ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области медицинских инструментов и, в частности, к системе визуализации для хирургического робота и к хирургическому роботу.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Внедрение хирургических роботов соответствует тенденции разработок в области прецизионной хирургии, и хирургические роботы могут применяться как мощные вспомогательные средства хирургов. Например, хирургические роботы Да Винчи (Da Vinci) внедрены во многих крупных больницах по всему миру, чтобы обеспечить многочисленные преимущества для пациентов, включая минимизацию травматизма, уменьшение кровотечения и быстрое восстановление.
В области медицины, хирургические роботы предназначены для выполнения комплексных хирургических операций минимально инвазивным способом. Применение хирургических роботов вместо традиционных хирургических инструментов может решить множество различных проблем традиционной хирургии, так как они могут радикально справиться с ограничениями человеческого глаза благодаря более четкому представлению внутренних органов оперирующему хирургу, использующему технологию стереоскопической визуализации. Роботизированные руки могут выполнять 360-градусное вращение, сдвиг, поворот, сжатие и другие сложные действия, которые трудно выполнять человеку, даже в зонах, не доступных для человеческих рук, и устранять проблему дрожания. Хирургические роботы приобрели большую известность среди хирургов и пациентов и нашли широкое применение для различных клинических хирургических операций, благодаря их преимуществам, включающим в себя минимальный травматизм, малое кровотечение, быстрое восстановление, значительно сокращенное пребывание в больнице и намного более высокие показатели выживаемости и восстанавливаемости в послеоперационный период.
В современной хирургической практике, как оказалось, не совсем удобно полагаться только на устройство стереоскопической визуализации, смонтированное на консоли хирурга, так как неизменное расположение системы визуализации на консоли снижает ее гибкость и возможность взаимодействия с телом пациента и может приводить к усталости и утомлению с течением времени. Для преодоления этой проблемы существуют некоторые системы визуализации, дополнительно оборудованные переносным, компактным, нашлемным устройством отображения, которое можно свободно использовать для ослабления утомляемости хирурга, возникающей вследствие манипулирования хирургическим роботом, так как хирург освобождается от необходимости сохранения сидячего положения в течение длительного времени. Более того, стереоскопические эндоскопические изображения, получаемые во время хирургического вмешательства, могут одновременно и синхронно передаваться как на консоль хирурга, так и в нашлемное устройство отображения. Однако, такие нашлемные устройства отображения все еще могут создавать некоторые неудобства, такие как неудобное снятие и необходимость снимать шлем, когда требуется визуально проверить что-то еще во время процедуры.
Опубликованная китайская патентная заявка CN102186434A раскрывает трехмерную (3D) систему отображения для хирургического робота и способ управления системой. Основная идея данного предшествующего изобретения состоит в том, чтобы обеспечивать перемещение системы 3D-отображения вместе с оперирующим хирургом во время роботизированной хирургической операции таким образом, чтобы позволять оперирующему хирургу выполнять операцию, при одновременном удобном наблюдении 3D-изображения, в случае необходимости, без потребности в изменении положения своего тела или ношении устройства отображения. Хотя данное решение может в некоторой степени ослабить утомление оперирующего хирурга, система отображения в целом занимает много места, и между роботизированной рукой и дисплеем существуют значительные отклонения по положению, которые приводят к ослаблению эффекта «погружения» в работе.
Опубликованная китайская патентная заявка CN102186434A предлагает хирургическое устройство виртуальной реальности, включающее в себя систему визуализации, функционально связанную с главным корпусом, нашлемный дисплей в системе визуализации и датчики для слежения за положением и/или ориентацией в пространстве нашлемного дисплея относительно точки отсчета и, тем самым, обеспечения возможности настройки поля зрения камеры. Данный метод направлен, в основном, на способ управления камерой с использованием нашлемного дисплея. Однако, он сопряжен с проблемами усталости или утомления, возникающими, когда нашлемный дисплей носят в течение длительного времени, и неудобством снятия дисплея. Кроме того, его применение в системах визуализации для хирургических роботов ограничено.
Поэтому, в данной области техники существует потребность в системе визуализации, которая может смягчить вышеупомянутые проблемы и создать для оперирующего хирурга большее удобство и синхронизированное контрольное изображение в реальном времени, а также в соответствующем хирургическом роботе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание системы визуализации для хирургического робота, которая может создать для оперирующего хирурга ощущение большего удобства работы и ослабить утомление оперирующего хирурга.
Другой целью настоящего изобретения является создание системы визуализации для хирургического робота, которая может применяться в прикладных системах для подготовки и обучения в области хирургии и обеспечивать для оперирующего хирурга и наблюдателей наблюдение изображения одной и той же области просмотра.
Еще одной целью настоящего изобретения является создание хирургического робота, который позволяет оперирующему хирургу получать эффект погружения во время управления ведущим манипулятором, на основе системы визуализации.
Дополнительной целью настоящего изобретения является создание хирургического робота, который допускает непосредственное управление устройством получения изображения с помощью перемещаемого устройства отображения, что обеспечивает для оперирующего хирурга более удобное управление хирургическими операциями и их повышенную плавность, и высокую хирургическую эффективность.
Для достижения вышеприведенных целей, настоящее изобретение предлагает систему визуализации для хирургического робота, содержащую:
стационарное устройство отображения, выполненное с возможностью получения и отображения визуальной информации о хирургическом окружении;
перемещаемое устройство отображения, которое связано со стационарным устройством отображения и является перемещаемым относительно стационарного устройства отображения, при этом перемещаемое устройство отображения выполнено с возможностью получения и отображения визуальной информации, которая отображается стационарным устройством отображения; и
консоль, имеющую опору, на которой смонтировано стационарное устройство отображения.
Кроме того, стационарное устройство отображения соединено с возможностью перемещения с опорой консоли таким образом, что стационарное устройство отображения является перемещаемым относительно опоры консоли.
Кроме того, система визуализации дополнительно содержит направляющую, закрепленную на опоре консоли, и конструкцию поворотной плиты, выполненную с возможностью перемещения поворотно и/или поступательно вдоль направляющей, при этом стационарное устройство отображения соединено с опорой консоли при посредстве конструкции поворотной плиты и направляющей.
Кроме того, стационарное устройство отображения содержит первый элемент отображения, второй элемент отображения, первую группу рефлекторов, вторую группу рефлекторов и устройство наблюдения изображения, содержащее первое окно просмотра и второе окно просмотра, при этом первый элемент отображения и второй элемент отображения выполнены с возможностью соответствующего приема сигналов изображения, задающих в соответствующих изображениях бинокулярную диспаратность между ними, и отображения изображений, причем первая группа рефлекторов выполнена с возможностью отражения изображения, отображаемого на первом элементе отображения, в первое окно просмотра устройства наблюдения изображения, вторая группа рефлекторов выполнена с возможностью отражения изображения, отображаемого на втором элементе отображения, во второе окно просмотра устройства наблюдения изображения, и каждое из первого окна просмотра и второго окна просмотра выполнено с возможностью приема изображения, отображаемого на одном из элементов отображения.
Кроме того, перемещаемое устройство отображения подвижно соединено с устройством наблюдения изображения стационарного устройства отображения или с обеих сторон стационарного устройства отображения.
Кроме того, перемещаемое устройство отображения содержит третий элемент отображения и четвертый элемент отображения, при этом каждый из третьего элемента отображения и четвертого элемента отображения соединен с возможностью связи с источником сигнала для соответствующего одного из элементов отображения стационарного устройства отображения, чтобы иметь возможность получать такой же сигнал изображения, как сигнал изображения, принимаемый соответствующим элементом отображения.
Кроме того, перемещаемое устройство отображения содержит третий элемент отображения, четвертый элемент отображения, первый светоприемный элемент, второй светоприемный элемент, первое оптическое волокно, второе оптическое волокно, первый видеосенсорный элемент, второй видеосенсорный элемент, первый элемент обработки изображений и второй элемент обработки изображений;
при этом первый зеркально-линзовый объектив установлен на первом окне просмотра устройства наблюдения изображения в стационарном устройстве отображения и выполнен с возможностью пропускания части света изображения, отображаемого на первом элементе отображения, который был отражен первой группой рефлекторов, через первый зеркально-линзовый объектив на первое окно просмотра и отражения остального света на первый светоприемный элемент, и отраженная часть света затем передается по первому оптическому волокну на первый видеосенсорный элемент и фотоэлектрически преобразуется первым видеосенсорным элементом в электрический сигнал, который принимается первым элементом обработки изображений, подвергается в нем обработке для повышения качества изображения, и третий элемент отображения выполнен с возможностью отображения изображения, полученного в результате обработки для повышения качества изображения в первом элементе обработки изображений; и
причем второй зеркально-линзовый объектив установлен на втором окне просмотра устройства наблюдения изображения в стационарном устройстве отображения и выполнен с возможностью пропускания части света изображения, отображаемого на втором элементе отображения, который был отражен второй группой рефлекторов, через второй зеркально-линзовый объектив на второе окно просмотра и отражения остального света на второй светоприемный элемент, и отраженная часть света затем передается по второму оптическому волокну на второй видеосенсорный элемент и фотоэлектрически преобразуется им в электрический сигнал, который принимается вторым элементом обработки изображений, подвергается в нем обработке для повышения качества изображения, и четвертый элемент отображения выполнен с возможностью отображения изображения, полученного в результате обработки для повышения качества изображения во втором элементе обработки изображений.
Настоящее изобретение предлагает также хирургического робота, содержащего вышеупомянутую систему визуализации.
Кроме того, хирургический робот дополнительно содержит контроллер, выполненный с возможностью определения, которое из перемещаемого устройства отображения и стационарного устройства отображения выбрано в качестве основного устройства отображения, в зависимости от выбора оперирующего хирурга.
Кроме того, хирургический робот дополнительно содержит устройство получения изображения, хирургический инструмент и ведущий манипулятор на консоли,
при этом устройство получения изображения содержит эндоскоп, выполненный с возможностью получения визуальной информации о хирургическом окружении, стационарное устройство отображения соединено с возможностью связи с эндоскопом, чтобы получать визуальную информацию о хирургическом окружении,
причем ведущий манипулятор выполнен с возможностью управления корректировкой положения и ориентации хирургического инструмента,
причем, соответственно, для стационарного устройства отображения, перемещаемого устройства отображения и эндоскопа заданы системы координат, и
причем контроллер дополнительно выполнен с возможностью согласования направления перемещения и/или схемы изменения ориентации ведущего манипулятора в системе координат основного устройства отображения с направлением перемещения и/или схемой изменения ориентации хирургического инструмента в системе координат эндоскопа.
Кроме того, системы координат заданы, соответственно, для захвата ведущего манипулятора и для опоры консоли; и
контроллер дополнительно выполнен с возможностью корректировки ориентации системы координат захвата в системе координат опоры консоли на основании изменения ориентации системы координат основного устройства отображения в системе координат опоры консоли и выполнения корректировки ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат основного устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа.
Кроме того, перемещаемое устройство отображения содержит гироскоп, выполненный с возможностью распознавания ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли, и контроллер соединен с возможностью связи с гироскопом, чтобы определять изменение ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли, или
при этом перемещаемое устройство отображения содержит датчик магнитного поля и датчик горизонта, которые выполнены с возможностью распознавания ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли, и контроллер соединен с возможностью связи как с датчиком магнитного поля, так и с датчиком горизонта, чтобы определять изменение ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли на основании принципа электромагнитной индукции.
Кроме того, стационарное устройство отображения установлено с возможностью перемещения на консоли при посредстве конструкции поворотной плиты таким образом, чтобы допускать перемещение относительно консоли, и при этом конструкция поворотной плиты содержит установленный на ней датчик положения, выполненный с возможностью измерения угла поворота стационарного устройства отображения, и датчик положения соединен с возможностью связи с контроллером таким образом, что контроллер может определять изменение ориентации системы координат стационарного устройства отображения в системе координат опоры консоли с использованием, как датчика положения, так и кинематической модели.
Кроме того, системы координат заданы, соответственно, для захвата ведущего манипулятора и для консоли; и
когда основное устройство отображения переключают с перемещаемого устройства отображения на стационарное устройство отображения, контроллер определяет матрицу поворота от перемещаемого до стационарного устройства по ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли и ориентации системы координат стационарного устройства отображения в системе координат опоры консоли, корректирует ориентацию системы координат захвата в системе координат опоры консоли на основании матрицы поворота от перемещаемого до стационарного устройства и выполняет корректировку ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат стационарного устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа.
Кроме того, системы координат заданы, соответственно, для захвата ведущего манипулятора и для консоли; и
когда основное устройство отображения переключают со стационарного устройства отображения на перемещаемое устройство отображения, контроллер определяет матрицу поворота от стационарного до перемещаемого устройства по ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли и ориентации системы координат стационарного устройства отображения в системе координат опоры консоли, корректирует ориентацию системы координат захвата в системе координат опоры консоли на основании матрицы поворота от стационарного до перемещаемого устройства и выполняет корректировку ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат перемещаемого устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа.
Кроме того, устройство получения изображения дополнительно содержит: исполнительный элемент, выполненный с возможностью корректировки ориентации эндоскопа, и элемент распознавания ориентации, выполненный с возможностью распознавания ориентации эндоскопа, и при этом
контроллер соединен с возможностью связи как с исполнительным элементом, так и с элементом распознавания ориентации и выполнен с возможностью управления исполнительным элементом на основании ориентации перемещаемого устройства отображения и текущей ориентации эндоскопа, чтобы приводить эндоскоп в движение для достижения согласования между ориентациями эндоскопа и перемещаемого устройства отображения.
Кроме того, устройство получения изображения дополнительно содержит опорный манипулятор эндоскопа, на котором закреплен эндоскоп,
при этом опорный манипулятор эндоскопа содержит сочленения, элемент распознавания ориентации соединен с сочленениями, чтобы измерять углы поворота сочленений, и исполнительный элемент соединен с сочленениями, чтобы приводить сочленения в движение, и причем
контроллер выполнен с возможностью определения текущей ориентации эндоскопа по результатам измерений элемента распознавания ориентации, с использованием кинематической модели, определения величин поворота для соответствующих сочленений опорного манипулятора эндоскопа по ориентации перемещаемого устройства отображения и управления исполнительным элементом, чтобы приводить сочленения в поворотное движения с целью достижения, в результате, согласования между ориентациями эндоскопа и перемещаемого устройства отображения.
Кроме того, устройство получения изображения дополнительно содержит переключатель сопровождения, соединенный с возможностью связи с контроллером, при этом переключатель сопровождения выполнен с возможностью включения или выключения функции контроллера по управлению изменением положения или ориентации эндоскопа в зависимости от перемещаемого устройства отображения.
Кроме того, система координат задана для захвата ведущего манипулятора; и
контроллер дополнительно выполнен с возможностью корректировки ориентации системы координат захвата и ориентации эндоскопа на основании изменения ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли и корректировки ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в скорректированной системе координат эндоскопа таким образом, чтобы достигать согласования между представлением ориентации ведущего манипулятора в системе координат перемещаемого устройства отображения и представлением ориентации хирургического инструмента в скорректированной системе координат эндоскопа.
По сравнению с предшествующим уровнем техники, настоящее изобретение предлагает систему визуализации, которая объединяет перемещаемое устройство отображения со стационарным устройством отображения, обеспечивая больше возможностей работы для оперирующего хирурга. Перемещаемое устройство отображения может регулироваться в соответствии с требованиями удобства и индивидуальными предпочтениями, чтобы создать для оперирующего хирурга ощущение большего удобства работы и ослабить утомление оперирующего хирурга.
Кроме того, в систему может быть включено множество перемещаемых устройств отображения, и визуальная информация может синхронизироваться между отдельными перемещаемыми устройствами отображения и между каждым перемещаемым устройством отображения и стационарным устройством отображения. Это позволяет оперирующему хирургу и ассистирующему персоналу наблюдать за ходом хирургической операции по одинаковому изображению, что повышает степень безопасности операции. При применении в хирургических прикладных системах для подготовки и обучения, допускается участие оперирующего хирурга и нескольких обучаемых практикантов, что обеспечивает более реалистичное обучение и повышенную эффективность обучения.
Настоящее изобретение предлагает также хирургического робота, который включает в себя систему визуализации и предпочтительно согласует направление перемещения и/или схему изменения ориентации ведущего манипулятора в системе координат основного устройства отображения с направлением перемещения и/или схемой изменения ориентации хирургического инструмента в системе координат эндоскопа. Хирургический робот обеспечивает для оперирующего хирурга эффект погружения с тем, чтобы достигать точного распознавания движения и управления им и более высокой точности управления при выполнении операций на основе визуальной информации.
Кроме того, хирургический робот позволяет изменять ориентацию эндоскопа, лапароскопа или подобного инструмента в устройстве получения изображения в зависимости от изменения ориентации перемещаемого устройства отображения. При этом, эндоскоп, лапароскоп или инструмент перемещается в точности как требуется оперирующему хирургу, позволяя проводить хирургическую операцию с большей плавностью и эффективностью.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
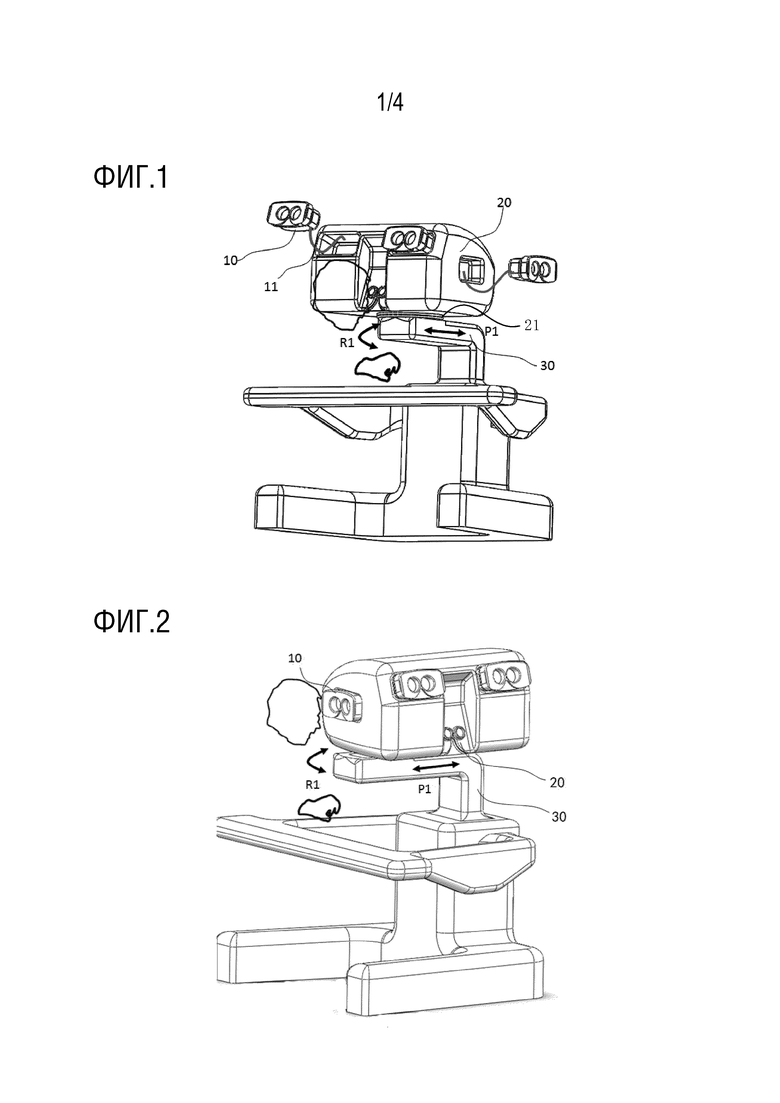
Фиг. 1 - схематическое изображение, представляющее в общих чертах конструкцию системы визуализации для хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 2 - схематическое изображение, представляющее конструкцию системы визуализации для хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
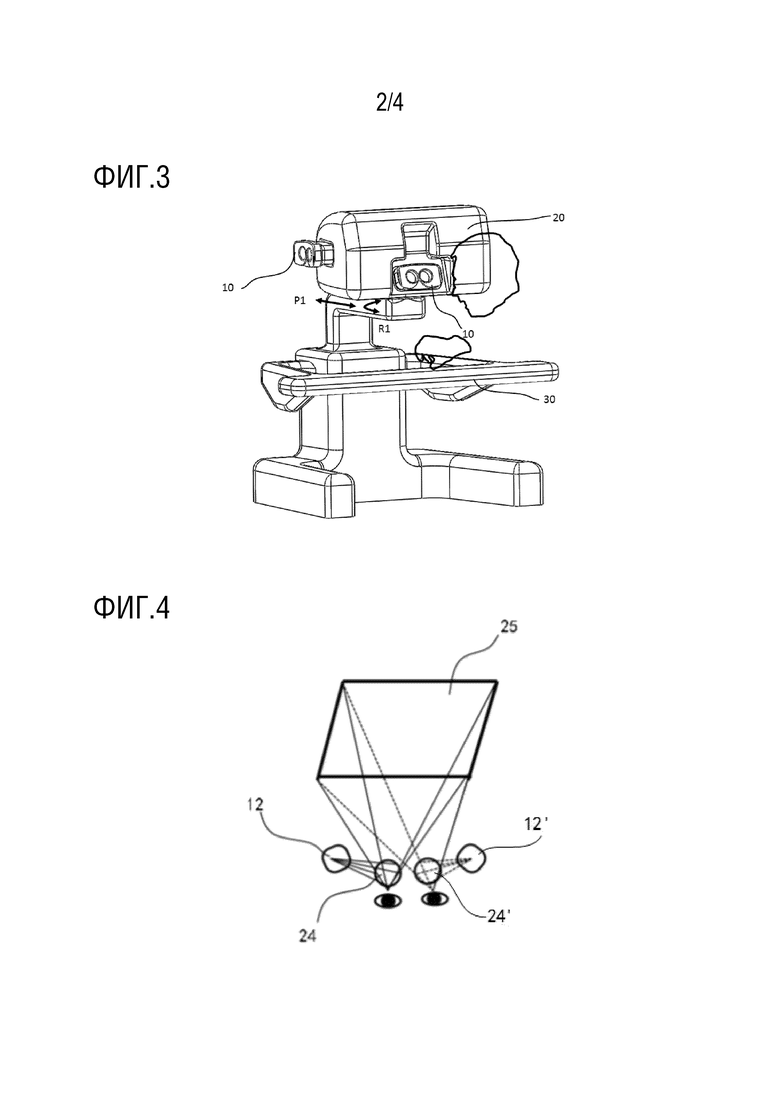
Фиг. 3 - схематическое изображение, представляющее конструкцию системы визуализации для хирургического робота в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 4 - схематическое изображение, представляющее метод визуализации, используемый перемещаемым устройством отображения в системе визуализации для хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
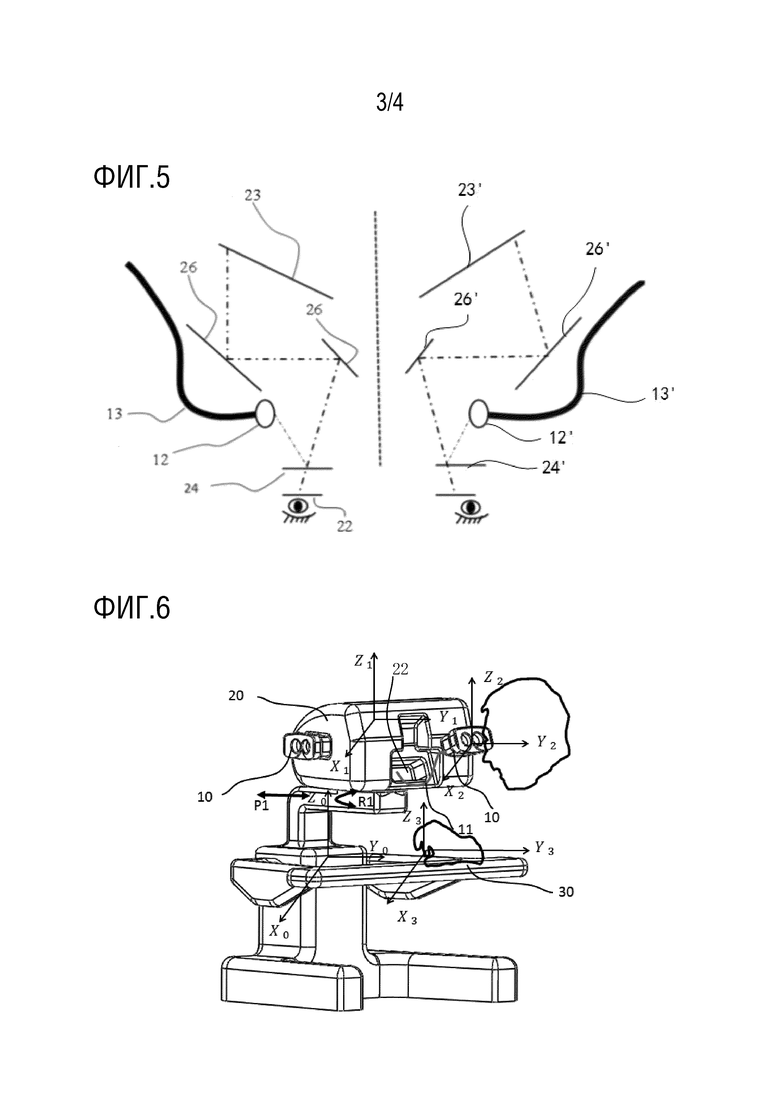
Фиг. 5 - схематическое изображение, поясняющее выполнение метода визуализации, представленного на фиг. 4.
Фиг. 6 - схематическое изображение, поясняющее базовые системы координат отдельных компонентов хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
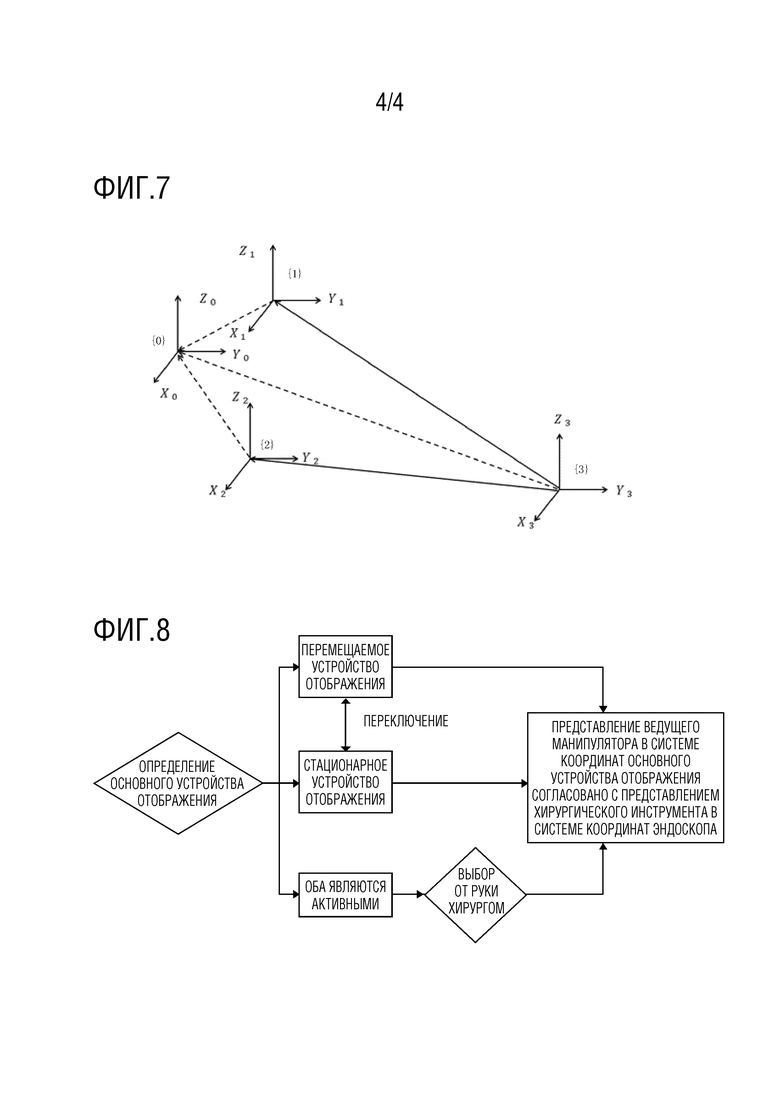
Фиг. 7 - схематическое изображение, поясняющее преобразования между базовыми системами координат компонентов хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 8 - схема логического потока для определения основного устройства отображения в системе визуализации для хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
На данных фигурах, 10 - перемещаемое устройство отображения; 20 - стационарное устройство отображения; 30 - опора консоли; 11 - кабель; 12 - первый светоприемный элемент; 12' - второй светоприемный элемент; 13 - первое оптическое волокно; 13' - второе оптическое волокно; 21 - конструкция поворотной плиты; 22 - устройство наблюдения изображения; 23 - первый элемент отображения; 23' - второй элемент отображения; 24 - первый зеркально-линзовый объектив; 24' - второй зеркально-линзовый объектив; 25 - виртуальное изображение; 26 - первая группа рефлекторов; и 26' - вторая группа рефлекторов.
ПОДРОБНОЕ ОПИСАНИЕ
Системы визуализации для хирургического робота и хирургические роботы, предлагаемые в соответствии с конкретными вариантами осуществления настоящего изобретения, будут подробно описаны ниже со ссылкой на прилагаемые чертежи. Признаки и преимущества настоящего изобретения будут понятнее из последующего описания и из прилагаемой формулы изобретения. Следует отметить, что фигуры представлены в очень упрощенной форме, не обязательно вычерченными в точном масштабе, только с целью содействия пояснению раскрытых примеров более удобным и понятным образом.
Фиг. 1-3 схематически изображают систему визуализации для хирургического робота в соответствии с вариантом осуществления настоящего изобретения. Как показано, система визуализации включает в себя стационарное устройство 20 отображения для получения и отображения визуальной информации о хирургическом окружении. Визуальная информация может отображаться в виде трехмерного (3D) стереоскопического изображения, которое нагляднее представляет хирургическое окружение оперирующему хирургу. Система визуализации включает в себя также перемещаемое устройство 10 отображения, которое подвижно соединено с стационарным устройством 20 отображения таким образом, чтобы допускать относительное перемещение. Например, стационарное устройство 20 отображения может быть оборудовано множеством интерфейсов для присоединения перемещаемого устройства 10 отображения. Как показано на фиг. 1, перемещаемое устройство 10 отображения выполнено с возможностью получения и отображения такой же визуальной информации, которая отображается стационарным устройством 20 отображения. Например, в варианте осуществления настоящего изобретения, перемещаемое устройство 10 отображения может непосредственно получать визуальную информацию из стационарного устройства 20 отображения и отображать ее в виде стереоскопического изображения. Система визуализации включает в себя также консоль, имеющую опору 30, на которой смонтировано стационарное устройство 20 отображения. В соответствии с настоящим изобретением, комбинированное использование перемещаемого и стационарного устройства отображения предоставляет оперирующему хирургу больше возможностей работы. Перемещаемое устройство отображения может быть настроено в соответствии с требованиями удобства и индивидуальными предпочтениями и создает для оперирующего хирурга ощущение большего удобства работы, и ослабляет утомление оперирующего хирурга. В данном случае, информация о «хирургическом окружении» может включать в себя информацию об органе пациента и поле лечебного воздействия, например, такую как распределение кровеносных сосудов и тип и морфология органа, а также информацию о хирургическом инструменте и эндоскопе, например, такую как тип и ориентация хирургического инструмента.
В соответствии с настоящим изобретением, стационарное устройство 20 отображения может включать в себя первый элемент отображения, расположенный слева, и второй элемент отображения, расположенный справа, которые выполнены с возможностью соответствующего приема сигналов изображения из эндоскопа и отображения сигналов изображения. Сигналы изображения, принимаемые первым и вторым элементами отображения, могут задавать бинокулярную диспаратность между соответствующими изображениями. Стационарное устройство 20 отображения может дополнительно включать в себя первую группу рефлекторов, расположенную слева, вторую группу рефлекторов, расположенную справа, и устройство 22 наблюдения изображения, включающее в себя первое окно просмотра и второе окно просмотра. Первое окно просмотра может располагаться слева от второго окна просмотра. Первая группа рефлекторов может быть выполнена с возможностью отражения изображения, отображаемого на первом элементе отображения, в одно окно просмотра устройства 22 наблюдения изображения, и вторая группа рефлекторов может быть выполнена с возможностью отражения изображения, отображаемого на втором элементе отображения, в другое окно просмотра устройства 22 наблюдения изображения. Например, первая группа рефлекторов может быть выполнена с возможностью отражения изображения, отображаемого на первом элементе отображения, в первое окно просмотра, и вторая группа рефлекторов может быть выполнена с возможностью отражения изображения, отображаемого на втором элементе отображения, во второе окно просмотра. Каждое окно просмотра выполнено с возможностью приема изображения только из соответствующего одного из элементов отображения. В контексте настоящего описания, определения «левый» и «правый» предназначены только для описания взаимного расположения элементов отображения, групп рефлекторов и окон просмотра, но не для ограничения настоящего изобретения в каком-либо смысле.
В соответствии с настоящим изобретением может быть обеспечено множество перемещаемых устройств 10 отображения. При такой конструкции, с одной стороны, оперирующий хирург может гибко выбирать для использования любое из перемещаемых устройств 10 отображения, по желанию, например, когда оперирующий хирург переместился из одного положения в другое положение. Это делает работу более удобной. С другой стороны, другое(ие) перемещаемое(ые) устройство(а) отображения могут быть использованы наблюдателем(ями), чтобы наблюдать изображения вместе с оперирующим(ми) хирургом(ами) для хирургической подготовки и обучения. Каждое перемещаемое устройство 10 отображения предпочтительно подвижно соединено с стационарным устройством 20 отображения в устройстве 22 наблюдения изображения или с обеих сторон стационарного устройства 20 отображения.
Чтобы предоставить оперирующему хирургу дополнительное удобство и большее пространство, в котором оперирующий хирург может еще удобнее перемещаться и выполнять операции, в соответствии с вариантами осуществления настоящего изобретения, стационарное устройство 20 отображения может иметь подвижное соединение, чтобы допускать относительное перемещение, с опорой 30 консоли. При применении такой конструкции, стационарное устройство 20 отображения и расположенное(ые) на нем перемещаемое(ые) устройство(а) 10 отображения могут перемещаться в широких пределах.
В варианте осуществления настоящего изобретения, система визуализации может дополнительно включать в себя конструкцию поворотной плиты и направляющую (не показанную). Конструкция поворотной плиты может поворачиваться и поступательно перемещаться относительно направляющей. Кроме того, направляющая может быть закреплена на опоре консоли, и стационарное устройство 20 отображения может иметь соединение с опорой консоли при посредстве конструкции 21 поворотной плиты и направляющей. При применении такой конструкции, конструкция 21 поворотной плиты придает стационарному устройству 20 отображения поворотную степень подвижности R1, чтобы стационарное устройство 20 отображения имело возможность поворачиваться относительно опоры 30 консоли, и направляющая, соединенная с конструкцией 21 поворотной плиты, придает стационарному устройству 20 отображения поступательную степень подвижности P1, чтобы стационарное устройство 20 отображения имело возможность перемещаться вдоль направляющей. Иначе говоря, в данном варианте осуществления, стационарное устройство 20 отображения соединено с опорой 30 консоли с возможностью поворота и поступательного перемещения (с поворотной и поступательной степенями подвижности R1 и P1).
В некоторых вариантах осуществления настоящего изобретения, перемещаемое устройство 10 отображения может отображать визуальную информацию в виде двумерного изображения. В некоторых других вариантах осуществления, перемещаемое устройство 10 отображения может отображать визуальную информацию в виде 3D-изображения. Последняя возможность может обеспечиваться с использованием любого из следующих подходов.
По первому подходу, перемещаемое устройство 10 отображения включает в себя третий элемент отображения, расположенный слева, и четвертый элемент отображения, расположенный справа. Каждый из третьего и четвертного элементов отображения соединен с тем же источником сигнала, что и соответствующий один из элементов отображения стационарного устройства 20 отображения с помощью средства связи, такого как сигнальный кабель 11 или беспроводное соединение, чтобы оба элемента отображения могли получать одинаковую визуальную информацию. В частности, для обеспечения трехмерного визуального воспроизведения, стационарное устройство 20 отображения обычно включает в себя первый элемент отображения, расположенный слева, и второй элемент отображения, расположенный справа, которые выполнены с возможностью соответствующего приема сигналов изображения из эндоскопа, которые задают бинокулярную диспаратность между изображениями. При просмотре изображений, отображаемых на первом и втором элементах отображения, с наблюдением через окна просмотра устройства 22 наблюдения изображения в стационарном устройстве 20 отображения левым и правым глазами, наблюдатель получит такое ощущение, как если бы он смотрел на реальный объект. Такая же визуальная информация представляется также в третий и четвертый элементы отображения перемещаемого устройства 10 отображения по сигнальному кабелю 11 или беспроводному соединению. Например, третий элемент отображения может получать такой же сигнал изображения из того же источника сигнала (например, выходной сигнал КМОП-прибора из эндоскопа), что и первый элемент отображения, и четвертый элемент отображения может получать такой же сигнал изображения из того же источника сигнала (например, выходной сигнал другого КМОП-прибора из эндоскопа), что и второй элемент отображения. При этом, наблюдатель может наблюдать такое же стереоскопическое изображение, отображаемое на двух элементах отображения перемещаемого устройства 10 отображения, на основе принципа бинокулярного визуального отображения. Аналогично, определения «левый» и «правый», в контексте настоящего описания, предназначены только для описания взаимного расположения элементов отображения, но не для ограничения настоящего изобретения каким-либо образом.
По второму подходу, как показано на фиг. 4 и 5, в дополнение к третьему элементу отображения, расположенному слева, и четвертому элементу отображения, расположенному справа, перемещаемое устройство 10 отображения дополнительно включает в себя первый светоприемный элемент 12, расположенный слева, второй светоприемный элемент 12', расположенный справа, первое оптическое волокно 13, расположенное слева, второе оптическое волокно 13', расположенное справа, первый видеосенсорный элемент, расположенный слева, второй видеосенсорный элемент, расположенный справа, первый элемент обработки изображений, расположенный слева, и второй элемент обработки изображений, расположенный справа. Окна просмотра устройства 22 наблюдения изображения снабжены соответствующими зеркально-линзовыми объективами, т.е. первым зеркально-линзовым объективом 24 и вторым зеркально-линзовым объективом 24'. Изображение, отображаемое на первом элементе 23 отображения, отражается первой группой 26 рефлекторов, с формированием первого виртуального изображения. Изображение, отображаемое на втором элементе 23' отображения, отражается второй группой 26' рефлекторов, с формированием второго виртуального изображения, которое может объединяться с первым виртуальным изображением, чтобы формировать составное виртуальное изображение 25. Виртуальное изображение 25 проецируется на соответствующие окна просмотра через зеркально-линзовые объективы 24, 24', а не непосредственно. Кроме того, как показано на фиг. 5, часть отраженного изображения распространяется через первый зеркально-линзовый объектив 24, расположенный слева и достигает первого окна просмотра устройства 22 наблюдения изображения, а остальная часть отраженного света снова отражается первым зеркально-линзовым объективом 24 на первый светоприемный элемент 12 перемещаемого устройства 10 отображения и передается по первому оптическому волокну 13 на первый видеосенсорный элемент (например, КМОП-прибор или прибор с зарядовой связью (ПЗС)) перемещаемого устройства 10 отображения для фотоэлектрического преобразования. Полученный электрический сигнал принимается первым элементом обработки изображений, который затем выполняет обработку принятого сигнала с целью повышения качества изображения, например, подавления шума и увеличения резкости. Аналогично, часть отраженного изображения распространяется через второй зеркально-линзовый объектив 24, расположенный справа и достигает второго окна просмотра устройства 22 наблюдения изображения, а остальная часть отраженного света отражается вторым зеркально-линзовым объективом 24' на второй светоприемный элемент 12' перемещаемого устройства 10 отображения и передается по второму оптическому волокну 13' на второй видеосенсорный элемент (например, КМОП-прибор или ПЗС) перемещаемого устройства 10 отображения для фотоэлектрического преобразования. Полученный электрический сигнал принимается вторым элементом обработки изображений, который затем выполняет обработку принятого сигнала с целью повышения качества изображения, например, подавления шума и увеличения резкости. И наконец, третий и четвертый элементы отображения перемещаемого устройства 10 отображения отображают изображение, полученное из сигналов изображения, которые были подвергнуты обработке для повышения качества изображения, так что оперирующий хирург может наблюдать стереоскопическое изображение с использованием перемещаемого устройства 10 отображения. Данный подход позволяет физически разделить сигналы с использованием раздельных оптических путей и обеспечивает полную согласованность сигналов по формированию изображений.
Настоящее изобретение предлагает также хирургического робота, включающего в себя вышеописанную систему визуализации. Хирургический робот может дополнительно включать в себя ведущий манипулятор на опоре консоли (как показано иконкой руки, изображенной на фиг. 1), хирургический инструмент и устройство получения изображения. Ведущий манипулятор выполнен с возможностью манипуляции оперирующим хирургом для регулировки положения и ориентации хирургического инструмента. Устройство получения изображения может включать в себя эндоскоп для получения визуальной информации о хирургическом окружении. Эндоскоп соединен с возможностью связи со стационарным устройством 20 отображения, чтобы иметь возможность передавать полученную визуальную информацию о хирургическом окружении в стационарное устройство 20 отображения для отображения последним. Для стационарного устройства 20 отображения, перемещаемого устройства 10 отображения и эндоскопа могут быть соответственно заданы системы координат. Хирургический робот может дополнительно включать в себя контроллер, выполненный с возможностью согласования направления перемещения и/или схемы изменения ориентации ведущего манипулятора в системе координат перемещаемого или стационарное устройства отображения с направлением перемещения и/или схемой изменения ориентации хирургического инструмента в системе координат эндоскопа.
В некоторых вариантах осуществления, оперирующий хирург может во время хирургической операции корректировать положение и ориентацию хирургического инструмента посредством манипуляции ведущим манипулятором, одновременно убеждаясь в том, что хирургический инструмент перемещается в точности, как требуется, путем контроля изображения хирургического окружения, визуализируемого устройством отображения на основе визуальной информации, полученной эндоскопом и переданной в систему визуализации. Чтобы обеспечить возможность работы оперирующего хирурга на интуитивном уровне, т.е. работу в соответствии с нормальными ощущениями или реакциями человека, направление перемещения и схема изменения ориентации ведущего манипулятора относительно устройства отображения (включая перемещаемое устройство 10 отображения или стационарное устройство 20 отображения) должны быть согласованы с направлением перемещения и схемой изменения ориентации хирургического инструмента относительно эндоскопа. Например, когда оперирующий хирург будет перемещать ведущий манипулятор внутрь относительно стационарного устройства отображения, т.е. от своих глаз, хирургический инструмент будет перемещаться от эндоскопа. В другом примере, когда оперирующий хирург будет перемещать ведущий манипулятор вправо относительно стационарного устройства отображения, хирургический инструмент также будет перемещаться вправо относительно эндоскопа. С этой целью, системы координат ведущего манипулятора, устройств отображения и эндоскопа должны быть откалиброваны во время инициализации таким образом, чтобы обеспечить согласование направления перемещения и схемы изменения ориентации хирургического инструмента относительно эндоскопа с направлением перемещения и схемой изменения ориентации ведущего манипулятора относительно предполагаемого устройства отображения. Ведущий манипулятор можно отрегулировать в соответствии с изменением ориентации устройства отображения или эндоскопа. Например, при направленной вертикально вниз ориентации головы оперирующего хирурга, на которую надето перемещаемое устройство отображения, перемещение внутрь ведущего манипулятора, при наблюдении отображаемого изображения, будет приводить к перемещению хирургического инструмента от эндоскопа. Однако, когда оперирующий хирург переместит свою голову в горизонтальную ориентацию, такое же перемещение ведущего манипулятора заставит хирургический инструмент переместиться вверх, при наблюдении отображаемого изображения, а не от эндоскопа. Кроме того, переключение между стационарным и перемещаемым устройствами отображения может сопровождаться преобразованием системы координат ведущего манипулятора от предыдущего устройства отображения к текущему устройству отображения.
Чтобы создать для оперирующего хирурга больше удобства при выполнении хирургической операции по отображаемому изображению и обеспечить для него более сильный визуальный эффект погружения, необходимо согласовывать направление перемещения и схему изменения ориентации ведущего манипулятора относительно используемого устройства отображения с направлением перемещения и схемой изменения ориентации хирургического инструмента относительно эндоскопа. С этой целью необходимо предварительно решить, которое из перемещаемого и стационарного устройств 10, 20 отображения планируется использовать как основное устройство отображения. Систему координат ведущего манипулятора приспосабливают для любого изменения ориентации основного устройства отображения, и представление ориентации ведущего манипулятора в системе координат основного устройства отображения согласуют с представлением ориентации хирургического инструмента в системе координат эндоскопа, как подробно описано ниже.
Контроллер может быть дополнительно выполнен с возможностью приема выбора оперирующим хирургом перемещаемого или стационарного устройства отображения в качестве основного устройства отображения. В некоторых вариантах осуществления, перемещаемое устройство 10 отображения может дополнительно включать в себя пускатель, который соединен с возможностью связи с контроллером и может запускаться, когда перемещаемое устройство 10 отображения снимают с соответствующего держателя в системе визуализации. Когда контроллер принимает информацию, указывающую на запуск пускателя, перемещаемое устройство 10 отображения может быть принято, как находящееся в активном включенном состоянии. Стационарное устройство 20 отображения может дополнительно включать в себя переключатель активизации, соединенный с возможностью связи с контроллером. Когда контроллер получает информацию, указывающую, что переключатель активизации активизировался, стационарное устройство 20 отображения может быть принято, как находящееся в активном включенном состоянии. Хирургический робот может дополнительно включать в себя кнопку выбора основного устройства отображения, соединенную с возможностью связи с контроллером, которая может быть предназначена для того, чтобы оперирующий хирург мог выбрать перемещаемое устройство 10 отображения или стационарное устройство 20 отображения в качестве основного устройства отображения. В таблице 1 приведены логические значения, используемые для определения основного устройства отображения, где логический «0» означает «выключено», и «1» означает «включено». Как можно видеть из таблицы, если как перемещаемое, так и стационарное устройства 10, 20 отображения находятся в неактивном выключенном состоянии, то контроллер выбирает стационарное устройство 20 отображения в качестве основного устройства отображения по умолчанию. Если активным является только стационарное устройство 20 отображения, то контроллер также выбирает стационарное устройство 20 отображения в качестве основного устройства отображения. Если активным является только перемещаемое устройство 10 отображения, то контроллер выбирает перемещаемое устройство 10 отображения в качестве основного устройства отображения. Если активными являются как перемещаемое, так и стационарное устройства 10, 20 отображения, то оперирующий хирург может определить и выбрать основное устройство отображения вручную посредством манипуляции кнопкой выбора основного устройства отображения. Контроллер может распознать (получить информацию, указывающую на) выбранное основное устройство отображения по манипуляции оперирующего хирурга от руки с кнопкой выбора основного устройства отображения.
Как показано на фиг. 6 и 7, системы координат перемещаемого устройства 10 отображения, стационарного устройства 20 отображения и опоры 30 консоли могут быть обозначены {1}, {2} и {0}, соответственно. Дополнительная система координат {3} может быть задана для захвата, расположенного на одном конце ведущего манипулятора. Во время инициализации калибруются оконечности перемещаемого устройства 10 отображения, стационарного устройства 20 отображения, опоры 30 консоли и ведущего манипулятора.
В одном варианте осуществления, процесс калибровки можно выполнить так, чтобы системы координат {1} и {3} перемещаемого устройства отображения и захвата поворачивались синхронно друг с другом относительно системы координат {0} опоры консоли, и/или чтобы системы координат {2} и {3} стационарного устройства отображения и захвата поворачивались синхронно друг с другом относительно системы координат {0} опоры консоли. Иначе говоря, ориентация в системе координат {3} захвата может быть преобразована в систему координат {2} стационарного устройства отображения в соответствии с  , и/или ориентация в системе координат {3} захвата может быть преобразована в систему координат {3} перемещаемого устройства отображения в соответствии с
, и/или ориентация в системе координат {3} захвата может быть преобразована в систему координат {3} перемещаемого устройства отображения в соответствии с  .
.
Контроллер может быть дополнительно выполнен с возможностью корректировки ориентации системы координат захвата в системе координат опоры консоли на основании изменения ориентации системы координат основного устройства отображения в системе координат опоры консоли.
Например, в случае выбора перемещаемого устройства 10 отображения в качестве основного устройства отображения, чтобы представлять 3D-стереоизображение оперирующему хирургу во время операции, на перемещаемом устройстве 10 отображения может быть обеспечен гироскоп, чтобы распознавать ориентацию системы координат {1} перемещаемого устройства отображения в системе координат {0} опоры консоли. Контроллер может быть соединен с возможностью связи с гироскопом, чтобы получать ориентацию системы координат {1} перемещаемого устройства отображения в системе координат {0} опоры консоли в реальном времени. В качестве альтернативы, ориентация системы координат {1} перемещаемого устройства отображения в системе координат {0} опоры консоли может распознаваться на основании принципа электромагнитной индукции, с использованием датчика магнитного поля и датчика горизонта, обеспеченных в перемещаемом устройстве 10 отображения, которые помещают в магнитное поле. В данном случае, контроллер может быть аналогично соединен с возможностью связи с датчиком магнитного поля и датчиком горизонта, чтобы получать ориентацию системы координат {1} перемещаемого устройства отображения в системе координат {0} опоры консоли в реальном времени. После поворота перемещаемого устройства отображения из положения A в положение B, контроллер может вывести матрицу  поворота системы координат {1} перемещаемого устройства отображения по ее ориентациям в системе координат {0} опоры консоли в положениях A и B. Контроллер может дополнительно вывести ориентацию системы координат {3} захвата в положении B в системе координат {0} опоры консоли как по ориентации системы координат {3} захвата в положении A в системе координат {0} опоры консоли, так и по матрице
поворота системы координат {1} перемещаемого устройства отображения по ее ориентациям в системе координат {0} опоры консоли в положениях A и B. Контроллер может дополнительно вывести ориентацию системы координат {3} захвата в положении B в системе координат {0} опоры консоли как по ориентации системы координат {3} захвата в положении A в системе координат {0} опоры консоли, так и по матрице  поворота системы координат перемещаемого устройства отображения.
поворота системы координат перемещаемого устройства отображения.
В другом примере, в случае выбора стационарного устройства 20 отображения в качестве основного устройства отображения, чтобы представлять трехмерное стереоскопическое изображение оперирующему хирургу во время операции, если стационарное устройство 20 отображения имеет поворотную степень подвижности R1 относительно опоры 30 консоли, на конструкции 21 поворотной плиты между стационарным устройством 20 отображения и опорой 30 консоли может быть обеспечен датчик положения для измерения угла поворота стационарного устройства 20 отображения. Кроме того, контроллер может быть соединен с возможностью связи с датчиком положения, чтобы получать ориентацию системы координат {2} стационарного устройства 20 отображения в реальном времени. Когда стационарное устройство отображения поворачивается из положения C в положение D, контроллер может вывести матрицу  поворота системы координат стационарного устройства отображения по ее ориентациям в системе координат {0} опоры консоли в положениях C и D. Контроллер может дополнительно вывести ориентацию системы координат {3} захвата в положении D в системе координат {0} опоры консоли как по ориентации системы координат {3} захвата в положении C в системе координат {0} опоры консоли, так и по матрице
поворота системы координат стационарного устройства отображения по ее ориентациям в системе координат {0} опоры консоли в положениях C и D. Контроллер может дополнительно вывести ориентацию системы координат {3} захвата в положении D в системе координат {0} опоры консоли как по ориентации системы координат {3} захвата в положении C в системе координат {0} опоры консоли, так и по матрице  поворота системы координат стационарного устройства отображения.
поворота системы координат стационарного устройства отображения.
Когда основное устройство отображения переключается с перемещаемого устройства 10 отображения на стационарное устройство 20 отображения, контроллер может вывести матрицу поворота R от перемещаемого до стационарного устройства по ориентациям как системы координат {2} перемещаемого устройства отображения, так и системы координат {1} стационарного устройства отображения в системе координат {0} опоры консоли; и выполнить корректировку ориентации системы координат {3} захвата в системе координат {0} опоры консоли на основании матрицы поворота R от перемещаемого до стационарного устройства. Напротив, когда основное устройство отображения переключается со стационарного устройства 20 отображения на перемещаемое устройство 10 отображения, контроллер может вывести матрицу поворота R' от стационарного до перемещаемого устройства по ориентациям как системы координат {2} перемещаемого устройства отображения, так и системы координат {1} стационарного устройства отображения в системе координат {0} опоры консоли и выполнить корректировку ориентации системы координат {3} захвата в системе координат {0} опоры консоли на основании матрицы поворота R' от стационарного до перемещаемого устройства.
Кроме того, копирующее преобразование и синхронизацию можно обеспечить согласованием представления ориентации хирургического инструмента в системе координат эндоскопа с представлением ориентации ведущего манипулятора в системе координат активного устройства отображения. С этой целью, в дополнение к выполнению корректировки ориентации системы координат захвата в системе координат опоры консоли на основании изменения ориентации системы координат основного устройства отображения в системе координат опоры консоли, контроллер может быть дополнительно выполнен с возможностью корректировки ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат основного устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа. Для хирургического инструмента и эндоскопа могут быть дополнительно заданы системы координат {4} и {5}. Во время инициализации, системы координат для перемещаемого устройства 10 отображения, стационарного устройства 20 отображения, ведущего манипулятора, эндоскопа и хирургического инструмента могут быть откалиброваны так, чтобы ориентация в системе координат {3} захвата преобразовалась в систему координат {2} перемещаемого устройства отображения или в систему координат {1} стационарного устройства отображения точно так же, как соответствующая ориентация в системе координат {4} хирургического инструмента преобразуется в систему координат {5} эндоскопа. При этом, хотя ориентация системы координат {3} захвата в системе координат {0} опоры консоли будет всегда изменяться вместе с ориентацией системы координат {2} перемещаемого устройства отображения в системе координат {0} опоры консоли, любое изменение ориентации системы координат {2} перемещаемого устройства отображения будет приводить к рассогласованию между представлением ориентации ведущего манипулятора в новоориентированной системе координат {2} перемещаемого устройства отображения и представлением ориентации хирургического инструмента в системе координат {5} эндоскопа. Поэтому, в дополнение к выполняемой корректировке ориентации системы координат {3} захвата, контроллеру необходимо также использовать кинематическую модель для корректировки разных точек ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат {5} эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат {2} перемещаемого устройства отображения в новой ориентации с представлением ориентации хирургического инструмента в системе координат {5} эндоскопа. В случае, если стационарное устройство 20 отображения имеет поворотную степень подвижности R1 относительно опоры 30 консоли, т.е. в случае возможности корректировки ее ориентации, ведущий манипулятор будет корректироваться аналогично для согласования представления ориентации ведущего манипулятора в системе координат {1} стационарного устройства отображения, которое претерпело какое-либо изменение, с представлением ориентации хирургического инструмента в системе координат {5} эндоскопа.
При применении вышеописанных преобразований и трансформаций, независимо от того, которое из устройств отображения выбрано в качестве основного устройства отображения, системы координат могут точно преобразоваться и трансформироваться между основным устройством отображения и ведущим манипулятором, что приводит к согласованию ориентаций, наблюдаемых в изображении, и системы манипулируемой роботизированной руки с взаимозависимостью координат хирургического инструмента и эндоскопа. Это позволяет точно распознавать движение и управлять им.
Устройство получения изображения может дополнительно включать в себя: исполнительные элементы для корректировки ориентации эндоскопа; и элементы распознавания ориентации для распознавания ориентации эндоскопа. Контроллер может быть соединен с возможностью связи как с исполнительными элементами, так и с элементами распознавания ориентации и выполнен с возможностью управления исполнительными элементами, чтобы выполнять корректировку ориентации на основании ориентации перемещаемого устройства отображения и текущей ориентации эндоскопа и, следовательно, обеспечивать, в результате, согласование между ориентациями эндоскопа и перемещаемого устройства отображения.
Устройство получения изображения может включать в себя опорный манипулятор эндоскопа, на котором закреплен эндоскоп, и который может включать в себя множество сочленений. Элементы распознавания ориентации могут быть выполнены с возможностью измерения углов поворота сочленений, и исполнительные элементы могут быть соединены с сочленениями и выполнены с возможностью приведения сочленений в поворотное движение. Контроллер может определять текущую ориентацию эндоскопа по результатам измерений элемента распознавания ориентации, с использованием кинематической модели, и определять величины поворота для соответствующих сочленений опорного манипулятора эндоскопа по ориентации перемещаемого устройства отображения (соответствующей целевой ориентации для эндоскопа). Затем, контроллер может управлять исполнительными элементами, чтобы приводить сочленения в поворотное движение, которое приводит к согласованию между ориентациями эндоскопа и перемещаемого устройства отображения. Более подробную информацию по этому вопросу можно найти в китайской патентной публикации № CN106333715A, которая в полном объеме включена в настоящую заявку путем отсылки и составляет ее часть.
Оперирующий хирург может изменять ориентацию перемещаемого устройства отображения, чтобы заставлять эндоскоп перемещаться, как требуется, управляемым образом. Это позволяет проводить хирургическую операцию плавно, с повышенной эффективностью. С другой стороны, любое изменение ориентации эндоскопа сопровождается противоположным изменением ориентации хирургического инструмента. Чтобы обеспечить согласование между представлением ориентации ведущего манипулятора в системе координат {2} перемещаемого устройства отображения, которая претерпела изменение ориентации, и представлением ориентации хирургического инструмента в системе координат {5} эндоскопа, которая претерпела ответное изменение ориентации, в дополнение к корректировке ведущего манипулятор для того, чтобы представление ориентации ведущего манипулятора в новоориентированной системе координат {2} перемещаемого устройства отображения согласовалось с представлением ориентации хирургического инструмента в системе координат {5} эндоскопа в предыдущей ориентации, необходимо также дополнительно скорректировать ведущий манипулятор таким образом, чтобы обеспечивалось также согласование между представлением ориентации ведущего манипулятора в новоориентированной системе координат {2} перемещаемого устройства отображения и представлением ориентации хирургического инструмента в системе координат {5} эндоскопа с новой ориентацией. Соответственно, контроллер может быть дополнительно выполнен с возможностью корректировки ориентаций системы координат {3} захвата и эндоскопа на основании изменения ориентации системы координат {2} перемещаемого устройства отображения в системе координат {0} опоры консоли и, таким образом, получения скорректированной системы координат эндоскопа. Кроме того, контроллер может быть выполнен с возможностью корректировки ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в скорректированной системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат {2} перемещаемого устройства отображения с представлением ориентации хирургического инструмента в системе координат {5} эндоскопа.
Кроме того, для предотвращения изменения положения или ориентации эндоскопа в зависимости от перемещаемого устройства отображения нежелательным образом, хирургический робот может дополнительно включать в себя переключатель сопровождения, соединенный с возможностью связи с контроллером, который может быть выполнен с возможностью включения или выключения функции контроллера по управлению изменением положения или ориентации эндоскопа в зависимости от перемещаемого устройства отображения.
Настоящее изобретение не ограничивается никаким конкретным типом контроллера, так как он может быть реализован в форме аппаратного средства, которое выполняет логические операции, такого как однокристальный микрокомпьютер, микропроцессор, программируемый логический контроллер (ПЛК) или вентильная матрица с эксплуатационным программированием (FPGA), или программ системы программного обеспечения, функциональных модулей, функций, библиотек объектных модулей или динамически компонуемых библиотек, которые обеспечивают вышеупомянутые функции на базе аппаратного обеспечения, или сочетания тех и других средств. На основании принципов, раскрытых в настоящей заявке, средний специалист в данной области техники должен получить представление о том, как конкретно реализовать взаимодействие между контроллером и другими компонентами.
Кроме того, настоящее изобретение не ограничивается никаким конкретным типом устройств отображения. Например, возможно применение устройств на базе электроннолучевой трубки (ЭЛТ), плазменного дисплея (ПД), жидкокристаллического дисплея (ЖКД), светодиодов (например, СД, мини-СД, активной матрицы на органических светодиодах или органических светодиодов (ОСД)). Средний специалист в данной области техники может выбрать подходящий тип в соответствии с предполагаемыми условиями применения и требованиями к функциям системы визуализации.
В сущности, настоящее изобретение предлагает систему визуализации для хирургического робота, которая объединяет перемещаемое устройство отображения со стационарным устройством отображения, обеспечивая больше возможностей для работы оперирующего хирурга. Перемещаемое устройство отображения можно регулировать в соответствии с требования удобства и индивидуальными предпочтениями, чтобы создавать для оперирующего хирурга ощущение большего удобства работы и ослаблять утомление оперирующего хирурга.
Кроме того, в систему может быть включено множество перемещаемых устройств отображения, и визуальная информация может синхронизироваться между отдельными перемещаемыми устройствами отображения и между каждым перемещаемым устройством отображения и стационарным устройством отображения. Это позволяет оперирующему хирургу и ассистирующему персоналу наблюдать за ходом хирургической операции по одинаковому изображению, что повышает степень безопасности операции. При применении в хирургических прикладных системах для подготовки и обучения, допускается участие оперирующего хирурга и нескольких обучаемых практикантов, что обеспечивает более реалистичное обучение и повышенную эффективность обучения.
Настоящее изобретение предлагает также хирургического робота, который включает в себя систему визуализации и предпочтительно согласует направление перемещения и/или схему изменения ориентации ведущего манипулятора в системе координат основного устройства отображения с направлением перемещения и/или схемой изменения ориентации хирургического инструмента в системе координат эндоскопа. Хирургический робот обеспечивает для оперирующего хирурга эффект погружения, точное распознавание движения и управление им и более высокую точность управления при выполнении операций на основе визуальной информации.
Кроме того, хирургический робот допускает, чтобы ориентация эндоскопа, лапароскопа или подобного инструмента в устройстве получения изображения изменялась в зависимости от ориентации перемещаемого устройства отображения. При этом, эндоскоп, лапароскоп или инструмент перемещается в точности как требуется оперирующему хирургу, позволяя проводить хирургическую операцию с большей плавностью и эффективностью.
Вышеприведенное описание представляет только несколько предпочтительных вариантов осуществления настоящего изобретения и не предполагает ограничивать его объем в каком-либо смысле. Все изменения и модификации, выполненные средними специалистами в данной области техники на основе вышеизложенных принципов, также находятся в пределах объема, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2018 |
|
RU2741469C1 |
| ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА И ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НЕЕ | 2018 |
|
RU2740114C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА И ЕЕ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2751753C1 |
| ХИРУРГИЧЕСКИЙ РОБОТ ДЛЯ ОРТОПЕДИЧЕСКИХ ВМЕШАТЕЛЬСТВ | 2017 |
|
RU2746742C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
| Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе (варианты) | 2023 |
|
RU2831301C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА С УСОВЕРШЕНСТВОВАННЫМ УПРАВЛЕНИЕМ | 2011 |
|
RU2569699C2 |
| РОБОТИЗИРОВАННОЕ УПРАВЛЕНИЕ ЭНДОСКОПОМ НА ОСНОВЕ АНАТОМИЧЕСКИХ ПРИЗНАКОВ | 2014 |
|
RU2692206C2 |
Изобретение относится к медицинской технике и может быть использовано для отображения визуальной информации о хирургическом окружении. Хирургический робот содержит стационарное устройство отображения, которое выполнено с возможностью получения и отображения визуальной информации о хирургическом окружении. Перемещаемое устройство отображения связано со стационарным устройством отображения и является перемещаемым относительно стационарного устройства отображения. Перемещаемое устройство отображения выполнено с возможностью получения и отображения визуальной информации, которая отображается стационарным устройством отображения. Консоль имеет опору, на которой смонтировано стационарное устройство отображения. Устройство получения изображения, содержит эндоскоп, выполненный с возможностью получения визуальной информации о хирургическом окружении. Стационарное устройство отображения соединено с возможностью связи с эндоскопом, чтобы получать визуальную информацию о хирургическом окружении. Ведущий манипулятор установлен на опоре консоли и выполнен с возможностью управления корректировкой положения и ориентации хирургического инструмента. Контроллер выполнен с возможностью определения, которое из перемещаемого устройства отображения и стационарного устройства отображения выбрано в качестве основного устройства отображения, в зависимости от выбора оперирующего хирурга. Контроллер имеет возможность согласования направления перемещения и/или схемы изменения ориентации ведущего манипулятора в системе координат основного устройства отображения с направлением перемещения и/или схемой изменения ориентации хирургического инструмента в системе координат эндоскопа. Для стационарного устройства отображения, перемещаемого устройства отображения и эндоскопа заданы системы координат. В результате система визуализации для хирургического робота может создать для оперирующего хирурга ощущение большего удобства работы и ослабить его утомление. 15 з.п. ф-лы, 8 ил., 1 табл.
1. Хирургический робот, содержащий:
стационарное устройство отображения, выполненное с возможностью получения и отображения визуальной информации о хирургическом окружении;
перемещаемое устройство отображения, которое связано со стационарным устройством отображения и является перемещаемым относительно стационарного устройства отображения, при этом перемещаемое устройство отображения выполнено с возможностью получения и отображения визуальной информации, которая отображается стационарным устройством отображения;
консоль, имеющую опору, на которой смонтировано стационарное устройство отображения; и
контроллер, выполненный с возможностью определения, которое из перемещаемого устройства отображения и стационарного устройства отображения выбрано в качестве основного устройства отображения, в зависимости от выбора оперирующего хирурга;
устройство получения изображения, содержащее эндоскоп, выполненный с возможностью получения визуальной информации о хирургическом окружении, причем стационарное устройство отображения соединено с возможностью связи с эндоскопом, чтобы получать визуальную информацию о хирургическом окружении; и
ведущий манипулятор на опоре консоли, причем ведущий манипулятор выполнен с возможностью управления корректировкой положения и ориентации хирургического инструмента,
причем, соответственно, для стационарного устройства отображения, перемещаемого устройства отображения и эндоскопа заданы системы координат, и
причем контроллер дополнительно выполнен с возможностью согласования направления перемещения и/или схемы изменения ориентации ведущего манипулятора в системе координат основного устройства отображения с направлением перемещения и/или схемой изменения ориентации хирургического инструмента в системе координат эндоскопа.
2. Хирургический робот по п. 1, в котором стационарное устройство отображения соединено с возможностью перемещения с опорой консоли таким образом, что стационарное устройство отображения является перемещаемым относительно опоры консоли.
3. Хирургический робот по п. 2, дополнительно содержащий направляющую, закрепленную на опоре консоли, и конструкцию поворотной плиты, выполненную с возможностью перемещения поворотно и/или поступательно вдоль направляющей, при этом стационарное устройство отображения соединено с опорой консоли при посредстве конструкции поворотной плиты и направляющей.
4. Хирургический робот по п. 1, в котором стационарное устройство отображения содержит первый элемент отображения, второй элемент отображения, первую группу рефлекторов, вторую группу рефлекторов и устройство наблюдения изображения, содержащее первое окно просмотра и второе окно просмотра, при этом первый элемент отображения и второй элемент отображения выполнены с возможностью соответствующего приема сигналов изображения, задающих в соответствующих изображениях бинокулярную диспаратность между ними, и отображения изображений, причем первая группа рефлекторов выполнена с возможностью отражения изображения, отображаемого на первом элементе отображения, в первое окно просмотра устройства наблюдения изображения, вторая группа рефлекторов выполнена с возможностью отражения изображения, отображаемого на втором элементе отображения, во второе окно просмотра устройства наблюдения изображения, и каждое из первого окна просмотра и второго окна просмотра выполнено с возможностью приема изображения, отображаемого на одном из элементов отображения.
5. Хирургический робот по п. 4, в котором перемещаемое устройство отображения подвижно соединено с устройством наблюдения изображения стационарного устройства отображения или с любой стороны стационарного устройства отображения.
6. Хирургический робот по п. 4, в котором перемещаемое устройство отображения содержит третий элемент отображения и четвертый элемент отображения, при этом каждый из третьего элемента отображения и четвертого элемента отображения соединен с возможностью связи с источником сигнала для соответствующего одного из элементов отображения стационарного устройства отображения, чтобы иметь возможность получать такой же сигнал изображения, как сигнал изображения, принимаемый соответствующим элементом отображения.
7. Хирургический робот по п. 4, в котором:
перемещаемое устройство отображения содержит третий элемент отображения, четвертый элемент отображения, первый светоприемный элемент, второй светоприемный элемент, первое оптическое волокно, второе оптическое волокно, первый видеосенсорный элемент, второй видеосенсорный элемент, первый элемент обработки изображений и второй элемент обработки изображений;
при этом первый зеркально-линзовый объектив установлен на первом окне просмотра устройства наблюдения изображения в стационарном устройстве отображения и выполнен с возможностью пропускания части света изображения, отображаемого на первом элементе отображения, который был отражен первой группой рефлекторов, через первый зеркально-линзовый объектив на первое окно просмотра и отражения остального света на первый светоприемный элемент, и отраженная часть света затем передается по первому оптическому волокну на первый видеосенсорный элемент и фотоэлектрически преобразуется первым видеосенсорным элементом в электрический сигнал, который принимается первым элементом обработки изображений, подвергается в нем обработке для повышения качества изображения, и третий элемент отображения выполнен с возможностью отображения изображения, полученного в результате обработки для повышения качества изображения в первом элементе обработки изображений; и
причем второй зеркально-линзовый объектив установлен на втором окне просмотра устройства наблюдения изображения в стационарном устройстве отображения и выполнен с возможностью пропускания части света изображения, отображаемого на втором элементе отображения, который был отражен второй группой рефлекторов, через второй зеркально-линзовый объектив на второе окно просмотра и отражения остального света на второй светоприемный элемент, и отраженная часть света затем передается по второму оптическому волокну на второй видеосенсорный элемент и фотоэлектрически преобразуется им в электрический сигнал, который принимается вторым элементом обработки изображений, подвергается в нем обработке для повышения качества изображения, и четвертый элемент отображения выполнен с возможностью отображения изображения, полученного в результате обработки для повышения качества изображения во втором элементе обработки изображений.
8. Хирургический робот по п. 1, в котором:
системы координат заданы, соответственно, для захвата ведущего манипулятора и для опоры консоли; и
контроллер дополнительно выполнен с возможностью корректировки ориентации системы координат захвата в системе координат опоры консоли на основании изменения ориентации системы координат основного устройства отображения в системе координат опоры консоли и выполнения корректировки ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат основного устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа.
9. Хирургический робот по п. 8, в котором перемещаемое устройство отображения содержит гироскоп, выполненный с возможностью распознавания ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли, и контроллер соединен с возможностью связи с гироскопом, чтобы определять изменение ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли, или
при этом перемещаемое устройство отображения содержит датчик магнитного поля и датчик горизонта, которые выполнены с возможностью распознавания ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли, и контроллер соединен с возможностью связи как с датчиком магнитного поля, так и с датчиком горизонта, чтобы определять изменение ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли на основании принципа электромагнитной индукции.
10. Хирургический робот по п. 8, в котором стационарное устройство отображения установлено с возможностью перемещения на опоре консоли при посредстве конструкции поворотной плиты таким образом, чтобы допускать перемещение относительно консоли, и при этом конструкция поворотной плиты содержит установленный на ней датчик положения, выполненный с возможностью измерения угла поворота стационарного устройства отображения, и датчик положения соединен с возможностью связи с контроллером таким образом, что контроллер может определять изменение ориентации системы координат стационарного устройства отображения в системе координат опоры консоли с использованием как датчика положения, так и кинематической модели.
11. Хирургический робот по п. 1, в котором:
системы координат заданы, соответственно, для захвата ведущего манипулятора и для опоры консоли; и
когда основное устройство отображения переключают с перемещаемого устройства отображения на стационарное устройство отображения, контроллер определяет матрицу поворота от перемещаемого до стационарного устройства по ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли и ориентации системы координат стационарного устройства отображения в системе координат опоры консоли, корректирует ориентацию системы координат захвата в системе координат опоры консоли на основании матрицы поворота от перемещаемого до стационарного устройства и выполняет корректировку ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат стационарного устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа.
12. Хирургический робот по п. 1, в котором:
системы координат заданы, соответственно, для захвата ведущего манипулятора и для опоры консоли; и
когда основное устройство отображения переключают со стационарного устройства отображения на перемещаемое устройство отображения, контроллер определяет матрицу поворота от стационарного до перемещаемого устройства по ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли и ориентации системы координат стационарного устройства отображения в системе координат опоры консоли, корректирует ориентацию системы координат захвата в системе координат опоры консоли на основании матрицы поворота от стационарного до перемещаемого устройства и выполняет корректировку ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в системе координат эндоскопа, чтобы согласовать представление ориентации ведущего манипулятора в системе координат перемещаемого устройства отображения с представлением ориентации хирургического инструмента в системе координат эндоскопа.
13. Хирургический робот по п. 1, в котором устройство получения изображения дополнительно содержит: исполнительный элемент, выполненный с возможностью корректировки ориентации эндоскопа, и элемент распознавания ориентации, выполненный с возможностью распознавания ориентации эндоскопа, и при этом
контроллер соединен с возможностью связи как с исполнительным элементом, так и с элементом распознавания ориентации и выполнен с возможностью управления исполнительным элементом на основании ориентации перемещаемого устройства отображения и текущей ориентации эндоскопа, чтобы приводить эндоскоп в движение для достижения согласования между ориентациями эндоскопа и перемещаемого устройства отображения.
14. Хирургический робот по п. 13, в котором устройство получения изображения дополнительно содержит опорный манипулятор эндоскопа, на котором закреплен эндоскоп,
при этом опорный манипулятор эндоскопа содержит сочленения, элемент распознавания ориентации соединен с сочленениями, чтобы измерять углы поворота сочленений, и исполнительный элемент соединен с сочленениями, чтобы приводить сочленения в движение, и причем
контроллер выполнен с возможностью определения текущей ориентации эндоскопа по результатам измерений элемента распознавания ориентации, с использованием кинематической модели, определения величин поворота для сочленений опорного манипулятора эндоскопа по ориентации перемещаемого устройства отображения и управления исполнительным элементом, чтобы приводить сочленения в поворотное движения с целью достижения, в результате, согласования между ориентациями эндоскопа и перемещаемого устройства отображения.
15. Хирургический робот по п. 14, в котором устройство получения изображения дополнительно содержит переключатель сопровождения, соединенный с возможностью связи с контроллером, при этом переключатель сопровождения выполнен с возможностью включения или выключения функции контроллера по управлению изменением положения или ориентации эндоскопа в зависимости от перемещаемого устройства отображения.
16. Хирургический робот по п. 13, в котором
система координат задана для захвата ведущего манипулятора; и
контроллер дополнительно выполнен с возможностью корректировки ориентации системы координат захвата и ориентации эндоскопа на основании изменения ориентации системы координат перемещаемого устройства отображения в системе координат опоры консоли и корректировки ориентации ведущего манипулятора на основании представления ориентации хирургического инструмента в скорректированной системе координат эндоскопа таким образом, чтобы достигать согласования между представлением ориентации ведущего манипулятора в системе координат перемещаемого устройства отображения и представлением ориентации хирургического инструмента в скорректированной системе координат эндоскопа.
| CN 108701429 A, 23.10.2018 | |||
| US 2016220324 A1, 04.08.2016 | |||
| US 2018092706 A1, 05.04.2018 | |||
| СПОСОБ ПРОВЕДЕНИЯ МАЛОИНВАЗИВНОГО ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА И УСТАНОВКА "РХ-1" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594100C1 |
| US 9645785 B1, 09.05.2017 | |||
| CN 107028662 A, 11.08.2017. | |||

