Группа изобретении относится к способу приземления многовинтового БПЛА вертикального взлета и посадки на посадочную платформу, конструкции БПЛА вертикального взлета и конструкции посадочной платформы, реализующих указанный способ. Группа изобретений может быть использована при разработке работающих совместно БПЛА вертикального взлета и посадочной платформы.
Известны следующие технические решения, которые являются прототипом заявляемой группы изобретений:
Беспилотные летательный аппарат патент US 2014/0145026 А1 содержит центральный структурный компонент, сконфигурированный для защиты электронных схем, и конструкционные балки, проходящие, как правило, горизонтально от противоположных сторон конструктивного компонента, причем каждая балка сконфигурирована таким образом, чтобы содержать электрическую проводку и двигатель, а также поддерживающий пропеллер.
Многороторный беспилотный летательный аппарат, патент CN 203047531 U содержит полый корпус, схемный модуль, который содержится в корпусе, рычаги, которые соединены с корпусом, силовые устройства, которые расположены на рычагах и используются для приведения во вращение несущих винтов.
Автоматическая базовая станция для беспилотных летательных аппаратов, полезная модель RU №199157 U1, содержит платформу, вычислительный модуль, модуль управления, систему крепления БПЛА и модуль питания. Вычислительный модуль, модуль управления, модуль питания и платформа смонтированы внутри защитного корпуса, при этом платформа смонтирована подвижно на приводном механизме, внутри корпуса смонтировано оборудование микроклимата, а система крепления выполнена в виде линейных механизмов позиционирования с зубчатыми ремнями, содержащих двойные параллельные горизонтальные и вертикальные рейки, смонтированные на верхних и нижних участках зубчатых ремней, натянутых между приводами и шкивами вдоль каждого из краев платформы с возможностью сближения к центру и удаления от центра платформы реек, корпус сверху закрыт крышкой, снабженной механизмом автоматического открывания и закрывания.
Базовая станция беспилотного летательного аппарата, патент RU 200137 U1 содержит корпус с люком и сдвижной крышкой, посадочную поверхность для установки БПЛА. Посадочная поверхность выполнена с возможностью независимого вертикального подъема и опускания. На посадочной поверхности установлены рейлинги, предназначенные для точного позиционирования БПЛА на посадочной поверхности.
Существенным недостатком указанных технических решений являются следующее: Во-первых, в приведенных способах приземления БПЛА посадочная площадка должна быть выполнена не меньше габаритов БПЛА с учетом возможной зоны нахождения воздушных винтов и для опускания посадочной площадки с БПЛА в корпус посадочной платформы требуется люк большого размера, а для хранения БПЛА требуется посадочная платформа большого размера.
Во-вторых, недостатком известных посадочных платформ является то, что они не позволяют реализовать способ приземления, при котором БПЛА вертикального взлета и посадки может храниться в посадочной платформе малого размера.
Технической задачей заявляемой группы изобретений является уменьшение размеров и веса посадочной платформы для приема и хранения БПЛА вертикального взлета и посадки.
Технический результат заявляемой группы изобретений достигается тем, что:
В способе приземления многовинтового БПЛА вертикального взлета и посадки, при котором БПЛА приземляется на посадочную площадку, позиционируется на посадочной площадке, после чего посадочная площадка опускается в корпус посадочной платформы и закрывается люком, до опускания посадочной площадки с БПЛА в корпус посадочной платформы винты БПЛА устанавливаются таким образом, что БПЛА имеет минимальный габаритный размер в проекции на посадочную площадку.
Кроме того, воздушные винты БПЛА устанавливаются перпендикулярно лучам БПЛА.
Кроме того, воздушные винты БПЛА устанавливаются параллельно друг другу.
Кроме того, воздушные винты БПЛА устанавливаются параллельно граням охватывающего его многоугольника.
Кроме того, посадочная платформа, содержащая корпус с люком и крышками люка, посадочную площадку с устройством позиционирования БПЛА после приземления, содержит дополнительно устройства поворота и удержания воздушных винтов БПЛА.
Сущность группы изобретений поясняется следующим графическим материалом.
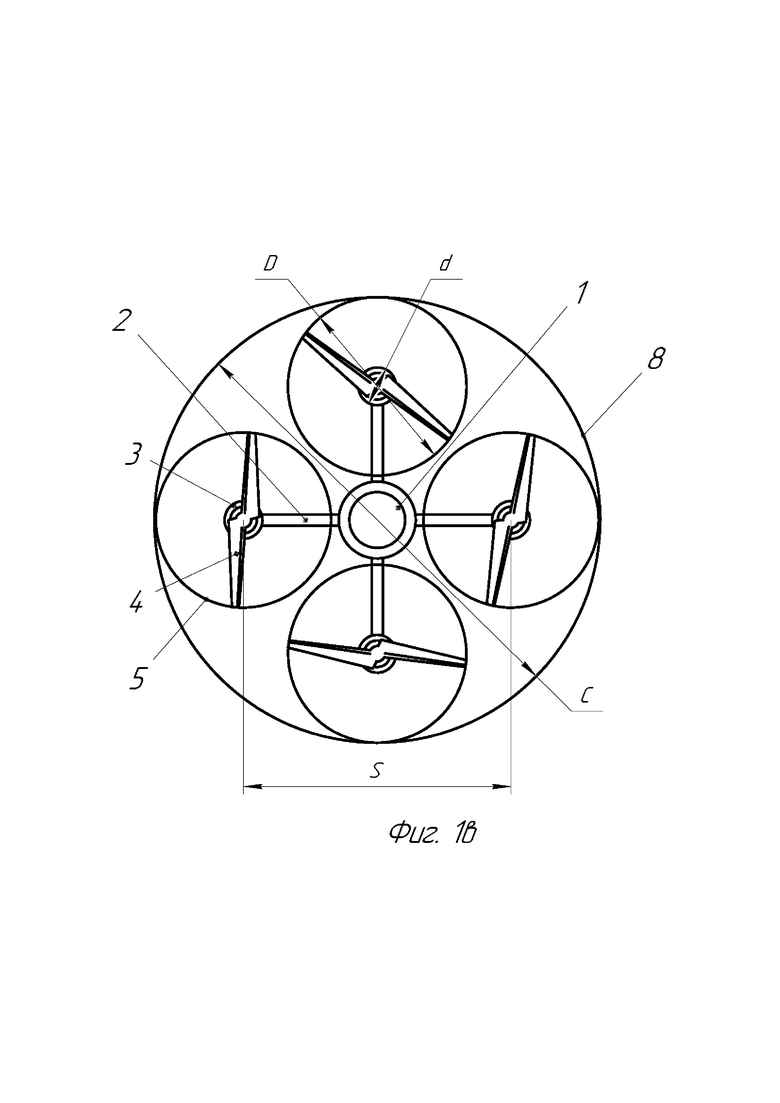
На фиг. 1а, 1б и 1в представлены вид сверху БПЛА с четырьмя воздушными винтами и очерчены варианты представления их применительно к люку посадочной платформы.
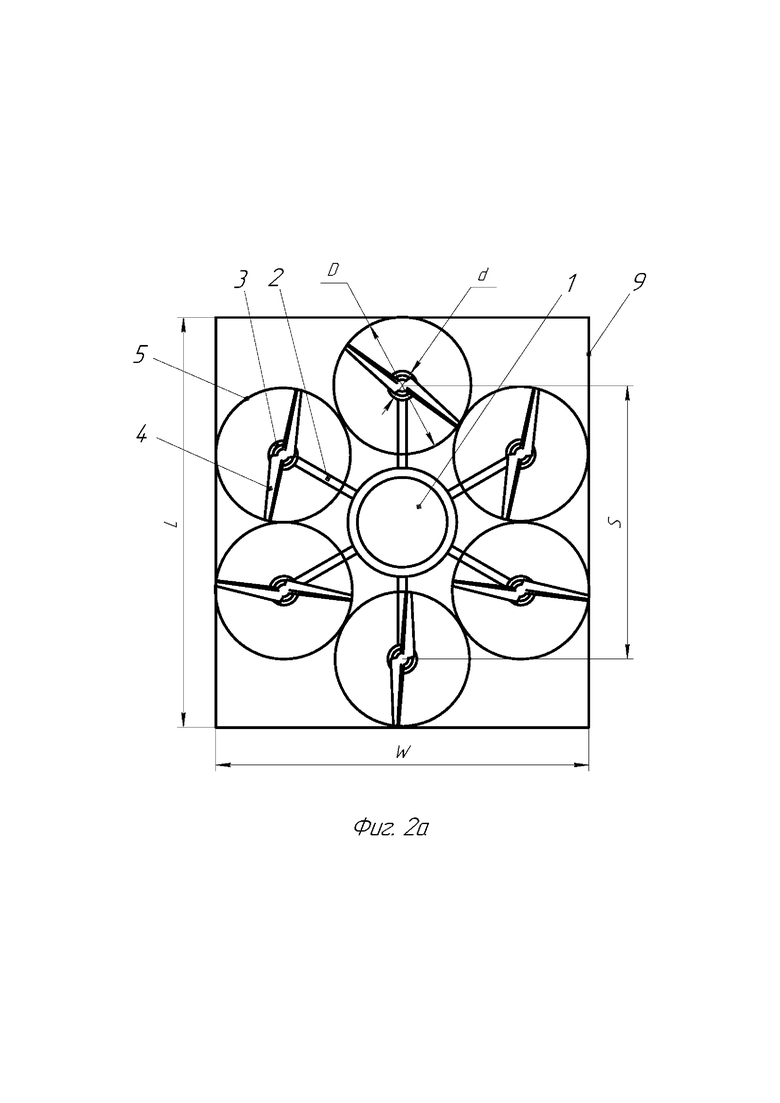
На фиг. 2а и 2б представлены вид сверху БПЛА с шестью воздушными винтами и очерчены варианты представления их применительно к люку посадочной платформы.
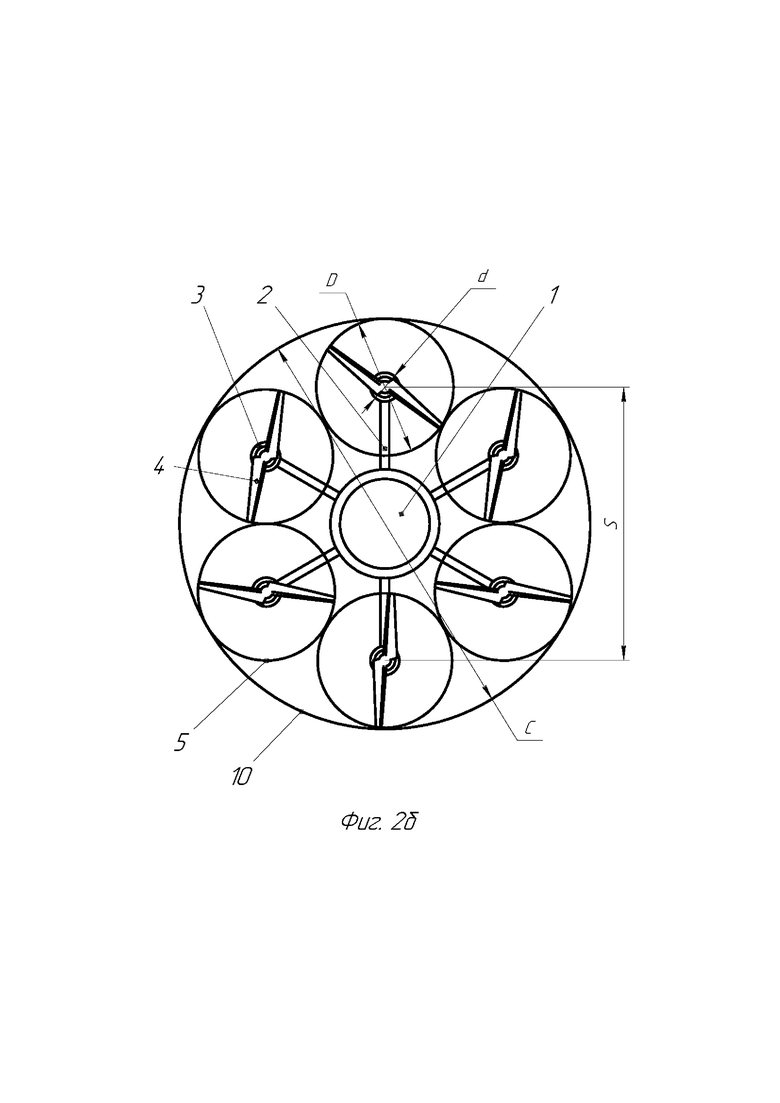
На фиг. 3а, 3б, 3в и 3г представлены вид сверху БПЛА с четырьмя воздушными винтами после ориентации воздушных винтов и очерчены варианты представления их применительно к люку посадочной платформы.
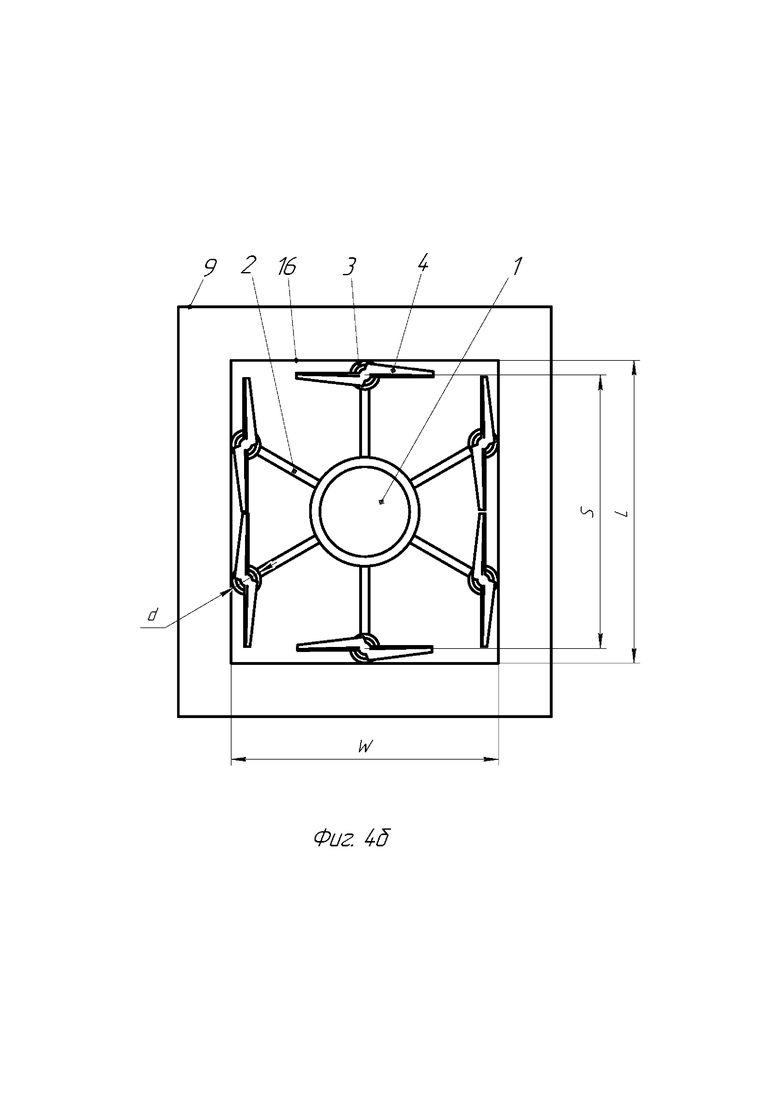
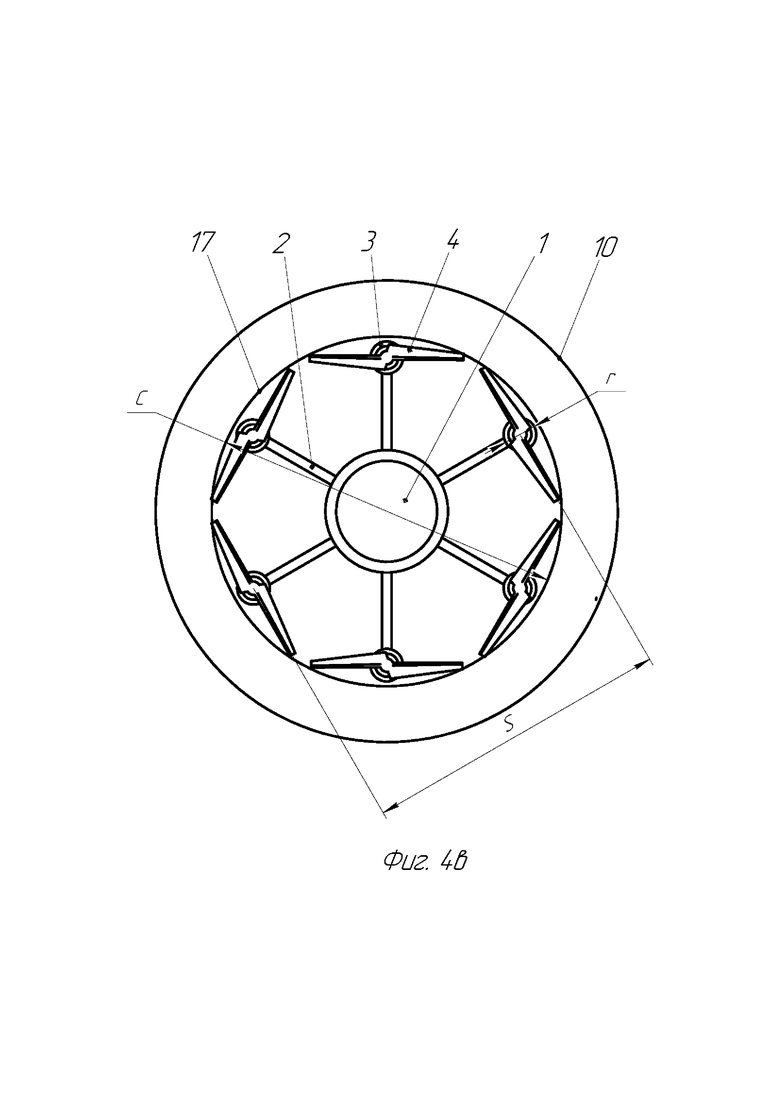
На фиг. 4а, 4б и 4в представлены вид сверху БПЛА с шестью воздушными винтами после ориентации воздушных винтов и очерчены варианты представления их применительно к люку посадочной платформы.
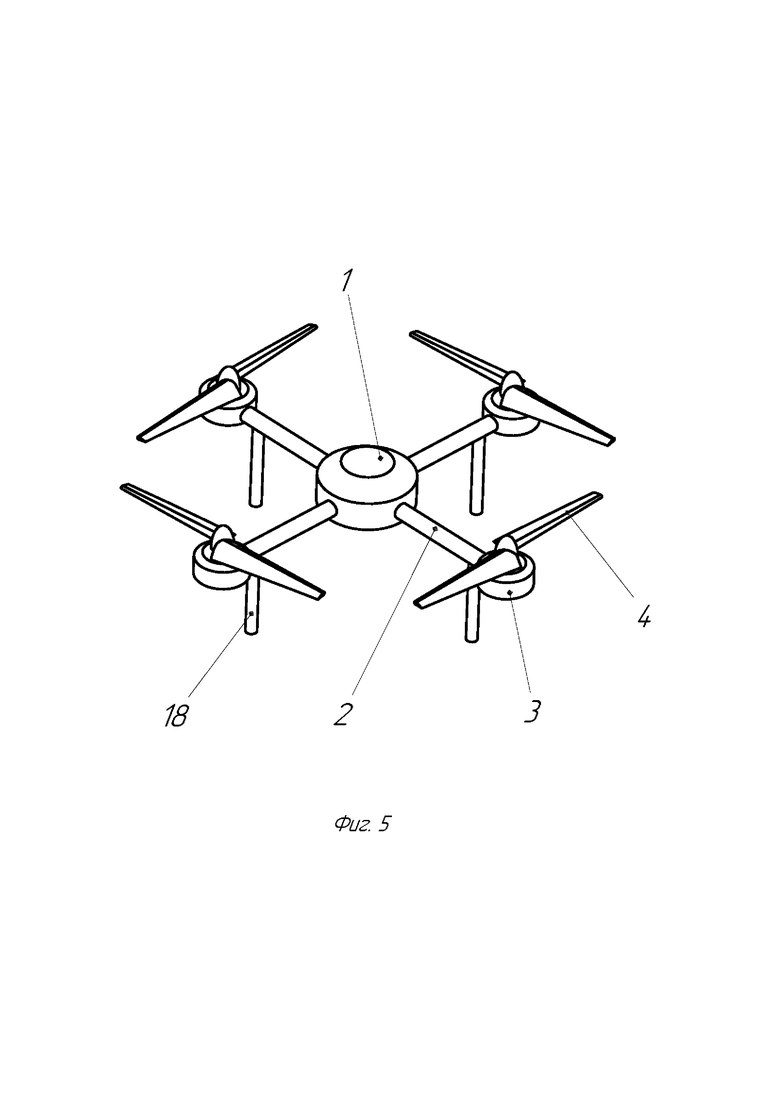
На фиг. 5 представлен общий вид БПЛА вертикального взлета и посадки.
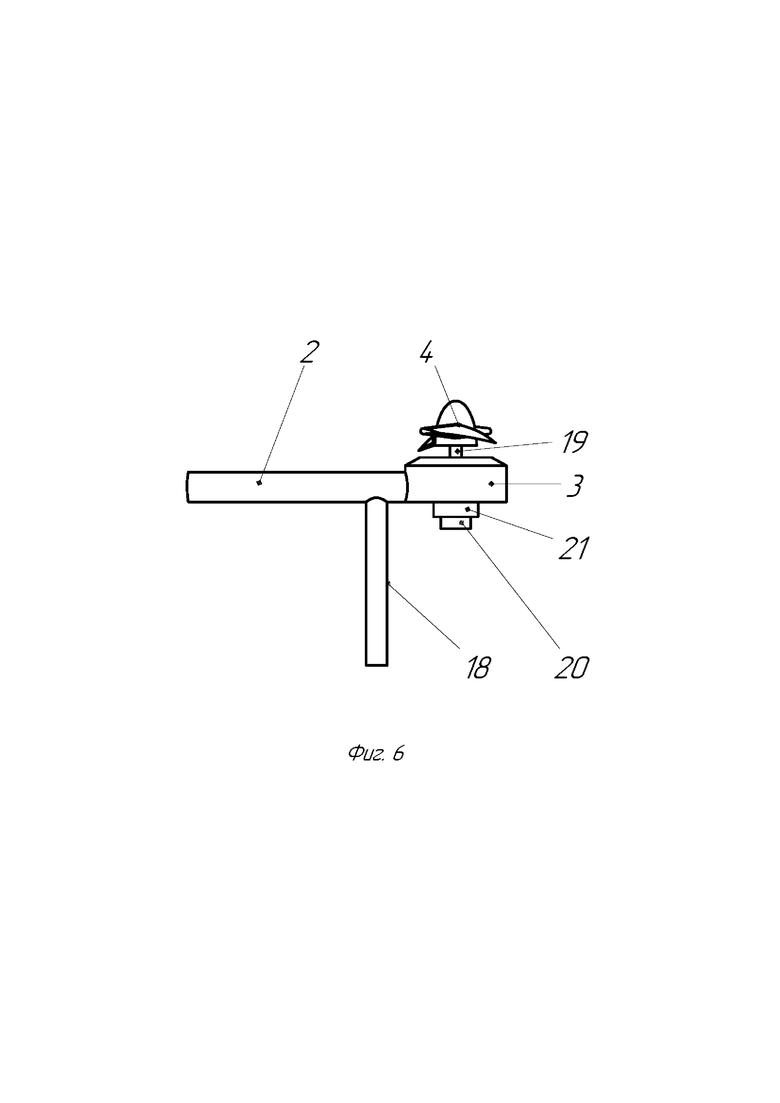
На фиг. 6 представлен луч БПЛА с установленным на нем двигателем, воздушным винтом, датчиком угла поворота воздушного винта и тормозом вала двигателя.
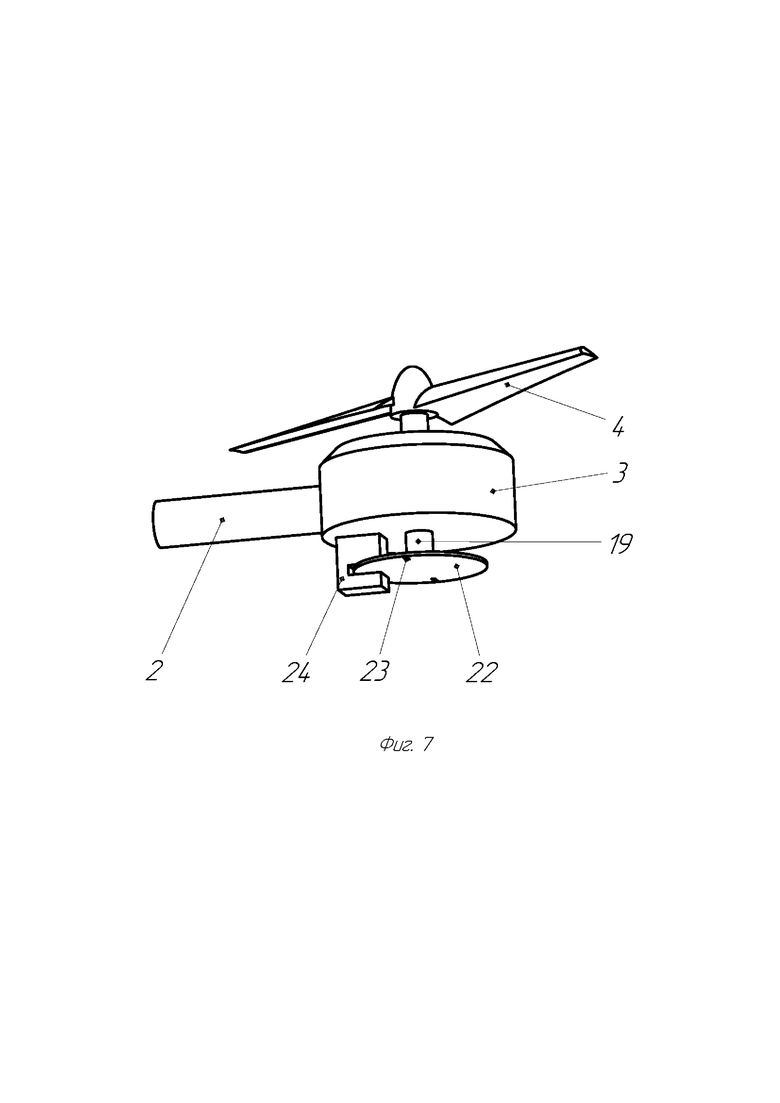
На фиг. 7 представлен луч БПЛА с установленным на нем двигателем, воздушным винтом, и датчиком углового положения вала двигателя в виде диска с отверстиями, выполненными на заданных углах, и щелевого оптического датчика.
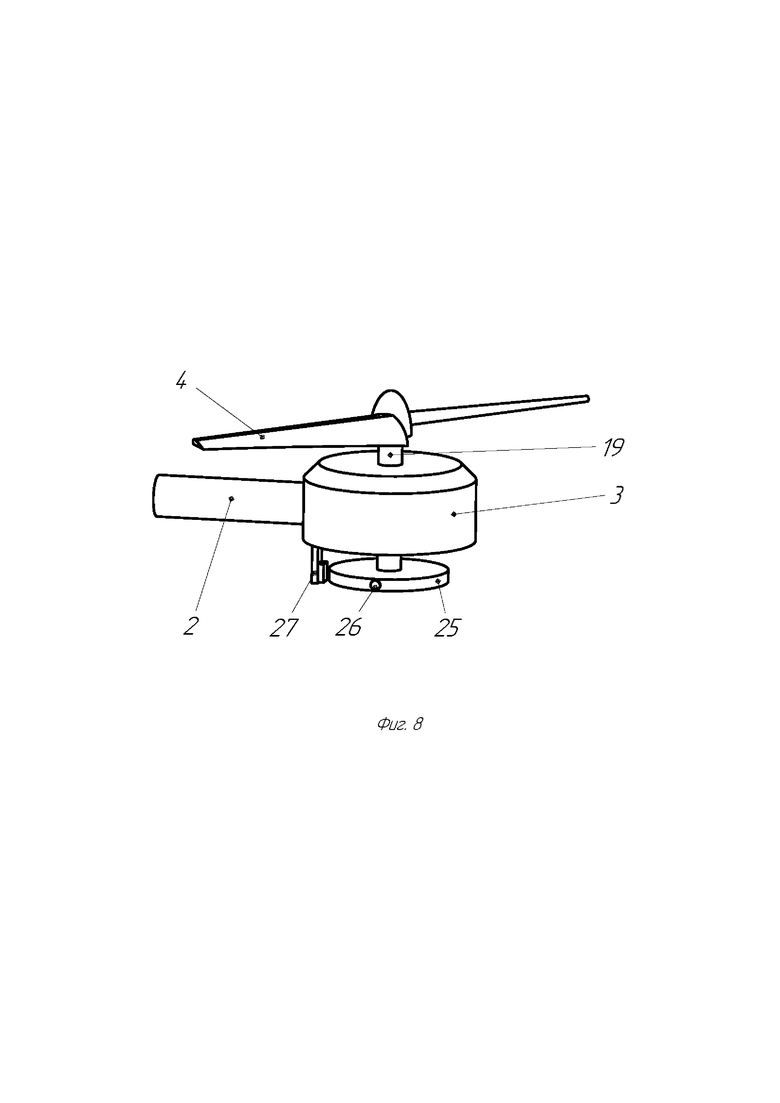
На фиг. 8 представлен луч БПЛА с установленным на нем двигателем, воздушным винтом, и датчиком углового положения вала двигателя виде установленного на валу двигателя диске на котором на заданных углах размещены миниатюрные магниты и установленного датчика Холла.
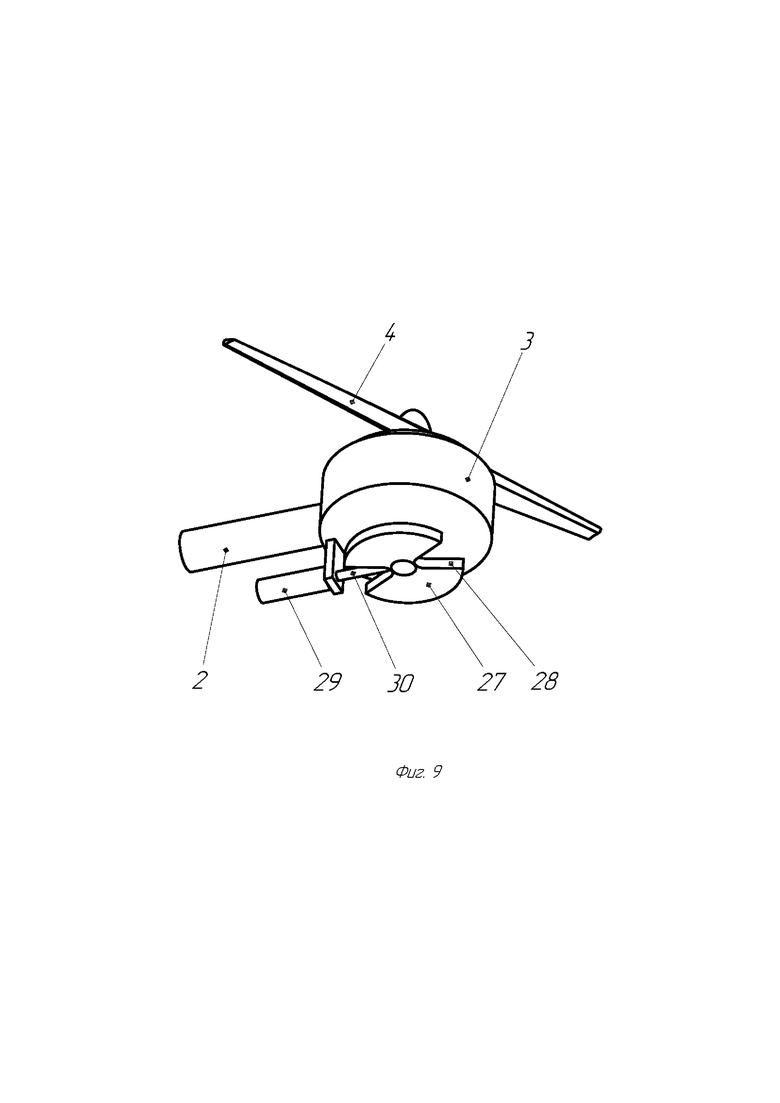
На фиг. 9 представлен луч БПЛА с установленным на нем двигателем, воздушным винтом и устройством поворота и удержания воздушных винтов БПЛА в виде диска с секторами и толкателя с фиксирующим штырем.
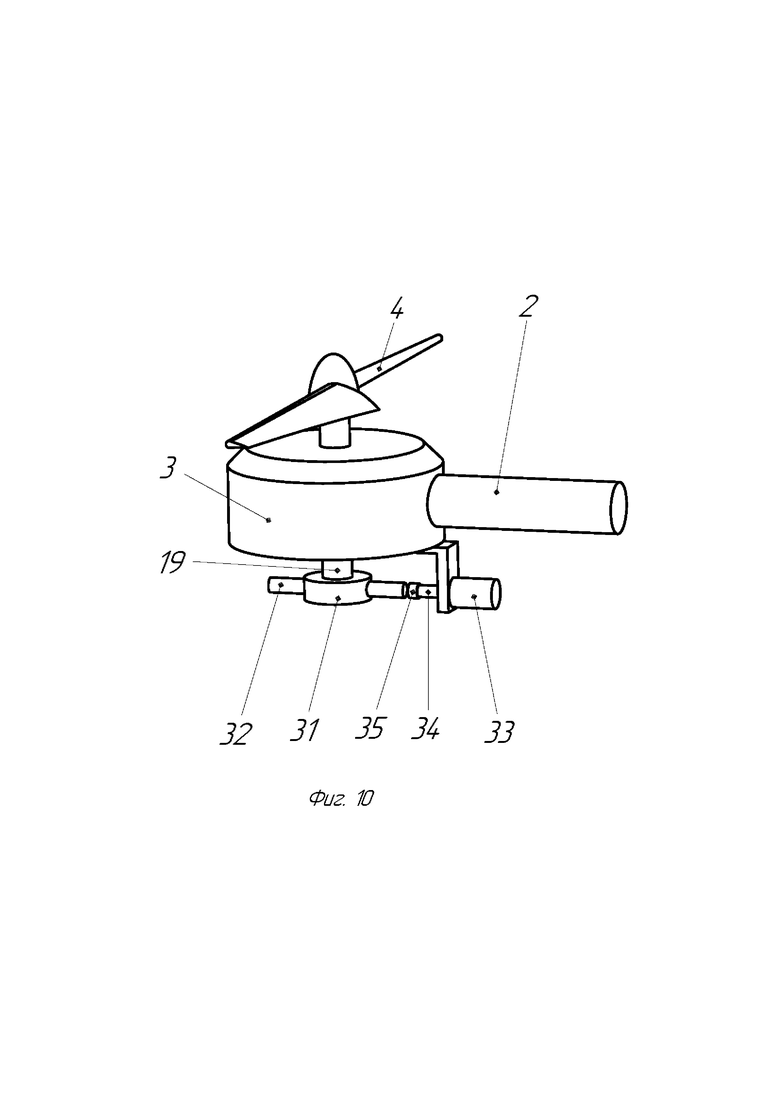
На фиг. 10 представлен луч БПЛА с установленным на нем двигателем, воздушным винтом и устройством поворота, и удержания воздушных винтов БПЛА в виде установленного на вал двигателя ступицы с радиально насаженными штырями магнитного материала и магнита на штоке толкателя.
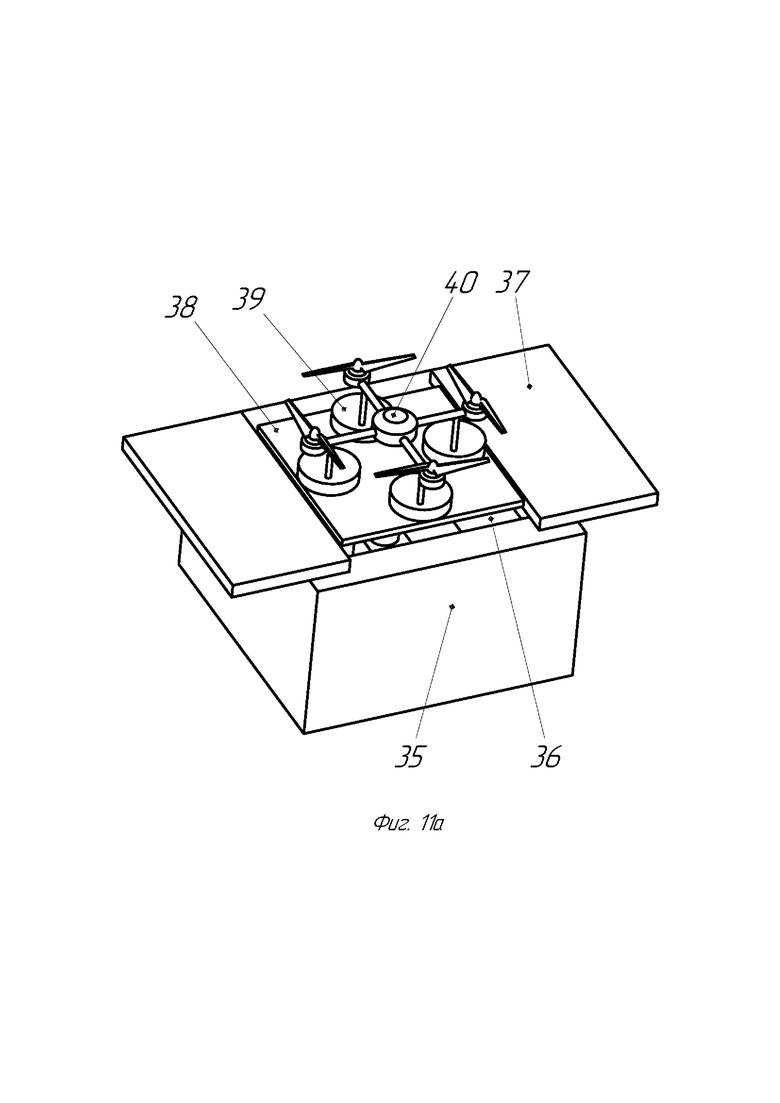
На фиг. 11а представлена посадочная платформа с приземлившимся БПЛА с четырьмя лучами, которые установлены параллельно стенкам люка.
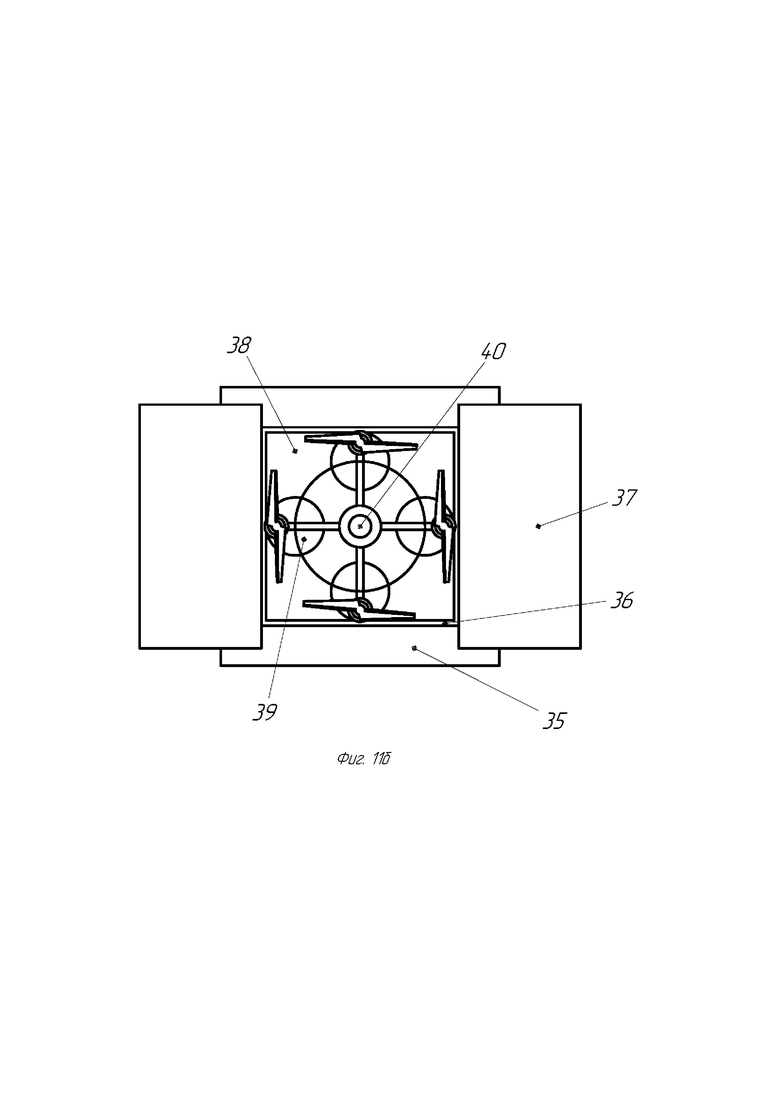
На фиг. 11б представлена посадочная платформа 11а вид сверху.
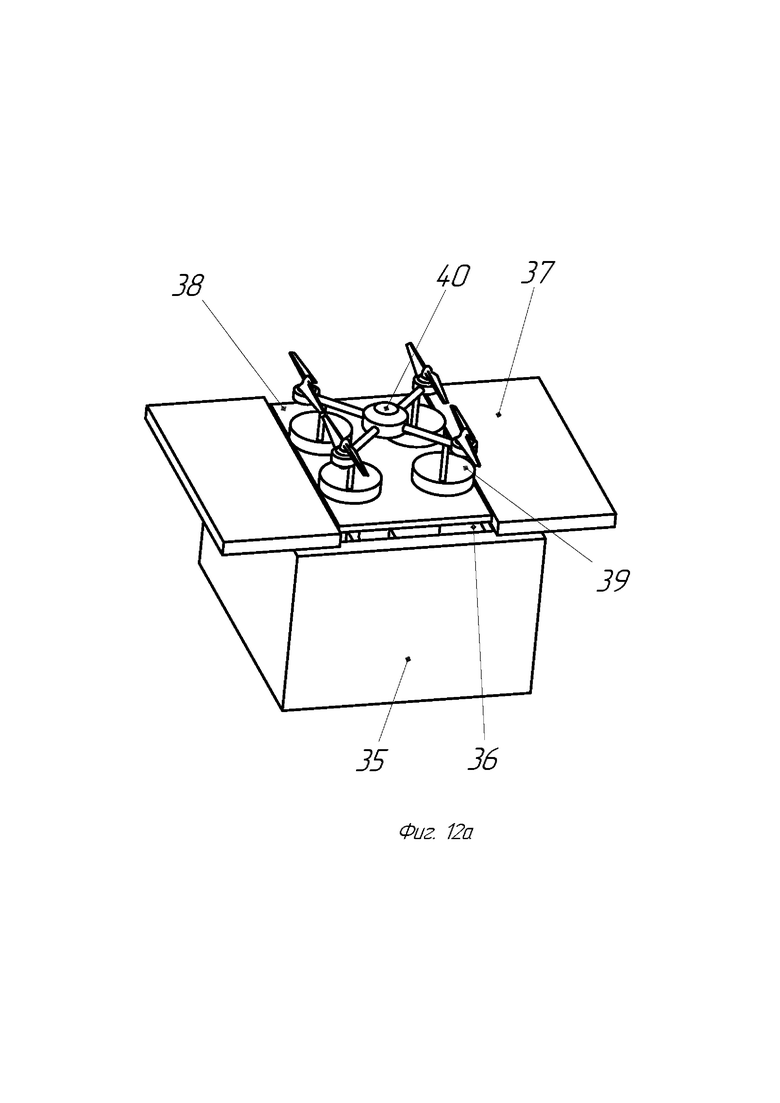
На фиг. 12а представлена посадочная платформа с приземлившимся БПЛА с четырьмя лучами, которые установлены по диагонали люка.
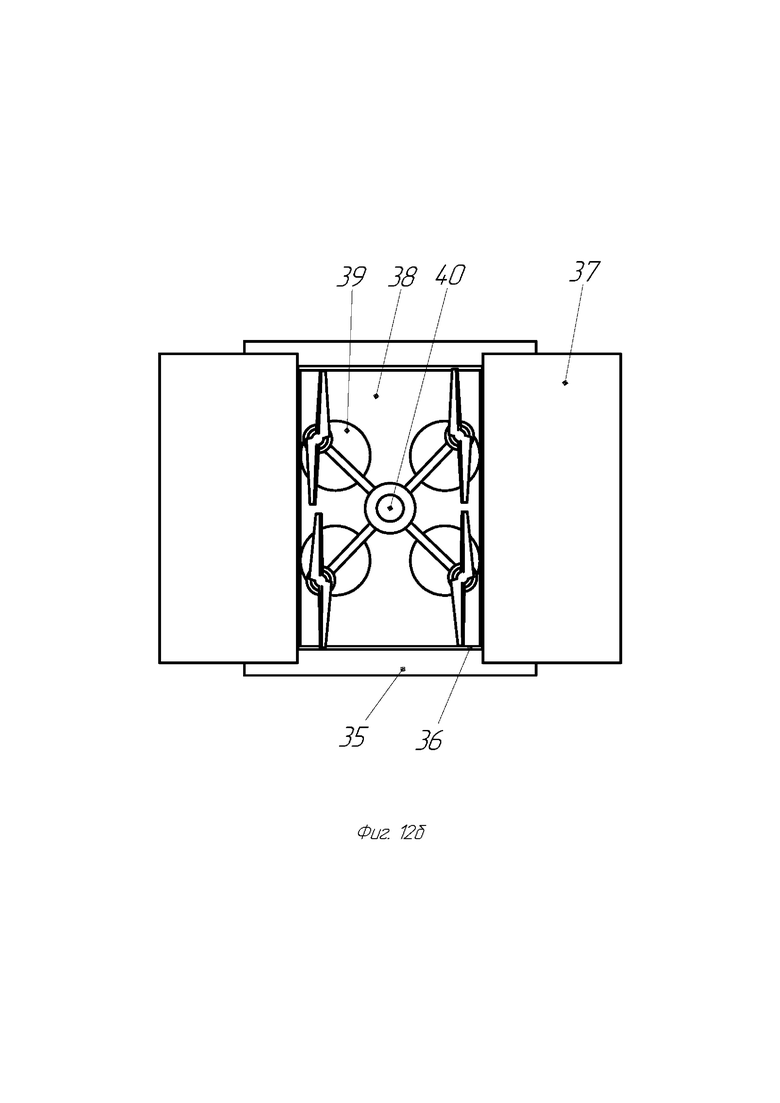
На фиг. 12б представлена посадочная платформа 11а вид сверху.
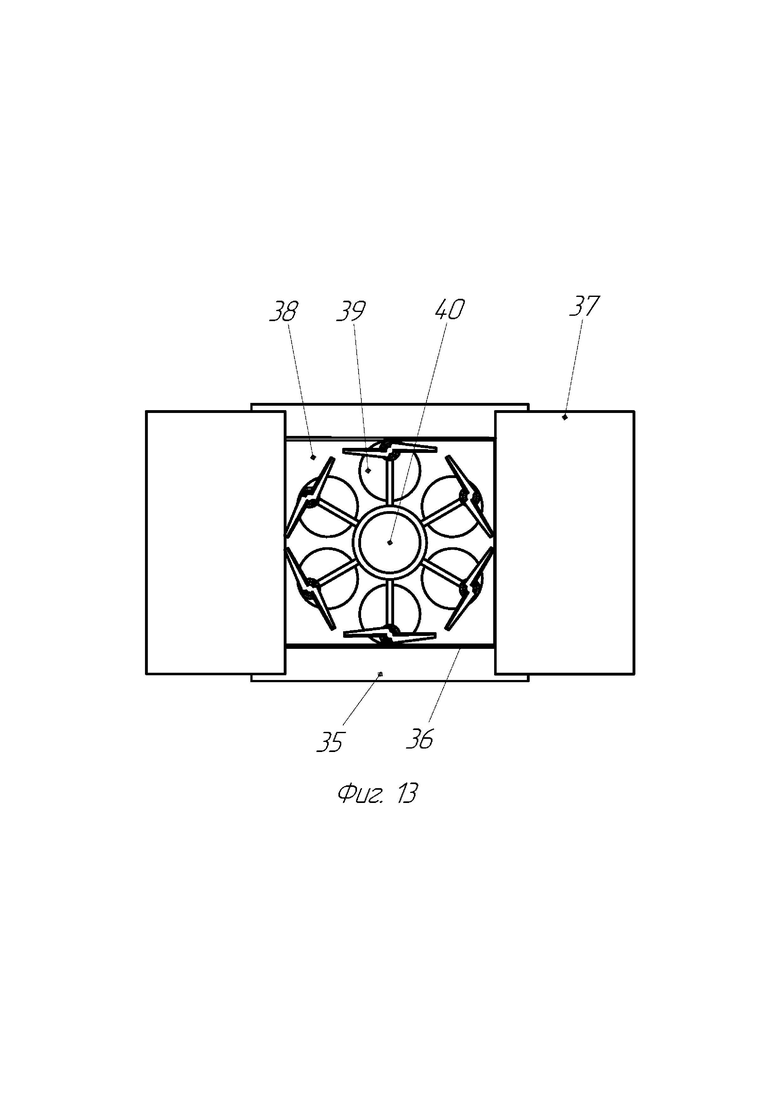
На фиг. 13 представлена посадочная платформа с приземлившимся БПЛА с шестью лучами, воздушные винты которого расположены перпендикулярно соответствующим лучам.
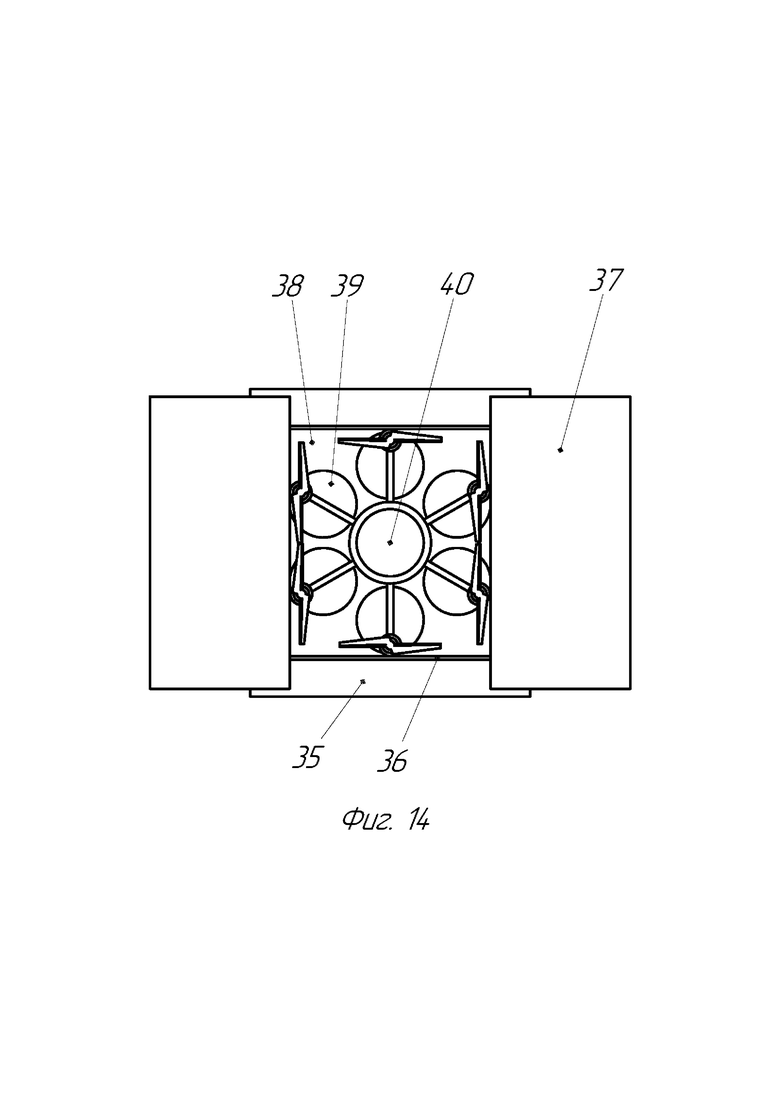
На фиг. 14 представлена посадочная платформа с приземлившимся БПЛА с шестью лучами воздушные винты которого расположены параллельно стенок люка.
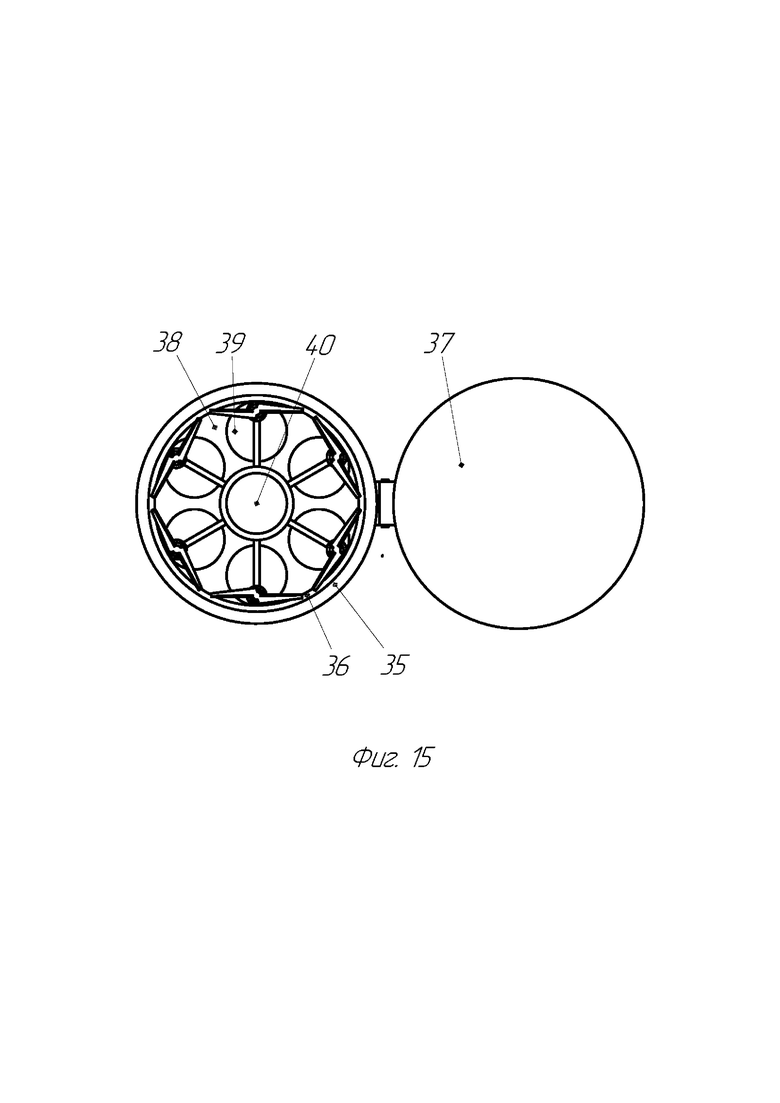
На фиг. 15 представлена круглая посадочная платформа с приземлившимся БПЛА с шестью лучами и открытым люком.
На фиг. 16а представлена посадочная платформа с устройством поворота и удержания воздушных винтов БПЛА.
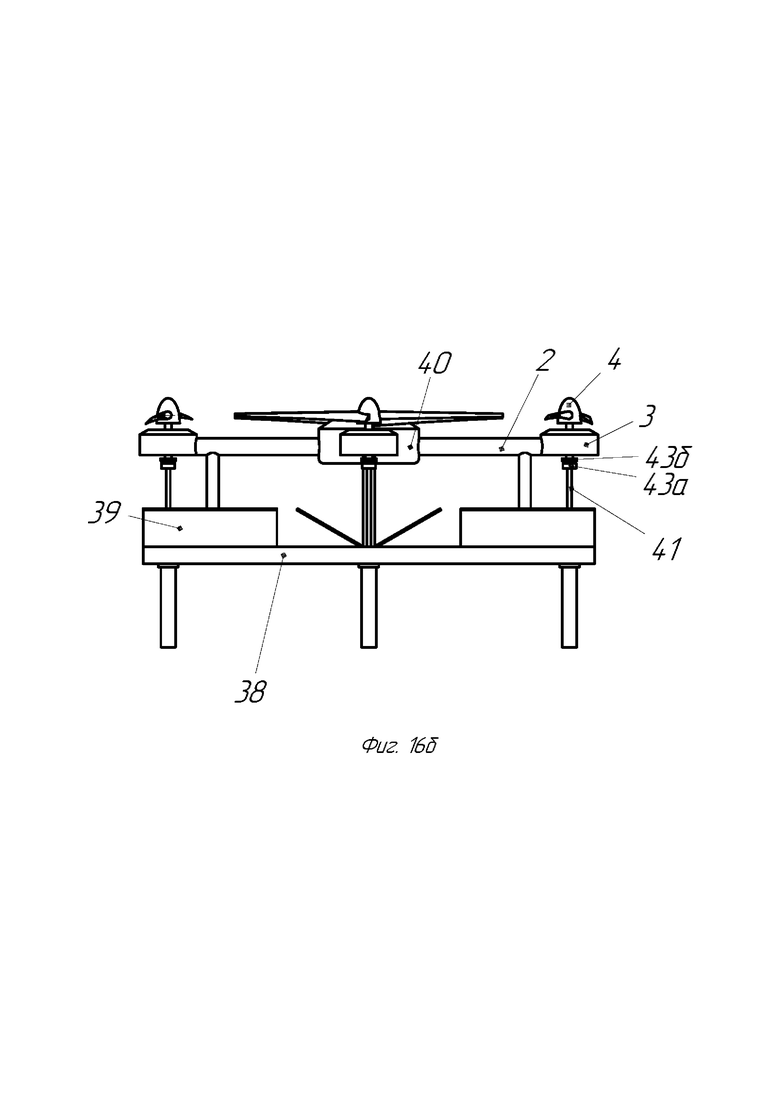
На фиг. 16б представлена посадочная площадка с устройством поворота и удержания воздушных винтов БПЛА (вид сбоку).
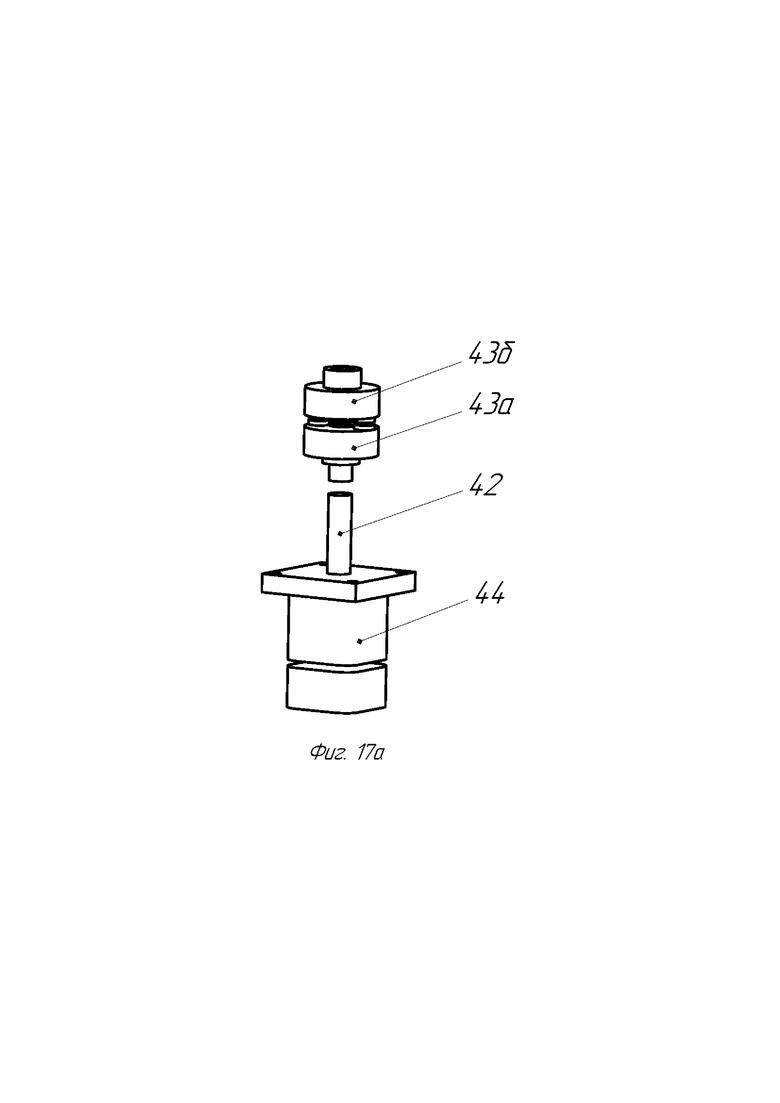
На фиг. 17а представлен вариант исполнения устройства поворота и удержания воздушных винтов БПЛА.
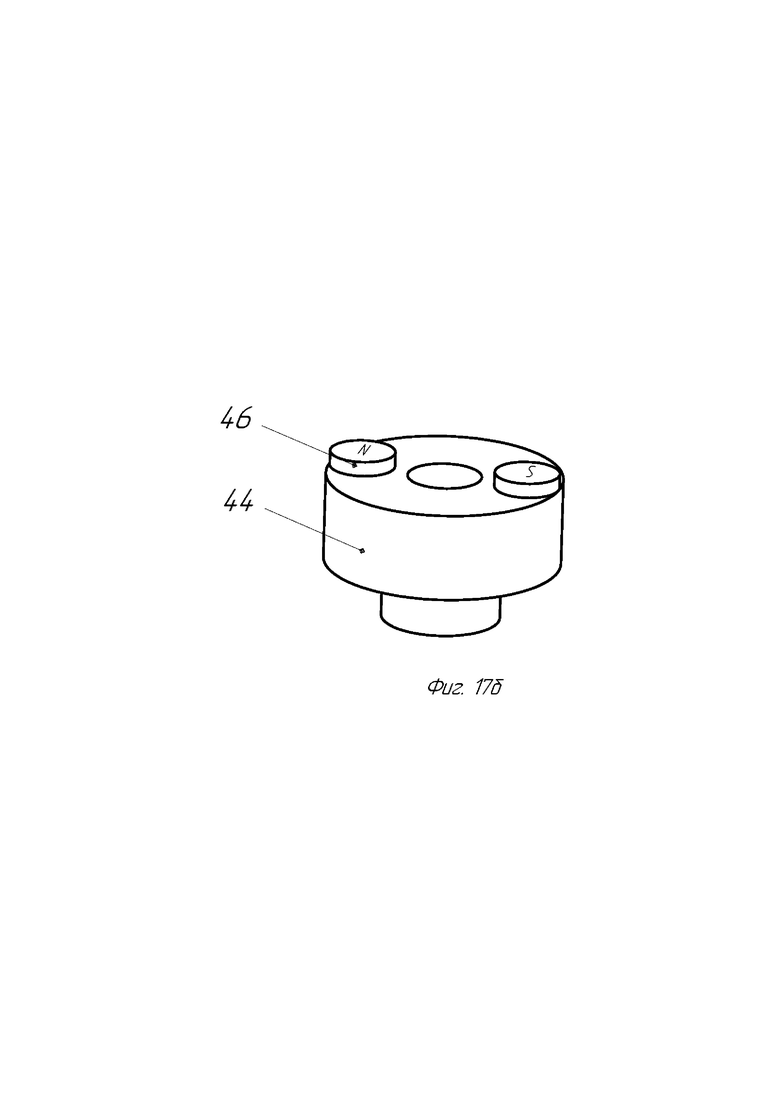
На фиг. 17б представлена полумуфта магнитной муфты.
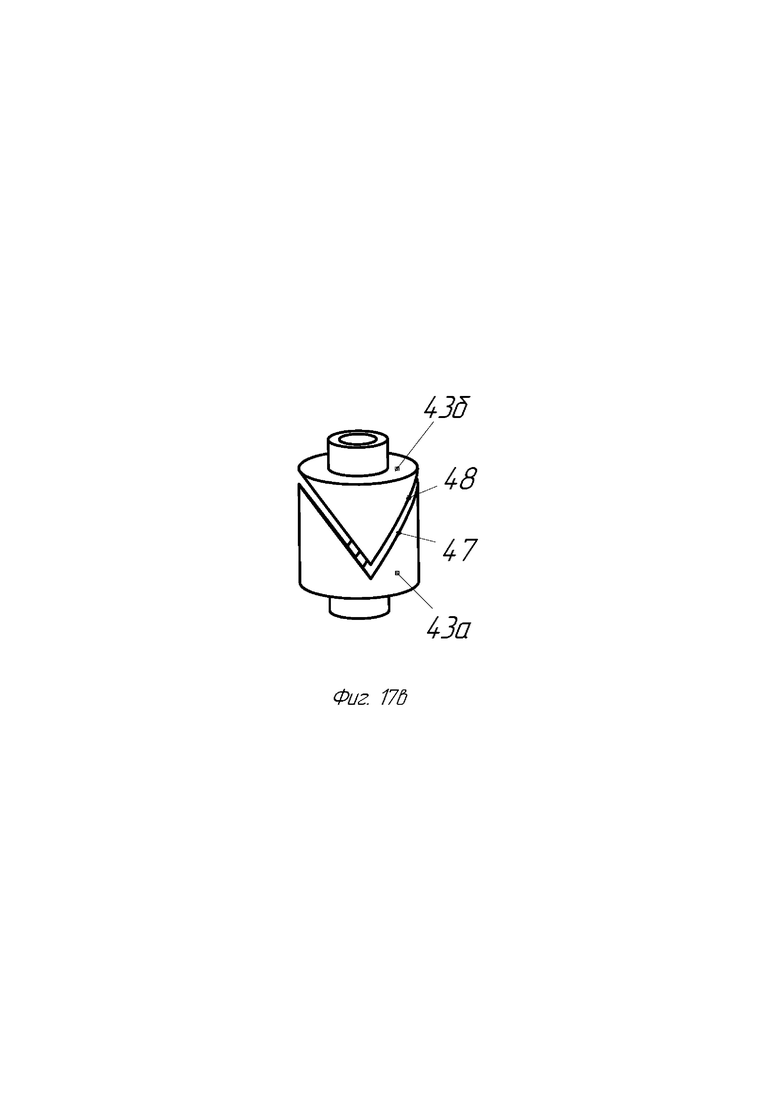
На фиг. 17в представлена муфта, полумуфты которого выполнены в виде цилиндрического корпуса с призматическим углублением и выступом, выполненным в виде выступающей призмы.
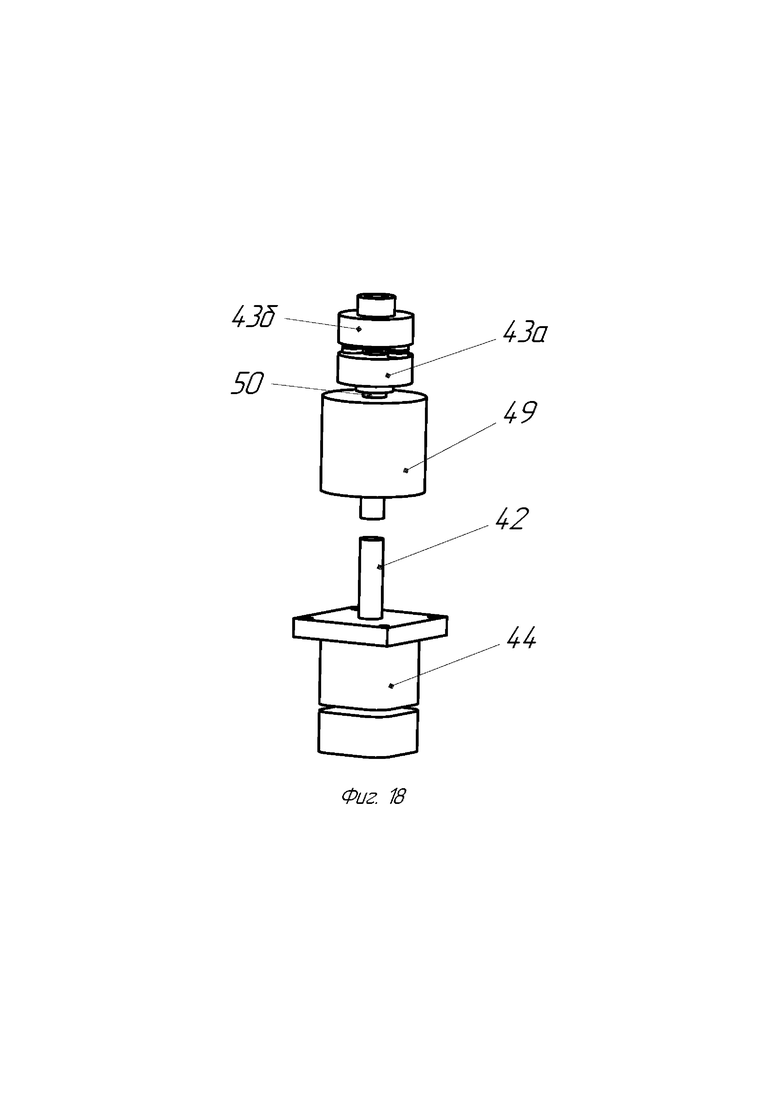
На фиг. 18 представлено устройство поворота и удержания воздушных винтов, которое выполнено в виде выдвижного штока, на конце которого установлен двигатель с насаженной на вал полумуфтой.
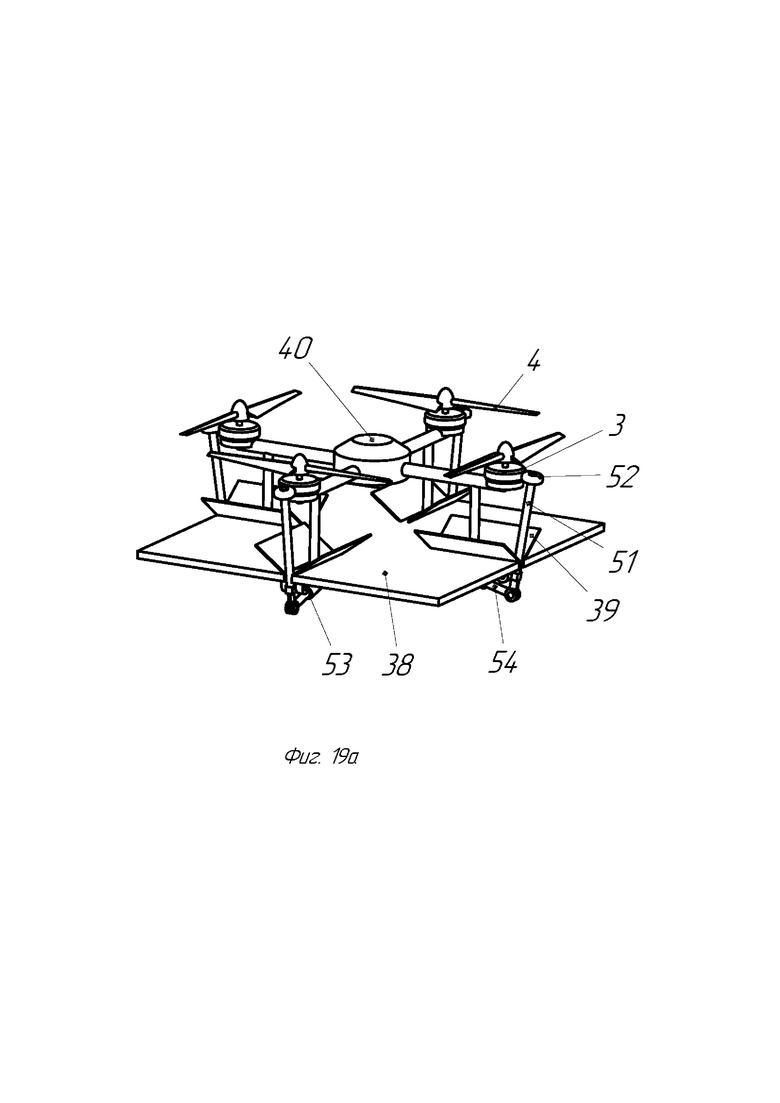
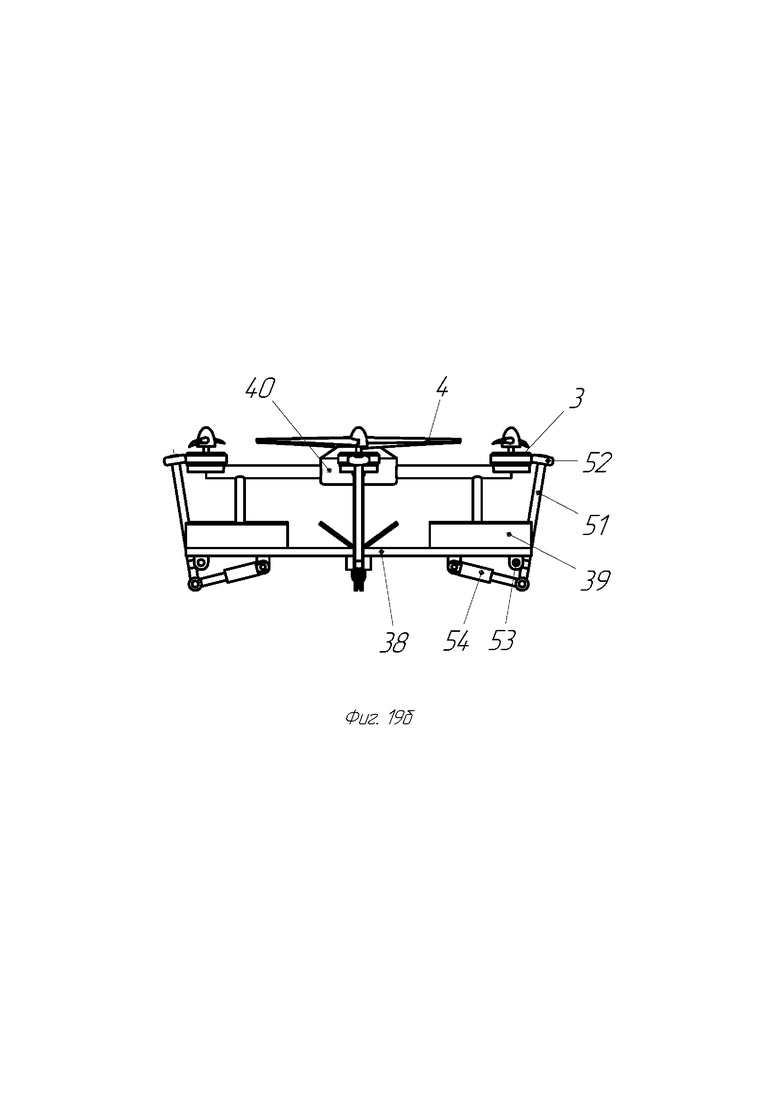
На фиг. 19а и 19б представлена посадочная площадка с устройством поворота и удержания воздушных винтов, которое выполнено в виде рычага, на конце которого установлено мотор-колесо.
На фиг. 1-4 показаны вид сверху различных БПЛА. На этих же фигурах представлены геометрические фигуры (квадрат, прямоугольник, круг) которые определяют габариты БПЛА в проекции на посадочную площадку (горизонтальную плоскость) и относительно которых должны располагаться боковые стенки и/или верхний люк камеры хранения БПЛА посадочной платформы.
На фиг. 1-2 представлены виды сверху БПЛА, воздушные винты которых расположены случайным образом после останова двигателя.
На фиг. 3-4 представлены виды сверху БПЛА, воздушные винты которых установлены таким образом, чтобы БПЛА имел минимальный габаритный размер в проекции на посадочную площадку.
На фиг. 1а представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4. Позицией 5 обозначены круги, очерчиваемые концами воздушных винтов 4. Угловое положение воздушных винтов 4 не определено и концы их лопастей могут находиться в любой точке круга 5. Позицией 6 обозначен квадрат, стороны которого являются касательными к кругам 5, стороны квадрата 6 направлены параллельно лучам 2.
Квадрат 6 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА. Вместо квадрата 6 могут быть, например восьмиугольник, круг или другая фигура, которые могут дать другие габаритные размеры. Данный квадрат определяет размеры люка, через которые может быть опущен БПЛА или размеры корпуса посадочной платформы, куда опускается БПЛА без риска задеть или сломать воздушные винты о боковые стенки люка или корпуса посадочной платформы.
Приняты следующие обозначение размеров БПЛА.
S - расстояние между осями двигателей 3 на диагональных лучах 2;
d - диаметр двигателя 3;
D - отметающий диаметр воздушного винта 4;
Q размер стороны квадрата 6.
Размер стороны квадрата 6 равен:
Q=S+D
На фиг. 1б представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4. Позицией 5 обозначены круги, очерчиваемые концами воздушных винтов 4. Угловое положение воздушных винтов 4 не определено и концы их лопастей могут находиться в любой точке круга 5. Позицией 7 обозначен квадрат, стороны которого являются касательными к кругам 5, при этом лучи 2 БПЛА направлены по диагонали квадрата 7. Квадрат 7 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Размер стороны квадрата 7 равен:
Q=0.71S+D
На фиг. 1в представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4. Позицией 5 обозначены круги, очерчиваемые концами воздушных винтов 4. Угловое положение воздушных винтов 4 не определено и концы их лопастей могут находиться в любой точке круга 5. Позицией 8 обозначен круг, являющийся касательными к кругам 5 с наружной стороны. Круг 8 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Диаметр круга 8 равен:
С=S+D,
где С - диаметр круга 8.
На фиг. 2а, представлен вид сверху БПЛА, содержащего фюзеляж 1, шесть лучей 2, двигатели 3 и воздушные винты 4. Позицией 5 обозначены круги, очерчиваемые концами воздушных винтов 4. Угловое положение воздушных винтов 4 не определено и концы их лопастей могут находиться в любой точке круга 5. Позицией 9 обозначен прямоугольник, стороны которого являются касательными к кругам 5. Прямоугольник 9 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА. Размеры сторон прямоугольника 9 равны:
W=S+D
L=0.87S+D,
где W длина короткой стороны прямоугольника 9 (ширина);
L - длина длинной стороны прямоугольника 9 (длина).
На фиг. 2б, представлен вид сверху БПЛА, содержащего фюзеляж 1, шесть лучей 2, двигатели 3 и воздушные винты 4. Позицией 5 обозначены круги, очерчиваемые концами воздушных винтов 4. Угловое положение воздушных винтов 4 не определено и концы их лопастей могут находиться в любой точке круга 5. Позицией 10 обозначен круг, являющийся касательными к кругам 5 с наружной стороны. Круг 10 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Диаметр круга 10 равен:
C=S+D
На фиг. 3а представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4, которые установлены перпендикулярно соответствующим лучам 2. Позицией 11 обозначен квадрат, стороны которого являются касательными к двигателям 3 и расположены параллельно лучам 2. Квадрат 11 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Размер стороны квадрата 11 равен:
Q=S+d
На фиг. 3а также изображен квадрат 7, определенный на фиг. 1а.
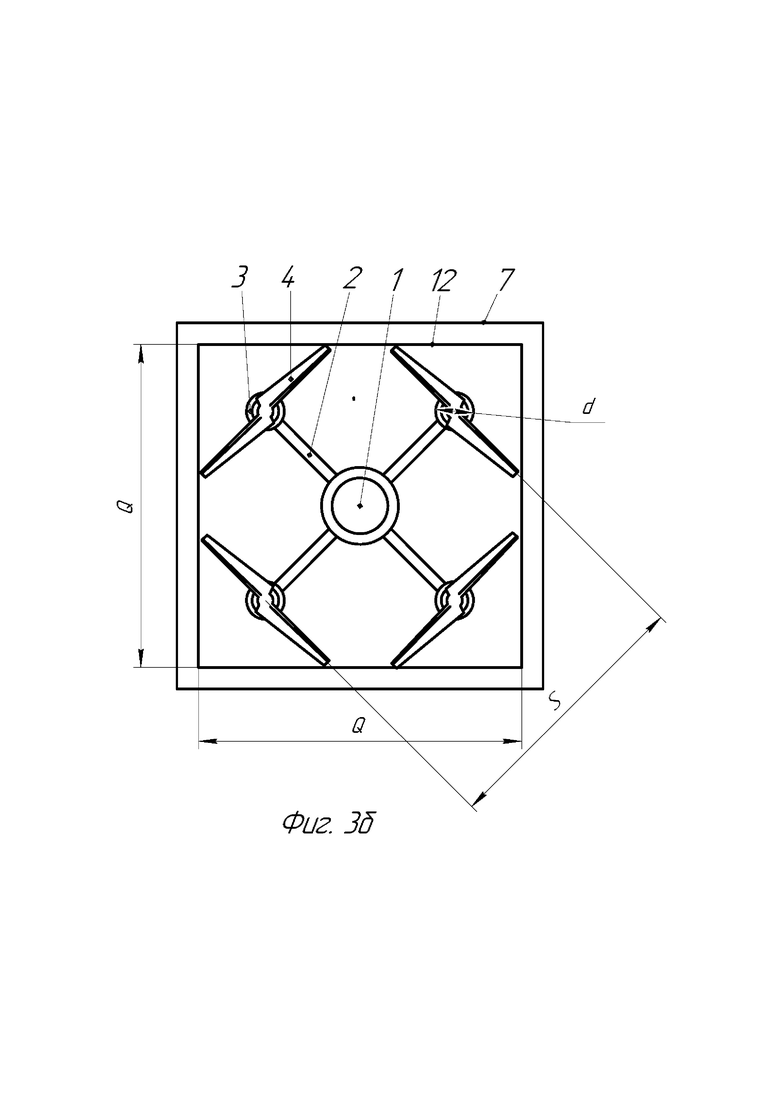
На фиг. 3б представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4, которые установлены перпендикулярно к соответствующим лучам 2. Позицией 12 обозначен квадрат, стороны которого касаются концов воздушных винтов 4. Квадрат 12 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Размер стороны квадрата 12 равны:
Q=0,71(S+D)
На фиг. 3б также обозначен квадрат 7, определенный на фиг. 1б.
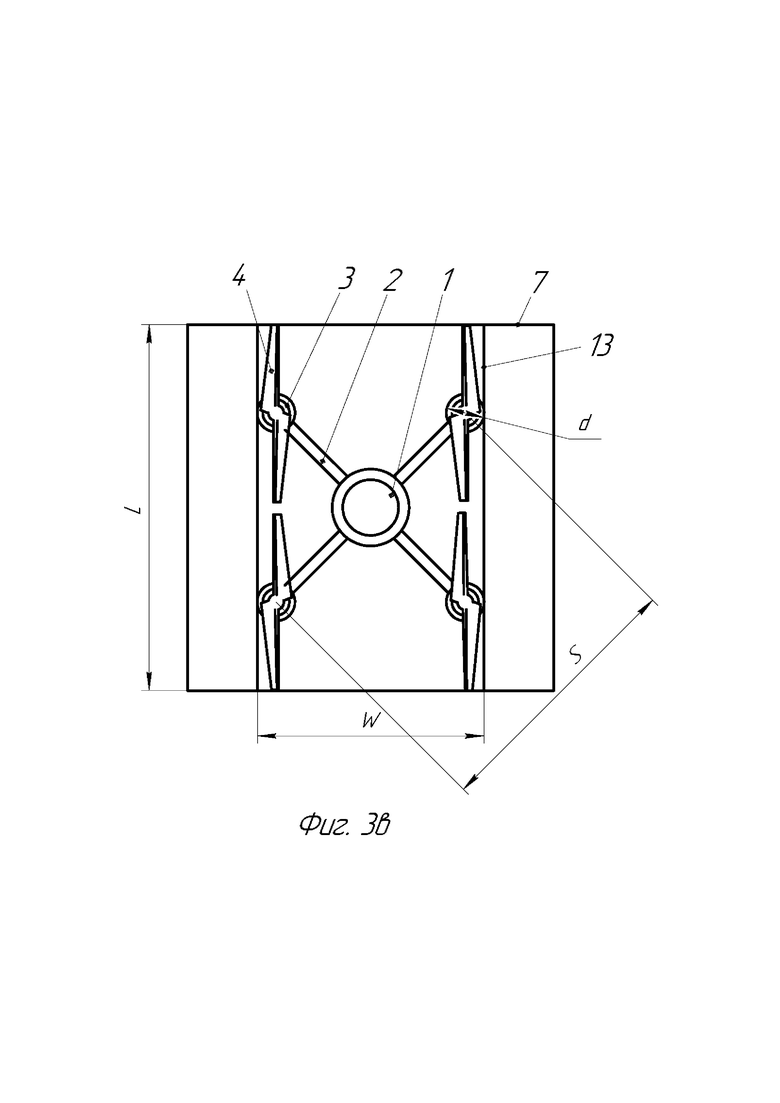
На фиг. 3в, представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4, которые установлены параллельно друг другу под углом 45° к соответствующим лучам 2. Позицией 13 обозначен прямоугольник, две стороны которого являются касательными к двигателям 3, другие две стороны касаются концов воздушных винтов 4. Прямоугольник 13 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА. Размер стороны прямоугольника 12 равны:
W=0.71S+d
L=0,71S+D
На фиг. 3в также обозначен квадрат 7, определенный на фиг.1б.
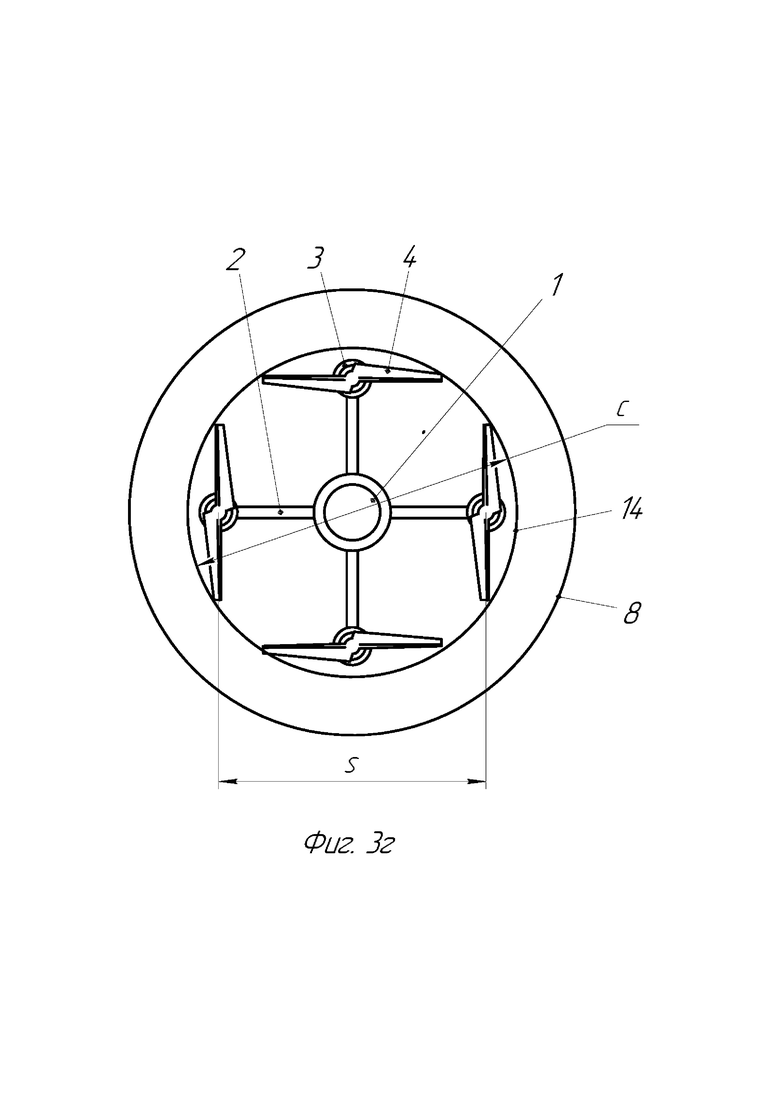
На фиг. 3г, представлен вид сверху БПЛА, содержащего фюзеляж 1, четыре луча 2, двигатели 3 и воздушные винты 4, которые установлены перпендикулярно соответствующим лучам 2. Позицией 14 обозначен круг, который касается концов воздушных винтов 4. Круг 14 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Диаметр круга равен:
На фиг. 3г также обозначен круг 8, определенный на фиг.1в.
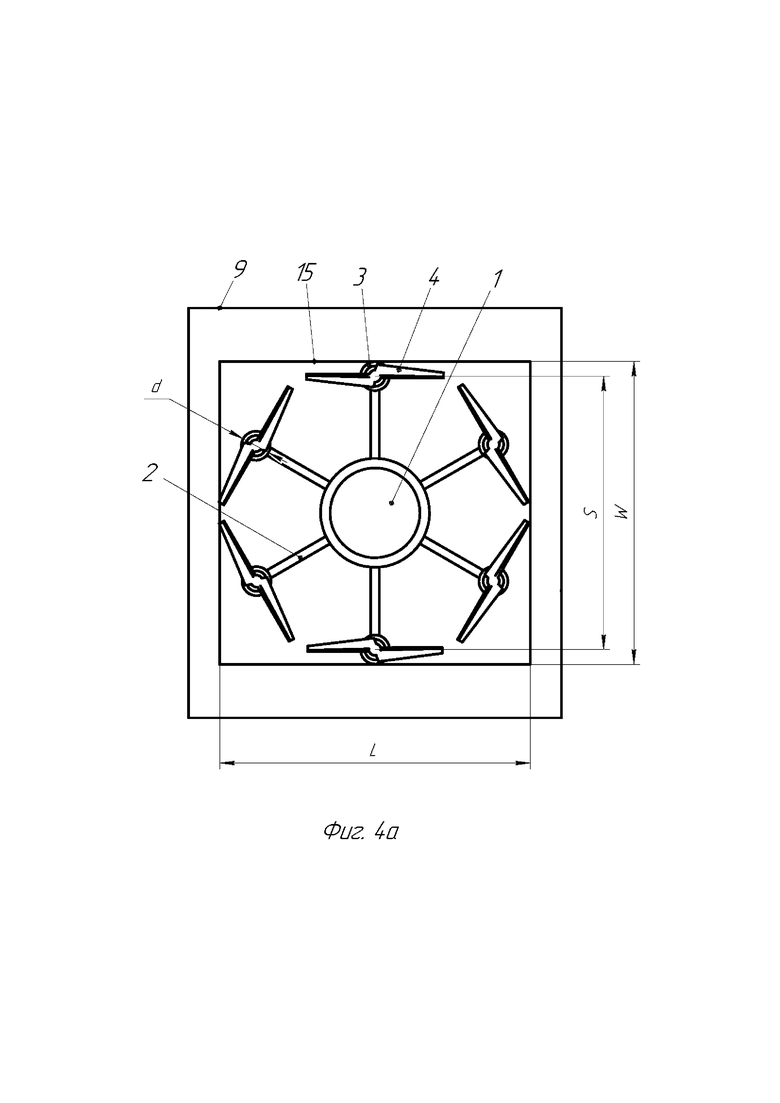
На фиг. 4а, представлен вид сверху БПЛА, содержащего фюзеляж 1, шесть лучей 2, двигатели 3 и воздушные винты 4, которые установлены перпендикулярно соответствующим лучам 2. Позицией 15 обозначен прямоугольник, две стороны которого являются касательными к двигателям 3, две другие стороны задевают концы воздушных винтов 4. Прямоугольник 15 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА. Размеры сторон прямоугольника 15 равны:
W=S+d
L=0.87 S+0.5 D
На фиг. 4a также обозначен прямоугольник 9, определенный на фиг. 2а.
На фиг. 4б, представлен вид сверху БПЛА, содержащего фюзеляж 1, шесть лучей 2, двигатели 3 и воздушные винты 4. Воздушные винты 4 БПЛА установлены параллельно граням (сторонам) охватывающего его многоугольника 16.
Таким образом все воздушные винты 4 установлены параллельно сторонам прямоугольника 16 все стороны которого касаются с двигателями 3. Прямоугольник 16 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Размеры сторон прямоугольника 16 равны:
W=0.87S+d
L=S+d
На фиг. 4а также обозначен прямоугольник 9, определенный на фиг. 2а.
На фиг. 4в, представлен вид сверху БПЛА, содержащего фюзеляж 1, шесть лучей 2, двигатели 3 и воздушные винты 4, которые установлены перпендикулярно соответствующим лучам 2. Круг 17 касается концов воздушных винтов 4. Если при этом двигатели 3 выходят за пределы круга 17 его диаметр должен быть увеличен до касания с корпусом двигателей 3. Круг 17 охватывает БПЛА и определяет его габаритные размеры в проекции на плоскость, на которой стоит БПЛА.
Диаметр круга 17 является наибольшим из значений
C=S+d
На фиг. 4в также обозначен круг 10, определенный на фиг.2б.
Осуществление способа.
Способ приземления БПЛА вертикального взлета и посадки заключается в том, что БПЛА приземляется на посадочную площадку, позиционируется на посадочной площадке и до опускания посадочной площадки с БПЛА в корпус посадочной платформы винты БПЛА устанавливаются таким образом, что БПЛА имеет минимальный габаритный размер в проекции на посадочную площадку. В зависимости от требуемой геометрий люка посадочной платформы ориентирование воздушных винтов 4 может происходить, например, следующим образом.
Воздушные винты 4 БПЛА устанавливаются перпендикулярно лучам 2 БПЛА (фиг. 3а, 3б, 3г, 4а, 4в). Такое решение исключает влияние воздушного винта 4 на габаритный размер БПЛА в направлении луча 2, на который установлен воздушный винт 4 (фиг. 3а, 4в). Особенно эффективно это решение в случае выполнения камеры хранения и/или люка круглым или квадратным (для четырехлучевого БПЛА).
Воздушные винты 4 БПЛА устанавливаются параллельно друг другу (фиг. 3в). Такое решение исключает влияние воздушного винта 4 на габаритный размер БПЛА в направлении перпендикулярном к расположению воздушных винтов 4, но может удлинить в направлении воздушных винтов 4.
Воздушные винты 4 БПЛА устанавливаются параллельно граням многоугольника (фиг. 3а, 4б), в который охватывает БПЛА и куда должна поместиться проекция БПЛА на посадочную площадку. В этом случае исходя из геометрии БПЛА вокруг него рисуется многоугольник (прямоугольник, квадрат, шестигранник и т.п.) и воздушные винты 4 устанавливаются параллельно разным граням многоугольника.
Устройство многовинтового БПЛА вертикального взлета и посадки.
Многовинтовой БПЛА вертикального взлета и посадки, способный реализовать заявляемый способ посадки может быть собран с применением технических решении, известных из уровня техники. Ими могут быть применение двигателя вращения воздушного винта с датчиком угла поворота вала двигателя и тормозом (сервомотор), могут быть установлены устройства, обеспечивающие поворот и фиксацию воздушного винта на заданном угле поворота вала и т.д.
Многовинтовой БПЛА вертикального взлета и посадки (фиг. 5) содержит корпус 1, лучи 2, на которых установлены двигатели 3 с воздушными винтами 4 и шасси 18. Кроме того БПЛА содержит полетный контроллер, аккумулятор, датчики (не показаны на фиг. 5).
На вал 19 двигателя 3 (фиг. 6) установлены датчик 20 угла поворота вала 19 двигателя 3 и тормоз 21, которые могут быть встроены в двигатель 3. Датчик 20 угла поворота может быть выполнен, например, в виде энкодера, вращающегося трансформатора и т.п.
Вместо датчик 20 угла поворота вала 19 может быть установлен датчик углового положения вала 19 двигателя 3, который может быть представлен, например, виде установленного на вале 19 двигателя 3 диска 22 с отверстиями 23, выполненными на заданных углах и щелевого оптического датчика 24, состоящего из фотодиода, светодиода и схемы которая формирует выходной сигнал (не показаны); или (фиг. 8) установленного на валу 19 двигателя 3 диска 25, на котором на заданных углах размещены миниатюрные магниты 26 и установленного датчика Холла 27, и т.п.
Тормоз 21 может быть любой тормоз из текущего уровня техники. Момент торможения тормоза 21 может быть ниже момента вращения двигателя 3.
БПЛА может содержать устройство поворота и фиксации воздушного винта 4 на заданном угле поворота вала 19, которое может быть выполнено в виде следующих конструкции.
На вал 19 (фиг. 9) двигателя 3 насажен диск 27 с секторами 28 на заданных углах, на корпусе двигателя 3 или на луче 2 установлен толкатель 29 с фиксирующим штырем 30. Толкатель может быть выполнен в виде электромагнита, актуатора или другого механизма, обеспечивающего линейное движение толкателя.
На вал 19 (фиг. 10) двигателя 3 установлена ступица 31, на которую радиально установлены штыри 32 из магнитного материала или магнита, на корпусе двигателя 3 или на луче 2 установлен толкатель 33 на подвижный шток 34 установлен магнит 35 или шток 34 выполнен из магнитного материала, причем если магниты 35 установлены и на концы штырей 32 и шток 34 они должны быть установлены противоположными полюсами друг другу.
На вал 19 двигателя 3 может быть установлена полумуфта для взаимодействия с устройством поворота и удержания воздушных винтов 4 БПЛА 40, расположенных на посадочной площадке.
Устройство посадочной платформы.
Посадочная платформа фиг 11а и 11б содержит корпус 35 с люком 36 и крышками 37 люка, посадочную площадку 38 с устройством 39 позиционирования БПЛА. БПЛА 40 позиционирован на посадочной площадке 38 таким образом, что лучи 2 расположены параллельно сторонам люка 36. Воздушные винты 4 установлены перпендикулярно соответствующим лучам 2. Размер люка 36 определен в соответствии с фиг. 3а и выполнен несколько больше квадрата 11. Внутренний размер корпуса 35 посадочной платформы выполнен по размеру люка 36 или несколько больше, что определяется необходимостью размещения в нем помимо посадочной площадки 38 с БПЛА 40 других необходимых устройств.
Посадочная платформа фиг 12а и 12б содержит корпус 35 с люком 36 и крышками 37 люка, посадочную площадку 38 с устройством 39 позиционирования БПЛА 40. БПЛА 40 позиционирован на посадочной площадке 38 таким образом, что лучи 2 расположены диагонально сторон люка 36. Воздушные винты 4 установлены параллельно друг другу и под углом 45 градусов к лучам 2. Размер люка 28 определен в соответствии с фиг. 3в и выполнен несколько больше прямоугольника 13. Внутренний размер корпуса 35 посадочной платформы выполнен по размеру люка 36 или несколько больше, что определяется необходимостью размещения в нем помимо посадочной площадки 38 с БПЛА 40 других необходимых устройств.
Посадочная платформа фиг 13 содержит корпус 35 с люком 36 и крышками 37 люка, посадочную площадку 38 с устройством 39 позиционирования БПЛА 40. БПЛА 40 с шестью лучами 2 позиционирован на посадочной площадке 38. Воздушные винты 4 установлены перпендикулярно соответствующим лучам 2. Размер люка 28 определен в соответствии с фиг. 4а и выполнен несколько больше прямоугольника 15. Внутренний размер корпуса 35 посадочной платформы выполнен по размеру люка 36 или несколько больше, что определяется необходимостью размещения в нем помимо посадочной площадки 38 с БПЛА 40 других необходимых устройств.
Посадочная платформа фиг. 14 содержит корпус 35 с люком 36 и крышками 37 люка, посадочную площадку 38 с устройством 39 позиционирования БПЛА 40. БПЛА 40 с шестью лучами 2 позиционирован на посадочной площадке 38. Воздушные винты 4 установлены параллельно сторон люка 36. Размер люка 36 определен в соответствии с фиг.46 и выполнен несколько больше прямоугольника 16. Внутренний размер корпуса 35 посадочной платформы выполнен по размеру люка 36 или несколько больше, что определяется необходимостью размещения в нем помимо посадочной площадки 38 с БПЛА 40 других необходимых устройств.
Посадочная платформа фиг 15 содержит корпус 35 с люком 36 и крышками 37 люка, посадочную площадку 38 с устройством 39 позиционирования БПЛА 40. БПЛА 40 с шестью лучами 2 позиционирован на посадочной площадке 38. Воздушные винты 4 установлены перпендикулярно соответствующих лучей 2. Люк 36 выполнен круглым, диаметр люка 36 определен в соответствии с фиг. 4в и выполнен несколько больше диаметра круга 17. Внутренний размер корпуса 35 посадочной платформы выполнен по размеру люка 36 или несколько больше, что определяется необходимостью размещения в нем помимо посадочной площадки 38 других необходимых устройств.
Посадочная платформа может содержать устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40. Устройства 41 поворота и удержания воздушного винта устанавливается на посадочную площадку 38 по местам расположения каждого двигателя 3 БПЛА 40 после приземления и позиционирования (фиг. 16а, 16б)
Устройство 41 поворота и удержания воздушных винтов 4 БПЛА 40 вариант исполнения фиг. 17а выполнено в виде выдвижного штока 42 на конце которого установлена полу муфтой 43 а. Вторая полу муфта 436 насаживается на вал 19 двигателя 3 БПЛА 40. Шток 42 выдвигается с помощью линейного привода 44 и не вращается.
Обе полумуфты 43а и 43б фиг. 17б выполнены одинаковыми и содержат цилиндрический корпус 45 из немагнитного материала, на котором установлено два магнита 46, причем магниты на каждой полумуфте 43а и 43б установлены разными полярностями к поверхности корпуса 44.
Полумуфта 43а фиг. 17в выполнена в виде цилиндрического корпуса с призматическим углублением 47, рассекающим корпус поперек оси вращения, а полумуфта 43б выполнена в виде цилиндрического корпуса и установленной поперек оси вращения выступающей призмы 48 таким образом, что при соединении полумуфт они ориентированы друг относительно друга.
Устройство 41 поворота и удержания воздушных винтов 4 БПЛА 40 вариант исполнения фиг. 18 может быть выполнено в виде выдвижного штока 42 на конце которого установлен двигатель 49 с насаженной на вал 50 полумуфтой 43а. Вторая полумуфта 436 насажена на вал 19 двигателя 3 БПЛА 40. Шток 42 выдвигается с помощью линейного привода 44.
Полумуфты 43а и 436 являются частями муфты вращения, обеспечивающими необходимое вращение вала 19 двигателя 3 для ориентации и удержания воздушных винтов 4. Муфта компенсирует несоосность расположения вала19 двигателя 3 и вала 50 двигателя 49 и иметь возможность стыковаться в случае их несоосности. В частности, ими могут быть муфта, составленная из полумуфт 43а, 436 фиг.176, муфта варианта исполнения фиг. 17в и т.п.
Устройство 41 поворота и удержания воздушных винтов 4 вариант исполнения фиг. 19а, 19б содержит поворотный рычаг 51, на котором расположено мотор-колесо 52. Рычаг 51 установлен на ось 53, поворачивается с помощью актуатора 54 линейного перемещения и прижимает к корпусу двигателя 3 БПЛА 40 мотор-колесо 52. Данное устройство работает с БПЛА 40, двигатели 3 которого имеют внешний ротор.
Мотор-колесо 52 может быть заменено на мотор с установленным на его вал колесом (не показано).
Описание осуществления способа приземления многовинтового БПЛА вертикального взлета и посадки.
Способ приземления многовинтового БПЛА 40 вертикального взлета и посадки при котором БПЛА 40 приземляется на посадочную площадку 38, позиционируется на посадочной площадке 38 и до опускания посадочной площадки 38 с БПЛА 40 в корпус 35 посадочной платформы винты 4 БПЛА 40 устанавливаются таким образом, что БПЛА 40 имеет минимальный габаритный размер в проекции на посадочную площадку 38 а затем посадочная площадка 38 опускается в корпус 35 посадочной платформы и закрывается 37 люком, реализуется следующим образом.
БПЛА 40 подлетает к месту посадки, ориентируясь по спутниковой навигации или показания собственной инерционной навигации. Далее производится определение точного места посадки и посадка БПЛА 40 на посадочную площадку 38, ориентируясь изображению посадочной площадки, графического маркера, изображенного на поверхности посадочной платформы или источника излучения, установленного на посадочной платформе (не показаны). Точность посадки БПЛА 40 определяется методом определения места посадки, динамическими характеристиками БПЛА 40, условиями освещенности, метеорологическими условиями посадки, особенно порывистым ветром и видимостью.
В зависимости от типа устройства 39 позиционирования БПЛА 40 на посадочной площадке 38 позиционирование БПЛА 40 производится в процессе приземления (устройства позиционирования гравитационного типа) или после приземления (активные устройства позиционирования).
До опускания посадочной площадки 38 с БПЛА 40 в корпус 35 посадочной платформы, т.е. процессе позиционирования или после него воздушные винты 4 БПЛА 40 устанавливаются таким образом, что БПЛА 40 имеет минимальный габаритный размер в проекции на посадочную площадку 38.
В зависимости от того, какова геометрическая форма внутреннего объема посадочной платформы для хранения БПЛА 40 и/или люка 36 посадочной платформы воздушные винты 4 могут быть установлены следующим образом.
Воздушные винты 4 БПЛА 40 устанавливаются перпендикулярно лучам 2 БПЛА 40 (фиг. 3а, 3б, 3г, 4а, 4в).
В случае размещения четырехлучевого БПЛА 40, при котором лучи 2 расположены параллельно сторонам посадочной площадки 38 или люка 37 (фиг. 3а) размер квадрата 11, куда помещается БПЛА 40 с установленными перпендикулярно лучам 2 воздушными винтами 4 уменьшается до 0.68 стороны квадрата 6, которая необходима в случае, если воздушные винты 4 останавливаются случайно. При этом площадь квадрата 11 составляет 0.48 площади квадрата 6.
В случае размещения четырехлучевого БПЛА 40, при котором лучи 2 расположены по диагонали посадочной площадки 38 или люка 37 (фиг. 3б) размер квадрата 12, куда помещается БПЛА 40 с установленными перпендикулярно лучам 2 воздушными винтами 4 уменьшается до 0.88 стороны квадрата 7, которая необходима в случае, если воздушные винты 4 останавливаются случайно. При этом площадь квадрата 12 составляет 0.77 площади квадрата 7.
В случае размещения четырехлучевого БПЛА 40 на круглой посадочной площадке 38 или люка 37 круглого сечения (фиг. 3г) размер круга 14, куда помещается БПЛА 40 с установленными перпендикулярно лучам 2 воздушными винтами 4 уменьшается до 0,74 круга 8, которая необходима в случае, если воздушные винты 2 останавливаются случайно. При этом площадь круга 14 составляет 0.55 площади круга 8.
В случае размещения шестилучевого БПЛА 40, на прямоугольной посадочной площадке 38 или наличии прямоугольного люка 37 (фиг. 4а) размер сторон прямоугольника 15, куда помещается БПЛА 40 с установленными перпендикулярно лучам воздушными винтами 4 уменьшается до 0.84 и 0.81 стороны квадрата 9 соответственно, которая необходима в случае, если воздушные винты 2 останавливаются случайно. При этом площадь квадрата 15 составляет 0.68 площади квадрата 9.
В случае размещения шестилучевого БПЛА 40 на круглой посадочной площадке 38 или наличии круглого люка 37 (фиг. 4в) диаметр круга 17, куда помещается БПЛА 40 с установленными перпендикулярно лучам 2 воздушными винтами 4 уменьшается до 0.76 от диаметра круга 10, которая необходима в случае, если воздушные винты останавливаются случайно. При этом площадь круга 17 составляет 0.57 площади круга 10.
Воздушные винты 4 БПЛА 40 устанавливаются параллельно друг другу (фиг. 3в).
В таком случае размещения четырехлучевого БПЛА 40 на прямоугольной посадочной площадке 38 или при наличии прямоугольного люка 37 (фиг. 3в) размер прямоугольника 13 куда помещается БПЛА 40 с установленными параллельно друг другу воздушными винтами 4 малая сторона прямоугольника 13 составляет 0.62 стороны квадрата 7. При этом площадь прямоугольника 12 составляет 0.62 площади квадрата 7.
Воздушные винты 4 БПЛА 40 устанавливаются параллельно граням многоугольника (фиг. 3а, 4б), в который должна поместиться проекция БПЛА 40 на посадочную площадку 38.
При этом вариант расположение БПЛА 40 согласно фиг. 3а является одновременно вариантом размещения четырехлучевого БПЛА, при котором лучи 2 расположены параллельно сторонам посадочной площадки 38 или люка 36.
В случае размещения шестилучевого БПЛА 40 на прямоугольной посадочной площадке 38 или при наличии прямоугольного люка 37, два воздушных винта 4 установлены параллельно коротким сторонам прямоугольника 16, а четыре воздушных винта 4 расположены параллельно длинной стороне. Стороны прямоугольника 16 будут составлять 0.74 и 0.84 сторон прямоугольника 9, соответственно площадь прямоугольника 16 составит 0.62 площади прямоугольника 9.
Возможны другие эквивалентные варианты установки воздушных винтов БПЛА 40, при которых БПЛА 40 имеет минимальный габаритный размер в проекции на посадочную площадку.
Указанные соотношения размеров и площадей БПЛА 40 в проекции на посадочную площадку 38, которые определяют размеры люков 36 соответствуют принятым на фиг. 1-4 соотношениям размеров БПЛА 40. Для конкретных размеров используемых БПЛА 40 указанные соотношения будут отличаться от приведенных.
При приземлении БПЛА 40 на различные посадочные платформы в каждом случае воздушные винты 4 БПЛА 40 могут устанавливаться различным, соответствующим требованиям данной посадочной платформы образом.
После того, как воздушные винты 4 БПЛА 40 устанавливаются таким образом, что БПЛА 40 имеет минимальный габаритный размер в проекции на посадочную площадку 38, посадочная площадка 38 опускается в корпус 35 посадочной платформы и закрывается крышкой 37 (крышками) люка 36. При этом воздушные винты 4 гарантированно не задевают стенок люка 36.
Таким образом, способ приземления БПЛА 40 вертикального взлета и посадка при котором БПЛА 40 приземляется, позиционируется и до опускания посадочной площадки 38 с БПЛА 4 в корпус посадочной платформы устанавливает воздушные винты 4 таким образом, что имеет минимальный габаритный размер в проекции на посадочную площадку 38 позволяет уменьшить размеры посадочной платформы, его вес и размеры люка 36 для опускания посадочной площадки 38 с БПЛА 40 внутрь посадочной платформы, что позволяет также снизить воздействие неблагоприятных внешних факторов (дождь, снег, пыль) на работу посадочной платформы.
Работа многовинтового БПЛА вертикального взлета и посадки.
Многовинтовой БПЛА 40 вертикального взлета и посадки (фиг. 5) с датчиком угла поворота 20 (фиг.6) и тормозом 21 работает следующим образом.
БПЛА 40 подлетает к месту посадки, производит определение точного места посадки и посадку. Полетный контроллер осуществляет управление работой БПЛА 40, каждый двигатель 3 вращает свой воздушный винт 4 с требуемой скоростью, которую задает полетный контроллер. После посадки двигатели 3 выключаются.
В зависимости от того, какого типа устройство 39 позиционирования установлено на посадочную платформу позиционирование БПЛА 40 производится в момент приземления, если установлено устройство позиционирования 39 гравитационного типа или после посадки в случае использования устройства позиционирования 39 активного типа.
До опускания посадочной площадки 38 с БПЛА 40 в корпус посадочной платформы БПЛА 40 устанавливает воздушные винты 4 таким образом, чтобы БПЛА 40 имел минимальный габаритный размер в проекции на посадочную площадку 38. Для каждого типа посадочной платформы принято свое расположение каждого воздушного винта 4.
БПЛА 40 с двигателем 3, датчиком угла положения 20 и тормозом 21, вариант исполнения фиг.6 определяет положение каждого воздушного винта 4 по датчику 20 угла положения вала 19 и тормозит вал 19 двигателя 4 на заданном угле поворота вала 19 с помощью тормоза 21. Учитывая, что торможение происходит на выбеге двигателя 4 после прекращения подачи питания, тормоз 21 может иметь меньший момент торможения, чем момент вращения двигателя 3.
В другом варианте исполнения многовинтовой БПЛА 40 вертикального взлета и посадки работает следующим образом.
БПЛА 40, в котором установлен датчик углового положения вала 19 двигателя 3, который представлен в виде установленного на вале 19 двигателя 3 диска 22 с отверстиями 23, выполненными на заданных углах и щелевого оптического датчика 24 (фиг. 7) или установленного на валу 19 двигателя 3 диске 24 на котором на заданных углах размещены миниатюрные магниты 26 и установленного датчика Холла 27 (фиг. 8), торможение двигателя 3 производится по показанию датчика углового положения. В этом варианте положение воздушных винтов 4 определяется положением диска 22 на валу 19 двигателя 3. Такая конструкция может быть перепрограммирована на другую посадочную платформу с другими углами установки воздушных винтов 4 механическим путем.
В варианте исполнения БПЛА 40, которое содержит устройство поворота и фиксации воздушного винта на заданном угле поворота вала 19 двигателя, 3 фиг. 9, после выключения двигателя 3 включается толкатель 29, который выдвигает фиксирующий штырь 30 и он, взаимодействуя с сектором 28 диска 27 поворачивает и устанавливает воздушный винт 4 в требуемое положение.
В варианте исполнения БПЛА 40, которое содержит устройство поворота и фиксации воздушного винта 4 на заданном угле поворота вала фиг.10 после выключения двигателя 3 включается толкатель 33, который выдвигает шток 34 с магнитом 35 на конце. При вращении вала двигателя ступица 31 поворачивает штыри 32 из магнитного материала и при прохождении их мимо магнитов 35 они притягиваются к ним и останавливают вал 19 двигателя 3. При этом воздушный винт 4 останавливается в требуемом положение и удерживается до тех про, пока шток 25 выдвинут.
Далее при опускании посадочной площадки 38 в корпус 35 посадочной платформы, при хранении и при новом подъеме посадочной площадки 38 для взлета БПЛА 40 воздушный винт 4 остается зафиксированным в заданном положении. Это обеспечивает то, что при опускании и поднимании посадочной площадки 38 БПЛА 40 не заденет краев люка 36.
Работа БПЛА при взлете.
При взлете БПЛА 40 с двигателем 3 варианты исполнения фиг. 6, фиг. 7 и фиг. 8 отпускает тормоз 21 и запускает двигатель 3, который вращается свободно; БПЛА с устройством поворота и фиксации воздушного винта на заданном угле поворота вала 19 фиг.9 толкатель 29 задвигает фиксирующий штырь 30, который освобождает сектор 28 и диск получает свободу вращения; БПЛА 40 в устройстве поворота и фиксации воздушного винта 4 на заданном угле поворота вала 19 фиг. 10 толкатель 33 задвигает шток 34 с магнитом 35 на конце. При этом магнит 35 отдаляется от штыря 32 и вал 19 двигателя 3 получает возможность свободного вращения.
БПЛА 40 запускает вращение двигателей 3 и взлетает под управлением полетного контроллера.
Работа посадочной платформы.
Посадочная платформа фиг. 11а, 11б, 12а, 12б, 13, 14, 15 работают с БПЛА 40, которые имеют тормоз 21 вала 19 двигателя 3 или содержат устройства поворота и фиксации воздушного винта на заданном угле поворота вала фиг. 8 и фиг. 10.
Работа происходит следующим образом.
В исходном положении посадочная площадка 38 находится корпусе 35 в нижнем положении. Крышки 37 люка 36 закрыты. БПЛА 40 находится на посадочной площадке 38, позиционировано, воздушные винты 4 установлены и зафиксированы в требуемом положении.
Перед взлетом БПЛА 40 открываются крышки 37 люка 36 и посадочная площадка 38 поднимается в верхнее положение. При подъеме посадочной площадки 38 воздушные винты 4 остаются зафиксированными в требуемом положении и БПЛА 40 проходит люк, не задевая его кромок.
После взлета БПЛА 40 посадочная платформа опускает посадочную площадку 38 в нижнее положение и закрывает крышки 37 люка 36.
При посадке БПЛА 40 посадочная платформа открывает крышки 37 люка 36 и поднимает посадочную площадку 38 в верхнее положение. Также могут включаться посадочные огни. БПЛА 40 приземляется на посадочную площадку 38 и позиционируется. В посадочных платформах фиг. 11а, 11б, 12а, 12б, 13, 14, 15 применено устройство позиционирования 39 гравитационного типа, которые выполнены в виде конической воронки. В связи с этим сразу после приземления БПЛА 40 оказывается позиционированным. Затем БПЛА 40 устанавливает воздушные винты 4 таким образом, чтобы БПЛА 40 имел минимальный габаритный размер в проекции на посадочную площадку 38. Причем расположение воздушных винтов 4 для данной посадочной платформы известно. Затем посадочная платформа опускает посадочную площадку 38 с БПЛА 40 в нижнее положение и закрывает крышки 33 люка 36. Благодаря тому, что воздушные винты 4 БПЛА 40 установлены заданным образом они не задевают кромки люка 36.
Посадочная платформа вариант исполнения фиг.16а, 16б и посадочная платформа с посадочной площадкой фиг.19а и 19б предназначены для БПЛА 40, которые содержат установленные на валах 19 двигателя 3 БПЛА 40 магнитные полумуфты 436 (фиг. 17а), полумуфты 43б выполненные в виде цилиндрического корпуса и установленной поперек оси вращения выступающей призмы 48 (фиг. 17в) или БПЛА 40 содержит двигатели 3 с внешним ротором.
В других вариантах исполнения посадочной платформы работа происходит следующим образом.
В исходном положении посадочная площадка находится в корпусе 35 в нижнем положении. Крышки 37 люка 36 закрыты. БПЛА 40 находится на посадочной площадке 38.
Выдвижные штока 42 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 17а) с установленными полумуфтой 43а подняты в верхнее положение и взаимодействуют с со второй полумуфтой 436 которая насажена на вал 19 двигателя 3 БПЛА 40. Это обеспечивает нужное положение и фиксацию воздушных винтов 4 в требуемом положении.
Выдвижные штока 42 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 18) с установленными двигателями 49 с насаженной на вал 50 полумуфтами 43а, подняты в верхнее положение и взаимодействуют со вторая полумуфта 436, которая насажена на вал 19 двигателя 3 БПЛА 40. Вал 50 двигателя 49 ориентирован и заторможен таким образом, чтобы обеспечить нужное положение и фиксацию воздушных винтов 4 в требуемом положении.
Поворотный рычаг 51 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 19), прижимает установленное на него мотор-колесо 52 к корпусу двигателя 3 БПЛА 40 с помощью актуатора 54 у которого выдвинут шток. Мотор колесо 52 своим вращением вращает воздушный винт 4 и останавливает его в требуемом положении. Мотор колесо 52 заторможено и не позволяет воздушному винту 4 проворачиваться.
Перед взлетом БПЛА 40 открываются крышки 37 люка 36, и посадочная площадка 38 поднимается в верхнее положение. При подъеме посадочной площадки 38 воздушные винты 4 остаются зафиксированными в требуемом положении.
После подъема посадочной площадки:
Выдвижные штока 42 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 17а) с установленными полумуфтой 43а опускаются вниз, разъединяя полумуфты 43а и 436 и освобождают тем самым вал 19 двигателя 3 для вращения.
Выдвижные штока 42 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 18) с установленными двигателями 49 с насаженной на вал 50 полумуфтами 43а опускаются вниз, разъединяя полумуфты 43а и 436 и освобождают тем самым вал 19 двигателя 3 для вращения.
Поворотный рычаг 51 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 19), отходит от двигателя отпуская установленное на него мотор-колесо 52 от корпусу двигателя 3 БПЛА 40 с помощью актуатора 54, задвинув шток. Мотор 3 БПЛА 40 освобождается от мотор-колеса 52 и получает свободу вращения.
После взлета БПЛА 40 посадочная платформа опускает посадочную площадку 38 в нижнее положение и закрывает крышки 33 люка 36. При этом в варианте фиг. 19а, 19б поворотный рычаг 51 поворачивается таким образом, чтобы мотор-колесо 53 не выходило за габарит посадочной площадки.
При посадке БПЛА 40 посадочная платформа открывает крышки 37 люка 36 и поднимает посадочную площадку 38 в верхнее положение. При этом в варианте фиг. 19а, 19б поворотный рычаг 51 раздвигает, чтобы мотор-колесо, чтобы он не мешал БПЛА при посадке.
Также могут включаться посадочные огни. БПЛА 40 приземляется на посадочную площадку 38 и позиционируется. В посадочных платформах фиг. 16а, 16б, 19а, 19б применено устройство позиционирования гравитационного типа, которые выполнены в виде V-образных направляющих.
В связи с этим сразу после приземления БПЛА 40 оказывается позиционированным.
Устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 устанавливает воздушные винты 4 таким образом, что БПЛА имеет минимальный габаритный размер в проекции на посадочную площадку 38. Причем форма расположения воздушных винтов 4 для данной посадочной платформы известна.
Для чего:
Выдвижные штока 42 устройств 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 17а) с установленными полумуфтой 43а поднимаются в верхнее положение соединяя полумуфты 43а и 43б и ориентируя вал 19 двигателя 3 в заданное положение;
Выдвижные штока 42 устройств 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 18) с установленными двигателями 49 с насаженной на вал 50 полумуфтами 43а поднимаются в верхнее положение соединяя полумуфты 43а и 43б, установленным на вал 19 двигателя 3 на БПЛА 40 и затем двигатель 49 вращает вал 50 поворачивая воздушный винт 4 в заданное положение;
Поворотный рычаг 51 устройства 41 поворота и удержания воздушных винтов 4 БПЛА 40 (фиг. 19), прижимает мотор-колесо 52 от корпусу двигателя 3 БПЛА 40 с помощью актуатора 54. Мотор-колесо 52 вращает двигатель 3 и поворачивает воздушные винты 4 в требуемое положение.
Затем посадочная платформа опускает посадочную площадку 38 в нижнее положение и закрывает крышки 33 люка 36. Благодаря тому, что воздушные винты 4 БПЛА 40 установлены заданным образом они не задевают кромки люка 36.
Таким образом, принятые технические решения группы изобретений позволяют уменьшить размеры посадочной платформы, что позволяет снизит вес конструкции, потребляемую мощность, а также снизит влияние внешних факторов (дождь, снег, пыль) на работу посадочной платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Посадочная платформа для беспилотного летательного аппарата | 2019 |
|
RU2710887C1 |
| Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем (варианты) | 2022 |
|
RU2788099C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |

Изобретение относится к области авиации, в частности к способам эксплуатации беспилотных летательных аппаратов и конструкциям посадочных платформ. Способ приземления многовинтового БПЛА вертикального взлета и посадки включает приземление БПЛА на посадочную площадку, установку винтов БПЛА таким образом, чтобы БПЛА имел минимальный габаритный размер в проекции на посадочную площадку, опускание посадочной площадки с БПЛА в корпус посадочной платформы. БПЛА вертикального взлета и посадки содержит датчик угла поворота воздушного винта, тормоз вала двигателя, которые могут быть встроены в двигатель. Посадочная платформа содержит устройство поворота и удержания воздушных винтов БПЛА. Обеспечивается уменьшение размеров и веса посадочной платформы для приема и хранения БПЛА вертикального взлета и посадки. 2 н. и 3 з.п. ф-лы, 33 ил.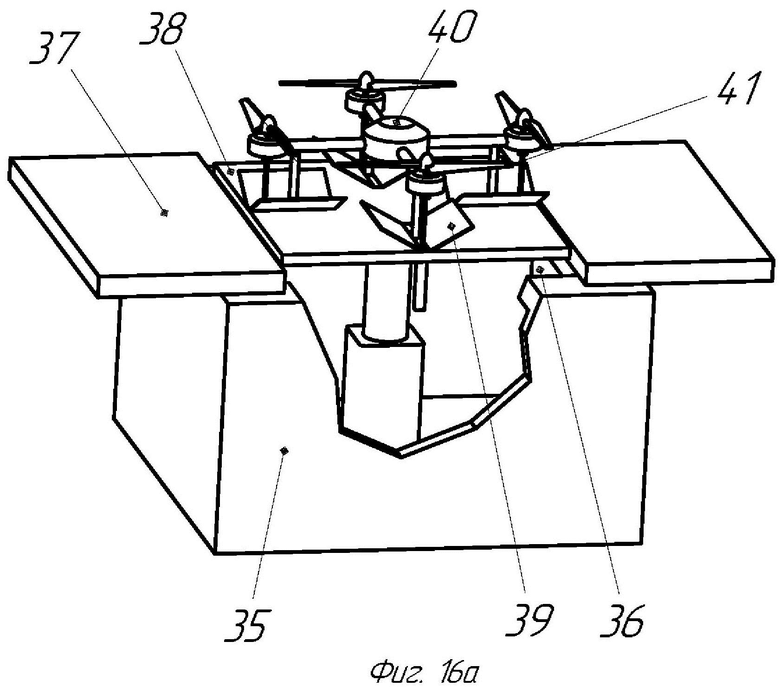
1. Способ приземления многовинтового БПЛА вертикального взлета и посадки, при котором БПЛА приземляется на посадочную площадку, позиционируется на посадочной площадке, после чего посадочная площадка опускается в корпус посадочной платформы и закрывается люком, отличающийся тем, что до опускания посадочной площадки с БПЛА в корпус посадочной платформы винты БПЛА устанавливаются таким образом, что БПЛА имеет минимальный габаритный размер в проекции на посадочную площадку.
2. Способ по п.1, отличающийся тем, что воздушные винты БПЛА устанавливаются перпендикулярно лучам БПЛА.
3. Способ по п.1, отличающийся тем, что воздушные винты БПЛА устанавливаются параллельно друг другу.
4. Способ по п.1, отличающийся тем, что воздушные винты БПЛА устанавливаются параллельно граням охватывающего его многоугольника.
5. Посадочная платформа, содержащая корпус с люком и крышками люка, посадочную площадку с устройством позиционирования БПЛА после приземления, отличающаяся тем, что содержит устройство поворота и удержания воздушных винтов БПЛА.
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| 0 |
|
SU158075A1 | |
| Сборник информации о двигателях "Все о двигателе", статья "Асинхронный двигатель с тормозом, принцип работы", найдено в интернет он-лайн, URL: https://avtika.ru/asinkhronnyy-dvigatel-s-tormozom-printsip-raboty/, последнее обновление 02.11.2020 | |||
| Статья "Датчики, элементы измерения и контроля", | |||

