Изобретение относится к области авиационной техники, а именно к системам управления самолетом, содержащим рулевые приводы с ограниченной максимальной скоростью перемещения выходного звена.
Современные самолеты оснащаются высокоавтоматизированными системами управления. Управляющие сигналы преобразуются в отклонение рулевых поверхностей с помощью следящих приводов, которые имеют ограниченную скорость отклонения. Выход привода на максимальную скорость отклонения может стать причиной потери устойчивости замкнутой системы «самолет-летчик» и привести к возникновению опасного явления раскачки самолета летчиком.
Целью изобретения является обеспечение работы рулевого привода в линейной области, что позволяет избежать возникновения явления раскачки самолета летчиком и повысить точность выполнения задач пилотирования.
Известны аналогичные префильтры, обеспечивающие подавление явления раскачки самолета летчиком (Rundqwist, L., and Hillgren, R., “Phase Compensation of Rate Limiters in JAS 39 Gripen,” AIAA Paper 96-3368, July 1996), патенты RU 2 372 250 C1, В64С 13/18, публ. 2009.11.10; RU 2734153 C1, B64C 13/00, публ. 2020.10.13.
Рассмотренные варианты префильтров обладают недостатками – они не обеспечивают полного подавления выхода привода на максимальную скорость отклонения, а в их структуре содержатся фильтры, вводящие дополнительное фазовое запаздывание.
Ближайшим аналогом является изобретение RU 2 734 153 C1. Нелинейное корректирующее устройство для систем автоматического управления содержит фильтр, два нелинейных блока, два усилительных блока, фильтр, два сумматора, масштабирующий блок, интегратор, блок вычисления обратной величины, датчик сигнала постоянного уровня, соединенные определенным образом. К его недостаткам можно отнести наличие линейных фильтров, вводящих дополнительное фазовое запаздывание, а также большое число нелинейных элементов.
Заявляемое устройство содержит три блока суммирования сигналов, два блока коэффициентов усиления, нелинейный элемент типа «насыщение», интегрирующее звено.
Ключевым отличием предлагаемого изобретения является использование сигналов потребной и располагаемой скоростей движения выходного звена модели привода, вычисляемых в контуре префильтра. Техническим результатом предлагаемого префильтра является отсутствие дополнительного фазового запаздывания в системе, что приводит к отсутствию необходимости введения компенсирующих линейных фильтров. Нелинейный префильтр обеспечивает работу рулевого привода в линейной области, что позволяет повысить точность выполнения задач пилотирования и избежать возникновения раскачки самолета летчиком.
Заявленный технический результат достигается тем, что нелинейный префильтр, обеспечивающий подавление явления раскачки самолета летчиком содержит три сумматора, два масштабирующих коэффициента усиления, нелинейный элемент типа «насыщение» и интегрирующее звено; неинвертирующие входы первого и второго сумматоров являются входом префильтра, выход второго сумматора соединен с входом первого коэффициента усиления, выход первого коэффициента усиления соединен с входом нелинейного элемента, выход нелинейного элемента соединен с входом интегрирующего звена; первый инвертирующий вход второго сумматора соединен с выходом интегрирующего звена; выход первого коэффициента усиления соединен с входом нелинейного элемента и с неинвертирующим входом третьего сумматора, выход нелинейного элемента соединен с инвертирующим входом третьего сумматора, выход третьего сумматора соединен с входом второго блока коэффициента усиления, на выходе второго блока коэффициента усиления соединен с вторым инвертирующим входом второго сумматора и инвертирующим входом первого сумматора; выход первого сумматора является выходным сигналом префильтра.
Принцип работы префильтра основан на использовании в его контуре упрощенной модели привода, включающей в себя ограничитель максимальной скорости движения выходного звена. Входным сигналом префильтра является сигнал, сформированный системой управления. На основе рассогласования сигналов на входе и выходе нелинейного элемента формируется корректирующий сигнал, который вычитается из сигнала от системы управления, и полученная разность, проходя через масштабирующий коэффициент усиления, является управляющим сигналом рулевого привода. Корректирующий сигнал также подается на вход сумматора в контуре модели привода, обеспечивая синхронизацию сигналов рулевого привода и префильтра.
Сущность изобретения поясняется графическим изображением.
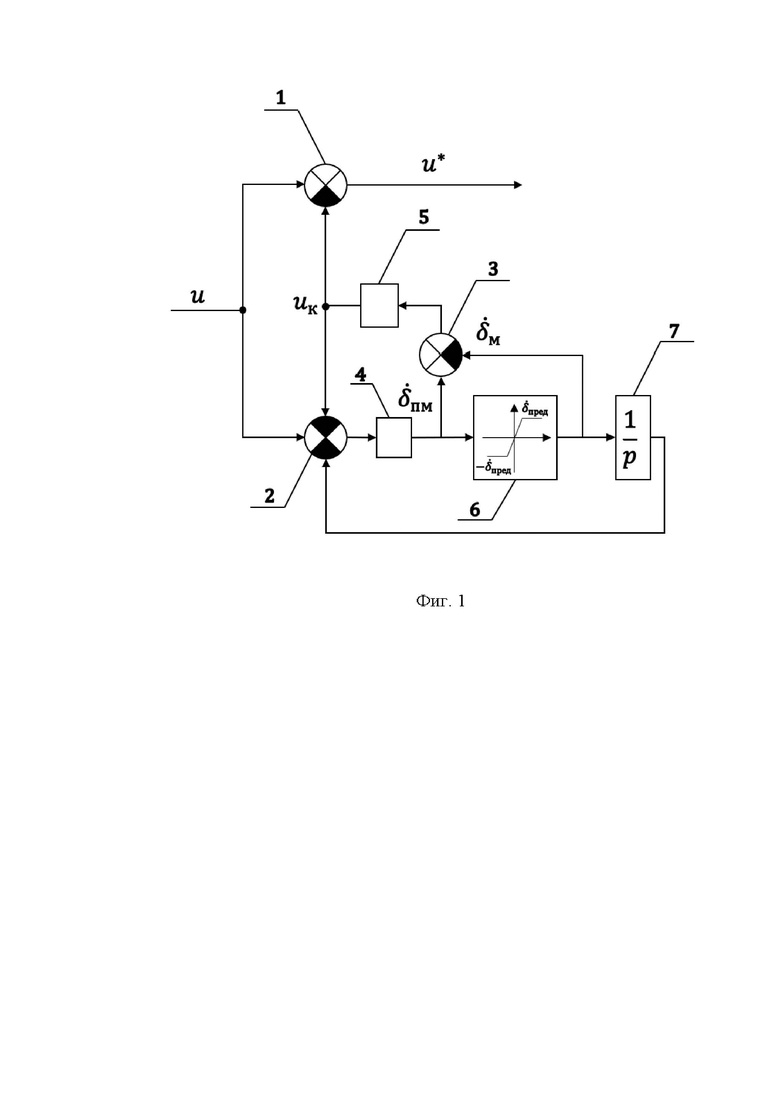
На фиг. 1 показана структурная схема нелинейного префильтра.
На фиг. 1 используются следующие обозначения:
u – сигнал, сформированный системой управления;
uк – корректирующий сигнал;
u* - сигнал, поступающий на вход рулевого привода;
δ ̇_пм – сигнал на входе нелинейного элемента;
δ ̇_м – сигнал на выходе нелинейного элемента;
δ ̇_пред – ограничение величины сигнала в нелинейном элементе;
p – оператор Лапласа;
1 – первый сумматор;
2 – второй сумматор;
3 – третий сумматор;
4 – первый блок коэффициента усиления;
5 – второй блок коэффициента усиления;
6 – нелинейный элемент типа «насыщение»;
7 – интегрирующее звено.
Устройство содержит три сумматора (1,2,3), два масштабирующих коэффициента усиления (4,5), нелинейный элемент типа «насыщение» и интегрирующее звено (7). Префильтр находится во внутреннем контуре системы управления летательным аппаратом перед приводом рулевой поверхности. На неинвертирующие входы сумматоров 1 и 2 поступает сигнал u, сформированный системой управления, являющийся заданным отклонением рулевых поверхностей. Сигнал, сформированный сумматором 2 поступает на вход первого коэффициента усиления 4. Выходной сигнал коэффициента усиления 4 является сигналом δ ̇_пм, поступающим на вход нелинейного элемента 6. Ограничения в нелинейном элементе 6 задаются на основе параметров привода руля летательного аппарата. Сигнал δ ̇_мна выходе нелинейного элемента 6 поступает на вход интегрирующего звена 7. На первый инвертирующий вход сумматора 2 поступает сигнал, сформированный интегрирующим звеном 7. Корректирующий сигнал uк формируется следующим образом – сигнал δ ̇_пм на входе нелинейного элемента 6 поступает на вход сумматора 3, сигнал δ ̇_пм на выходе нелинейного элемента 6 поступает на инвертирующий вход сумматора 3. Выходной сигнал сумматора 3 поступает на вход блока коэффициента усиления 5. Выходной сигнал блока коэффициента усиления 5 является корректирующим сигналом uк. Корректирующий сигнал uк равен нулю, если сигнал δ ̇_пм на входе нелинейного элемента равен сигналу δ ̇_м на выходе нелинейного элемента. В противном случае, сигнал uк принимает ненулевое значение и подается на второй инвертирующий вход сумматора 2 и инвертирующий вход сумматора 1. Сумматор 1 формирует сигнал, поступающий непосредственно на вход рулевого привода u*. Корректирующий сигнал позволяет не допустить выхода привода на максимальную скорость отклонения, тем самым обеспечивая подавление раскачки самолета летчиком.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ | 2014 |
|
RU2542686C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383467C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
Нелинейный префильтр содержит три сумматора (1, 2, 3), два масштабирующих коэффициента усиления (4, 5), нелинейный элемент (6), интегрирующее звено (7), соединенные определенным образом. Обеспечивается повышение точности пилотирования и возможность избегания раскачки самолета летчиком. 1 ил. 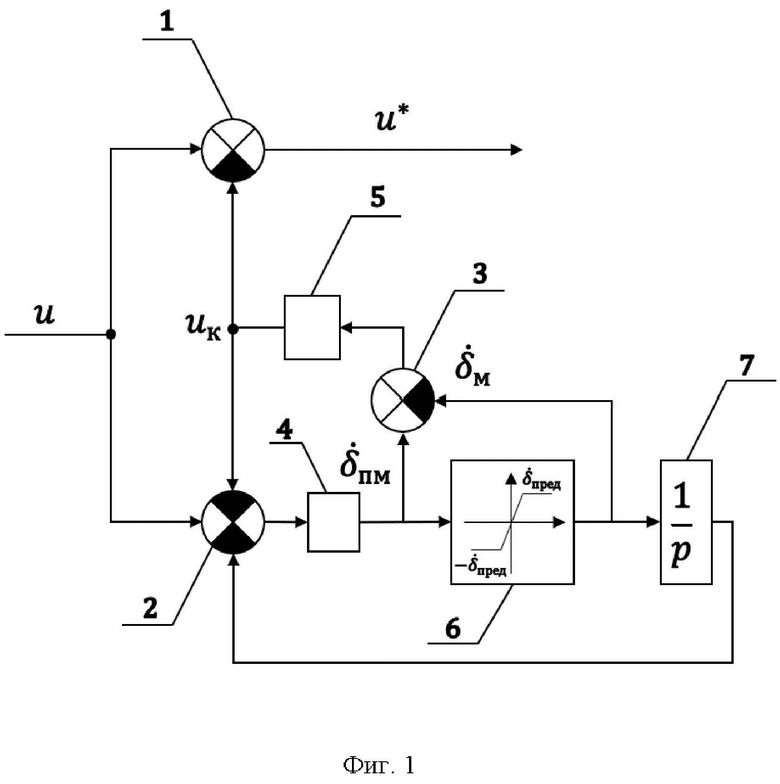
Нелинейный префильтр, обеспечивающий подавление явления раскачки самолета летчиком, содержит три сумматора, два масштабирующих коэффициента усиления, нелинейный элемент типа «насыщение» и интегрирующее звено; неинвертирующие входы первого и второго сумматоров являются входом префильтра, выход второго сумматора соединен с входом первого коэффициента усиления, выход первого коэффициента усиления соединен с входом нелинейного элемента, выход нелинейного элемента соединен с входом интегрирующего звена; первый инвертирующий вход второго сумматора соединен с выходом интегрирующего звена; выход первого коэффициента усиления соединен с входом нелинейного элемента и с неинвертирующим входом третьего сумматора, выход нелинейного элемента соединен с инвертирующим входом третьего сумматора, выход третьего сумматора соединен с входом второго блока коэффициента усиления, выход второго блока коэффициента усиления соединен с вторым инвертирующим входом второго сумматора и инвертирующим входом первого сумматора; выход первого сумматора является выходным сигналом префильтра.
| Ефремов А.В | |||
| Персп | |||
| средства подавл | |||
| раскачки самолета летчиком | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| US 5669582 A1, 23.09.1997. | |||

