Предлагаемое изобретение относится к общему машиностроению и может быть использовано в загрузочных устройствах автоматических и полуавтоматических станков, а так же для подачи заготовок с конвейера на станок, с позиции на позицию.
Известен зубчато-реечный цевочный механизм, содержащий корпус с линейными направляющими, ведущее звено в виде основного ползуна с ведущим пальцем, расположенное в линейных направляющих, жестко закрепленную на основании зубчатую рейку, дополнительный ползун, установленное на нем в подшипниках вращения ведомое звено в виде зубчатого колеса с прямолинейным пазом, выполненным на его торцевой поверхности, при этом длина паза равна сумме половины диаметров зубчатого колеса и пальца, а ось паза параллельна оси дополнительного ползуна (АС СССР №855295 Заявл. 21.12.1979, Опубл. 15.08.1981 Бюл. №30).
Недостатком данного механизма является низкое быстродействие, обусловленное наличием жестких ударов в начале и конце движения выходного звена.
Наиболее близким к заявляемому является кантователь, содержащий корпус, шток, установленный в нем в подшипниках вращения вал, размещенное на нем зубчатое колесо, взаимодействующее с зубчатой рейкой, жестко связанный с валом диск с ведущим пальцем, ведомое звено в виде двуплечего рычага, установленного в подшипниках вращения корпуса, имеющего два паза вдоль его продольной оси и фиксирующее устройство в виде направляющей планки, размещенной на торцевой поверхности зубчатой рейки и взаимодействующей с диском и двумя упругими элементами разной жесткости, один из которых размещен между зубчатым колесом и штоком, а другой, имеющий большую жесткость - неподвижно в корпусе и взаимодействует с торцевой поверхностью диска (АС СССР №1315698, кл. F16H 27/06, Заявл. 10.11.1985, Опубл. 07.06.1987 Бюл. №21).
Недостатками данного механизма является необходимость использования в конструкции кантователя дополнительного механизма выдвижения руки для передачи изделий к технологическим машинам или накопителям.
Технической задачей предполагаемого изобретения является уменьшение габаритов и упрощение конструкции кантователя за счет совмещения механизмов поворота и выдвижения его руки.
Поставленная задача достигается тем, что в кантователе, содержащем корпус с линейными направляющими, вал с установленным на нем зубчатым колесом, взаимодействующим с зубчатой рейкой, жестко связанный с зубчатым колесом ведущий палец, ведомое звено в виде рычага с продольным пазом, жестко связанное с рукой, снабженной захватом и фиксирующее устройство, вал с закрепленным на нем зубчатым колесом, расположен в подшипниках вращения в корпусе и соединен с приводом вращения, зубчатая рейка установлена в линейных направляющих корпуса, а рычаг установлен в подшипниках вращения на кронштейне, жестко связанном с зубчатой рейкой;
- фиксирующее устройство содержит кронштейн, жестко связанный с корпусом, призматический шип и призматический паз, при этом, призматический шип выполнен на руке или кронштейне, а паз выполнен в кронштейне или руке соответственно.
Новым в предлагаемом кантователе является то, что, вал с установленным на нем зубчатым колесом, взаимодействующим с зубчатой рейкой, жестко связанный с зубчатым колесом ведущий палец, ведомое звено в виде рычага с продольным пазом и фиксирующее устройство, вал с закрепленным на нем зубчатым колесом, расположен в подшипниках вращения в корпусе и соединен с приводом вращения, зубчатая рейка установлена в линейных направляющих корпуса, а рычаг установлен в подшипниках вращения на кронштейне, жестко связанном с зубчатой рейкой;
- фиксирующее устройство содержит кронштейн, жестко связанный с корпусом, призматический шип и призматический паз, при этом, призматический шип выполнен на механической руке или кронштейне, а паз выполнен в кронштейне или механической руке соответственно.
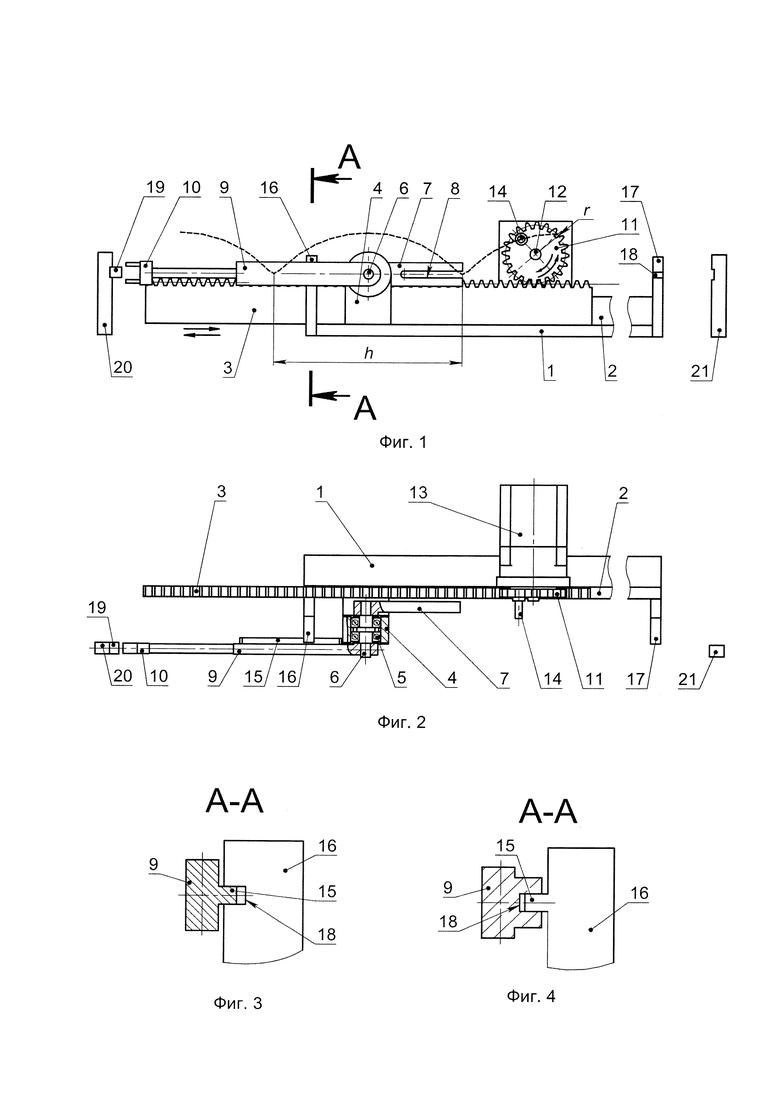
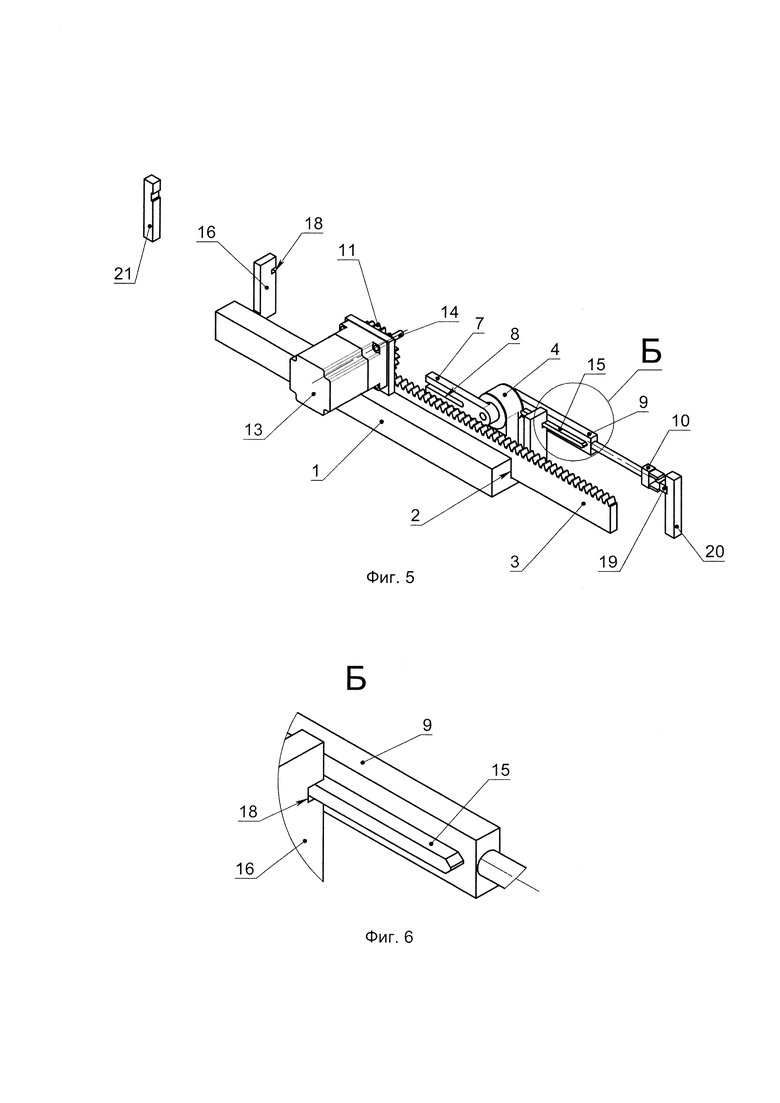
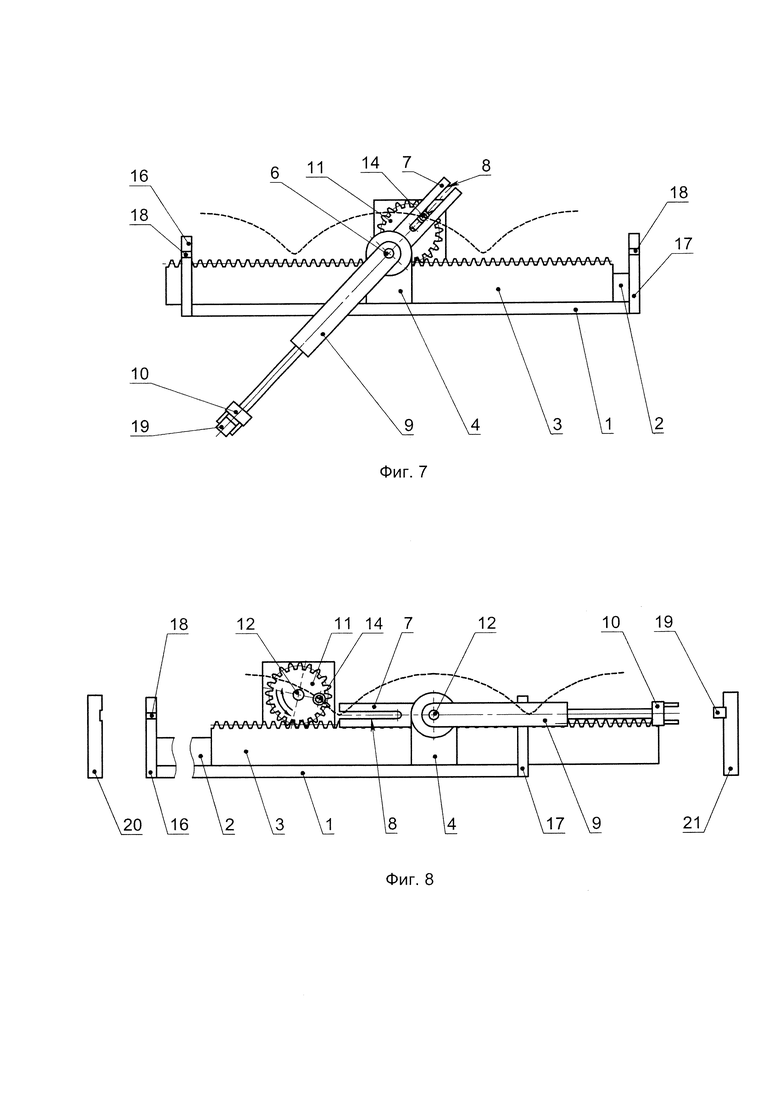
На фиг. 1 показана фронтальная проекция предлагаемого устройства в левом положении; на фиг. 2 - вид сверху на фиг. 1; на фиг. 3 - разрез А-А на фиг. 1 при выполнении шипа фиксирующего устройства на руке, а паза - в кронштейне; на фиг. 4 - разрез А-А на фиг. 1 при выполнении шипа фиксирующего устройства на кронштейне, а паза - в руке; фиг. 5 - аксонометрическая проекция, наглядно показывающая фиксирующее устройство; на фиг. 6 - местный вид Б на фиг. 5; на фиг. 7 - фронтальная проекция предлагаемого устройства в промежуточном положении; на фиг. 8 - фронтальная проекция предлагаемого устройства в правом положении.
Предлагаемое устройство состоит из корпуса 1 с линейными направляющими 2, в которых установлена зубчатая рейка 3. На зубчатой рейке 3 жестко закреплен кронштейн 4. В подшипниках 5 кронштейна 4 установлен вал 6. Вал 6 жестко связывает одноплечий рычаг 7, имеющий продольный паз 8, с механической рукой 9, оснащенной на конце схватом 10.
С зубчатой рейкой 3 взаимодействует зубчатое колесо 11, установленное на выходном валу 12, электропривода 13, жестко связанного с корпусом 1. Подшипники электропривода 13, в которых установлен выходной вал 12 на фиг. не показаны. Электропривод 13 имеет программное управление. На зубчатом колесе 11 жестко закреплен ведущий палец 14.
Фиксирующее устройство рычага 7 и механической руки 9 состоит из призматического шипа 15, выполненного на механической руке 9, а также кронштейнов 16 и 17, установленных на корпусе 1. Кронштейны 16 и 17 имеют пазы 18 (фиг. 3).
Шипы 15 могут быть выполнены на кронштейнах 16 и 17, тогда паз 18 выполняется в механической руке 9 (фиг. 4).
Кантователь предназначен для передачи заготовок 19 из приемного накопителя 20 в накопитель технологической машины 21.
Устройство работает следующим образом. Перед включением кантователя механическая рука 9 должна находиться в правом или левом положении. На фиг. 1-6 для примера показан механизм в левом положении. При этом призматический шип 15 располагается в пазу 18 кронштейна 16, предотвращая поворот механической руки 9 и рычага 7, а палец 14 выведен из зацепления с пазом 8. Шип 15 может быть выполнен на кронштейне 16, а паз 18 - на механической руке 9.
По заданной программе включается электропривод 13, его вал 12, жестко связанный с зубчатым колесом 11 приводится во вращение по часовой стрелке. Зубчатое колесо 11 перемещает зубчатую рейку 3 с кронштейном 4, механической рукой 9 и схватом 10 влево. При достижении требуемого для захвата заготовки 19 положения, электропривод 13 останавливается. Схват 10 захватывает заготовку 19, установленную в приемный накопитель 20. Далее происходит реверсирование вращения вала 12 электропривода 13. При вращении зубчатого колеса 11 против часовой стрелки заготовка 19 извлекается из приемного накопителя 20. Угловое положение вала 12, в котором происходит захват заготовки 19 задается в управляющей программе электропривода 13 и быть может изменено в зависимости от ее габаритов.
Ведущий палец 14, жестко закрепленный на зубчатом колесе 11 относительно неподвижного корпуса 1 совершает вращательное движение. Однако относительно поступательно движущейся зубчатой рейки 3 и жестко соединенного с ней кронштейна 4 ведущий палец 14 перемещается по укороченной циклоиде. Траектория пальца 14 относительно зубчатой рейки 3 за один цикл работы показана пунктирной линией.
Когда ведущий палец 14 входит в паз 8 одноплечего рычага 7, призматический элемент 15 выходит из паза 18 кронштейна 16, освобождая механическую руку 9.
Расположение оси вращения рычага 7 относительно зубчатого колеса 11 и рейки 3 выбирают так, чтобы обеспечить параллельность направления скорости ведущего пальца 14 оси паза 8 в момент входа пальца 14 в паз 8. Радиус расположения ведущего пальца 14 на зубчатом колесе 11 подбирается таким образом, чтобы исключить его интерференцию с рычагом 7 в момент входа в паз 8.
При дальнейшем вращении вала 12 против часовой стрелки происходит поворот механической руки 9 на угол 180°. Ведущий палец 14 выходит из паза 8, а призматический элемент 15 входит в паз 18 кронштейна 17, фиксируя механическую руку 9 от поворота. Центр зубчатого колеса 11 при этом перемещается на величину
h=2πr,
где r - радиус делительной окружности зубчатого колеса 10.
Вал 12 электропривода 13 продолжает вращаться по программе до момента установки заготовки 20 в накопитель технологической машины 21.
Далее схват 10 освобождает заготовку 19. Производится реверсирование вала 12 электропривода 13. Зубчатое колесо 11, вращаясь против часовой стрелки, перемещает зубчатую рейку 3 с механической рукой 9 и охватом 10 влево от накопителя 21 (фиг. 8). При дальнейшем вращении вала 12 электропривода 13 палец 14 входит в паз 8 и поворачивает рычаг 7. При обратном движении механической руки 9 траектория пальца 14 - та же укороченная циклоида.
Кантователь возвращается в исходное положение. Далее цикл работы кантователя повторяется.
Работа кантователя может быть гибко изменена при изменении управляющей программы электропривода 13. Например, обрабатанная заготовка 19 может извлекаться из накопителя 21 и устанавливаться обратно в накопитель 20.
Применение предлагаемого устройства позволит уменьшить габариты и упростить конструкцию кантователя за счет совмещения механизмов поворота и выдвижения его руки. Электропривод кантователя может быть оперативно перепрограммирован на перемещение заготовок различных типоразмеров путем изменения углового положения выходного вала электропривода при захвате и освобождении заготовки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Манипулятор | 1989 |
|
SU1660953A1 |
| Устройство для резки рулонного материала | 1988 |
|
SU1750865A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 2006 |
|
RU2304242C1 |
| Установка для контактной сварки | 1978 |
|
SU764893A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| Кантователь | 1985 |
|
SU1315698A1 |
Изобретение относится к машиностроению. Кантователь содержит корпус с линейными направляющими, вал с установленным на нем зубчатым колесом, взаимодействующим с зубчатой рейкой, жестко связанный с зубчатым колесом ведущий палец, ведомое звено в виде рычага с продольным пазом, жестко связанное с механической рукой, и фиксирующее устройство. Вал с закрепленным на нем зубчатым колесом расположен в подшипниках вращения в корпусе и соединен с приводом вращения, зубчатая рейка установлена в линейных направляющих корпуса, а рычаг установлен в подшипниках вращения на кронштейне, жестко связанном с зубчатой рейкой. Обеспечивается уменьшение габаритов и упрощение конструкции кантователя за счет совмещения механизмов поворота и выдвижения его руки. 1 з.п. ф-лы, 8 ил.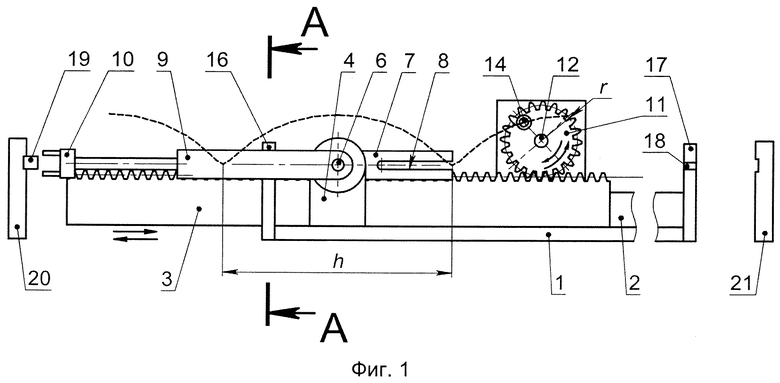
1. Кантователь, содержащий корпус с линейными направляющими, вал с установленным на нем зубчатым колесом, взаимодействующим с зубчатой рейкой, жестко связанный с зубчатым колесом ведущий палец, ведомое звено в виде рычага с продольным пазом, жестко связанное с механической рукой, и фиксирующее устройство, отличающийся тем, что вал с закрепленным на нем зубчатым колесом расположен в подшипниках вращения в корпусе и соединен с приводом вращения, зубчатая рейка установлена в линейных направляющих корпуса, а рычаг установлен в подшипниках вращения на кронштейне, жестко связанном с зубчатой рейкой;
2. Кантователь по п. 1, отличающийся тем, что фиксирующее устройство содержит кронштейн, жестко связанный с корпусом, призматический шип и призматический паз, при этом призматический шип выполнен на механической руке или кронштейне, а паз выполнен в кронштейне или механической руке соответственно.
| Кантователь | 1985 |
|
SU1315698A1 |
| Линия для изготовления литейных стержней | 1990 |
|
SU1722682A1 |
| Прибор для взятия проб жидкости из герметически закрытых резервуаров | 1928 |
|
SU11783A1 |
| WO 2000015524 A1, 23.03.2000 | |||
| CN 202784872 U, 13.03.2013. | |||

