Изобретение относится к общему машиностроению и может быть использовано в загрузочных устройствах автоматических и полуавтомати еских станков, а также для подачи заготовок с конвейера на станок, с позици на позицию.
Цель изобретения - расширение экплуатационных возможностегЧ механизма за счет снабжения кантователя планкой и двумя упругими элементами разной жесткости.
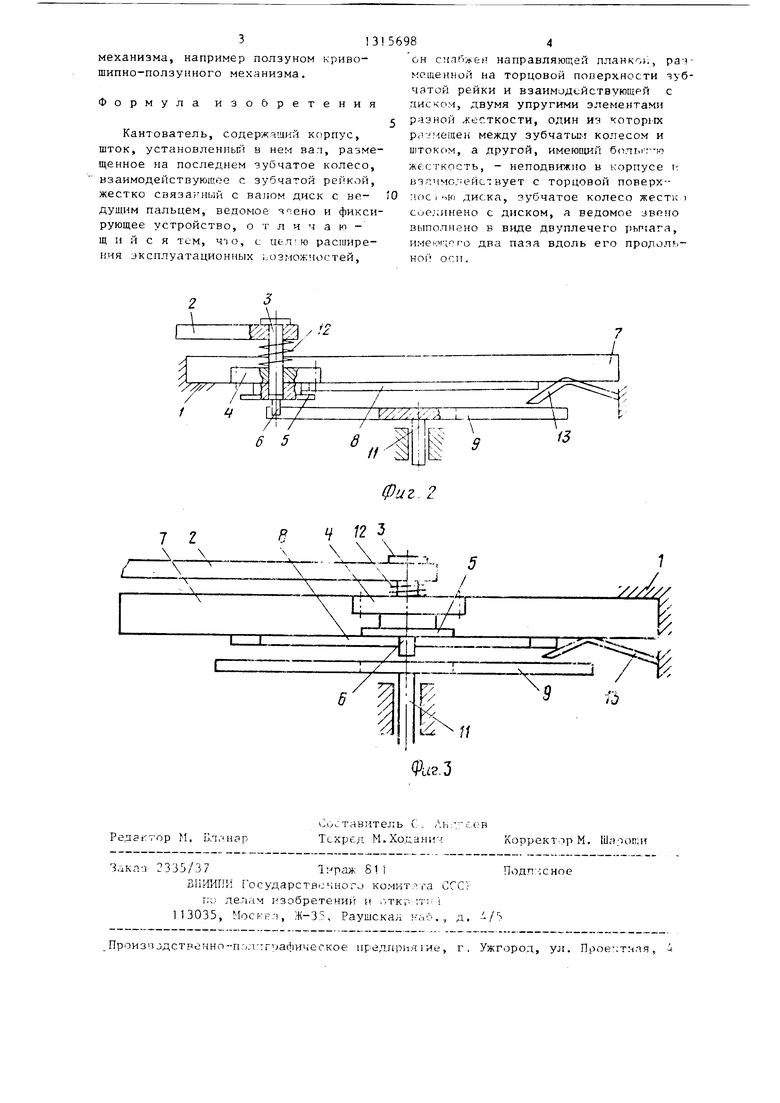
На фиг. 1 изображен кантователь, общий ВИД; на фиг. 2 - то же, вид сверху на фиг. 3 - то же, при об- оатном ходе ведомого звена.
f5 BOM положении) диск 5 деформирует упругий элемент 13. Диск 5 при этом упирается одним торцом в планку 8, а периферийной поверхностью взаимодействует с рамкой 15 фиксирующего уст20 ройства, передвигая рамку 15 вправо. Фиксирующий зуб 14 входит в паз ведомого звена 9, обеспечивая его не- , подвижность. В крайнем правом положении штока 2 диск 5 соскакивает с
Кантователь содержит корпус 1, установленный в корпусе шток 2, на валу 3 которого на подшипниках (не показано) установлено зубчатое колесо 4 . К последнему жестко прикреплен диск 5 с ведущим пальцем 6. Колесо 4 находится в зацеплении с непод- направляющей планки 8 и вместе с зуб- вижной зубчатой резцой 7, на торцо- чатым колесом 4, сжимая при этом
упругий элемент 12, передвигается по валу 3 под действием сил упругости деформированного упругого элемента 30 13 поперек зубчатой рейки в направлении от ведомого звена 9, выводя тем самым из зацепления с ведомым звеном 9 палец 6.
При обратном движении штока 2 и
вой поверхности которой жестко закреплена направляющая планка 8. Длина последней определяется крайними положениями диска 5, соответствующими началу и концу движения ведомого звена 9. На обоих концах направляющей планки 8 имеются радиусные фаски 10, выполненные с размером, чуть превышающим радиус диска 5. Это необ- 35 колеса 4 последнее вместе с диском ходимо для свободных перемещений дис- 5 возвращается в исходное положение, ка 5 и зубчатого колеса 4 в попереч- причем траектория пальца 6 - та же,
циклоида, а ведомое звено 9 неподвижно. Диск 5 при этом контактирует
ном направлении (по валу 3) в крайних положениях штока 2. Ведомое звено 9 выполнено в виде двуплечего ры- 40 направляющей планкой 8 противопо- чага, имеющего два паза вдоль его ложной торцовой поверхностью. Траек- продольной оси двухпазового мальтий- тория пальца 6 за один цикл работы ского креста и соединенного выход- мех шизма показана пунктирными лини- ным валом 11. Упругий элемент 12 раз- ями (фиг.1). При приближении зубча- мещен между штоком 2 и колесом 4. 45 колеса 4 с диском 5 к крайнему
Упругий элемент 13 закреплен в корпусе 1, причем жесткость упругого элемента 12 меньше жесткости упругого элемента 13. Фиксирующее устройство состоит из входящег о в пазы ведомого звена 9 зуба 14, закрепленного на раме 15, подвижно установленной в направляющих 16, располох ен- ных в корпусе 1 параллельно продольной оси ведомого вала 9. На выходном валу 1 1 может уставав1П1ваться захват любой известной конструкции. Кантователь работает следующим образом.
При движении штока 2 вправо зубчатое колесо 4, вращаясь, также перемещается вправо вместе с диском 5. Установленный на диске 5 ведущий
палец 6 перемещается по циклоиде и, взаимодействуя с пазом ведомого звена 9, поворачивает его па угол 180 . Центр зубчатого колеса 4 при этом перемещается на величину хода h 2 irr,где г - радиус зубчатого колеса 4. Ведомое звено 9 захватывает очередную деталь (не показано) и переносит ее из левого положения в правое. В конце рабочего хода (в крайнем пра BOM положении) диск 5 деформирует упругий элемент 13. Диск 5 при этом упирается одним торцом в планку 8, а периферийной поверхностью взаимодействует с рамкой 15 фиксирующего устройства, передвигая рамку 15 вправо. Фиксирующий зуб 14 входит в паз ведомого звена 9, обеспечивая его не- , подвижность. В крайнем правом положении штока 2 диск 5 соскакивает с
направляющей планки 8 и вместе с зуб- чатым колесом 4, сжимая при этом
5
левому положению последний передвигает рамку 15 фиксирующего устройства влево, выводя тем самым зуб 13 нз паза ведомого звена 9. В крайнем Q леном положении диск 5 соскакивает с планки 8 и, передвигаясь вместе с колсгсом 4 поперек зубчатой рейки 7 по )валу 3, вводит палец 6 в зацепление с пазом ведомого звена 9,
Далее цикл работы кантователя по- втс)ряется.
, Двпженпе штоку 2 может сообщаться от П{евмо- НЛП гидропривода. Шток 2 может быть згзеном дополнительного
3
механизма, например ползуном криво- шипно-ползунного механизма.
Формула изобретения
Кантователь, содержащий корпус, шток, установленньй в нем вал, размещенное на последнем зубчатое колесо, взаимодействующее с зубчатой рейкой, жестко связа-г иый с валом диск с ведущим пальцем, ведомое з,ено и фиксирующее устройство, о т л и ч а ю - щ и и с я тем, 4 jo., с цел-ю расширения эксплуатационных 1А)зможиостей,
56984
он направляющей планк и, рач- мещенной на торцовой поверхности зубчатой рейки и взаимодействующей с диском, двумя упругими элементами разной жесткости, один из которьгх Рсг мешен между зубчаты; 1 колесом и штокс м, а другой, имеющий жесткость, - неподвижно в корпусе i- .ействует с торцовой поверх-- 0 ;ioc 1 ью диска, зубчатое колесо жестк ) сое;;инено с диском, а ведомое звено выполнено Б виде двуплечего рьпага, имеклигто два паза вдоль его продольной осп.
.2
7 г
В V /М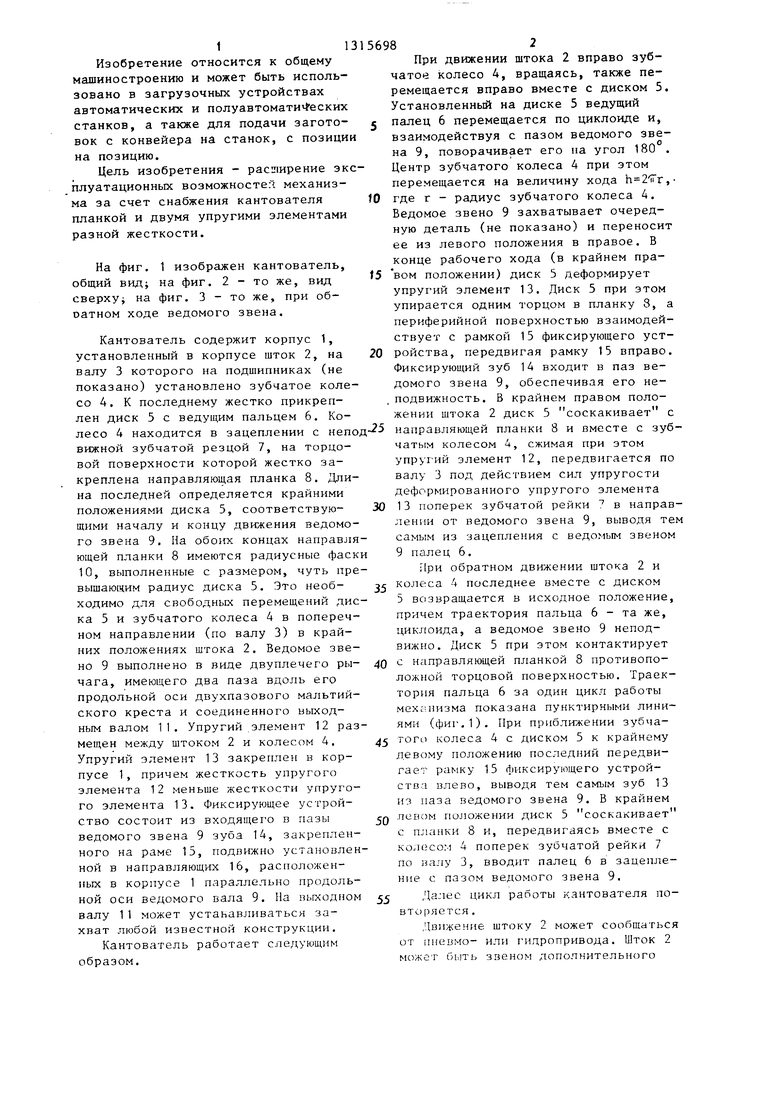
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм | 1985 |
|
SU1298462A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 2006 |
|
RU2304242C1 |
| КАНТОВАТЕЛЬ | 2019 |
|
RU2726583C1 |
| Мальтийский механизм | 1983 |
|
SU1167381A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Кантователь контейнеров к погрузчику | 1985 |
|
SU1335531A1 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| ПОСЕВНОЙ КОМБИНИРОВАННЫЙ АГРЕГАТ | 1997 |
|
RU2126199C1 |
| Устройство для смены уточных нитей к бесчелночному ткацкому станку | 1975 |
|
SU609798A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
Изобретение относится к общему машиностроению. Цель изобретения - расширение эксплуатационных возможностей за счет снабжения кантователя направляющей планкой и двумя упругими элементами разной жесткости. При движении штока 2 вправо зубчатое колесо 4, вращаясь, перемещается также вправо вместе с диском 5, при этом установленньй на диске 5 палец 6, перемещаясь по циклоиде, поворачивает ведомое звено 9 на угол 180. В конце рабочего хода диск 5 деформирует упругий элемент 13 и в крайнем правом положении штока 2 соскакивает с направлянмцей планки 8 вместе с зубчатым колесом 4, сжимая упругий элемент, вследствие чего выводится из взаимодействия с ведомым звеном 9 палец 6. Фиксирующий зуб 14 входит в паз ведомого звена 9 и обеспечивает его неподвижность. При обратном движении штока 2 и колеса 4 последнее вместе с диском 5 возвращается в исходное положение, причем траектория движения пальца 6 - та же циклоида, но при этом ведомое звено 9 неподвижно, так как диск 5 контактирует с направляющей планкой 8 другой торцовой стороной, и палец 6 не достает до ведомого звена 9. В крайнем левом положении штока 2 диск 5 соскакивает с планки 8 и, передвигаясь вместе с колесом 4 по валу 3, вводит в зацепление с пазом ведомого звена 9 палец 6. 3 ил. f5 (Л ю СП OD СО 00 фиг. 1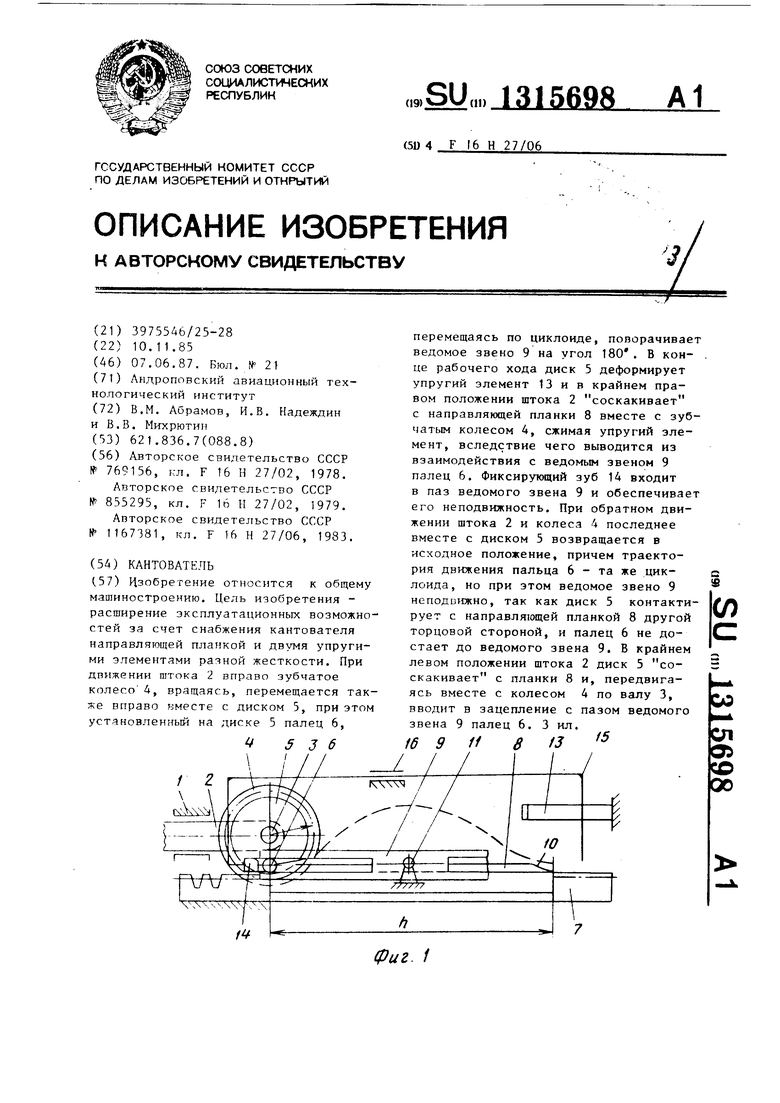
Редактор М. ъланар
CuiiraBHTejib i..,, Ль: ,: ;:,ев Техред, М.Ходанич
Заказ 2335/371нраж 81 1
ВНШПИ Государственного комитета СССУ
г;и делам изобретенирг и . ткрп -: i 113035, МоскЕл, Ж-35, Раушская нао., д. TГТроиза дстренно--пол:тг1 афическое предприятие, г, Ужгород, ул. Прое:;тмяя5 i
Корректор М. Шароши
Подп:-:сное
| Зубчато-реечный цевочный механизм в.п.саблина | 1978 |
|
SU769156A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Зубчато-реечный цевочный механизм В.П.Саблина | 1979 |
|
SU855295A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Мальтийский механизм | 1983 |
|
SU1167381A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
