос, веревку, цепь.
3. Устройство позиционирования БПЛА вертикального взлета и посадки по любому из пп. 1, 2, отличающееся тем, что на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, шкивы охватывает гибкий толкатель, выполненный в виде шнура, по меньшей мере один конец которого соединен с упругим элементом, в промежутках между шкивами к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги.
4. Устройство позиционирования БПЛА вертикального взлета и посадки по любому из пп. 1, 2, отличающееся тем, что на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, шкивы охватывает гибкий толкатель, выполненный в виде шнура, по меньшей мере один конец которого соединен с упругим элементом, в промежутках между шкивами установлены подвижные шкивы, которые толкают шнур центру.
5. Устройство позиционирования БПЛА вертикального взлета и посадки по любому из пп. 1, 2, отличающееся тем, что на посадочной площадке с возможностью упругого линейного перемещения установлены шкивы, которые расположены подобно расположению опор БПЛА, шкивы охватывает гибкий толкатель, выполненный в виде замкнутого шнура, в промежутках между шкивами к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги.
6. Устройство позиционирования БПЛА вертикального взлета и посадки по любому из пп. 1, 2, отличающееся тем, что на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, между шкивами через один промежуток установлены упругие элементы, например пружины, между которыми через шкивы натянуты гибкие толкатели, выполненные в виде шнура, таким образом, что образуется замкнутый контур, к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги.
7. Устройство позиционирования БПЛА вертикального взлета и посадки по любому из пп. 1, 2, отличающееся тем, что на посадочной площадке установлены две повернутые друг относительно друга группы шкивов, в каждой из которых шкивы расположены подобно расположению опор БПЛА, между парами шкивов, которые определяют длинные стороны образованного точками расположения шкивов многогранника, натянуты гибкие толкатели, выполненные в виде шнуров, которые с наружной стороны замкнуты с помощью упругих элементов, например пружин, с внутренней стороны к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги.
8. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 7, отличающееся тем, что между концами упругих элементов, например пружин, соединен отрезок шнура, ограничивающий удлинение упругого элемента.
9. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 7, отличающееся тем, что по обе стороны упругих элементов на гибкий толкатель, выполненный в виде шнура, установлены стопоры, а на посадочной площадке установлены упоры, ограничивающие удлинение упругих элементов.
10. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 7, отличающееся тем, что упругий элемент выполнен в виде цилиндра с заглушенными торцами, в которых выполнены отверстия для выхода штока, внутри установлены пружины сжатия и поршни со штоками, с которыми соединен шнур.
11. Устройство позиционирования БПЛА вертикального взлета и посадки по любому из пп. 7-9, отличающееся тем, что в качестве гибкого материала использована роликовая цепь одностороннего изгиба.
12. Устройство позиционирования БПЛА вертикального взлета и посадки, содержащее установленные над посадочной площадкой толкатели и механизм движения толкателей, отличающееся тем, что толкатели выполнены из гибкого упругого материала.
13. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 12, отличающееся тем, что на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, на которые натянут гибкий толкатель в виде замкнутого шнура из гибкого упругого материала, по крайней мере на части промежутках между шкивами к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги.
14. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 12, отличающееся тем, что на посадочной площадке установлены две повернутые друг относительно друга группы шкивов, в каждой из которых шкивы расположены подобно расположению опор БПЛА, между парами шкивов, которые определяют длинные стороны образованного точками расположения шкивов многогранника, натянуты гибкие толкатели, выполненные в виде замкнутых шнуров из гибкого упругого материала, к шнурам присоединены тяги, которые соединены по меньшей мере с одним устройством вытягивания тяги.
15. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 12, отличающееся тем, что на посадочной площадке установлены шкивы, которые расположены подобно расположению опор БПЛА, на которые натянут гибкий толкатель, выполненный в виде замкнутого шнура из гибкого упругого материала, по крайней мере на части промежутках между шкивами установлены подвижные шкивы, которые толкают шнур центру.
16. Устройство позиционирования БПЛА вертикального взлета и посадки по п. 12, отличающееся тем, что шнуры из гибкого упругого материала имеют ограничение по растяжимости.
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| WO 2019151947 A1, 08.08.2019 | |||
| US 20140124621 A1, 08.05.2014 | |||
| CN 109502040 A, 22.03.2019 | |||
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| WO 2018015960 A1, 25.01.2018. | |||

