Изобретение относится к устройствам, предназначенным для плавания под водой и погружающимся на большие глубины.
Существующие устройства глубоководного погружения - имеют обычно два цилиндрических в поперечном сечении корпуса: наружный и внутренний [1].
Внутренний корпус - для размещения экипажа и соответствующих устройств - изготавливается из особого материала, способного выдерживать значительные внешние воздействия. Наружный корпус служит для предохранения от механических повреждений различного рода коммуникаций, находящихся между внутренним и наружным корпусом. При этом наружный корпус проницаемый и давление воды на внешнюю и внутреннюю поверхности наружного корпуса одинаково. Кроме этого наружный корпус придает дополнительную жесткость внутреннему корпусу.
Другим примером является батискаф (Диомидов М.Н., Дмитриев А.Н. Подводные аппараты. Ленинград.: Судостроение. 1966.). Он состоит из легкого корпуса - поплавка, заполненного более легким, чем вода, наполнителем (бензином) и стального шара - гондолы, в которой размещается экипаж, аппаратура управления, система регенерации воздуха и т.д. В поплавке находятся также цистерны с балластом и аккумуляторные батареи. Плавучесть батискафа регулируется сбрасыванием твердого балласта и выпуском бензина из маневровой цистерны.
Недостатком существующей конструкции является ограниченная глубина погружения. Для увеличения глубины погружения необходимо либо:
а) уменьшить диаметр внутреннего корпуса (при этом ухудшается тактико-технические данные и устройство не сможет выполнять возложенные на него задачи);
б) увеличить толщину внутреннего корпуса (увеличение толщины стенки свыше 100 мм невозможно по техническим причинам);
в) поиск новых материалов с большим значением модуля сдвига G и малым значением коэффициента Пуассона μ (пока эти показатели у применяемых твердых сплавов не очень высоки по сравнению с обычной сталью).
Заявляемый объект содержит непроницаемый корпус, выполненный предварительно напряженным на растяжение внешними по отношению к нему устройствами.
Технический результат, получаемый при осуществлении заявляемого объекта, заключается в уменьшении сжимающих напряжений, появляющихся в непроницаемом корпусе при глубоководном погружении.
Ограничительные признаки: наружный проницаемый корпус и внутренний непроницаемый корпус.
Отличительные признаки: внутренние проницаемые оболочки с натяжными устройствами на внутренний непроницаемый корпус.
Причинно-следственная связь между совокупностью существенных признаков заявляемого объекта и достигаемым техническим результатом заключается в следующем.
С помощью канатной системы, связывающей внутренний и наружный корпуса или проницаемых оболочек, имеющих диаметр больший, чем внешний диаметр непроницаемого корпуса, создается напряженное состояние растяжения определенной величины, которое, при погружении подводного аппарата, уменьшает сжимающие напряжения, вызываемые в капсуле внешним давлением окружающей воды. При необходимости может быть использована система из оболочек большего диаметра, чем первая, растягивающая последнюю при помощи аналогичных болтовых соединений, и, тем самым, увеличивающих растягивающее усилие поверхности капсулы.
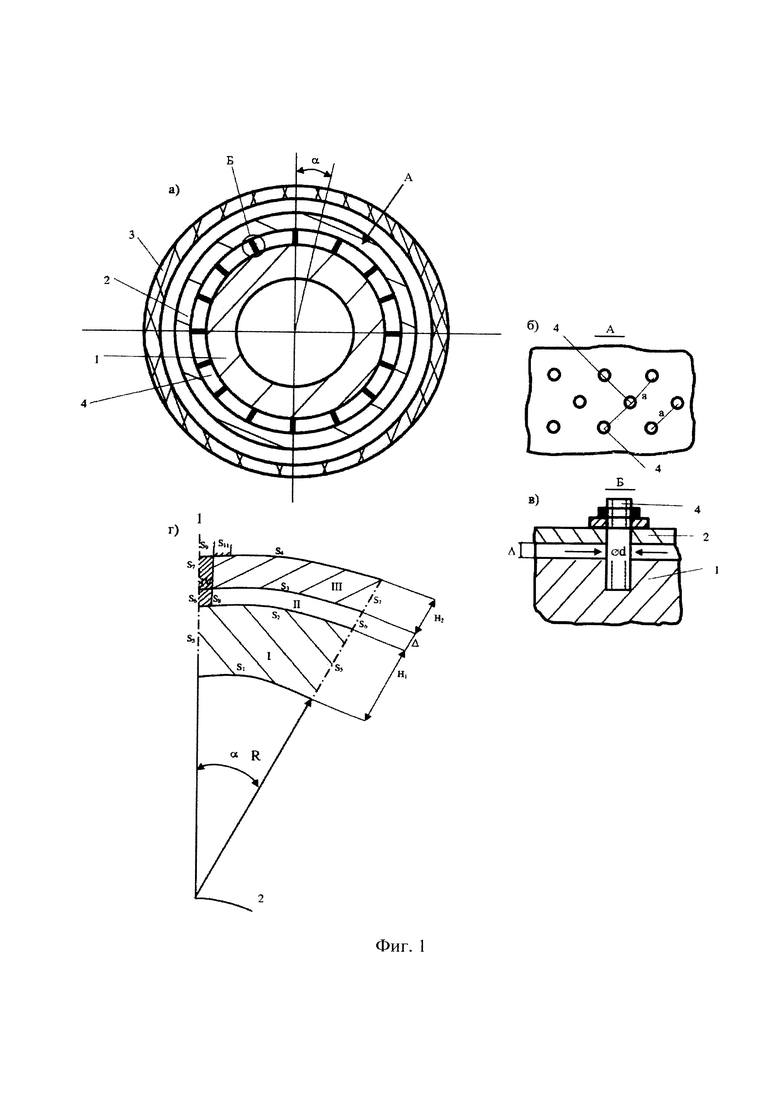
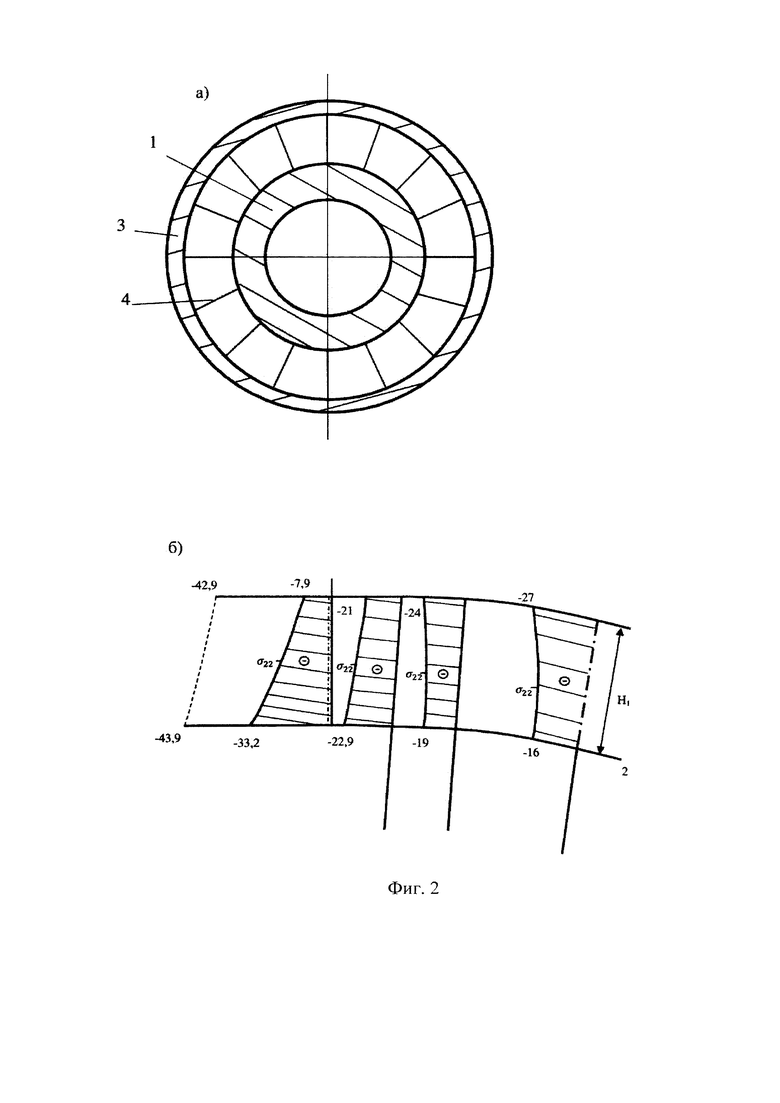
На фиг. 1, 2 изображены схемы устройств и результаты численных расчетов. На фиг. 1а приведена внешняя схема устройства с одной проникающей опорной оболочкой; на фиг. 1б - фрагмент поверхности в продольном направлении; на фиг. 1в - крепление проникающей опорной оболочки к корпусу капсулы; на фиг. 1г - схема расчета устройства. На фиг. 2 приведена схема растяжения внутреннего корпуса канатной системой (фиг. 2а) и результаты расчетов (фиг. 2б).
Корпус для глубоководного погружения обитаемого аппарата состоит из внутреннего непроницаемого корпуса 1, проницаемой опорной оболочки 2 (нескольких оболочек или канатной системы), наружного проницаемого корпуса 3, натяжных элементов 4 (фиг. 1, 2).
Работа устройства.
Непроницаемый корпус 1 упруго растягивается натяжными элементами 4 через опорную проницаемую оболочку 2, создающими предварительно напряженное состояние растяжения в стенках капсулы.
При погружении глубоководного аппарата вода проникает через наружный корпус 3 и оболочки 2 к непроницаемому корпусу 1, оказывая в стенках корпуса всестороннее сжатие. Но, так как стенки корпуса предварительно имели напряженное состояние растяжения, то величина сжимающих напряжений в стенках корпуса будет меньше, чем, если бы подводный аппарат не имел предварительного нагружения растяжения, а, следовательно, можно осуществлять безаварийное погружение на большую глубину. Проницаемой опорной оболочкой могут быть обручи различной ширины, расположенные на расчетном расстоянии вдоль капсулы, если она цилиндрической формы.
Приведем пример расчета корпуса субмарины в случае применения проницаемой опорной оболочки. Ввиду симметрии, рассмотрим в поперечном сечении часть кольца с центральным углом α (фиг. 1г), имея ввиду, что следующий болт в сечении находится на расстоянии, соответствующему углу 2α, будем полагать, что перемещение вдоль х3 отсутствует, то есть рассматривается плоское деформированное состояние, в соответствие с которым U3=0, σ31=σ32=0; ε13х=ε23=ε33=0, где U3 - перемещение по координате х3, σij - напряжения; εij - деформации. На фиг. 1г: I - оболочка непроницаемого корпуса, II - область залитая водой, в которой давление равно внешнему, III - опорная проницаемая оболочка.
В соответствие с линейной теорией упругости в Эйлеровой системе координат запишем следующие уравнения:
1. Уравнение равновесия

2. Уравнение состояния (закон Гука)

3. Уравнение сохранения массы

где G - модуль сдвига, k - коэффициент объема сжатия, σ - гиростатическое напряжение; приняты тензорные обозначения (суммирование по повторяющимся индексам i, j; 
Граничные условия (фиг. 1г)

Здесь Р0 - давление в обитаемом аппарате, Р1 - давление воды, Р2 - давление на S9, Р3 - давление на S11. Давление Р2 формализуем как давление растяжения, оказываемое на корпус через болтовое соединение 4 (фиг. 1в), Р3 - давление гайки болтового соединения (фиг. 1в) на поверхность S11 проницаемой опорной оболочки.
Решение системы (1, 2, 3) с учетом граничных условий (4) осуществлялось численным методом по алгоритмам [2] и программам [3].
Результаты решения задачи.
Принято: R=5000 мм; Н1=70 мм; Н2=20 мм; Δ=5 мм; dб=40 мм; dш=80 мм; α=2,9°. Глубина погружения 1000 м.
Здесь R - внутренний радиус непроницаемой оболочки, H1 - толщина непроницаемой оболочки, Н2 - толщина проницаемой опорной оболочки, Δ - зазор между оболочками 1 и 3, dб - диаметр болта, dш - диаметр шайбы, материал (сплав «АК-32»): G=18000 кг/мм2, k=0,0139.
Для простоты принято, что непроницаемый корпус, проницаемая оболочка и болт выполнены из одного материала.
По нижней границе примем, что при затяжке в сечении болта напряжение растяжения будет σб=5 кг/мм2, тогда на шайбу, при заданных размерах будет среднее давление в 3 раза меньше. Значит, получим: Р2=σб-P1; P3=σш+Р1;
На фиг. 2б представлены некоторые результаты расчета при Р0=0,01 кг/мм2, Р1=1 кг/мм2, Р2=4 кг/мм2, Р3=2,6 кг/мм2.
Наибольшим сжимающим напряжением является σ22. Пунктирной линией показана эпюра σ22 по сечению непроницаемой оболочки, когда субмарина имеет только наружный и внутренний корпуса (как в прототипе). Оно примерно одинаково по всему сечению и составляет 43 кг/мм2 (цифры на фиг. 2б приведены в кг/мм2).
Сплошными линиями на фиг. 2б приведены эпюры σ22 по сечению корпуса при наличии опорной проницаемой оболочки. Видим, что сжимающие напряжения σ22 намного меньше (по абсолютной величине) по предлагаемому способу с применением проницающей оболочки, чем по способу и устройству прототипа.
ЛИТЕРАТУРА
1. Барабанов Н.В. Конструкция корпусов судов: Судостроение, 1985. - 540 С.
2. Одиноков В.И., Каплунов Б.Г., Песков А.В., Баков А.А. Математическое моделирование сложных технологических процессов. М.: Наука, 2008. - 176 С.
3. Свидетельство о государственной регистрации программы для ЭВМ №2012661389. ОДИССЕЙ // Одиноков В.И., Прокудин А.Н., Сергеева A.M., Севастьянов Г.М. Зарегистрировано в Реестре программ для ЭВМ 13.12.2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИТЕЙНАЯ МНОГОСЛОЙНАЯ ОБОЛОЧКОВАЯ ФОРМА | 2024 |
|
RU2828801C1 |
| ПОДВОДНЫЙ ПАРУСНЫЙ КАТАМАРАН И ЕГО СПОСОБ ЛИДИРОВАНИЯ | 1997 |
|
RU2170190C2 |
| ЛИТЕЙНАЯ МНОГОСЛОЙНАЯ ОБОЛОЧКОВАЯ ФОРМА | 2024 |
|
RU2830086C1 |
| СПОСОБ ПОДГОТОВКИ МЕТАЛЛИЧЕСКОЙ ЛИТЕЙНОЙ ФОРМЫ К ЗАЛИВКЕ МЕТАЛЛОМ | 2024 |
|
RU2841324C1 |
| ТОРОВЫЙ ШПАНГОУТ | 2017 |
|
RU2657719C1 |
| Мартенситный двигатель | 1988 |
|
SU1615440A1 |
| Корпус глубоководного аппарата из композиционных материалов | 2017 |
|
RU2649117C1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ГИДРОФОН С КОМПЕНСАЦИЕЙ СТАТИЧЕСКОГО ДАВЛЕНИЯ | 2019 |
|
RU2724296C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2524514C1 |
| ГЛУБОКОВОДНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2021 |
|
RU2758999C1 |
Изобретение относится к устройствам, предназначенным для плавания под водой и погружающимся на большие глубины. Корпус обитаемого аппарата для глубоководного погружения состоит из внутреннего непроницаемого корпуса и наружного проницаемого корпуса. Непроницаемый корпус выполнен предварительно напряженным на растяжение внешней по отношению к нему канатной системой или опорной оболочкой. Достигается уменьшение сжимающих напряжений, появляющихся в непроницаемом корпусе при глубоководном погружении. 3 з.п. ф-лы, 2 ил.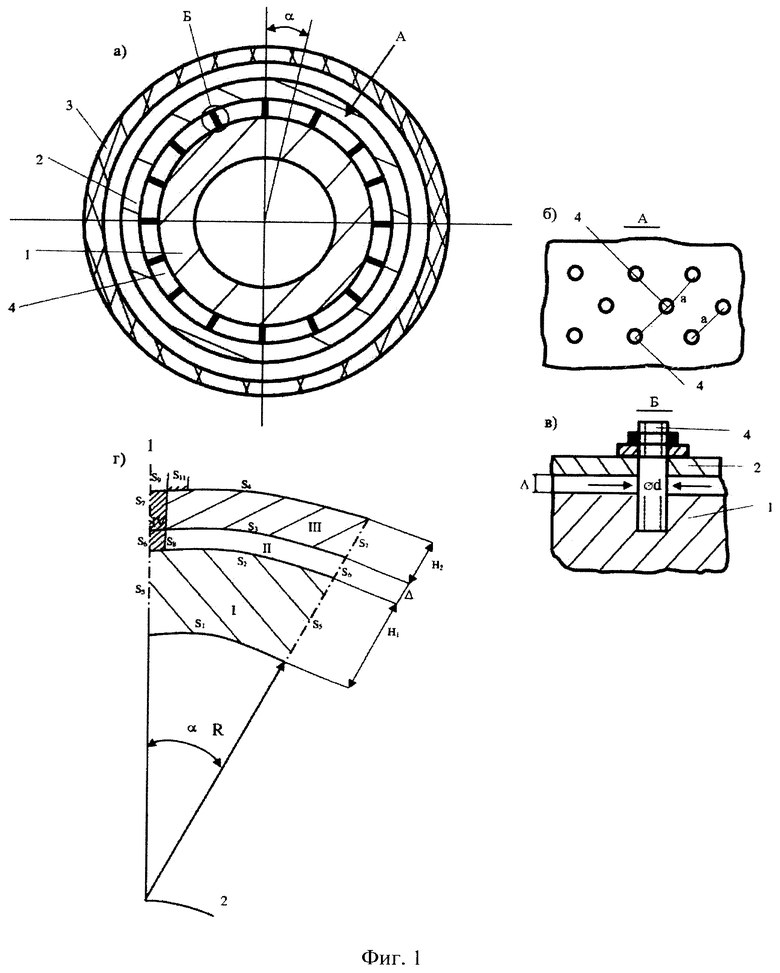
1. Корпус обитаемого аппарата для глубоководного погружения, состоящий из внутреннего непроницаемого корпуса и наружного проницаемого корпуса, отличающийся тем, что непроницаемый корпус выполнен предварительно напряженным на растяжение внешней по отношению к нему канатной системой или опорной оболочкой.
2. Корпус по п.1, отличающийся тем, что наружную поверхность непроницаемого корпуса облегает с зазором проницаемая опорная оболочка, снабженная устройствами для растяжения поверхности непроницаемой капсулы.
3. Корпус по п.2, отличающийся тем, что в качестве проницаемой опорной оболочки могут быть использованы металлические обручи, расположенные вдоль аппарата, снабженные устройством, растягивающим поверхность непроницаемого корпуса.
4. Корпус по п.1, отличающийся тем, что внутренний и наружный корпуса аппарата связаны между собой системой канатов, имеющих механизмы натяжения.
| Датчик магнитного расходомера | 1961 |
|
SU149901A1 |
| ПОДВОДНОЕ СУДНО | 2016 |
|
RU2702464C1 |
| RU 2017139956 A, 17.05.2019 | |||
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ АВТОМАТИЗИРОВАННОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2007 |
|
RU2434766C2 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И ТРАНСПОРТИРОВАНИЯ ВЯЗКОУПРУГОПЛАСТИЧНЫХ И ВЯЗКОПЛАСТИЧНЫХ ПИЩЕВЫХ МАСС | 2004 |
|
RU2264713C1 |

