ЙЙ/ё.У
Изобретение относится к машиностроению, в частности к конструкции захватных стройств промышленных роботов и манипуляторов.
Цель изобретения - снижение габаритно-массовых характеристик, расширение ехнологических возможностей; за счет захвата деталей за внутреннюю или внешнюю поверхности, повышение точности позиционирования цилиндрических деталей отноительно центра захвата; .
На фип1 изображено центрирующее захватное устройство, поперечный разрез
вух исполнений: на фиг,2 - захватный элементустройства в положении захвата детали по внешнему;Дйаметру; на фиг.З изображено зШватное устройство (модуль-секция) в поло- захвата детали за внешнюю и внут-: поверхно сти; на фйг,4- изображенр уетройства составленное из нескольких модулей-секций ; V v //::
, Цёнтрируюш.ёё захватное устройство; (каждый мр дуль-секцйя устройства), соде р- анДее )|епЬлноповЬрот;ный/моментный двигатель, включающий, корпус 1 с крышками 2, вал 3, выполненный, например, в варианте исполнения устрЬйства полым, рабочие лопасти 4V жестко скрепленные с валом 3. Рабочие полоски Двигателя разделеныперегородками 5, скрепленными с корпусом 1. Рабочая среда подводится через каналы подвода и слива 6, 7; Рабочие лопасти 4 выполнены в 1йиде секторов круговых; колец, на периферии которых образованы коаксиал но пазы. Часть поверхности пар составляют зубчатШ с ктрргГВ, в аимрдей- ствунзщиё с естернямй 9Гэйкреплёнными. неподвижно наi валах 10 захватный элементов 11, ;,;. ..i- : -.: -. : . : -;:
В варианте испопненйя захватного устройства захватный элеЙёнтИ 1: подпружинен относительно рей крепления (вала 10) (;тврм пружинь сжатия 12, опёртой одним своим концом на Элемент 11, а вторым - на втулку 13, неподвижно закреплен- йую на валу.З; v .;, -
Размер по диаметру зубчатого сектора 8 определен тем, что в крайнйх-положениях сектора шестерня Э разворачивает захватный элемент Т1 для захвата детали 14 за внешнюю поверхность (см. фиг.2) или за внутреннюю поверхность, при этбм продольная ось элемента11 совмещается ; радиусом корпуса 1 двигателя,
В варианте устройства в каждой лопасти коаксиально могут быть выполнены по два паза с секторами 8, при этом с каждым сектором взаимодействует шестерня 9 одного из захватных элементов для одновременного захвата, например, полой цилиндрической
детали 14 за внутреннюю и внешнюю поверхность.
Центрирующее захватное устройство работает следующим образом.
При соединении, например канала 6 с напорной магистралью, а канала 7 - со сливной, рабочая лопасть 4 разворачивается против часовой стрелки из нейтрального положения, изображенного на фиг.1, или из
0 крайнего правого положения.
При развороте лопастей 4 происходит поворот скрепленного с лопастью; вала 3. В положении, изображенном на фиг, 1 .захватный элемент. 11 занимает промежуточное
5 положение, при котором его продольная ось перпендикулярна, например, продольной оси лрпзсти 4.
В зависимости от характера крепления захватного элемента 11, т.е. его ориентиро0 ванйя относительно центра захвата (вала 10)
влево или вправо по чертежу происходит
разворот элемента 11 в положение захвата
детали 14, : :: : V . ,-ч,:-.. : ,- .:
При ориентировании элемента 11 впра5 во по чертежу (фиг.1) происходит его развод ррт по часовой стрелке. При этом зубчатый сектор 8 взаимодействует со скрепленной с валом 10 шестерней 9 элемента 11. Поворачиваясь относительно оси крепления, эле0 мент 11 захватывает в рассматриваемом случае деталь .14 заi ее внефнюю поверхность (положение изображено на фиг,2 и 3, 4 левые части). ; .;:.:: -. ,-... -. Для захвата полой детали 14 за её внут5 рённюю поверхность давление рабочей среды подается в канал 7, а канал 6 соединяется срсливом. Лопасть 4 из положения, изобра- , Генного на фиг. 1,;йди крайнего левого положения разворачивается по часовой
0 стрелке, при этом связанный с ней элемент 11 развррачивает ся пр(этив часовой стрелки до достижения Положения захвата детали 14 за ее внутреннюю поверхность (положение захвата на фИг.З и 4, правые части).
5 Центрирование детали 14 относительно ; оси захватного уетрбйства, т.е. базирование в устройстве, осуществляется за счет перемещения детали 14 элементами 11 при своем развороте до совпадения оси захватного
0 устройства и центра цилиндрической детали 14.: . -.-
При центрировании и захвате детали 14 происходит сжатие пружин 12.
Для захвата длинномерных деталей 14
5 или деталей с различными размерами внутренних и внешних диаметров захватное устройство составляется из модулей-секций, скрепленных между собой общим полым валом 3 (фиг.4) шли иными несущими элементами, например шпильками. Модули-секции
могут быть выполнены в одном захватном устройстве различного диаметра, как внешнего, так и внутреннего.
Ф о р м ула изобретения 1. Захватное устройство, содержащее полый корпус, в котором смонтированы шестерни осей зажимных органов, имеющие возможность взаимодействия с выходным звеном привода их поворота, выполненного в виде зубчатого элемента, при этом зажимные органы выполнены в виде эксцентриков и подпружинены относительно оси крепления, о т л и ч а ю щ е е с я тем, что, с целью снижения массогабаритных характеристик, полый корпус снабжен радиальными перегородками, разделяющими корпус на секто0
ра с направляющими, обряЗуемы ми корпусными стенками, каждый сектор соединен двумя магистралями с источниками сжатого воздуха, а привод зажичмных органов выполнен в виде смонтированной в каждом секторе соответствующей каждому зажимному органу лопасти, имеющей возможность двухстороннего перемёгцения в из рэвлйкэ-- щих сектора под действием сгкато о воздуха, причем в лопасти выполнен участок с врзмря йост ю в ймодействия с шестерней зажимного органа.
2, Устройстео по п. 1, о т л и ч а э щ е е-- с я тем, что зубчатые участки лопастей выполнены по концентричным относительно центра устройства окружностям.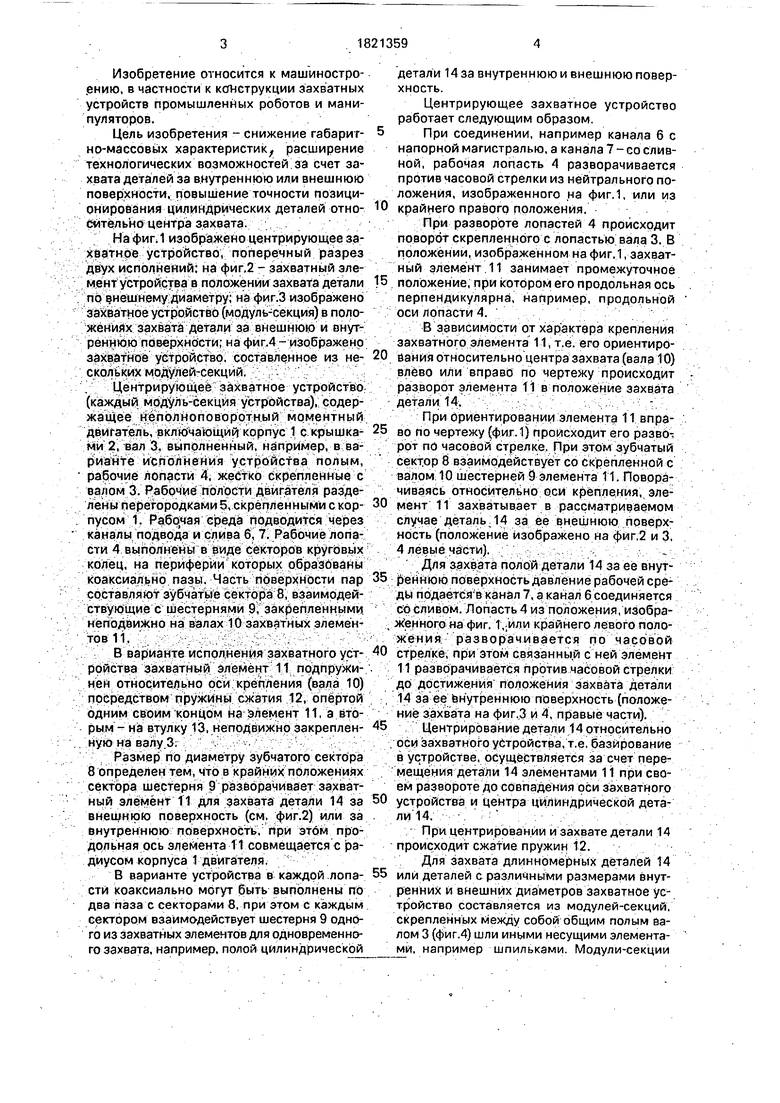

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1982 |
|
SU1069989A1 |
| Шлифовальный станок | 1980 |
|
SU903082A1 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
| Автооператор | 1988 |
|
SU1593905A1 |
| Захват манипулятора | 1979 |
|
SU837855A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| Устройство для шлифования деталей круглого сечения | 1985 |
|
SU1321559A1 |
| Устройство для перемещения деталей | 1985 |
|
SU1255432A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |

Изобретение относится к машиностроению, в частности к конструкции захватных устройств промышленных роботов и манипуляторов. Захватное устройство содержит корпус 1, вал 3, рабочие лопасти 4. Для подвода рабочей среды служат каналы 6, 7. На периферии лопастей 4 образованы пазы с зубчатыми секторами 8, вЭ;аймодействую- щме с шестернями 9 захватных элементов 11, закрепленных на осях 10. При подачей рабочей среды в каналы 6 или 7 происходит разворот лопастей 4 и разворот элементов 11, захватывающих деталь 14 за внутреннюю или внешнюю цилиндрическую поверхности. 1 з.п. ф-лы, 4 ил. ел с оо ю «9 Сл ся о 
(р#г.2
фигА
| Схват манипулятора | 1986 |
|
SU1366393A1 |
