Перекрестная ссылка на родственные заявки
В этой продолжающейся заявке на патент испрашивается приоритет и все преимущества по заявке на патент США № 62/312001, поданной 23.03.2016, которая включена в данный документ в полном объеме посредством ссылки.
Уровень техники
Известные двухколесные электрические транспортные средства, такие как, например, гироскутеры и Segway PT, представляют собой проблему для пользователей с точки зрения транспортировки по причине их массы и объема, когда они не используются, что уменьшает их практичность и привлекательность для пользователей и потенциальных пользователей.
Краткое описание графических материалов
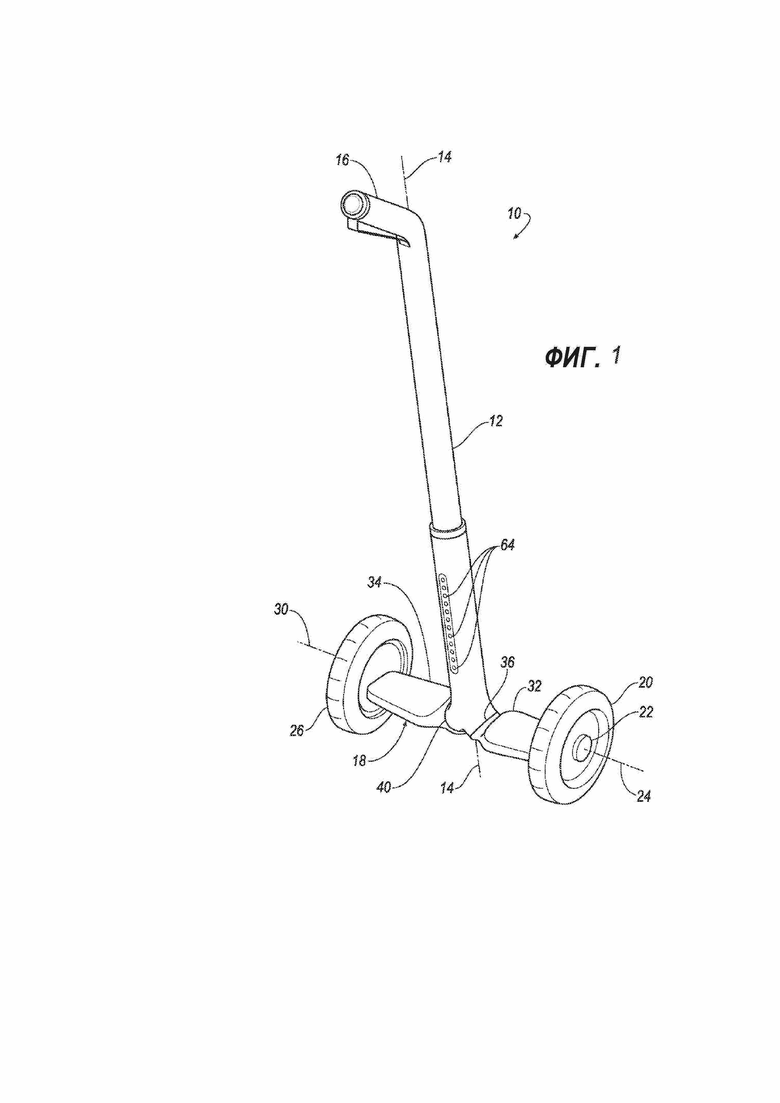
Фиг. 1 представляет собой вид в перспективе типового электрического транспортного средства с колесами в развернутом положении.
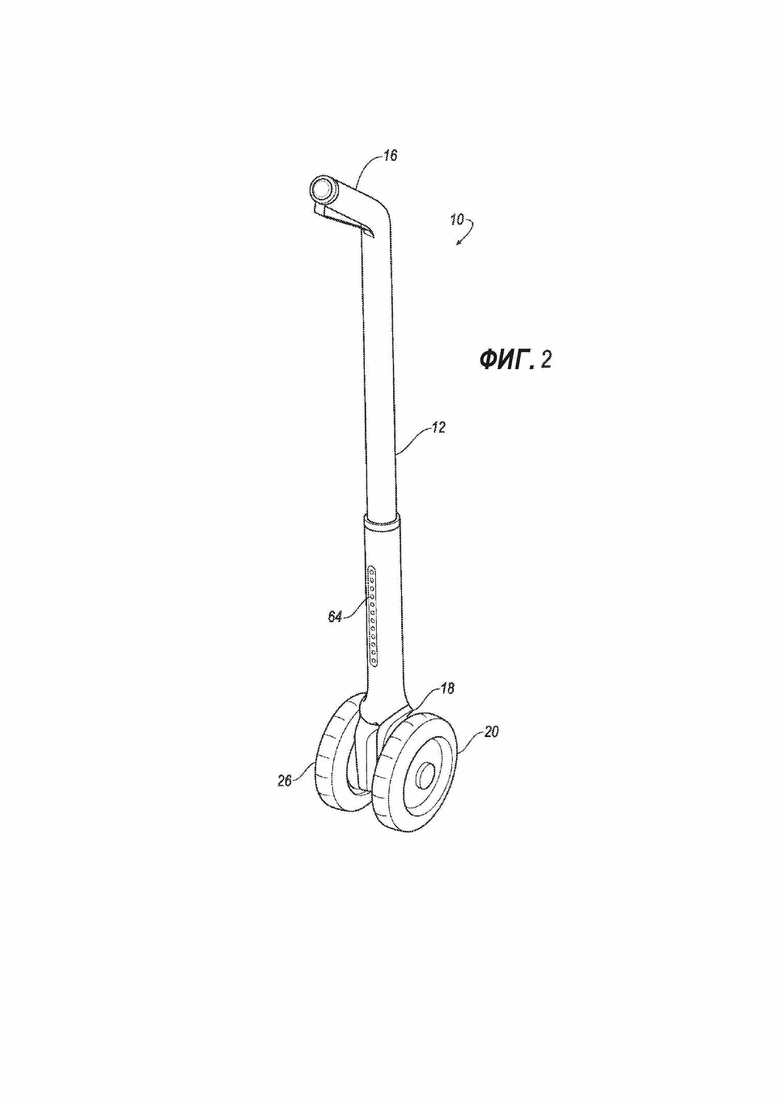
Фиг. 2 представляет собой вид в перспективе электрического транспортного средства по фиг. 1 с колесами в сложенном положении.
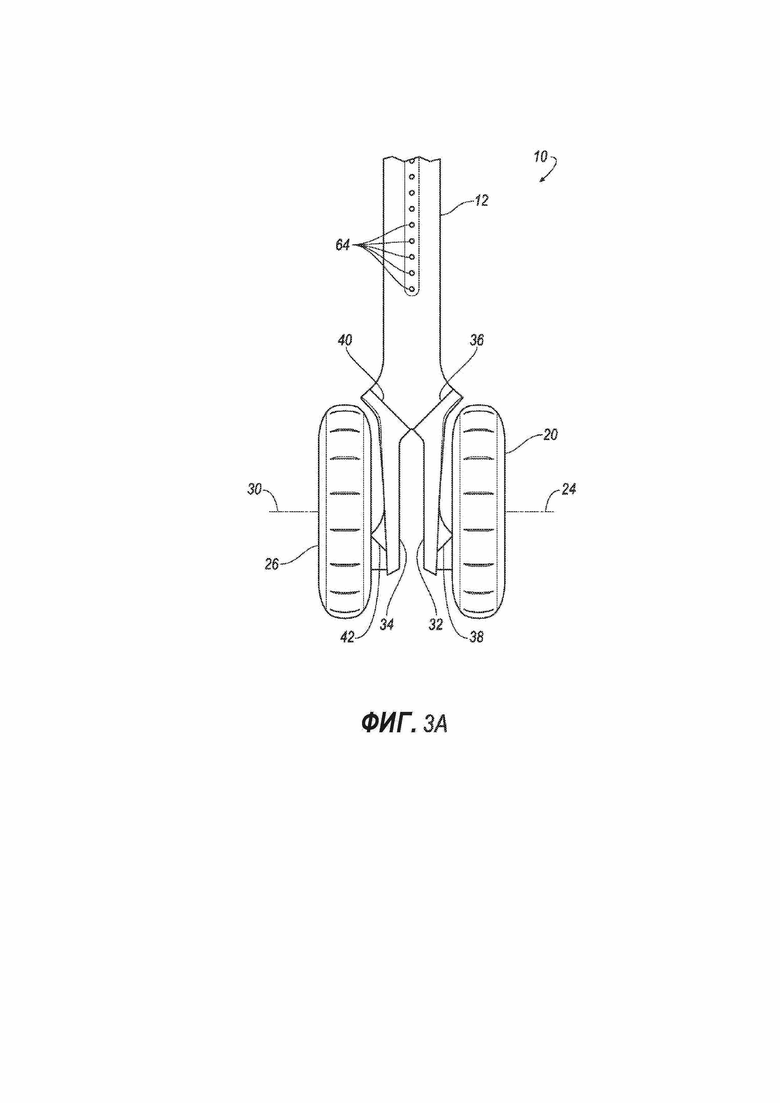
Фиг. 3A представляет собой вид спереди нижней части электрического транспортного средства по фиг. 1 с колесами в сложенном положении.
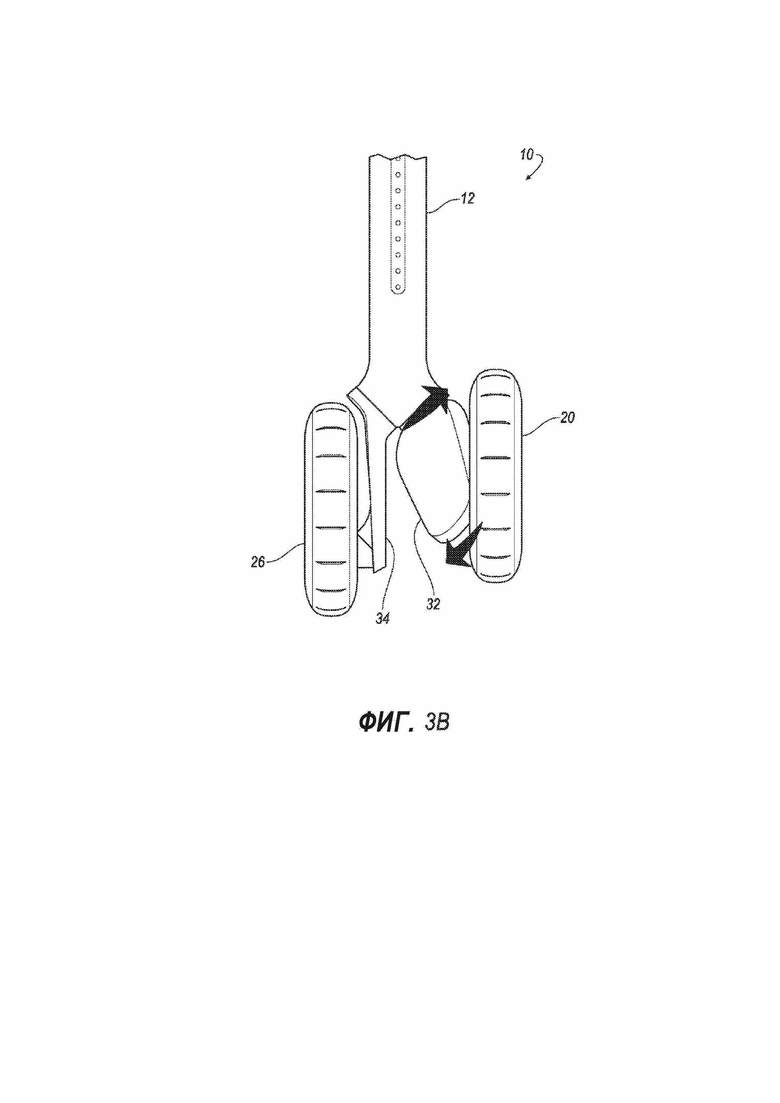
Фиг. 3B представляет собой вид спереди нижней части электрического транспортного средства по фиг. 1 с левым колесом в переходном положении перемещения из сложенного положения в развернутое положение.
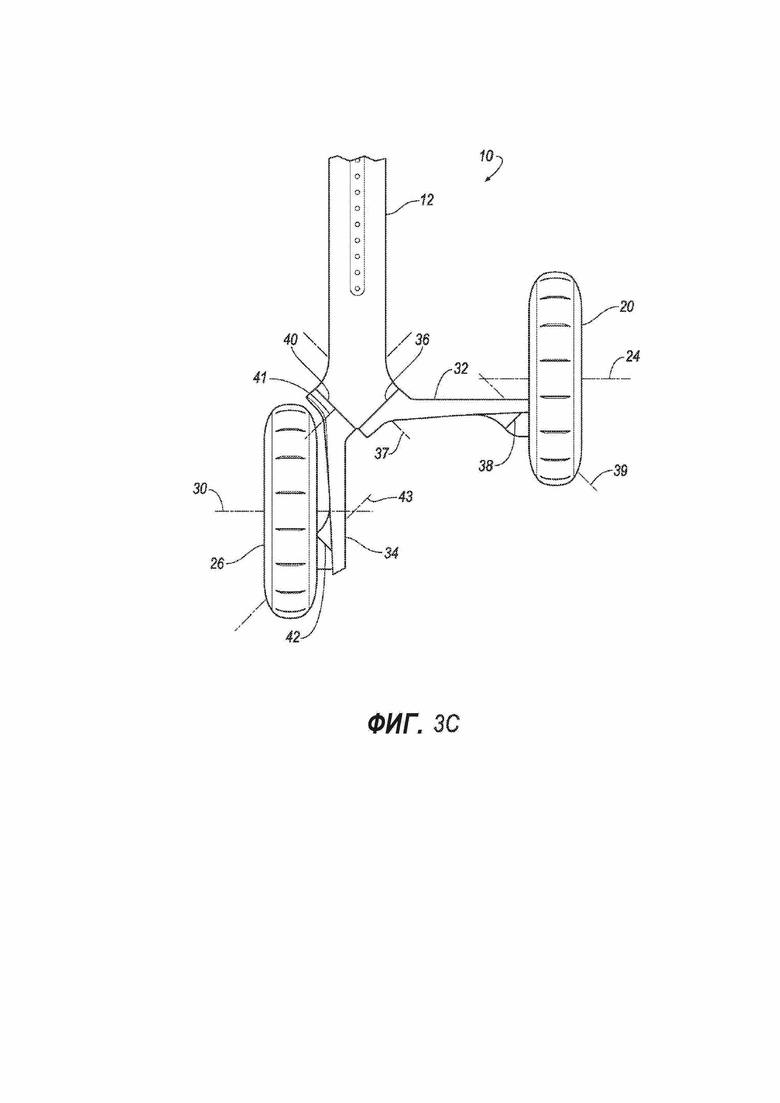
Фиг. 3C представляет собой вид спереди нижней части электрического транспортного средства по фиг. 1 с левым колесом в развернутом положении.
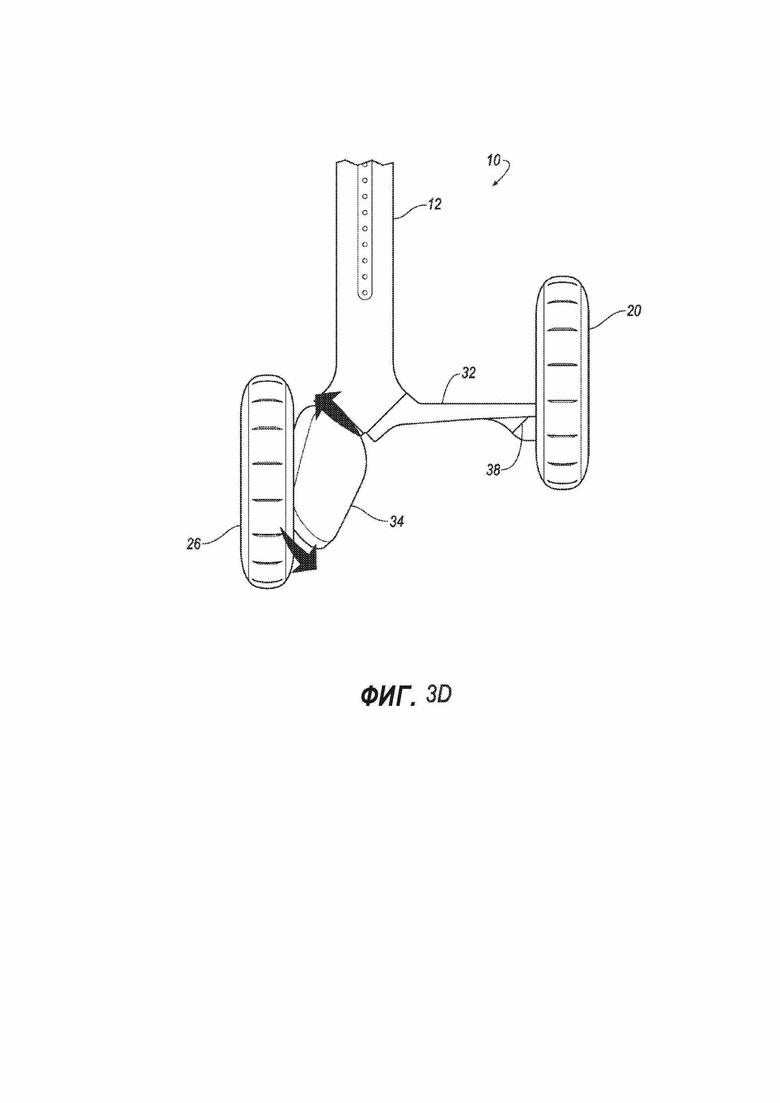
Фиг. 3D представляет собой вид спереди нижней части электрического транспортного средства по фиг. 1 с правым колесом в переходном положении перемещения из сложенного положения в развернутое положение.
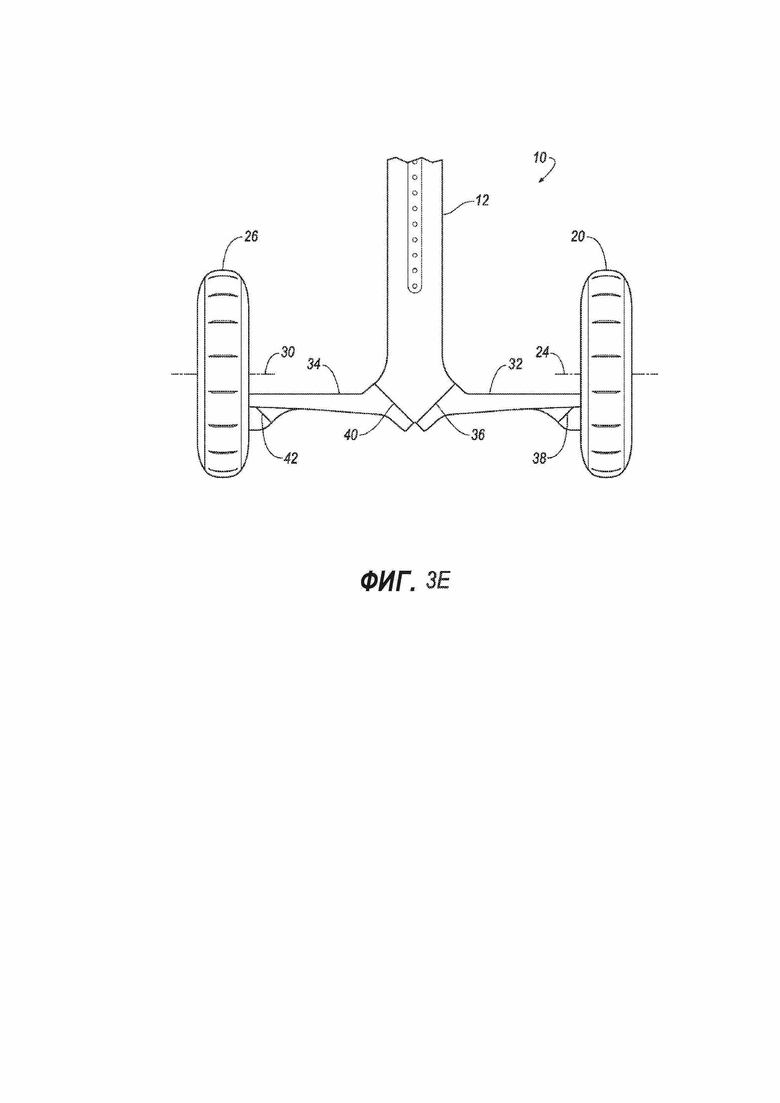
Фиг. 3E представляет собой вид спереди нижней части электрического транспортного средства по фиг. 1 с правым колесом в развернутом положении.
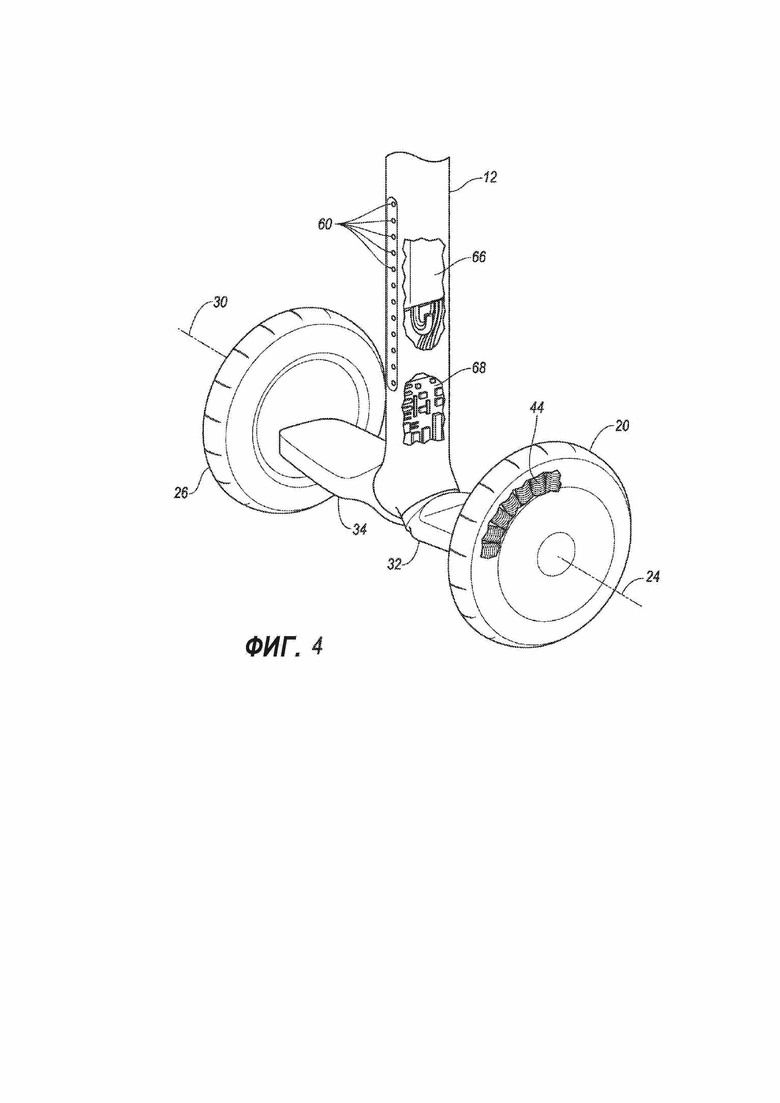
Фиг. 4 представляет собой увеличенный вид в перспективе с частичным разрезом нижней части электрического транспортного средства по фиг. 1.
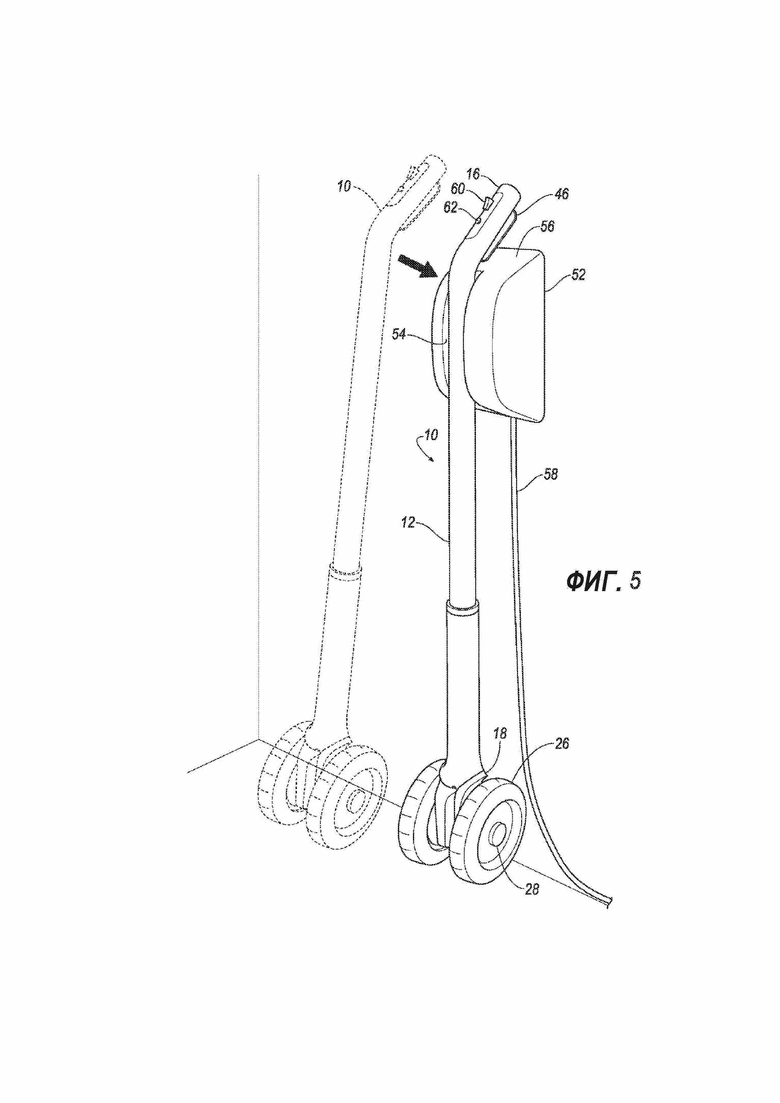
Фиг. 5 представляет собой вид в перспективе электрического транспортного средства по фиг. 1, установленного в зарядную станцию.
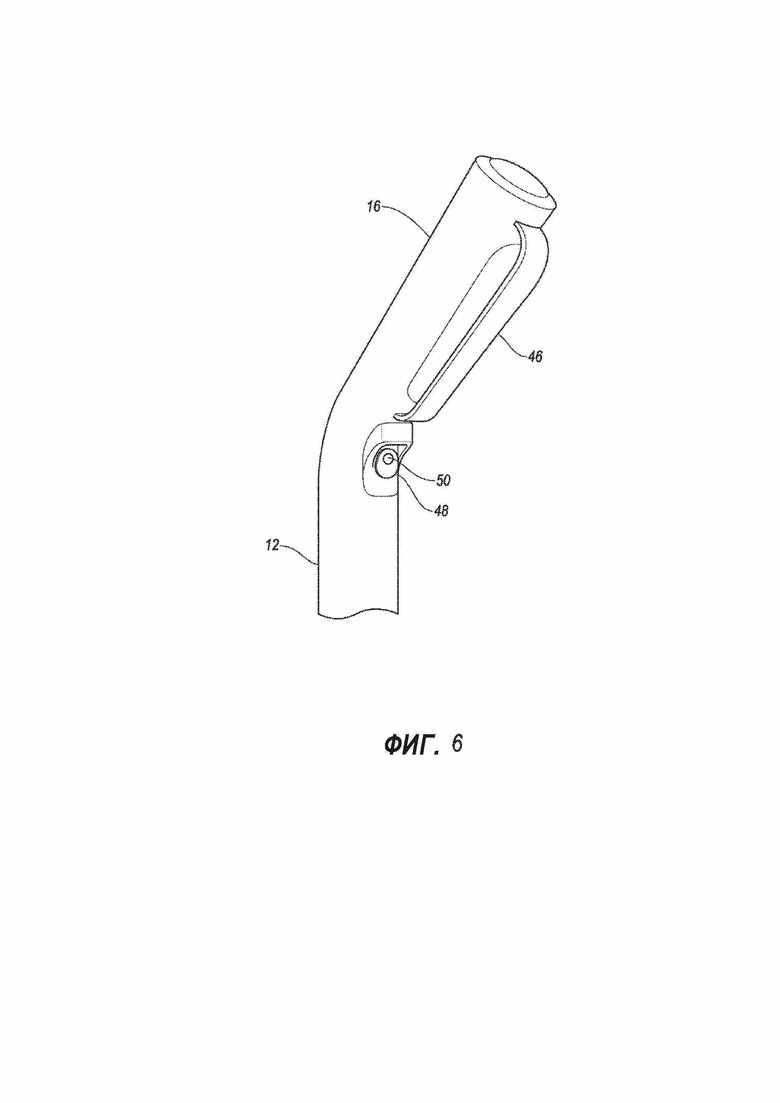
Фиг. 6 представляет собой увеличенный вид в перспективе ручки электрического транспортного средства по фиг. 1.
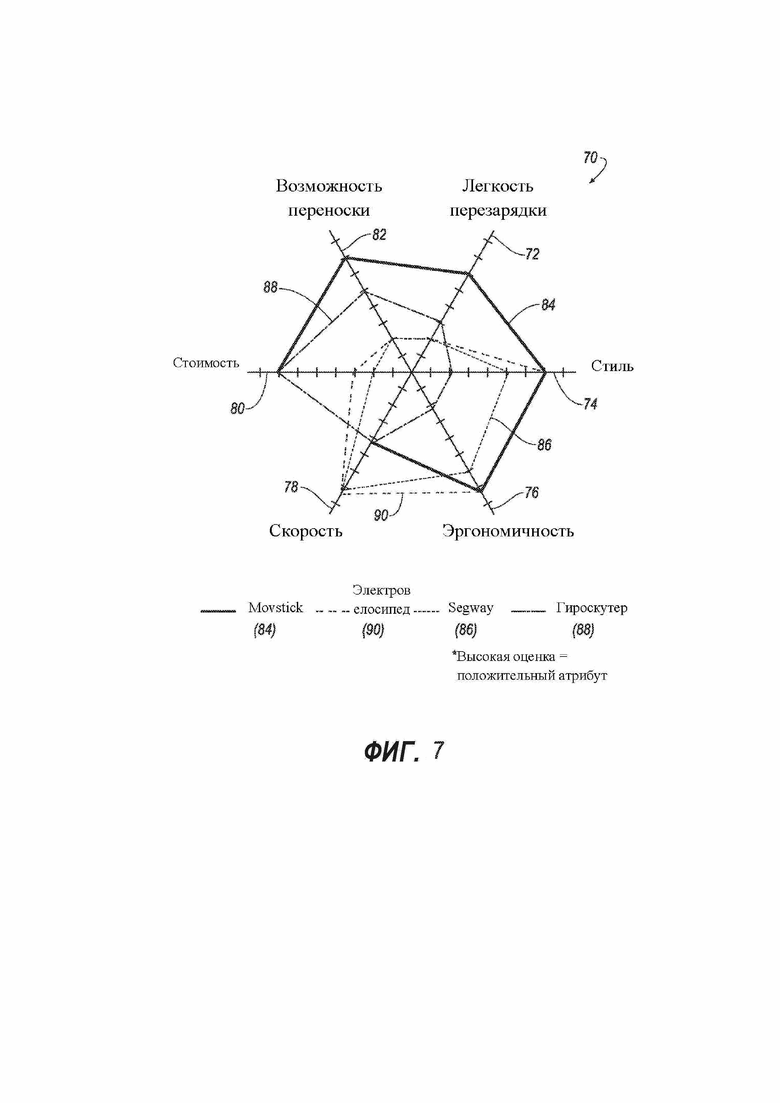
Фиг. 7 представляет собой сравнительную радиальную диаграмму, сравнивающую электрическое транспортное средство по данному изобретению с альтернативными электрическими транспортными средствами.
Подробное описание сущности изобретения
Введение
Переносное электрическое транспортное средство содержит вертикальную стойку и пару шарнирных колес, выполненных с возможностью селективного перемещения относительно указанной стойки между развернутым положением и положением хранения.
Относительные ориентации и направления (в качестве примера, верхний, нижний, низ, назад, перед, зад, задний, наружный, внутренний, внутрь, наружу, боковой, левый, правый) указаны в этом описании не в качестве ограничения, а для удобства читателя при изображении по меньшей мере одного варианта реализации описываемых конструкций.
Типовые элементы системы
Фиг. 1 иллюстрирует переносное электрическое транспортное средство 10. Транспортное средство 10 имеет продолговатую стойку 12, расположенную вдоль центральной оси 14 стойки. Ручка 16 расположена на первом конце стойки 12. Основание 18 расположено на втором конце стойки 12, противоположном ручке 16.
Основание 18 имеет симметричные элементы на противоположных концах от оси 14. Левое колесо 20 установлено с возможностью вращения на левой ступице 22. Левая ступица 22 образует левую ось вращения 24. Правое колесо 26 установлено с возможностью вращения на правой ступице 28. Правая ступица 28 образует правую ось вращения 30. Левая платформа 32 образует по существу плоскую левую подножку. Левая платформа 32 расположена между левой ступицей 22 и стойкой 12. Правая платформа 34 образует по существу плоскую правую подножку. Правая платформа 34 расположена между правой ступицей 28 и стойкой 12. Датчики командных сигналов движения, не показаны, могут быть встроены в платформы 32 и 34. Такие датчики командных сигналов движения можно использовать для выполнения движения вперед, движения назад и поворота. Типовые датчики командных сигналов движения могут представлять собой датчики деформации, подпружиненные переменные реле положения, опорные детали, поворачивающиеся в пределах платформ 32 и 34, и любые другие альтернативные устройства, обнаруживающие смещение нагрузки ног.
Шарнирное соединение левой платформы или левое первое шарнирное соединение 36 или в альтернативном варианте левое шарнирное соединение стойки с платформой шарнирно соединяет левую платформу 32 и стойку 12. Шарнирное соединение левого колеса или левое второе шарнирное соединение 38 или в альтернативном варианте левое шарнирное соединение платформы с колесом шарнирно соединяет левую ступицу 22 и левую платформу 32. Шарнирное соединение правой платформы или правое первое шарнирное соединение 40 или в альтернативном варианте правое шарнирное соединение стойки с платформой шарнирно соединяет правую платформу 34 и стойку 12. Шарнирное соединение правого колеса или правое второе шарнирное соединение 42 или в альтернативном варианте правое шарнирное соединение платформы с колесом шарнирно соединяет правую ступицу 28 и правую платформу 34. Каждое из первых шарнирных соединений 36 и 40 имеет ось поворота 37 и 41 соответственно под углом поворота к оси 14 с углом поворота, по существу равным 45°. Платформы 32 и 34 поворачиваются или вращаются вокруг своей соответствующей первой оси поворота между положениями, по существу перпендикулярными оси 14, и положениями, по существу параллельными оси 14. Каждое из вторых шарнирных соединений 38 и 42 имеет ось поворота 39 и 43 соответственно под углом поворота к платформам 32 и 34 соответственно с углами поворота, по существу равными 45°. Колеса 20, 26 вместе со ступицами 22, 28 поворачиваются или вращаются вокруг своих соответствующих осей 39, 43 поворота между положениями, в которых оси вращения 24 и 30 по существу перпендикулярны платформам 32 и 34 в сложенной ориентации или положении и параллельны платформам 32 и 34 в развернутой ориентации или положении.
Материалы компонентов, в частности, крупных компонентов, таких как стойка 12, ручка 16, основание 18 и платформы 34 и 32, выполнены из высокопрочных легких материалов с поперечными сечениями и формами, обеспечивающими достаточную прочность и жесткость. Типовые материалы включают, но без ограничения, композитные армированные полимеры, такие как графитопластиковые материалы и алюминий аэрокосмического качества.
Шарнирные соединения 36, 38, 40, 42 позволяют складывать колеса 20, 26 из развернутого положения в сложенное положение. В одном варианте реализации изобретения шарнирными соединениями 36, 38, 40, 42 в развернутом положении манипулируют вручную, поворачивая колеса между развернутым и сложенным положением. Такие шарнирные соединения могут содержать механические фиксаторы (не показаны), известные в области шарнирных механизмов, удерживающие шарнирные соединения в развернутом и сложенном положении. В альтернативном варианте реализации изобретения электрические двигатели (не показаны) приводят в движение шарнирные соединения 36, 38, 40, 42 для перемещения между развернутым положением и сложенным положением в ответ на команду оператора.
Приводной двигатель 44, показанный частично на фиг. 4, соединен с возможностью привода с колесом 20. В проиллюстрированном типовом варианте реализации изобретения роторная часть двигателя 44 встроена в колесо 20. Двигатель 44 аналогичным образом встроен в колесо 26.
Типовая ручка 16 содержит накладку 46 ручки на нижней стороне ручки 16, как лучше показано на фиг. 6. Зарядный порт 48 содержит зарядный разъем 50, расположенный под накладкой 46. Ручку 16 вставляют в зарядное устройство 52 для зарядки, как лучше всего показано на фиг. 6. Типовое зарядное устройство 52 имеет приемный канал 54, принимающий верхнюю часть стойки 12. Верхняя поверхность 56 зарядного устройства 52 находится под углом к приемному каналу 54, по существу равным углу ручки относительно стойки. Ручка 16 опирается на верхнюю поверхность 56, когда транспортное средство 10 находится в зацеплении с зарядным устройством 52. Зарядное соединение (не показано) в зарядном устройстве 52 выравнивается с разъемом 50, когда транспортное средство 10 таким образом зацепляется с зарядным устройством 52. Шнур 58 питания соединяет зарядное устройство 52 с источником электрической энергии, таким как стенная розетка переменного тока (не показана). Также в типовую ручку 16 встроены переключатель 60 управления питанием и переключатель 62 управления освещением. Типовой переключатель 60 управления питанием представляет собой тумблерный переключатель с включенным и выключенным положением.
Множество передних фонарей 64 расположены на обращенной вперед поверхности стойки 12. Типовые фонари могут использоваться для нескольких целей, в том числе освещения пути перед транспортным средством, увеличения видимости транспортного средства и его водителя для пешеходов и водителей других транспортных средств и предоставления индикации оставшегося запаса электрической энергии в аккумуляторе энергии транспортного средства, таком как аккумуляторная батарея, суперконденсатор или ультраконденсатор, с уменьшением количества горящих фонарей с количеством энергии в запасе.
Как лучше всего видно на фиг. 4, типовой аккумулятор электрической энергии в виде литий-ионной аккумуляторной батареи 66 расположен внутри стойки 12 выше основания 18. Альтернативные формы аккумуляторов электрической энергии включают суперконденсаторы, ультраконденсаторы и другие доступные формы аккумуляторных батарей. Также по существу в стойке 12 расположен типовой электрический блок 68 управления (ЭБУ), управляющий питанием в транспортном средстве 10 и управляющий системами транспортного средства, в том числе двигателями 44 транспортного средства. Двигатели 44 имеют электрическое соединение с ЭБУ 68 и управляются им. ЭБУ 68 имеет электрическое соединение также с датчиками в платформах 32 и 34. Сигналы или данные от датчиков командных сигналов движения в платформах 32 и 34 поступают в ЭБУ. ЭБУ 68 выдает команды двигателям 44 на любое движение транспортного средства 10 на основе сигналов или данных от датчиков в платформах 32 и 34. Такие движения включают движение вперед, движение назад и поворотные движения. Движение вперед выполняется путем вращения обоих двигателей по существу с одинаковой скоростью в направлении вперед. Движение назад выполняется путем вращения обоих двигателей по существу с одинаковой скоростью в направлении назад. Поворотное движение выполняется путем вращения двигателей с заметно отличающимися относительными скоростями. Разница указанных относительных скоростей может влиять на величину радиуса поворота. В качестве примера, вращение обоих двигателей в одинаковом направлении, при котором один двигатель вращается значительно быстрее другого двигателя, приводит к дугообразному повороту; вращение только одного двигателя заставляет транспортное средство 10 по существу разворачиваться вокруг невращающегося колеса; а вращение колес 20 и 26 в противоположных направлениях с равными скоростями разворачивает транспортное средство 10 вокруг вертикальной оси (не показана) посередине между колесами 20 и 26.
Фиг. 7 представляет сравнительную радиальную диаграмму 70, сравнивающую четыре различных типа двухколесных электрических транспортных средств. Диаграмма 70 имеет шесть различных осей для ключевых аспектов электрических транспортных средств: легкость перезарядки 72, стиль 74, эргономичность 76, скорость 78, стоимость 80, и возможность переноски 82. Чем дальше атрибут изображен от центра, тем более положительна оценка. Четыре транспортных средства, оцениваемые на диаграмме, показаны отдельными линиями, включающими линии для транспортного средства по данному изобретению 84, Segway PT 86, обычного гироскутера 88 и велосипеда с электрическим приводом 90.
Процесс работы
При работе колеса транспортного средства 10 раздвинуты в развернутое положение или ориентацию, лучше всего видную на фиг. 1. Для того, чтобы использовать транспортное средство 10, водитель сначала включает его с помощью переключателя 60 управления питанием. Переключатель 60 может быть расположен на обращенной к водителю или верхней поверхности ручки 16, благодаря чему водитель может легко выключить транспортное средство во время езды. Когда транспортное средство включено, водитель становится на него с задней стороны, ступая на платформы 32 и 34 аналогично тому, как становятся на гироскутер. Двигатели 44 в комбинации с датчиками в транспортном средстве 10 и алгоритмами управления, хранящимися в памяти ЭБУ 68, удерживают транспортное средство 10 в вертикальном положении с водителем сверху. Водитель держит ручку 16 своей левой рукой либо своей правой рукой. В типовой схеме управления водитель заставляет транспортное средство 10 перемещаться вперед, перенося массу своего тела легким наклоном вперед, нагружая датчики командных сигналов движения в платформах 32 и 34, и заставляя двигатели 44 и таким образом колеса 20 и 26 вращаться вперед. Транспортное средство 10 заставляют остановиться, перенося массу тела водителя легким наклоном назад, нагружая датчики командных сигналов движения соответственно, при этом ЭБУ 68 заставляет двигатели 44 вращаться в обратном направлении. В этой же типовой схеме управления повороты налево и направо можно выполнять, изменяя вращение левого и правого двигателя. При нажатии передней части или зоны носка либо зоны пятки одной из платформ 32 и 34 сильнее другой и нагружении соответствующих датчиков командных сигналов движения транспортное средство 10 будет поворачивать в противоположном направлении. Например, наличие давления вперед на правой платформе 34 приводит к левому повороту. Более резкие повороты можно выполнять, комбинируя противоположные воздействия. Например, давление назад на левой платформе 32 и давление вперед на правой платформе приводит к сравнительно резкому левому повороту или развороту вокруг центральной оси транспортного средства 10. Альтернативный подход к сигналам поворота включает установку тензометрических датчиков в стойку 12 и использование указанных тензометрических датчиков для определения боковых нагрузок на стойку 12, прикладываемых водителем. В этом альтернативном варианте реализации изобретения ЭБУ заставляет транспортное средство 10 поворачивать в направлении силы, прикладываемой к ручке 16.
Остановка транспортного средства 10 легко выполняется путем наклона в направлении, противоположном направлению движения. Например, движение вперед останавливают, удерживая ручку 16 и наклоняясь назад в управляющем движении. Другой способ остановки транспортного средства заключается в том, чтобы просто сойти с транспортного средства. Еще один способ остановки транспортного средства 10 заключается в том, чтобы перевести переключатель 60 в положение выключения. Транспортное средство 10 замедляется до остановки, при этом сохраняя свое равновесие до отключения питания.
Когда транспортное средство 10 не используется для целей перевозки, его легко транспортировать, просто катая по земле. Ручку 16 легче всего использовать для толкания транспортного средства 10 в направлении назад относительно ориентации движения. Когда полная ширина транспортного средства 10 с колесами 20 и 26 в развернутом положении делает сложной транспортировку транспортного средства 10 из-за переполненных дорожек или другого ограниченного пространства, платформы 32, 34 и колеса 20, 26 лучше всего сложить в сложенное положение по фиг. 2. Простой поворот шарнирных соединений 36, 38, 40 и 42 делает размеры транспортного средства 10 не больше чем у сложенной легкой детской коляски, используемой для маленьких детей. Каждое из шарнирных соединений 36, 38, 40 и 42 находится под углом 45° к оси 14. Когда все соединения повернуты к осям вращения 24 и 30, оставаясь выровненными, колеса 20 и 26 могут катиться свободно как в развернутом положении, так и в сложенном положении.
Угол 45° первых шарнирных соединений 36 и 40 позволяет платформам 32 и 34 поворачиваться или вращаться из развернутого положения, в котором платформы 32 и 34 по существу перпендикулярны оси 14, в сложенное положение или ориентацию, по существу параллельную оси 14. Поворот каждой из платформ 32 и 34 на 180° вокруг их соответствующих осей поворота 37, 41 приводит к тому, что платформы 32 и 34 ориентируются или располагаются по существу параллельно оси 14 с прежде верхними поверхностями каждой из платформ 32 и 34, обращенными друг к другу на противоположных сторонах оси 14.
Если повернуты только платформы 32 и 34, соответствующие оси вращения 24 и 30 колес 20 и 26 ориентированы параллельно оси 14, а полученное положение колес 20 и 26 не подходит для предоставления катящейся опоры для транспортного средства 10 в сложенном положении. Угол 45° вторых шарнирных соединений 38 и 42 позволяет ступицам колес 22 и 28 вместе с колесами 20 и 26 поворачиваться или вращаться из развернутого положения, в котором оси 24 и 30 по существу параллельны платформам 32 и 34, в сложенное положение, в котором оси 24 и 30 по существу перпендикулярны платформам 32 и 34. Когда все платформы 32 и 34 и колеса 20 и 26 находятся в своих соответствующих сложенных положениях, оси 24 и 30 по существу перпендикулярны оси 14. Поворот левой ступицы 22 и левого колеса 20 на 180° вокруг соответствующей второй оси 39 поворота приводит к ориентации или положению оси 24, по существу перпендикулярному левой платформе 32. Подобным образом, поворот правой ступицы 28 и правого колеса 26 на 180° вокруг соответствующей второй оси 43 поворота приводит к ориентации или положению оси 30, по существу перпендикулярному правой платформе 34.
Зарядку транспортного средства 10 можно удобно выполнять в стойке хранения транспортного средства с помощью зарядного устройства 52, выполняющего вспомогательную функцию стойки хранения. Зарядные устройства альтернативного исполнения подходят для размещения в больших пассажирских транспортных средствах, например, в багажнике автомобиля или в заднем багажном отделении легкого грузовика и используют доступный источник питания 12 вольт в большем транспортном средстве для зарядки.
Заключение
Описано электрическое транспортное средство с шарнирными колесами.
В контексте данного документа выражение «по существу» означает, что форма, конструкция, размер, количество, время и т.п. может отличаться от описанной точной геометрической формы, расстояния, размера, количества, времени и т.п. по причине несовершенства материалов, обработки, изготовления, передачи данных, скорости вычислений и т.п.
Что касается ссылок на компьютеры в данном описании, каждое из вычислительных устройств, таких как ЭБУ, обсуждаемых в данном документе, как правило содержит команды, исполняемые одним или большим количеством вычислительных устройств, таких как определенные выше, для выполнения блоков или этапов процессов, описанных выше. Например, блоки процессов, обсуждаемых выше, реализованы в виде команд, исполняемых компьютером.
Команды, исполняемые компьютером, могут компилироваться или интерпретироваться из компьютерных программ, созданных с помощью различных языков и/или технологий программирования, в том числе, но без ограничения, и либо самостоятельно, либо в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.п. В целом, процессор (например, микропроцессор) получает команды, например, из запоминающего устройства, машиночитаемого носителя и т.п., и исполняет эти команды, таким образом выполняя один или большее количество процессов, в том числе один или большее количество из процессов, описанных в данном документе. Такие команды и другие данные можно хранить и передавать с помощью различных машиночитаемых носителей. Файл в вычислительном устройстве в целом представляет собой набор данных, хранимых на машиночитаемом носителе, таком как носитель данных, оперативное запоминающее устройство и т.п.
Машиночитаемый носитель включает любой носитель, участвующий в предоставлении данных (например, команд), которые могут быть считаны компьютером. Такой носитель данных может быть представлен в различных формах, в том числе, но без ограничения, может представлять собой энергонезависимый носитель, энергозависимый носитель и т.п. Энергонезависимые носители включают, например, оптические или магнитные диски и другие постоянные запоминающие устройства. Энергозависимые носители включают динамические запоминающие устройства с произвольным доступом (DRAM), как правило составляющие главное запоминающее устройство. Обычные формы машиночитаемых носителей включают, например, дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель CD ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель с комбинациями отверстий, ЗУПД, ППЗУ, ЭППЗУ, флэш-ППЗУ, любую другую микросхему или картридж памяти, либо любой другой носитель, чтение с которого может выполнять компьютер.
В графических материалах одинаковые номера позиций указывают одинаковые элементы. Кроме того, некоторые или все из этих элементов могут быть изменены. Что касается процессов, систем, способов и т.п., описанных в данном документе, следует понимать, что хотя согласно описанию этапы таких процессов и т.п., касающиеся развертывания и использования электрических транспортных средств, происходят в определенной упорядоченной последовательности, на практике описанные этапы таких процессов могут выполняться в порядке, отличающемся от описанного в данном документе. Кроме того, следует понимать, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены или некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе представлены с целью иллюстрирования некоторых вариантов реализации изобретения и ни в коем случае не должны рассматриваться как ограничивающие данное изобретение.
Соответственно, следует понимать, что представленное выше описание носит иллюстративный, а не ограничительный характер. Многие варианты реализации и применения изобретения, отличающиеся от представленных примеров, станут очевидными для специалиста в данной области техники после прочтения представленного выше описания. Объем изобретения следует определять со ссылкой не на представленное выше описание, а на приложенную формулу изобретения, а также полный объем эквивалентов, на которые распространяется такая формула изобретения. Предполагается и предусматривается, что в области техники, обсуждаемой в данном документе, в будущем будут происходить разработки, и что описываемые системы и способы будут включены в такие будущие варианты реализации изобретения. В целом, следует понимать, что в изобретение могут быть внесены модификации и вариации, и что оно ограничено только следующей формулой изобретения.
Предполагается, что все термины, используемые в формуле изобретения, толкуются в самом широком своем разумном смысле и имеют свое обычное значение, понимаемое специалистами в данной области техники, если только в данном документе не указано явным образом иное. В частности, использование форм единственного числа следует рассматривать как указание на один или большее количество указанных элементов, если только формула изобретения не содержит явного указания на ограничение противоположным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЕ МИКРОТЕЛЕЖКИ | 2016 |
|
RU2717118C1 |
| ТРЕХКОЛЕСНЫЙ САМОКАТ С ЗАДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2008 |
|
RU2470820C2 |
| УСТРОЙСТВО ВЫБРОСА РАСПЫЛЕННОЙ СТРУИ | 2015 |
|
RU2718997C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2000 |
|
RU2205766C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ КОМПЕНСАЦИИ НЕДОСТАТОЧНОЙ СПОСОБНОСТИ ЧЕЛОВЕКА, СТРАДАЮЩЕГО НАРУШЕНИЕМ РАВНОВЕСИЯ, СОХРАНЯТЬ РАВНОВЕСИЕ | 1995 |
|
RU2153868C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Самоходная транспортировочная тележка | 2023 |
|
RU2822028C1 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| РАМА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2595225C2 |
Группа изобретений относится к области машиностроения, в частности к электрическим транспортным средствам. Электрическое транспортное средство содержит стойку. Основание на втором конце стойки имеет симметричные элементы на противоположных концах от оси стойки. Элементы стойки с каждой стороны включают в себя колесо, приводной двигатель, платформу между колесом и стойкой, первое шарнирное соединение, соединяющее стойку и платформу, и второе шарнирное соединение, соединяющее платформу и колесо. Система подзарядки для электрического транспортного средства содержит электрическое транспортное средство. Электрическое транспортное средство содержит зарядное устройство. Электрическое транспортное средство содержит продолговатую стойку и основание, имеющее симметричные элементы на противоположных концах от стойки. Оси колес параллельны друг другу и перпендикулярны стойке в развернутой ориентации и сложенной ориентации. Достигается уменьшение массы конструкции. 3 н. и 17 з.п. ф-лы, 7 ил.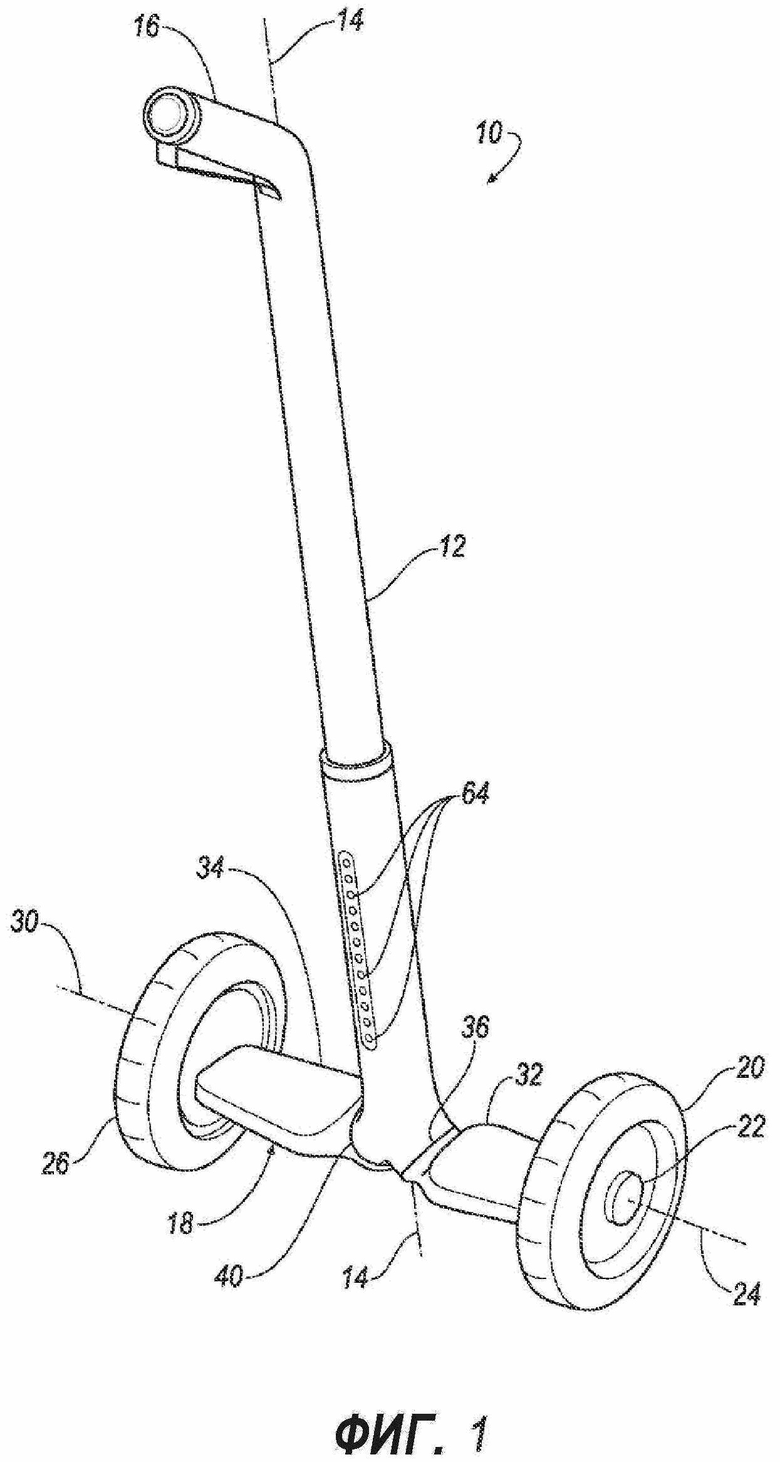
1. Электрическое транспортное средство, содержащее:
стойку, имеющую ось стойки; и
основание на втором конце стойки, имеющее по существу симметричные элементы на противоположных концах от оси стойки, при этом указанные элементы с каждой стороны включают в себя:
- колесо, имеющее ось вращения,
- приводной двигатель, соединенный с колесом,
- платформу между колесом и стойкой,
- первое шарнирное соединение, соединяющее стойку и платформу, и
- второе шарнирное соединение, соединяющее платформу и колесо;
при этом платформы в первой ориентации по существу перпендикулярны оси стойки, а во второй ориентации по существу параллельны оси стойки, и оси колес по существу параллельны друг другу и по существу перпендикулярны оси стойки в первой ориентации и во второй ориентации.
2. Транспортное средство по п. 1, в котором первые шарнирные соединения составляют угол 45° с осью стойки, а вторые шарнирные соединения составляют угол 45° с платформой.
3. Транспортное средство по п. 1, дополнительно содержащее ручку на втором конце стойки, противоположном основанию.
4. Транспортное средство по п. 1, в котором внутри стойки расположен блок хранения электрической энергии.
5. Транспортное средство по п. 1, в котором электронный блок управления расположен по существу внутри стойки.
6. Транспортное средство по п. 1, в котором на обращенной вперед поверхности стойки расположено множество передних фонарей.
7. Транспортное средство по п. 1, в котором двигатель встроен в колесо.
8. Транспортное средство по п. 3, в котором на ручке закреплен переключатель управления питанием, имеющий электрическое соединение с электронным блоком управления.
9. Система подзарядки для электрического транспортного средства, содержащая:
электрическое транспортное средство, содержащее:
стойку, расположенную вдоль оси стойки,
зарядный порт, встроенный в транспортное средство,
основание на первом конце стойки, имеющее симметричные элементы на противоположных концах от оси стойки, при этом указанные элементы с каждой стороны содержат:
- колесо, выполненное с возможностью вращения, имеющее ось вращения,
- приводной двигатель, соединенный с колесом,
- платформу между колесом и стойкой,
- первое шарнирное соединение, соединяющее стойку и платформу, и
- второе шарнирное соединение, соединяющее платформу и колесо;
при этом в первой повернутой ориентации платформы по существу перпендикулярны оси, а во второй ориентации по существу параллельны оси стойки, и оси колес по существу параллельны друг другу и по существу перпендикулярны оси стойки в первой ориентации и во второй ориентации; и
зарядное устройство для электрического транспортного средства, содержащее корпус, принимающий транспортное средство, и образующее электрическое соединение с зарядным портом.
10. Система по п. 9, в которой зарядный порт встроен в стойку.
11. Система по п. 10, дополнительно содержащая ручку на втором конце стойки, противоположном основанию.
12. Система по п. 11, в которой зарядное устройство имеет приемный канал, принимающий верхнюю часть стойки, и верхнюю поверхность, находящуюся под углом к приемному каналу, по существу равным углу ручки относительно стойки.
13. Система по п. 9, в которой блок хранения электрической энергии расположен внутри стойки.
14. Система по п. 13, в которой электронный блок управления расположен по существу внутри стойки.
15. Система по п. 9, в которой на обращенной вперед поверхности стойки расположено множество передних фонарей.
16. Система по п. 9, в которой двигатель встроен в колесо.
17. Система по п. 9, в которой первые шарнирные соединения составляют угол 45° с осью стойки, а вторые шарнирные соединения составляют угол 45° с платформой.
18. Электрическое транспортное средство, содержащее:
продолговатую стойку; и
основание, имеющее симметричные элементы на противоположных концах от стойки, содержащие:
- колесо, имеющее ось вращения,
- двигатель, соединенный с колесом,
- платформу между колесом и стойкой,
- шарнирное соединение стойки с платформой, и
- шарнирное соединение платформы с колесом;
при этом оси колес параллельны друг другу и перпендикулярны стойке в развернутой ориентации и сложенной ориентации.
19. Транспортное средство по п. 18, в котором шарнирные соединения стойки с платформой составляют угол 45° со стойкой, а шарнирные соединения платформы с колесом составляют угол 45° с платформой.
20. Транспортное средство по п. 18, в котором блок хранения электрической энергии расположен по существу внутри стойки и электронный блок управления расположен по существу внутри стойки.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| DE 10147263 A1, 24.04.2003 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| ДВУХКОЛЕЙНЫЙ ДВУХКОЛЕСНЫЙ ВЕЛОСИПЕД С ПЛАВАЮЩЕЙ КАБИНОЙ | 1995 |
|
RU2090429C1 |

