Область техники, к которой относится изобретение
Изобретение относится к гибочным устройствам, в частности, для обработки тонких деталей, например, к гибочным устройствам для образования гофра в металлическом листе с использованием конструкции уплотнительной мембраны резервуара для хранения текучей среды.
Такие металлические листы могут, в частности, использоваться в области герметичных и теплоизолированных мембранных резервуаров для хранения и/или транспортировки текучих сред, таких как криогенные текучие среды.
Уровень техники
Документ WO 2015170054 раскрывает гибочную машину для образования гофра в металлическом листе с предварительно образованным гофром, перпендикулярного упомянутому предварительно образованному гофру. Гибочная машина имеет нижнюю матрицу, содержащую первый и второй элементы матрицы, каждый из которых имеет принимающую поверхность металлического листа и вогнутую рабочую формообразующую полуполость, причем первый и второй элементы матрицы установлены с возможностью скольжения на нижней раме в направлении «х», перпендикулярном образуемому гофру с возможностью скольжения между открытым положением и закрытым положением. В вышеупомянутом закрытом положении рабочие формообразующие полуполости первого элемента матрицы и второго элемента матрицы вместе определяют рабочую формообразующую полуполость, соответствующую форме образуемого гофра. Гибочная машина также включает в себя верхний пуансон, который подвижен относительно нижней рамы и имеет форму, совпадающую с формой рабочей формообразующей полости. Кроме того, первый и второй боковые зажимы, расположенные на обеих сторонах верхнего пуансона, соответственно, напротив первого и второго элементов матрицы, установлены с возможностью скольжения в направлении «x» между открытым положением и закрытым положением.
При работе, когда металлический лист зажат между боковыми зажимами и элементами матрицы, перемещение верхнего пуансона из нерабочего положения в положение гибки приводит к сгибанию металлического листа, во время которого металлический лист передает тяговое усилие в направлении «х» к элементам матрицы и к боковым зажимам, тем самым перемещая их в закрытое положение.
В варианте выполнения, показанном на фиг.16 документа WO 2015170054, гибочная машина содержит вспомогательные устройства для перемещения элементов матрицы и боковых зажимов в закрытое положение. Такие вспомогательные устройства особенно предпочтительны, поскольку они, в частности, гарантируют, что элементы матрицы и боковые зажимы перемещаются на всю длину хода, то есть до самого близкого конечного положения, во время перемещения пуансона в его положение гибки. Вспомогательные устройства имеют кулачковые ведомые звенья, которые установлены на каждом элементе матрицы и выполнены с возможностью взаимодействия с кулачковыми поверхностями, удерживаемыми верхней рамой, когда упомянутая рама перемещается вниз из нерабочего положения в положение гибки. Кулачковые поверхности также ориентированы таким образом, что, когда верхний пуансон перемещается из нерабочего положения в положение гибки, кулачковая поверхность давит на кулачковое ведомое звено, стремясь переместить элементы матрицы к закрытому положению. Такие вспомогательные устройства, однако, не являются полностью удовлетворительными.
Действительно, было отмечено, что в положении конца хода верхнего пуансона устройств известного уровня техники кулачковые ведомые звенья, которыми являются роликами, подвергаются очень высокому напряжению из-за силы, действующей на кулачковую поверхность на почти тангенциальном сечении ролика. Эти силы, действующие на ролик, уменьшают срок его службы, в частности, вызывая образование в нем трещин.
Кроме того, гибочные машины известного уровня техники, несмотря на наличие в них вспомогательных устройств для содействия перемещению нижней матрицы, могут растягивать металлический лист во время образования гофра, в частности, в положении конца хода верхнего пуансона, когда действуют самые большие силы. Это растяжение уменьшает толщину листа в сгибе и приводит к риску повреждения листа. Поэтому желательно избегать всего растяжения или разрушения листа при фальцовке.
Сущность изобретения
Задача некоторых вариантов выполнения изобретения заключается в обеспечении усовершенствованного вспомогательного устройства, обеспечивающего контроль степени растяжения материала при образовании гофра, например, путем гибки и/или штамповки.
Задачей некоторых вариантов выполнения изобретения заключается в обеспечении гибочного устройства, позволяющего изгибать, по существу, не растягивая металлический лист.
Другая задача некоторых вариантов выполнения изобретения заключается в обеспечении гибочного устройства, которое ограничивает силы, прикладываемые к вспомогательным устройствам.
В соответствии с одним вариантом выполнения изобретение предоставляет формообразующее устройство для обработки тонкой детали, например, путем гибки и/или штамповки, причем формообразующее устройство содержит:
- первый рабочий элемент, который может перемещаться в направлении «х», например, по существу, перпендикулярно направлению толщины обрабатываемой тонкой детали,
- второй рабочий элемент, который может перемещаться в направлении «z», перпендикулярном направлению «x», например, по существу, параллельном направлению толщины обрабатываемой тонкой детали, и
- вспомогательное устройство, выполненное с возможностью содействия перемещению первого рабочего элемента в направлении «x» согласованно с перемещением второго рабочего элемента в направлении «z», причем вспомогательное устройство выполнено с возможностью перемещения первого рабочего элемента с соотношением скоростей, меняющимся во время движения, соотношение скоростей представляет собой соотношение между линейной скоростью первого рабочего элемента в направлении «x» и линейной скоростью второго рабочего элемента в направлении «z».
Эти признаки позволяют формообразующему устройству управлять, увеличивать, уменьшать или предотвращать растяжение тонкой детали, увеличивая или уменьшая скорость первого рабочего элемента по отношению к скорости второго рабочего элемента.
Формообразующее устройство может представлять собой гибочное устройство и/или штамповочное устройство для тонких деталей, то есть толщина которых мала по сравнению с другими размерами детали.
В соответствии с одним вариантом осуществления формообразующее устройство представляет собой устройство, используемое для образования гофра в металлическом листе, которое, например, предназначено для изготовления уплотнительной мембраны резервуара для хранения текучей среды, причем гибочное устройство содержит:
- верхнюю раму;
- нижнюю раму;
- нижнюю матрицу, содержащую первый и второй элементы матрицы, каждый из которых имеет принимающую поверхность металлического листа и вогнутую половину рабочей формообразующей полости, причем каждый из первого и второго элементов матрицы установлены с возможностью скольжения на нижней раме в направлении «х» между открытым положением и закрытым положением, причем половины рабочих формообразующих полостей первого и второго элементов матрицы вместе определяют рабочую формообразующую полость, соответствующую форме образуемого гофра, когда первый и второй элементы матрицы находятся в закрытом положении;
- верхний пуансон, расположенный над нижней матрицей и жестко соединенный с верхней рамой, имеющий нижний конец, снабженный головкой, имеющей форму, по существу, соответствующую форме рабочей формообразующей полости, причем упомянутый верхний пуансон имеет возможность перемещаться в направлении «z», перпендикулярном направлению «х» относительно нижней рамы между нерабочим положением и положением гибки, в котором головка упомянутого верхнего пуансона вступает в рабочий контакт внутри рабочей формообразующей полости нижней матрицы для надавливания на металлический лист;
- первый и второй боковые зажимы, расположенные на каждой стороне верхнего пуансона над нижней матрицей, соответственно, напротив первого и второго элементов матрицы, причем упомянутые первый и второй боковые зажимы установлены с возможностью скольжения в направлении «x» между закрытым положением и открытым положением, причем первый и второй боковые зажимы имеют возможность перемещаться вертикально по отношению к нижней раме между освобожденным положением и зажатым положением, в котором первый и второй боковые зажимы соответственно перемещаются в направлении принимающей поверхности элемента матрицы и второго элемента матрицы так, чтобы закрепить металлический лист на принимающей поверхности первого и второго элементов матрицы;
в котором первый рабочий элемент представляет собой по меньшей мере один или оба элемента матрицы, а второй рабочий элемент является верхним пуансоном.
Эти признаки позволяют гибочному устройству контролировать, увеличивать, уменьшать или предотвращать растяжение металлического листа, в частности, в положении начала или конца хода пуансона, путем увеличения или уменьшения скорости приближения одного или нескольких элементов матрицы по отношению к скорости опускания пуансона.
Согласно одному варианту выполнения соотношение скорости увеличивается между нерабочим положением и положением гибки.
Действительно, цифровое моделирование показало, что для того, чтобы существенно устранить растяжение металлического листа во время гибки, соотношение скорости движения матрицы к скорости пуансона должно быть возрастающей функцией, которая может быть приближенно определена синусом угла, образованного металлическим листом, введенным в рабочую формообразующую полость в направлении «х». Поскольку угол увеличивается от 0 до 90 градусов во время движения при гибке, функция синуса является возрастающей функцией. Поэтому предпочтительно, чтобы скорость нижней матрицы увеличивалась по сравнению со скоростью пуансона, когда угол металлического листа увеличивается.
Соотношение скоростей может быть изменено в соответствии с различными правилами изменения. Согласно одному варианту выполнения, соотношение скоростей принимает значения n последовательно между нерабочим положением и положением гибки, причем n является целым числом, равным или больше 2.
Согласно одному варианту осуществления вспомогательное устройство выполнено с возможностью перемещения первого рабочего элемента, например по меньшей мере одного первого и второго элементов матрицы, в соответствии с первым значением соотношения скоростей между нерабочим положением и промежуточным положением, и в соответствии со вторым значением соотношения скоростей между промежуточным положением и положением гибки.
Согласно одному варианту осуществления второе значение соотношения скоростей больше первого значения соотношения скоростей.
В соответствии с одним вариантом осуществления формообразующее устройство содержит множество вспомогательных устройств.
В соответствии с одним вариантом осуществления вспомогательное устройство выполнено с возможностью перемещения первого и второго элементов матрицы в закрытое положение согласованно с перемещением пуансона в направлении положения гибки и выполнено с возможностью перемещения первого и второго элементов матрицы согласно соотношению скоростей, изменяющемуся от нерабочего положения до положения гибки.
Таким образом, первый и второй элементы матрицы перемещаются синхронно друг к другу, образуя симметричную волну.
В соответствии с одним вариантом осуществления соотношение скоростей между линейной скоростью первого рабочего элемента, например, элемента матрицы, в направлении «x», и линейной скоростью второго рабочего элемента, например верхнего пуансона, в направлении «z» представляет собой в общем полную дугу синусоидальной функции.
В соответствии с одним вариантом осуществления вспомогательное устройство имеет первый рычаг и/или второй рычаг, которые установлены с возможностью поворота на нижней раме вокруг оси вращения, ориентированной в направлении «y», ортогональном направлениям «x» и «z», или рычаг, имеющий первый конец, выполненный с возможностью перемещения опорной поверхностью, жестко соединенной с верхней рамой при перемещении второго рабочего элемента, например, верхнего пуансона из нерабочего положения в положение гибки, причем перемещение первого конца рычага приводит к перемещению второго конца рычага при вращении вокруг оси вращения, причем второй конец снабжен кулачковым ведомым звеном, а кулачковое ведомое звено выполнен с возможностью взаимодействия с кулачковым профилем, удерживаемым первым рабочим элементом, например, первый или второй элемент матрицы, кулачковое ведомое звено и кулачковый профиль выполнены таким образом, что во время вращения, вызванного перемещением второго рабочего элемента, например верхнего пуансона, из нерабочего положения в положение гибки, кулачковое ведомое звено оказывает воздействие на кулачковый профиль, стремясь переместить первый рабочий элемент, например, первый или второй элемент матрицы, в направлении «х» к закрытому положению.
Таким образом, рычаги вспомогательных устройств позволяют преобразовать поступательное движение в направлении «z» во вращательное движение, а это вращательное движение в поступательное движение в направлении «x». Действительно, на рычаги воздействует сила в направлении «z», стремящаяся заставить упомянутые рычаги поворачиваться вокруг направления «y», чтобы передавать усилие в направлении «x» на кулачковый профиль, позволяющий первому рабочему элементу, например, элементам матрицы, двигаться в направлении «х». Следовательно, рычаги обеспечивают возможность преобразования поступательного движения второго рабочего элемента, например верхнего пуансона, в направлении «z» в поступательное движение первого рабочего элемента, например, элементов матрицы, в направлении «x».
В соответствии с одним вариантом осуществления первый рычаг и второй рычаг вспомогательного устройства совместно используют одну и ту же ось вращения.
В соответствии с одним вариантом осуществления, ось вращения первого рычага смещена от оси вращения второго рычага в направлении «х».
В соответствии с одним вариантом осуществления один или несколько рычагов имеют форму колена.
В соответствии с одним вариантом осуществления, каждый рычаг имеет усиление между первым концом и промежуточным участком.
В соответствии с одним вариантом осуществления первый конец каждого или одного из первого и второго рычагов имеет первый направляющий ролик, на который опирается опорная поверхность, жестко соединенная с опорами верхней рамы.
В соответствии с одним вариантом осуществления кулачковое ведомое звено имеет второй направляющий ролик.
Кулачковый профиль может иметь разные формы.
В соответствии с одним вариантом осуществления кулачковый профиль представляет собой плоскую поверхность, перпендикулярную направлению «x». Кулачковый профиль также может быть плоскостью, наклоненной под ненулевым углом относительно плоскости «yz».
В соответствии с одним вариантом осуществления устройство включает в себя первый возвратный элемент, выполненный с возможностью возврата упомянутых первого и второго элементов матрицы в открытое положение.
В соответствии с одним вариантом осуществления устройство включает в себя второй возвратный элемент, выполненный с возможностью возврата упомянутых первого и второго боковых зажимов в открытое положение.
В соответствии с одним вариантом осуществления, опорная поверхность жестко соединенная с верхней рамой, является первой опорной поверхностью, устройство имеет вторую опорную поверхность, жестко соединенную с верхней рамой, вторая опорная поверхность смещена в направлении «z» от первой опорной поверхности, и рычаг имеет промежуточный участок, расположенную между первым концом и вторым концом, причем промежуточный участок имеет по меньшей мере одно промежуточное посадочное место и по меньшей мере один третий направляющий ролик, установленный по меньшей мере на одном промежуточном седле, и в котором вторая опорная поверхность выполнена с возможностью опираться на по меньшей мере один третий направляющий ролик на промежуточном участке.
Таким образом, рычаг имеет один или несколько третьих направляющих роликов в зависимости от количества требуемых различных значений соотношения скоростей. Например, если требуются три значения соотношения скоростей, на рычаге располагаются два третьих роликов.
В соответствии с одним вариантом осуществления вспомогательное устройство включает в себя направляющий ролик в каждом промежуточном седле.
В соответствии с одним вариантом осуществления по меньшей мере одно промежуточное посадочное место расположено между осью вращения и первым концом.
Таким образом, когда первый ролик или третий ролик подвергаются воздействию силы в направлении «z», стремящейся перемещать упомянутый ролик в этом направлении, кулачковое ведомое звено затем вращается вокруг оси вращения и тем самым оказывает воздействие на профиль кулачка в направлении «х». Скорость вращения рычага увеличивается по мере того, как ролик, на который действует сила в направлении «z», приближается к оси вращения, что увеличивает линейную скорость первого рабочего элемента в направлении «x».
В соответствии с одним вариантом осуществления расстояние между осью вращения рычага и первым роликом такое же, как расстояние между осью вращения рычага и вторым роликом. Расстояние также может быть разным.
В соответствии с одним вариантом осуществления расстояние между осью вращения рычага и третьим роликом строго меньше, чем расстояние между осью вращения рычага и первым роликом.
В соответствии с одним вариантом осуществления первое значение соотношения скоростей получается посредством первой опорной поверхности, опирающейся на первый ролик первого конца.
В соответствии с одним вариантом осуществления второе значение соотношения скоростей получается посредством второй опорной поверхности, опирающейся на третий ролик промежуточного участка.
В соответствии с одним вариантом осуществления промежуточное положение второго рабочего элемента, например верхнего пуансона, определяется тем фактом, что первая опорная поверхность находится в контакте с первым роликом, а вторая опорная поверхность находится в контакте с третьим роликом.
В соответствии с одним вариантом осуществления гибочное устройство включает в себя синхронизирующий брус, прикрепленный к одной боковой стороне первого рабочего элемента, например, к каждому элементу матрицы, причем синхронизирующий брус протяжен в направлении «y» и прикреплен к профилю кулачка, и в котором синхронизирующий брус выполнен с возможностью равномерной передачи сил, приложенных к профилю кулачка в направлении «у», к первому рабочему элементу, например к элементу матрицы.
В соответствии с одним вариантом осуществления вспомогательные устройства расположены на каждой стороне нижней матрицы в направлении «y».
В соответствии с одним вариантом осуществления каждое или одно из вспомогательных устройств расположено напротив внешнего края первого рабочего элемента, например, одного из элементов матрицы. Предпочтительно, чтобы все вспомогательные устройства были расположены напротив внешнего края первого рабочего элемента, например, одного из элементов матрицы.
В соответствии с одним вариантом осуществления первый и второй боковые зажимы жестко соединены с каретками, установленными с возможностью скольжения в направлении «x» на направляющих, удерживаемых верхней рамой.
В соответствии с одним вариантом осуществления первый и второй элементы матрицы жестко соединены с каретками, установленными с возможностью скольжения в направлении «х» на направляющих, удерживаемых нижней рамой.
В соответствии с одним вариантом осуществления гибочное устройство выполнено с возможностью образования гофра, перпендикулярного гофру, предварительно образованному в металлическом листе, и гибочное устройство имеет один или несколько ножей, выполненных с возможностью деформации предварительно образованного гофра на любой стороне зоны пересечения между предварительно образованным гофром и образуемым гофром, причем два ножа установлены с возможностью перемещения на нижней раме между низким положением и высоким положением гибки предварительно образованного гофра.
В соответствии с одним вариантом осуществления гибочное устройство выполнено с возможностью образования гофра в металлическом листе, имеющем предварительно образованный гофр, протяженный в направлении, перпендикулярном образуемому гофру, причем каждый из первого и второго элементов матрицы имеют V-образную желобчатую конструкцию для принятия предварительно гофра.
В соответствии с одним вариантом осуществления каждый боковой зажим имеет охватываемый элемент, выступающий по направлению к нижней раме и имеющий V-образную форму, которая выполнена с возможностью вставки в канавку в элементе матрицы, расположенной напротив, когда боковые зажимы находятся в зажатом положении.
В соответствии с одним вариантом осуществления гибочное устройство включает в себя опорную пластину, соединяющую боковые зажимы с верхним пуансоном, и имеет возвратные элементы, оказывающие обратное усилие между каждым боковым зажимом и соответствующей опорной пластиной. Возвратными элементами являются пружины, газовые цилиндры, гидравлические цилиндры или пневматические цилиндры.
В соответствии с одним вариантом осуществления изобретение раскрывает способ использования гибочного устройства, как описано выше, включающий в себя этапы, на которых:
- располагают металлический листа на опоре так, чтобы он опирался на принимающие поверхности первого и второго элементов матрицы, и
- перемещают верхний пуансон из нерабочего положения в положение гибки согласованно с перемещением по меньшей мере одного или нескольких первого и второго элементов матрицы из открытого положения в закрытое положение, чтобы образовать гофр в металлическом листе.
Краткое описание чертежей
Изобретение может быть более понятным, и его дополнительные задачи, детали, признаки и преимущества изложены более четко в подробном описании ниже в нескольких конкретных вариантах осуществления изобретения, приведенных исключительно в качестве неограничивающих примеров со ссылкой на прилагаемые чертежи.
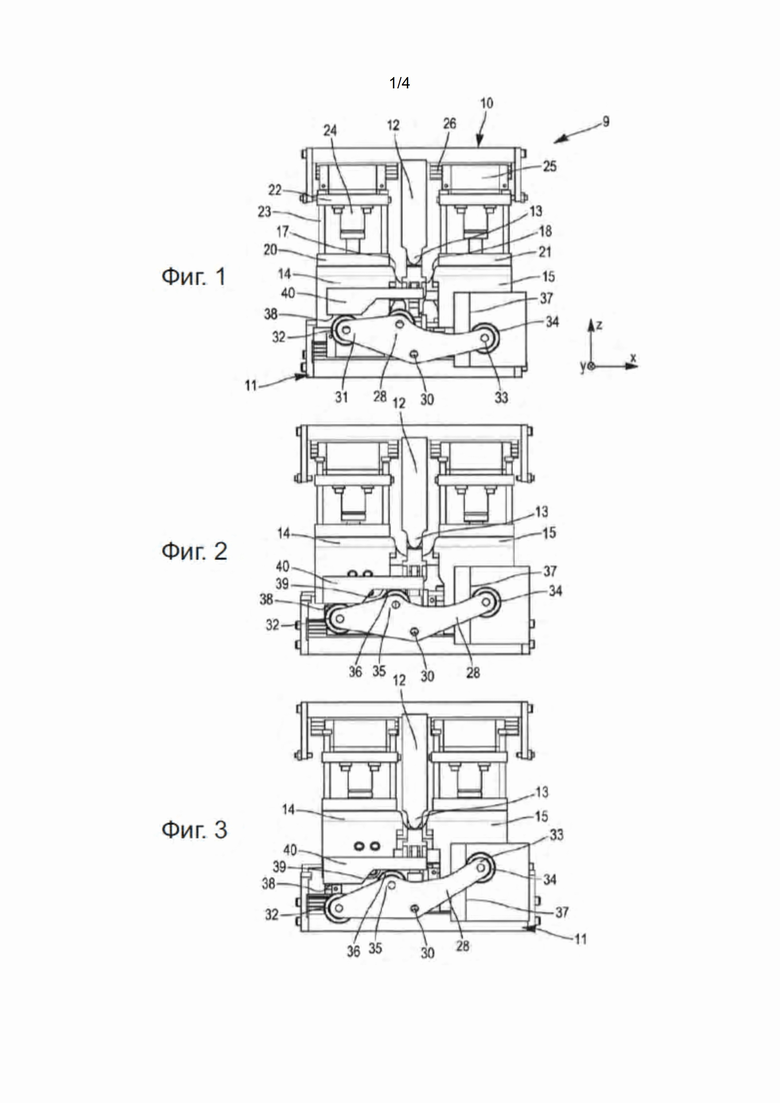
Фиг. 1 показывает схематический вид сбоку гибочного устройства согласно первому варианту осуществления в нерабочем положении,
Фиг. 2 показывает схематический вид сбоку гибочного устройства согласно первому варианту осуществления в первом промежуточном положении.
Фиг. 3 показывает схематический вид сбоку гибочного устройства согласно первому варианту осуществления во втором промежуточном положении.
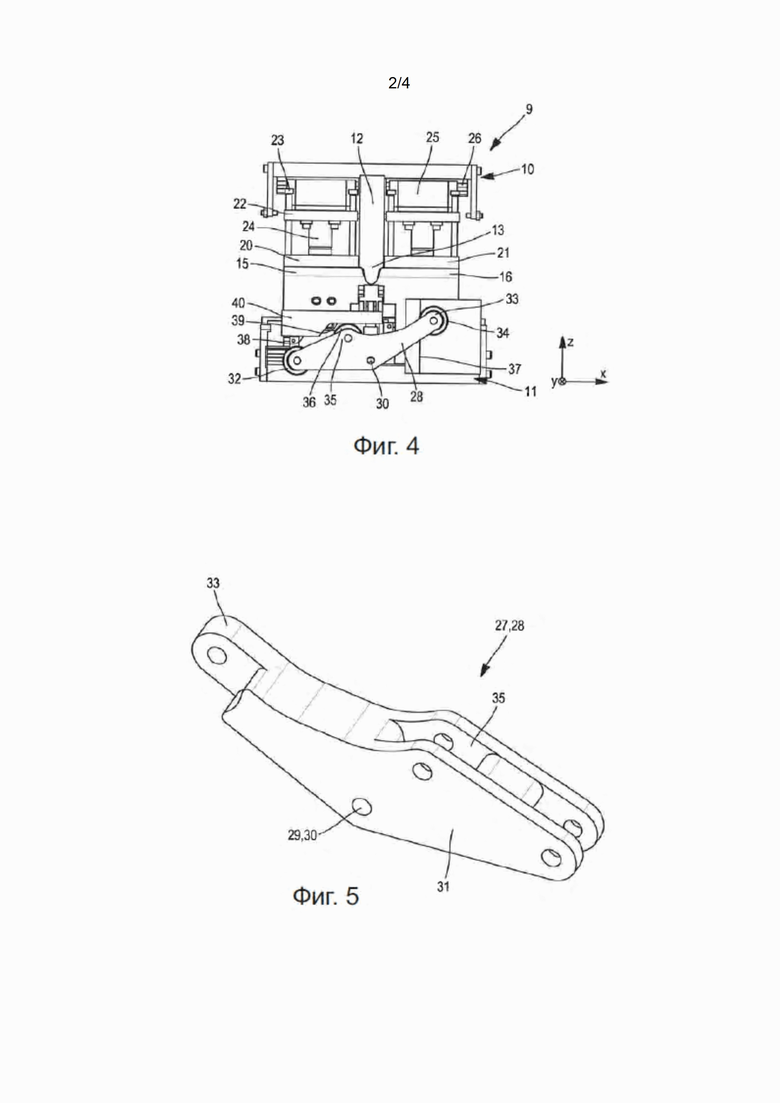
Фиг. 4 показывает схематический вид сбоку гибочного устройства в соответствии с первым вариантом осуществления в положении гибки.
Фиг. 5 показывает вид в перспективе рычага вспомогательного устройства гибочного устройства согласно первому варианту осуществления.
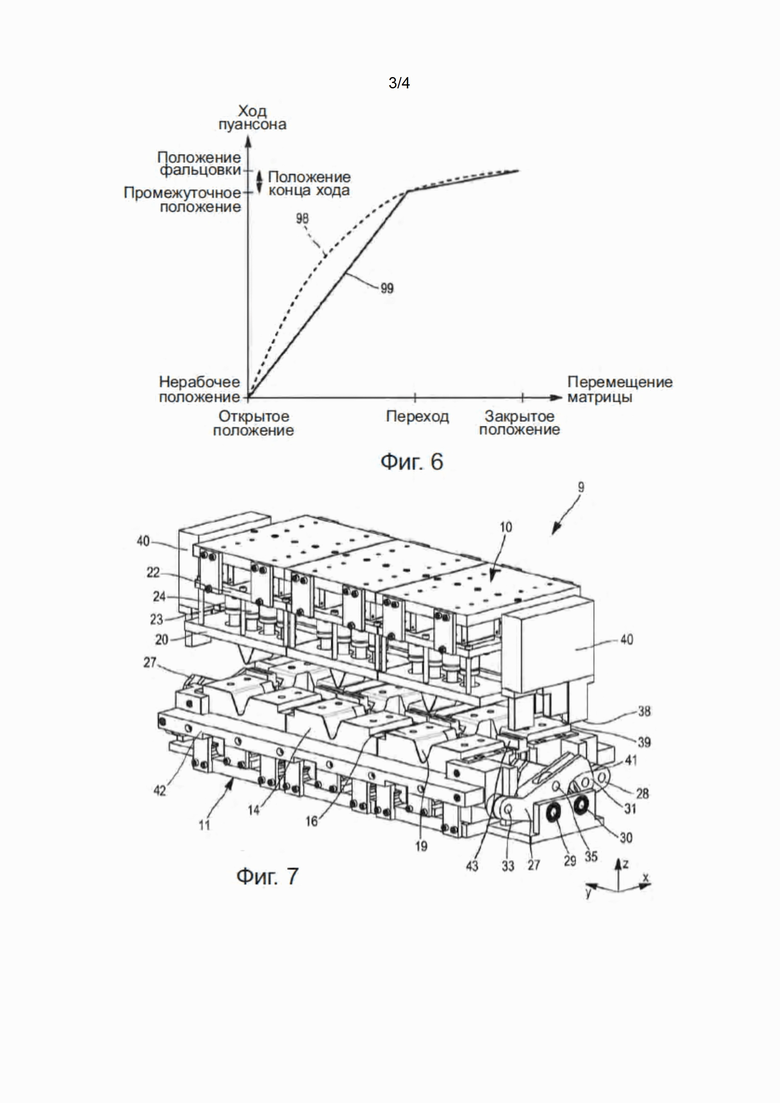
Фиг. 6 показывает график, показывающий взаимосвязь между ходом верхнего пуансона и перемещением нижней матрицы.
Фиг. 7 показывает вид в перспективе гибочного устройства согласно второму варианту осуществления в нерабочем положении.
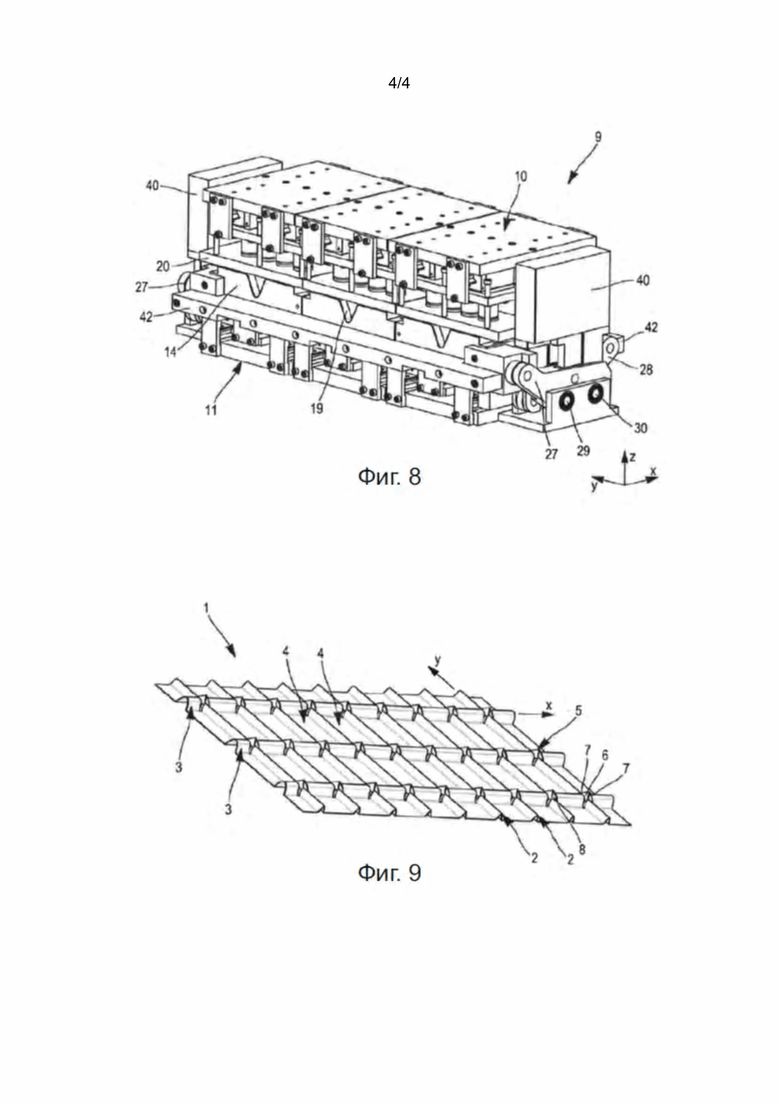
Фиг. 8 показывает вид в перспективе гибочного устройства согласно второму варианту осуществления в положении гибки.
Фиг. 9 показывает вид гофрированного металлического листа для использования в конструкции уплотнительной мембраны резервуара для хранения сжиженного природного газа.
Подробное описание вариантов осуществления
Условно, «продольная» ориентация гибочного устройства 9 параллельна оси «y», то есть параллельна направлению образуемого гофра 2, а «поперечная» ориентация параллельна оси «x», то есть поперечна направлению образуемого гофра 2.
На фиг.9 показан гофрированный металлический лист 1, который выполнен с возможностью образования уплотнительной мембраны резервуара для хранения криогенной текучей среды, такой как сжиженный природный газ.
Прямоугольный металлический лист 1 имеет первую группу параллельных гофров 2, называемых низкими гофрами, в направлении «y» от одного края листа к другому, и вторую серию параллельных гофров 3, называемых высокими гофрами, протяженными в направлении «х» от одного края металлического листа 1 к другому. Направления «x» и «y» серии гофров перпендикулярны. Гофры 2, 3, например, выступают от внутренней поверхности металлического листа 1 и выполнены с возможностью контакта с текучей средой, содержащейся в резервуаре. Края металлического листа 1 в этом случае параллельны гофрам 2, 3. Необходимо отметить, что термины «высокий» и «низкий» являются относительными и означают, что низкие гофры 2 короче, чем высокие гофры 3. В варианте, который не показан, гофры 2, 3 могут иметь одинаковую высоту.
Металлический лист 1 имеет множество плоских поверхностей 4 между гофрами 2, 3. При каждом пересечении между низким гофром 2 и высоким гофром 3 металлический лист 1 имеет узловую зону 5. Узловая зона 5 имеет центральный участок 6 с вершиной, выступающей внутрь или наружу резервуара. Кроме того, центральный участок 6 с одной стороны расположен на одной стороне при помощи пары вогнутых гофров 7, образованных в вершине высокого гофра 3, а с другой стороны парой армирующих элементов 8, пронизанных низким гофром 2.
Гофры 2, 3 в металлическом листе 1 делают уплотняющую мембрану гибкой, чтобы ее можно было деформировать под воздействием термических и механических напряжений, создаваемых сжиженным природным газом, хранящимся в резервуаре.
Металлический лист 1, в частности, может быть изготовлен из нержавеющей стали, алюминия, Invar®, то есть сплава железа и никеля с коэффициентом расширения обычно между 1,2×10-6 and 2×10-6 K-1, или из сплава железа с высоким содержанием марганца с коэффициентом расширения обычно около 7×10-6 K-1. Однако, также возможно использование других металлов и сплавов.
Например, металлический лист 1 имеет толщину приблизительно 1,2 мм. Возможны также другие толщины, принимая во внимание, что утолщение металлического листа 1 увеличивает его стоимость и обычно увеличивает жесткость гофров 2, 3. Например, металлический лист имеет ширину 1 метр и длину 3 метра.
Согласно предпочтительному варианту осуществления (не показан), два перпендикулярных края каждого металлического листа 1 изогнуты, то есть являются неровными, так что, когда металлические листы свариваются друг с другом, изогнутые края перекрывают противоположный край соседнего металлического листа.
На фиг. 1-4, 7 и 8 показано гибочное устройство 9, выполненное с возможностью образования низкого гофра 2, а также узловая зона 5 между указанным низким гофрром 2 и высоким гофром 3, образованным ранее.
Гибочное устройство 9 имеет верхнюю раму 10 и нижнюю раму 11. Верхняя рама 10 и нижняя рама 11 могут перемещаться вертикально относительно друг друга между нерабочим положением, показанным на фиг. 1 и 7, и положением гибки, показанным на фиг. 4 и 8.
Верхняя рама 10 снабжена верхним пуансоном 12 и, таким образом, способна оказывать давление на металлический лист, чтобы сгибать упомянутый лист и образовать гофр 2. Верхний пуансон 12 имеет головку 13 на своем нижнем конце, головка, выдвигающаяся в продольном направлении. Головка 13 имеет выпуклый участок с V-образным сечением, соответствующим форме образуемого гофра.
Кроме того, гибочное устройство 9 имеет нижнюю матрицу, содержащую первый элемент 14 матрицы и второй элемент 15 матрицы, которые установлены на нижней раме 11 горизонтально и с возможностью скольжения в поперечном направлении между открытым положением и закрытым положением. Элементы 14, 15 матрицы имеют принимающую поверхность 16, выполненную с возможностью прилегания к металлическому листу 1. Каждый элемент 14, 15 матрицы также имеет вогнутую половину рабочей формообразующей полости 17, 18 на краю, обращенную к другому элементу 14, 15 матрицы. Когда два элемента 14, 15 матрицы находятся в закрытом положении, половины рабочей формообразующей полости 17, 18 вместе образуют рабочую формообразующую полость, соответствующую форме образуемого гофра. Кроме того, в закрытом положении рабочая формообразующая полость расположена ниже головки 13 верхнего пуансона 12.
Возвратные элементы (не показаны) возвращают два элемента 14, 15 матрицы в открытое положение. Возвратными элементами являются, например, пружины или цилиндры, каждый из которых, с одной стороны, нажимает на один из элементов 14, 15 матрицы, а с другой стороны, на элемент, который является статичным по отношению к нижней раме 11. Согласно другому варианту выполнения (не показан), возвратными элементами являются пружины или цилиндры, концы которых нажимают на к один или другой из двух элементов 14, 15 матрицы соответственно.
Каждый элемент 14, 15 матрицы жестко соединен с каретками, установленными горизонтально и с возможностью скольжения в поперечном направлении по направляющим, удерживаемым нижней рамой 11.
Каждый из элементов 14, 15 матрицы имеет свободное пространство в среднем участке, которое ориентировано в поперечном направлении, например, V-образный паз 19, проходящий в поперечном направлении и позволяющий проходить предварительно образованному гофру.
Гибочное устройство также имеет контактные части 43, которые показаны на фиг. 7 и которые могут перемещаться вертикально на нижней раме 11. Каждая из контактных частей 43 имеет опорную поверхность, расположенную на внутренней стороне пресс-формы матрицы, то есть между двумя элементами 14, 15 матрицы. Опорные поверхности контактных частей находятся на одном уровне с принимающей поверхностью 16 элементов 14, 15 матрицы, когда верхняя рама 10 находится в нерабочем положении. Такие контактные части 43, в частности, описаны в заявке FR 3057185.
Кроме того, верхняя рама 10 удерживает два боковых зажима 20, 21, выступающих соответственно на каждой стороне верхнего пуансона 12. Боковые зажимы 20, 21 расположены напротив друг друга над элементом 14, 15 матрицы. Боковые зажимы 20, 21 удерживают верхнюю раму 10 и, таким образом, они могут перемещаться вертикально из освобожденного положения в зажатое положение, в котором боковые зажимы прижимают металлический лист 1 к принимающей поверхности 16 элементов 14, 15 матрицы, когда верхняя рама 10 перемещается к нижней раме 11.
Боковые зажимы 20, 21 также установлены вертикально и возможностью вертикального движения по отношению к верхней раме 10. Для этого каждый боковой зажим 20, 21 установлен вертикально с возможностью скольжения на опорной пластине 22 с помощью направляющего устройства. Направляющее устройство имеет множество направляющих 23, которые жестко соединены с каждым из боковых зажимов 24, 25 и установлены с возможностью скольжения в отверстиях, образованных в опорной пластине 22. Кроме того, газовые цилиндры 24, также называемые газовыми пружинами, имеют первый конец, прикрепленный к опорной пластине 22, и второй конец, прикрепленный к одному из боковых зажимов 20, 21. Газовые цилиндры 24 оказывают силовое воздействие на боковые зажимы 20, 21, которые перемещают боковые зажимы вниз от опорной пластины 22. Это расположение позволяет перемещать боковые зажимы 20, 21 в зажатое положение и верхний пуансон 12 в положение гибки одновременно, перемещая верхнюю раму 10 вниз к нижней раме 11. Альтернативно, газовые цилиндры 24 могут быть заменены любыми другими эквивалентными возвратными средствами, такими как, например, спиральные пружины или пневматические или гидравлические цилиндры.
Боковые зажимы 20, 21 установлены горизонтально и с возможностью скольжения в поперечном направлении, которое перпендикулярно продольному направлению образуемого гофра, между открытым положением и закрытым положением. Для этого каждая опорная пластина 22 жестко соединена с каретками 25, которые установлены с возможностью скольжения на направляющих 26, удерживаемых верхней рамой 10. Кроме того, один или несколько возвратных элементов (не показаны) возвращают боковые зажимы 20, 21 в открытое положение.
Кроме того, гибочное устройство 9 имеет вспомогательные устройства, выполненные с возможностью содействия перемещению элементов 14, 15 матрицы в закрытое положение. Вспомогательные устройства гарантируют, что элементы 14, 15 матрицы и, следовательно, боковые зажимы 20, 21 перемещаются на всю длину ходу, то есть до закрытого конечного положения, во время перемещения верхнего пуансона 12 в положение гибки.
Вспомогательные устройства имеют по меньшей мере один рычаг 27, 28 для каждого элемента 14, 15 матрицы, показанных, в частности, на фиг. 5 отдельно и на фиг. 1-4, установленных на гибочном устройстве с возможностью поворота на нижней раме 11. Рычаги 27, 28 могут вращаться вокруг горизонтальной оси вращения 29, 30, ориентированной параллельно продольному направлению.
В упомянутом варианте выполнения вспомогательные устройства имеют два рычага 27 или два рычага 28 для каждого из элементов 14, 15 матрицы. Два рычага 27 или 28, которые способствуют перемещению одного элемента 14, 15 матрицы, находятся в зеркальной симметрии с другим элементом поперек средней плоскости нижней рамы 11, и оси вращения 39, 40 выровнены. Два рычага 27 или 28, выполненные с возможностью содействия перемещению одного элемента 14, 15 матрицы, расположены по обе стороны поперечной средней плоскости нижней рамы, что позволяет распределять вспомогательные силы, действующие на элементы 15, 16 матрицы. равномерно.
Каждый из рычагов 27, 28 имеет первый конец 31, который выполнен с возможностью перемещения в направлении нижней рамы 11, когда верхний пуансон 12 перемещается из нерабочего положения (фиг. 1 и 7) в его положение гибки (фиг. 4 и 8). ), как для поворота указанного рычага 27, 28. Первый конец 31 каждого из рычагов 27, 28 имеет место для установки первого направляющего ролика 32.
Как показано, в частности, на фиг.5, каждый из рычагов 27, 28 также имеет второй конец 33, расположенный напротив первого конца 31. Второй конец 33 выполнен с возможностью контакта с участком первого или второго элемента 14, 15 матрицы. Во время вращения рычага 27, 28 вокруг оси вращения 29, 30 второй конец 33 перемещается, что оказывает усилие на участок первого или второго элемента 14, 15 матрицы для перемещения первого или второго элемента 14, 15 матрицы в направлении «х» к закрытому положению.
Второй конец 33 имеет посадочное место для установки кулачкового ведомого звена, который в представленных вариантах осуществления представляет собой второй направляющий ролик 34, собранный на горизонтальной оси, ориентированной в продольном направлении. Второй ролик 34 является элементом второго конца 33, который находится в контакте с участком первого или второго элемента 14, 15 матрицы. Кроме того,участок первого и второго элементов 14, 15 матрицы, которая контактирует с кулачковым ведомым звеном, представляет собой кулачковый профиль 37, при этом кулачковое ведомое звено, снабженное вторым роликом 34, затем перемещается при движении рычага 27, 28 вдоль профиля 37 кулачка.
Рычаги 27, 28 имеют промежуточный участок 35, которая расположена между осью вращения 29, 30 и первым концом 31. Промежуточный участок имеет посадочное место, которое снабжено третьим роликом 36. Первый ролик 32, второй ролик 34 и третий ролик 36 могут быть одинаковыми или разными роликами. В представленных вариантах осуществления ролики 32, 34, 36 являются одинаковыми.
Верхняя рама 10 имеет концевые участки 40, расположенные на концах верхнего пуансона 12 в направлении «y», которые расположены в той же поперечной плоскости, что и рычаги 27, 28 по обе стороны от нижней матрицы, чтобы снова контактировать с рычагами 27, 28, когда верхний пуансон 12 опускается. Концевые участки 40 включают в себя первые опорные поверхности 38 и вторые опорные поверхности 39. Вторая опорная поверхность 39 смещена от первой опорной поверхности 38 в направлении «z».
Во время перемещения верхнего пуансона 12 концевые участки 40 перемещаются по направлению к рычагам 27, 28. Затем первые опорные поверхности 38 снова контактируют с первыми роликами 32 рычагов 27, 28 и оказывают силовое воздействие в направлении «z» на первые ролики 32, которые заставляют рычаги 27, 28 вращаться с первой скоростью вращения Затем вторые опорные поверхности 39 также снова контактируют с третьими роликами 36 рычагов 27, 28 и оказывают силовое воздействие в направлении» z» на третьи ролики 36, которое заставляет рычаги 27, 28 вращаться со второй скоростью вращения. Вторая скорость вращения больше первой скорости вращения, потому что третий ролик 36 находится ближе к оси вращения 29, 30 рычага 27, 28, чем первый ролик 32.
Рычаг 27, 28 включает в себя множество сквозных отверстий, позволяющих проходить оси вращения 29, 30, соединенной с нижней рамой 11, и осями роликов 32, 34, 36, позволяющими соединять ролики 32, 34, 36 с рычагом 27, 28. Рычаг 27, 28 выполнен с возможностью приема роликов 32, 34, 36 без роликов, выступающих в направлении толщины рычага 27, 28, то есть в направлении «y», когда рычаг собран. Следовательно, размер рычага 27, 28 не увеличивается роликами 32, 34, 36.
Два рычага 27, 28 протяжены в двух разных поперечных плоскостях, чтобы не мешать друг другу. Кроме того, два рычага 27, 28 поворачиваются в противоположных направлениях вращения, когда верхний пуансон 12 перемещается в направлении нижней рамы 11.
В варианте осуществления, показанном на фиг. 1-4, рычаги 27, 28 имеют общую ось вращения 29, 30. И наоборот, в осуществления выполнения, показанном на фиг. 7 и 8, ось вращения 29 первого рычага 27 смещена от оси вращения 30 второго рычага 28 в направлении «х». В этом варианте осуществления рычаг 27, 28 упрочнен 41 между его первым концом 31 и промежуточным участком 35, так что рычаг 27, 28 не упирается в ось вращения 29, 30 другого рычага 28, 27 при вращении.
На фиг. 1-4 показано гибочное устройство 9, используемое для образования гофра в металлическом листе 1. Таким образом, на фиг. 1-4 показано взаимодействие между движением верхнего пуансона 12 и движением элементов 14, 15 матрицы посредством рычагов 27, 28. Чтобы сделать чертежи более понятными, показан только один из рычагов 27, 28 и один из кулачковых профилей 37. Рычаг 27, 28 и кулачковый профиль 37, которые не показаны, действуют аналогичным образом на другой элемент 14, 15 матрицы, как показанные рычаг и кулачковый профиль.
Как только металлический лист 1 помещен между боковыми зажимами 20, 21 и элементами 14, 15 матрицы, верхний пуансон 12 опускается в направлении нижней рамы 11 с постоянной скоростью. Затем боковые зажимы 20, 21 вступают в контакт с металлическим листом 1 и с помощью газовых цилиндров 24 оказывают давление на лист, чтобы зажать листы между элементами 14, 15 матрицы и боковыми зажимами 20. 21. Концевые участки 40 верхнего пуансона 12 также перемещаются одновременно с пуансоном 12. Головка 13 верхнего пуансона 12 затем входит в контакт с металлическими листами, чтобы начать образование гофра 2. Чтобы не растягивать металлический лист 1 необходимо содействовать перемещению элементов 14, 15 матрицы в направлении «х», чтобы элементы матрицы перемещались одновременно с верхним пуансоном 12.
Для этого концевые участки 40 через свои первые опорные поверхности 38 оказывают силовое воздействие в направлении «z» на первые ролики 32 рычагов 27, 28, как показано на фиг. 1. Это усилие на первые ролики 32 заставляет рычаги 27, 28 вращаться вокруг оси вращения 29, 30 с первой скоростью вращения. Таким образом, второй ролик 34, расположенный на втором конце 33 рычагов 27, 28, также перемещается с первой скоростью вращения. Затем вторые ролики 34 оказывают усилие на кулачковый профиль 37 элементов 14, 15 матрицы в направлении «х», заставляя упомянутые элементы матрицы перемещаться из открытого положения в закрытое положение с первой скоростью поступательного движения.
Затем, продолжая опускать верхний пуансон 12 к нижней матрице, вторые опорные поверхности 39 концевых участков 40 вступают в контакт с третьими роликами 36 рычагов 27, 28, как показано на фиг. 2. На этом этапе первый ролик 32 и третий ролик 36 находятся в контакте с концевым участком 40. Это положение пуансона 12 называется промежуточным положением. Поскольку третий ролик 36 находится ближе к оси вращения 29, 30, сила, приложенная к нему в направлении «z», приводит к большему вращению рычага 27, 28 со второй скоростью вращения. Поскольку скорость вращения выше промежуточного положения, в то время как скорость поступательного движения пуансона остается постоянной, первый ролик 32 и первая опорная поверхность 38 больше не соприкасаются, как видно на фиг. 3. При этой второй скорости вращения второй ролик 34 также перемещается с этой скоростью, а затем прикладывает новое усилие к кулачковому профилю 37 элементов 14, 15 матрицы в направлении «x», заставляя упомянутые элементы матрицы быстрее перемещаться к закрытому положению на второй поступательной скорости.
Верхний пуансон 12 затем достигает конца хода в положении гибки с постоянной скоростью, в то время как элементы 14, 15 матрицы достигают конца хода в закрытом положении со второй скоростью поступательного движения, как показано на фиг. 4.
Гибочное устройство 9 также имеет синхронизирующие брусья 42, как показано на фиг. 7 и 8, расположенные с обеих сторон элементов 14, 15 матрицы. Синхронизирующие брусья 42 протяжены в направлении «y» и прикреплены к двум противоположным кулачковым профилям 37. Синхронизирующие брусья 42 также прикреплены по всей длине к одному из элементов 14, 15 матрицы. Таким образом, когда второй ролик 34 прикладывает усилие к кулачковому профилю 37 в направлении «x», эта сила повторно передается через синхронизирующие брусья 42 по всей длине элемента 14, 15 матрицы, заставляя элемент 14, 15 матрицы двигаться синхронно в направлении «х» по всей длине.
На фиг. 6 показан график, показывающий движение нижней матрицы по оси Х и ход пуансона по оси Y. На этом графике показаны две кривые: одна представляет теоретическую кривую 98 гибки без растяжения металлического листа, а другая кривая 99 показывает движение гибочного устройства, описанного выше. Действительно, чтобы гарантировать, что металлический лист 1 не растягивается, желательно, чтобы перемещение матрицы в зависимости от перемещения пуансона 12 было как можно ближе к теоретической кривой 98 без растяжения. Расчет показывает, что скорость перемещения матрицы должна быть функцией скорости пуансона, умноженной на возрастающую функцию, приблизительно равную синусу угла, образованного участком металлического листа 1, вставленного в рабочую формообразующую полость, с направлением «x». Изменение скорости, вызванное тягой на третьем ролике 36 рычага 27, 28 после промежуточного положения, позволяет приблизить эту кривую, в частности, в положении конца хода пуансона 12, где силы, и, следовательно, риск растяжения, самые большие. Следовательно, угол наклона кривой 99 является обратным соотношению скоростей между скоростью элемента матрицы и скоростью пуансона.
Изобретение, описанное выше со ссылкой на вариант осуществления, в котором кривая 99, представляющая перемещение матрицы как функцию хода пуансона 12, является интерполяционной кривой теоретической кривой 98 с использованием двух линейных функций. Кривая 99 также может быть интерполяционной кривой теоретической кривой 98 с использованием трех или более линейных функций или с использованием двух или более других функций, например квадратичных функций.
На фиг. 1-8 показан вариант осуществления, в котором соотношение скоростей изменяется в соответствии с двумя различными и ненулевыми значениями, образуя, таким образом, кривую с использованием двух линейных функций. Чтобы изменять соотношение скоростей более чем на два значения и, таким образом, иметь кривую, образованную более чем двумя линейными функциями, можно адаптировать гибочное или формообразующее устройство в соответствии с осуществления, которые не показаны.
В варианте осуществления, который не показан, первый рычаг 27 и второй рычаг 28 могут включать в себя четвертый направляющий ролик, расположенный между первым роликом 32 и третьим роликом 36. Гибочное устройство также может включать в себя третью опорную поверхность, расположенную между первой опорной поверхностью 38 и второй опорной поверхностью 39 в направлении «z», причем третья опорная поверхность выполнена с возможностью опираться на четвертый ролик. Таким образом, такое гибочное устройство позволяет получить три разных значения соотношения скоростей, образуя таким образом кривую, содержащую три линейные функции.
Обобщая, можно установить N направляющих роликов между первым роликом 32 и осью 29, 30 вращения на рычагах с таким же количеством опорных поверхностей, что и ролики на рычаге 27, 28, чтобы получить N изменений соотношения скоростей, чтобы наилучшим образом приблизить теоретическую кривую 98 гибки без растяжения и получить кривую, включающую N линейных функций.
В другом варианте осуществления, который не показан, опорные поверхности 38, 39 могут быть кривыми опорными поверхностями, позволяющими изменять скорость вращения рычагов 27, 28 в соответствии с движением опорных поверхностей 38, 39 и, следовательно, скоростью элементов 14, 15 матрицы. Этот вариант осуществления позволяет изменять соотношение скоростей более чем на два разных значения без увеличения количества роликов, установленных на рычагах 27, 28.
В другом варианте осуществления, который не показан, кулачковые профили 37 элементов 14, 15 матрицы могут быть кривыми поверхностями относительно плоской поверхности, перпендикулярной направлению «x», что позволяет изменять скорость элементов 14, 15 матрицы в соответствии с положением второго ролика 34 на кулачковом профиле 37. Этот вариант осуществления позволяет изменять соотношение скоростей более чем на два разных значения без увеличения количества роликов, установленных на рычагах 27, 28.
Эти не проиллюстрированные варианты осуществления могут сочетаться друг с другом и/или включать в себя признаки варианта осуществления, показанного на Фиг.1-8.
Хотя изобретение было описано применительно к нескольким конкретным вариантам осуществления, оно, очевидно, никоим образом не ограничено ими и включает в себя все технические эквиваленты описанных средств и сочетаний, если они входят в объем охраны изобретения.
Использование глагола «содержать» или «включать в себя», включая формы спряжения, не исключает наличия других элементов или других этапов, помимо упомянутых в формуле изобретения.
В формуле изобретения ссылочные позиции между скобками не следует понимать как ограничение формулы изобретения.
Изобретение относится к обработке металлов давлением и может быть использовано для образования гофра в металлическом листе, который используется в конструкции уплотнительной мембраны резервуара для хранения текучей среды. Гибочное устройство (9) содержит верхнюю (10) и нижнюю (11) рамы, нижнюю матрицу с первым и вторым элементами (14), верхний пуансон и первый и второй боковые зажимы (20). Предусмотрено вспомогательное устройство, выполненное с возможностью содействия перемещению по меньшей мере одного из первого и второго элементов (14) в закрытое положение вместе с перемещением пуансона в положение гибки. Вспомогательное устройство обеспечивает перемещение по меньшей мере одного из первого и второго элементов (14) в соответствии с соотношением скоростей, которое изменяется между нерабочим положением и положением гибки. Соотношение скоростей является соотношением между линейной скоростью элемента (14) матрицы в направлении «х» и линейной скоростью верхнего пуансона в направлении «z». В результате обеспечивается контроль степени растяжения материала при образовании гофра. 2 н. и 18 з.п. ф-лы, 9 ил.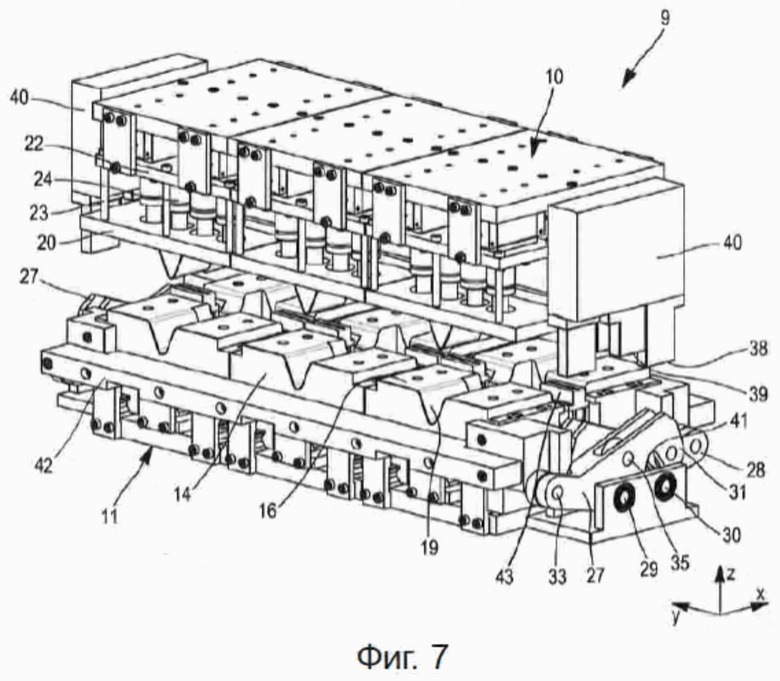
1. Гибочное устройство (9), используемое для формирования гофра (2) в металлическом листе (1), предназначенном для изготовления уплотнительной мембраны резервуара для хранения жидкости, и содержащее
верхнюю раму (10),
нижнюю раму (11),
нижнюю матрицу, содержащую первый и второй элементы (14, 15) матрицы, каждый из которых имеет приемную поверхность (16), и вогнутую половину рабочей формообразующей полости (17, 18), причем каждый из первого и второго элементов (14, 15) матрицы установлен с возможностью скольжения на нижней раме (11) в направлении «x», чтобы обеспечить скольжение между открытым положением и закрытым положением, при этом половины рабочих формообразующих полостей (17, 18) первого и второго элементов (14, 15) матрицы вместе определяют рабочую формообразующую полость, соответствующую форме гофра (2), который должен быть сформирован, когда первый и второй элементы (14, 15) матрицы находятся в закрытом положении;
верхний пуансон (12), расположенный над нижней матрицей и жестко соединенный с верхней рамой (10), имеющий нижний конец, снабженный головкой (13), имеющей форму, по существу соответствующую форме рабочей формообразующей полости, причем упомянутый верхний пуансон (12), который может перемещаться в направлении «z», перпендикулярном направлению «x» относительно нижней рамы (11) между нерабочим положением и положением гибки, в котором головка (13) указанного верхнего пуансона (12) зацепляется внутри рабочей формообразующей полости нижней матрицы, чтобы прижать металлический лист (1),
первый и второй боковые зажимы (20, 21), расположенные на каждой стороне верхнего пуансона (12), над нижней матрицей, соответственно напротив первого и второго элементов (14, 15) матрицы, причем упомянутые первый и второй боковые зажимы (20, 21) установлены с возможностью скольжения в направлении «х» между закрытым положением и открытым положением, при этом первый и второй боковые зажимы (20, 21) имеют возможность перемещаться вертикально относительно нижней рамы (11) между освобожденным положением и зажатым положением, в котором первый и второй боковые зажимы (20, 21) соответственно перемещаются по направлению к приемной поверхности первого элемента (14) матрицы и второго элемента (15) матрицы так, чтобы закрепить металлический лист на принимающей поверхности первого и второго элементов матрицы,
вспомогательное устройство, выполненное с возможностью содействия перемещению по меньшей мере одного из первого и второго элементов (14, 15) матрицы по направлению к закрытому положению согласованно с движением верхнего пуансона (12) по направлению к положению гибки, причем вспомогательное устройство выполнено с возможностью перемещения по меньшей мере одного из первого и второго элементов (14, 15) матрицы с соотношением скоростей, которое изменяется между нерабочим положением и положением гибки, причем это соотношение скоростей представляет собой соотношение между линейной скоростью по меньшей мере одного первого и второго элемента (14, 15) матрицы в направлении «x» и линейной скоростью верхнего пуансона (12) в направлении «z»,
в котором вспомогательное устройство имеет первый рычаг (27) и второй рычаг (28), которые установлены с возможностью поворота на нижней раме (11) вокруг оси (29, 30) вращения, ориентированной в направлении «y», ортогональном направлениям «x» и «z», первый рычаг (27) и второй рычаг (28), каждый из которых имеет первый конец (31), выполненный с возможностью перемещения опорной поверхностью (38), жестко соединенной с верхней рамой (10) во время перемещения верхнего пуансона (12) из нерабочего положения в положение гибки, причем перемещение первого конца (31) первого рычага (27) и перемещение первого конца (31) второго рычага (28) вызывает перемещение второго конца (33) первого рычага (27) и перемещение второго конца (33) второго рычага (28) при вращении вокруг оси (29, 30) вращения, второй конец (33) первого рычага (27) и второй конец (33) второго рычага (28) снабжены кулачковым ведомым звеном, а толкатели кулачка первого и второго рычагов (27, 28) выполнены с возможностью взаимодействия с кулачковым профилем (37), удерживаемым первым элементом (14) матрицы, и кулачковым профилем (37), удерживаемым вторым элементом (15) матрицы, причем толкатель кулачка и кулачковый профиль (37) выполнены таким образом, что во время вращения, вызванного перемещением верхнего пуансона (12) из нерабочего положения в положение гибки, кулачковое ведомое звено прикладывает усилие к кулачковому профилю (37), стремясь переместить первый элемент (14) матрицы или второй элемент (15) матрицы в направлении «х» в направлении к его закрытому положению.
2. Гибочное устройство (9) по п. 1, в котором соотношение скоростей увеличивается между нерабочим положением и положением гибки.
3. Гибочное устройство (9) по п. 1 или 2, в котором соотношение скоростей принимает значения n последовательно между нерабочим положением и положением гибки, причем n является целым числом, равным или большим 2.
4. Гибочное устройство (9) по п. 3, в котором вспомогательное устройство выполнено с возможностью перемещения по меньшей мере одного из первого и второго элементов (14, 15) матрицы в соответствии с первым значением соотношения скоростей между нерабочим положением и промежуточным положением и в соответствии со вторым значением соотношения скоростей между промежуточным положением и положением гибки.
5. Гибочное устройство (9) по п. 4, в котором второе значение соотношения скоростей больше первого значения соотношения скоростей.
6. Гибочное устройство (9) по любому предшествующему пункту, в котором вспомогательное устройство выполнено с возможностью содействия перемещению первого и второго элементов (14, 15) матрицы в закрытое положение согласованно с перемещением верхнего пуансона (12) по направлению к положению гибки и выполнено с возможностью перемещения первого и второго элементов (14, 15) матрицы согласно соотношению скоростей, изменяющемуся от нерабочего положения до положения гибки.
7. Гибочное устройство (9) по любому из пп. 1-6, в котором первый рычаг и второй рычаг вспомогательного устройства совместно используют одну и ту же ось вращения.
8. Гибочное устройство (9) по любому из пп. 1-6, в котором ось (29) вращения первого рычага (27) смещена от оси (30) вращения второго рычага (28) в направлении «х».
9. Гибочное устройство (9) по любому из пп. 1-8, в котором первый конец (31) каждого из первого и второго рычагов (27, 28) имеет первый направляющий ролик (32), на который опирается опорная поверхность (38), жестко соединенная с опорами верхней рамы (10).
10. Гибочное устройство (9) по любому из пп. 1-9, в котором кулачковое ведомое звено имеет второй направляющий ролик (34).
11. Гибочное устройство (9) по любому из пп. 1-10, в котором кулачковый профиль (37) представляет собой плоскую поверхность, перпендикулярную направлению «x».
12. Гибочное устройство (9) по одному из пп. 1-11, в котором опорная поверхность, жестко соединенная с верхней рамой (10), представляет собой первую опорную поверхность (38), причем гибочное устройство имеет вторую опорную поверхность (39), жестко соединенную с верхней рамой (10), вторая опорная поверхность (39) смещена в направлении «z» от первой опорной поверхности (38), и рычаг (27, 28) имеет промежуточный участок (35), расположенный между первым концом (31) и вторым концом (33), при этом промежуточный участок (35) содержит третий направляющий ролик (36) и вторая опорная поверхность (39) выполнена с возможностью опоры на третий направляющий ролик (36) промежуточного участка (35).
13. Гибочное устройство (9) по п. 9, в котором опорная поверхность, жестко соединенная с верхней рамой (10), представляет собой первую опорную поверхность (38), причем гибочное устройство имеет вторую опорную поверхность (39), жестко соединенную с верхней рамой (10), вторая опорная поверхность (39) смещена в направлении «z» от первой опорной поверхности (38) и рычаг (27, 28) имеет промежуточный участок (35), расположенный между первым концом (31) и вторым концом (33), при этом промежуточный участок (35) содержит третий направляющий ролик (36) и вторая опорная поверхность (39) выполнена с возможностью опоры на третий направляющий ролик (36) промежуточного участка (35) и в котором расстояние между осью (29, 30) вращения рычага (27, 28) и третьим роликом (36) строго меньше, чем расстояние между осью (29, 30) вращения рычага (27, 28) и первым роликом (32).
14. Гибочное устройство (9) по п. 9, в котором опорная поверхность, жестко соединенная с верхней рамой (10), представляет собой первую опорную поверхность (38), причем гибочное устройство имеет вторую опорную поверхность (39), жестко соединенную с верхней рамой (10), вторая опорная поверхность (39) смещена в направлении «z» от первой опорной поверхности (38) и рычаг (27, 28) имеет промежуточный участок (35), расположенный между первым концом (31) и вторым концом (33), при этом промежуточный участок (35) содержит третий направляющий ролик (36) и вторая опорная поверхность (39) выполнена с возможностью опоры на третий направляющий ролик (36) промежуточного участка (35), в котором первое значение соотношения скоростей получено посредством первой опорной поверхности (38), опирающейся на первый ролик (32) первого конца (31).
15. Гибочное устройство (9) по одному из пп. 12-14, в котором второе значение соотношения скоростей получено посредством второй опорной поверхности (39), опирающейся на третий ролик (36) промежуточного участка (35).
16. Гибочное устройство (9) по п 9, в котором опорная поверхность, жестко соединенная с верхней рамой (10), представляет собой первую опорную поверхность (38), причем гибочное устройство имеет вторую опорную поверхность (39), жестко соединенную с верхней рамой (10), вторая опорная поверхность (39) смещена в направлении «z» от первой опорной поверхности (38) и рычаг (27, 28) имеет промежуточный участок (35), расположенный между первым концом (31) и вторым концом (33), при этом промежуточный участок (35) содержит третий направляющий ролик (36) и вторая опорная поверхность (39) выполнена с возможностью опоры на третий направляющий ролик (36) промежуточного участка (35) и в котором промежуточное положение верхнего пуансона (12) определено тем фактом, что первая опорная поверхность (38) находится в контакте с первым роликом (32), а вторая опорная поверхность (39) находится в контакте с третьим роликом (36).
17. Гибочное устройство (9) по любому из пп. 1-16, включающее в себя синхронизирующий брус (42), прикрепленный к одной боковой стороне каждого элемента (14, 15) матрицы, причем синхронизирующий брус (42) протяжен в направлении «y» и прикреплен к кулачковому профилю (37), и в котором синхронизирующий брус (42) выполнен с возможностью равномерной передачи сил, приложенных к кулачковому профилю (37) в направлении «у», к элементу (14, 15) матрицы.
18. Гибочное устройство (9) по любому из предшествующих пунктов, в котором вспомогательное устройство представляет собой первое вспомогательное устройство, а гибочное устройство включает в себя второе вспомогательное устройство, при этом первое и второе вспомогательные устройства расположены на каждой стороне нижней матрицы в направлении «y».
19. Гибочное устройство (9) по любому из предшествующих пунктов, в котором соотношение скоростей между линейной скоростью элемента (14, 15) матрицы в направлении «x» и линейной скоростью верхнего пуансона (12) в направлении «z» изменяется в виде возрастающей функции во время движения сгибания, возрастающая функция приблизительно равна синусу угла, образованного металлическим листом во время движения сгибания, угол составляет от 0 до 90 градусов.
20. Способ использования гибочного устройства по одному из пп. 1-19, чтобы образовать гофр (2) в металлическом листе (1), предназначенном для изготовления уплотнительной мембраны резервуара для хранения жидкости, содержащий этапы, на которых
располагают металлический лист (1) для опоры на принимающие поверхности первого и второго элементов (14, 15) матрицы и
перемещают верхний пуансон (12) из нерабочего положения в положение гибки согласованно с перемещением по меньшей мере одного из первого и второго элементов (14, 15) матрицы из открытого положения в закрытое положение, чтобы образовать гофр (2) в металлическом листе (1).
| WO 2015170054 A1, 12.11.2015 | |||
| Штамп для изготовления полос с поперечными гофрами | 1982 |
|
SU1091962A1 |
| Штамп для гофрирования заготовок в виде металлических лент | 1987 |
|
SU1461560A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ЛЕНТЫ С ГОФРАМИ, РАСПОЛОЖЕННЫМИ В ШАХМАТНОМ ПОРЯДКЕ | 2008 |
|
RU2363556C1 |
| WO 2016034782 A1, 10.03.2016. | |||

