ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к гибочной системе для формирования гофра в части, такой как угловая часть, в частности, предназначенной для изготовления уплотнительной мембраны резервуара для хранения текучей среды, такой как сжиженный газ.
[0002] Изобретение также относится к способу использования гибочной системы.
УРОВЕНЬ ТЕХНИКИ
[0003] Документ WO201630619 раскрывает гибочную систему для формирования гофра в угловой части, включающей в себя два фланца, наклонённых относительно друг друга и соединяющихся на уровне линии сгиба. Гибочная система включает в себя нижнюю раму, центральный штамповочный элемент, соответствующий форме центрального участка гофра, два боковых штамповочных элемента, способных формировать отпечаток, соответствующий форме первого и второго участков гофра, верхнюю раму, выполненную с возможностью перемещения в вертикальном направлении, центральный пуансон, способный зацепляться внутри отпечатка центрального штамповочного элемента во время перемещения верхней рамы в её положение гибки, два подвижных узла, каждый из которых включает в себя две подштамповые подушки и палец-пуансон, предназначенный для формирования первого или второго участка гофра. Центральный участок гофра, включающий в себя линию сгиба, деформируется центральным пуансоном, при этом пальцы-пуансоны имеют сложные формы таким образом, чтобы создавать первый и второй участки гофра и формировать удлиняющие зоны первого и второго участков в поперечном направлении с соответственных противоположных сторон от центрального участка.
[0004] В связи с этим гибочная система этого типа не является полностью удовлетворительной, в частности, из-за того, что она требует использования пальцев-пуансонов, имеющих сложные формы, которые трудно и дорого изготавливать. Кроме того, вышеупомянутая гибочная система не регулируема и предназначена для формирования угловой части, имеющей конкретный угол. В связи с этим гибочная система не способна легко адаптироваться к гибке гофра в угловых частях, имеющих разные углы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Одна идея, лежащая в основе изобретения, состоит в предложении гибочной системы, обеспечивающей формирование гофра в части, включающей в себя заранее сформированную линию сгиба, которую легче изготавливать.
[0006] В соответствии с одним вариантом осуществления изобретение предлагает гибочную систему для формирования гофра в части, предназначенной для изготовления уплотнительной мембраны для резервуара для хранения текучей среды, при этом упомянутая часть имеет заранее сформированную линию сгиба, перпендикулярную гофру, подлежащему формированию, причём гибочная система включает в себя:
– верхнюю раму и нижнюю раму, выполненные с возможностью перемещения в вертикальном направлении относительно друг друга между исходным положением и положением гибки;
– по меньшей мере один пуансон, удерживаемый верхней рамой и предназначенный для надавливания на часть для того, чтобы формировать гофр, во время относительного перемещения между верхней рамой и нижней рамой из исходного положения в положение гибки;
– по меньшей мере две нижние подштамповые подушки, перемещаемые удерживаемые нижней рамой, и две верхние подштамповые подушки, удерживаемые верхней рамой и расположенные в поперечном направлении с соответственных противоположных сторон от пуансона, каждая верхняя подштамповая подушка включает в себя прижимную поверхность, а каждая нижняя подштамповая подушка включает в себя по меньшей мере одну опорную поверхность, обращённую к прижимной поверхности одной из верхних подштамповых подушек и параллельную ей, так, что в промежуточном положении прижима прижимные поверхности верхних подштамповых подушек прижимают часть к опорным поверхностям нижних подштамповых подушек, каждая верхняя подштамповая подушка установлена на верхней раме с возможностью перемещения в направлении, перпендикулярном прижимной поверхности упомянутой верхней подштамповой подушки, таким образом, что упомянутая верхняя подштамповая подушка перемещается относительно верхней рамы в упомянутом направлении, перпендикулярном прижимной поверхности, как только, во время относительного перемещения из исходного положения в положение гибки, упомянутая верхняя подштамповая подушка достигает промежуточного положения прижима;
– причем гибочная система дополнительно включает в себя устройство для деформации заранее сформированной линии сгиба, включающее в себя:
– центральный палец, предназначенный для расположения напротив пересечения между заранее сформированной линией сгиба и гофром, подлежащим формированию, при этом центральный палец удерживается нижней рамой; и
– два пальца, предназначенных для деформации заранее сформированной линии сгиба, расположенных в поперечном направлении с соответственных противоположных сторон от центрального пальца, причём два пальца установлены на опоре для пальцев, опора для пальцев кинематически соединена с верхней рамой и с верхними подштамповыми подушками механизмом шарнирного соединения, который выполнен с возможностью формирования редуктора, обеспечивающего уменьшение вертикального перемещения опоры для пальцев относительно относительного вертикального перемещения между верхней рамой и нижней рамой, когда, во время относительного перемещения между верхней рамой и нижней рамой из исходного положения в положение гибки, верхние подштамповые подушки находятся в промежуточном положении прижима.
[0007] Вследствие этого гибочная система этого типа является более простой, в частности, в том, что благодаря её устройству для деформации заранее сформированной линии сгиба нет необходимости использовать пуансоны сложной формы для управления деформацией гофра в зоне, близкой к заранее сформированной линии сгиба. Кроме того, благодаря механизму шарнирного соединения устройства для деформации заранее сформированной линии сгиба больше нет необходимости использовать специализированные приводы для декорреляции вертикального перемещения пальцев и вертикального перемещения верхней рамы.
[0008] Согласно другим предпочтительным вариантам осуществления этот тип гибочной системы может иметь один или более следующих признаков.
[0009] В соответствии с одним вариантом осуществления механизм шарнирного соединения включает в себя по меньшей мере одну первую группу из четырёх звеньев, включающую в себя первое верхнее звено, шарнирно установленное на верхней раме вокруг первой геометрической оси, второе верхнее звено, шарнирно установленное на верхней раме вокруг второй геометрической оси, первое нижнее звено, шарнирно установленное на одной из верхних подштамповых подушек вокруг третьей геометрической оси, и второе нижнее звено, шарнирно установленное на другой из верхних подштамповых подушек вокруг четвертой геометрической оси, причем первое верхнее звено и первое нижнее звено шарнирно соединены друг с другом вокруг пятой геометрической оси, второе верхнее звено и второе нижнее звено шарнирно соединены друг с другом вокруг шестой геометрической оси, первая, вторая, третья, четвертая, пятая и шестая геометрические оси параллельны горизонтальному направлению, перпендикулярному заранее сформированной линии сгиба, причем опора для пальцев соединена, с одной стороны, с первым верхним звеном и/или с первым нижним звеном посредством первого скользящего соединения, а, с другой стороны, со вторым верхним звеном и/или вторым нижним звеном посредством второго скользящего соединения, при этом первое и второе скользящие соединения выполнены с возможностью поддержания опоры для пальцев в вертикальном направлении.
[0010] Вследствие этого первое и второе скользящие соединения обеспечивают шарнирное соединение первой группы звеньев во время относительного перемещения между верхней рамой и нижней рамой из исходного положения в положение гибки, пока верхние подштамповые подушки находятся в промежуточном положении прижима.
[0011] В соответствии с одним вариантом осуществления гибочная система включает в себя второй пуансон, удерживаемый верхней рамой.
[0012] В соответствии с одним вариантом осуществления первое скользящее соединение включает в себя первый физический шпиндель, который соединён с первым верхним звеном и/или с первым нижним звеном, причём первый физический шпиндель установлен с возможностью скольжения в первой направляющей скольжения, сформированной в опоре для пальцев, а второе скользящее соединение включает в себя второй физический шпиндель, который соединён со вторым верхним звеном и/или вторым нижним звеном, причём второй физический шпиндель установлен с возможностью скольжения во второй направляющей скольжения, сформированной в опоре для пальцев.
[0013] В соответствии с одним вариантом осуществления первая направляющая скольжения и вторая направляющая скольжения протяжены горизонтально.
[0014] В соответствии с одним вариантом осуществления первый физический шпиндель протяжён вдоль пятой геометрической оси, а второй физический шпиндель протяжён вдоль шестой геометрической оси.
[0015] В соответствии с одним вариантом осуществления первая и вторая геометрические оси проходят в первой горизонтальной плоскости, третья и четвертая геометрические оси проходят во второй горизонтальной плоскости, пятая и шестая геометрические оси проходят в третьей горизонтальной плоскости, расположенной вертикально между первой горизонтальной плоскостью и второй горизонтальной плоскостью.
[0016] В соответствии с одним вариантом осуществления два пальца установлены с возможностью скольжения в поперечном направлении на опоре для пальцев. В соответствии с одним вариантом осуществления два пальца установлены с возможностью скольжения между положением в отдалении друг от друга и положением близко друг к другу. В соответствии с одним вариантом осуществления два пальца поджимаются по направлению к их положению в отдалении друг от друга одним или более возвратными элементами.
[0017] В соответствии с одним вариантом осуществления пальцы имеют конец сферической формы.
[0018] В соответствии с одним вариантом осуществления пальцы прикреплены с возможностью съёма к опоре для пальцев.
[0019] В соответствии с одним вариантом осуществления механизм шарнирного соединения прикреплён с возможностью съёма к верхней раме, к верхней подштамповой подушке и к опоре для пальцев.
[0020] В соответствии с одним вариантом осуществления центральный палец имеет конец сферической формы.
[0021] В соответствии с одним вариантом осуществления центральный палец прикреплен с возможностью съёма к нижней раме.
[0022] В соответствии с одним вариантом осуществления часть, в которой должен быть сформирован гофр, представляет собой угловую часть, включающую в себя первый фланец и второй фланец, которые наклонены относительно друг друга под углом α от 1° до 179° включительно,
– каждая из двух нижних подштамповых подушек включает в себя первую и вторую опорные поверхности, которые наклонены относительно друг друга под углом α и соответственно предназначены для приёма первого фланца и второго фланца угловой части, причём упомянутые нижние подштамповые подушки установлены с возможностью скольжения на нижней раме в поперечном направлении между положением близко друг к другу и положением в отделении друг от друга.
[0023] В соответствии с одним вариантом осуществления каждая из нижних подштамповых подушек включает в себя основание, с помощью которого упомянутая нижняя подштамповая подушка установлена с возможностью скольжения на нижней раме в поперечном направлении, причем первая и вторая опорные поверхности каждой из нижних подштамповых подушек установлены с возможностью съёма на упомянутом основании.
[0024] В соответствии с одним вариантом осуществления пуансон и две верхние подштамповые подушки являются частью первого подвижного узла, установленного на верхней раме и расположенного напротив первых опорных поверхностей нижних подштамповых подушек, при этом упомянутый пуансон предназначен для формирования участка гофра в первом фланце угловой части, причем первый подвижный узел дополнительно включает в себя опору, к которой прикреплён пуансон, гибочная система дополнительно включает в себя второй подвижный узел, расположенный напротив вторых опорных поверхностей нижних подштамповых подушек, второй подвижный узел включает в себя опору, пуансон, прикрепленный к упомянутой опоре и предназначенный для формирования участка гофра во втором фланце угловой части, и две верхние подштамповые подушки, расположенные в поперечном направлении с соответственных противоположных сторон от упомянутого пуансона,
– каждая верхняя подштамповая подушка включает в себя основную конструкцию и прижимную пластину, которая имеет прижимную поверхность, расположенную напротив неё, параллельную одной из первых и вторых опорных поверхностей нижних подштамповых подушек, причём упомянутая прижимная пластина установлена с возможностью скольжения в поперечном направлении на упомянутой верхней подштамповой подушке, каждая верхняя подштамповая подушка установлена на опоре упомянутого первого или второго подвижного узла с возможностью перемещения в направлении, перпендикулярном прижимной поверхности упомянутой верхней подштамповой подушки,
опора каждого из первого и второго подвижных узлов установлена на верхней раме с возможностью перемещения в направлении, параллельном продольному направлению пуансона упомянутого первого или второго подвижного узла.
[0025] В соответствии с одним вариантом осуществления механизм шарнирного соединения включает в себя вторую группу из четырёх звеньев, которая симметрична первой группе из четырёх звеньев относительно поперечной плоскости, причём первая и вторая группы из четырёх звеньев соответственно шарнирно установлены на верхних подштамповых подушках первого и второго подвижных узлов.
[0026] В соответствии с одним вариантом осуществления каждый из первого и второго подвижных узлов включает в себя кулачковую поверхность, выполненную с возможностью взаимодействия с кулачковым следящим элементом, установленным на нижней раме, во время относительного перемещения между верхней рамой и нижней рамой из исходного положения в положение гибки, причем кулачковая поверхность и кулачковый следящий элемент выполнены так, что опора упомянутого первого или второго подвижного узла скользит по нижней раме таким образом, чтобы обеспечивать перемещение опоры упомянутого первого или второго подвижного узла в направлении, перпендикулярном прижимным поверхностям верхних подштамповых подушек упомянутого первого или второго подвижного узла, во время относительного перемещения между верхней рамой и нижней рамой из исходного положения в положение гибки.
[0027] В соответствии с одним вариантом осуществления каждый первый или второй подвижный узел установлен с возможностью скольжения на промежуточном элементе, причем упомянутый промежуточный элемент прикреплен с возможностью съёма к верхнему клину, который прикреплен с возможностью съёма к верхней раме.
[0028] В соответствии с одним вариантом осуществления изобретение также предлагает способ использования вышеупомянутой гибочной системы, причём способ содержит этапы, на которых:
– располагают часть для опирания на опорные поверхности нижних подштамповых подушек и
– перемещают верхнюю раму и нижнюю раму относительно друг друга из исходного положения в положение гибки.
[0029] Некоторые аспекты изобретения проистекают из идеи предложения простой гибочной системы, не требующей конкретного приведения в действие устройства для деформация заранее сформированной линии сгиба. Некоторые аспекты изобретения проистекают из идеи предложения регулируемой гибочной системы, которая может быть легко адаптирована к формированию гофра в угловых частях, имеющих разные углы.
КРАТКОЕ ОПИСАНИЕ ФИГУР
[0030] Изобретение будет лучше понято, и его другие цели, подробности, признаки и преимущества станут более очевидными в ходе следующего описания особых вариантов осуществления изобретения, приведенных только в качестве неограничивающей иллюстрации со ссылкой на приложенные чертежи.
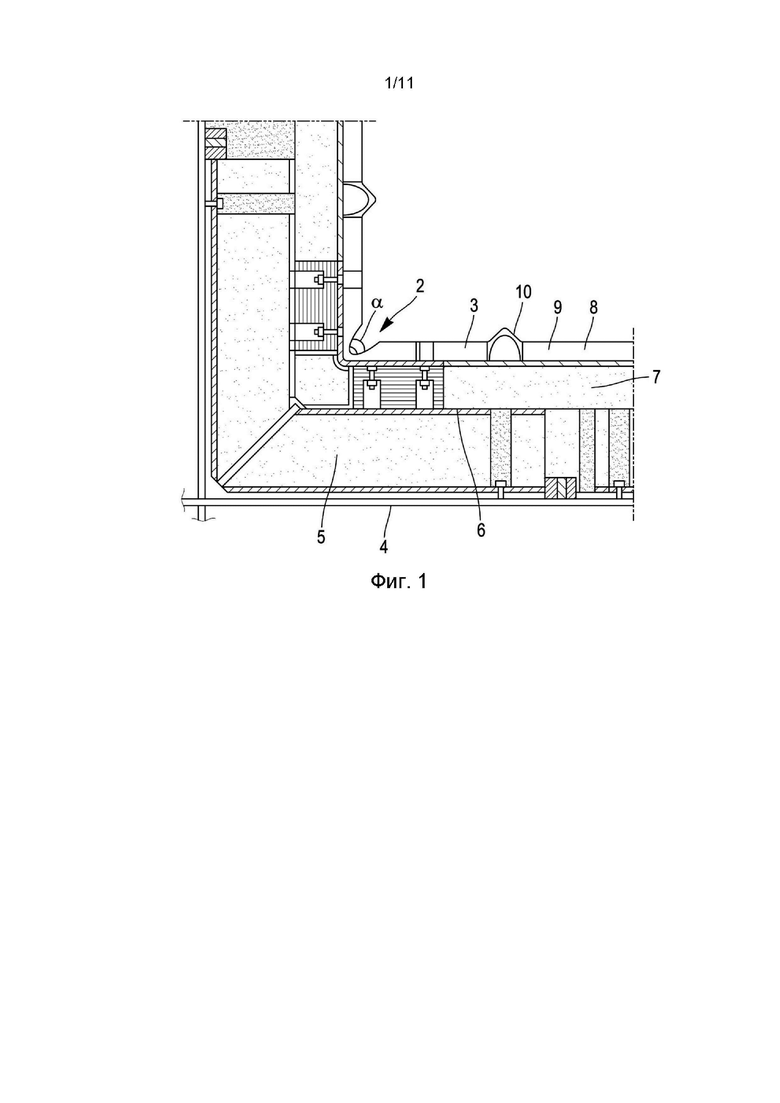
[0031] Фиг. 1 представляет местный вид в разрезе герметичного и теплоизолированного резервуара для хранения текучей среды в соответствии с одним вариантом осуществления в угловой зоне между двумя стенками.
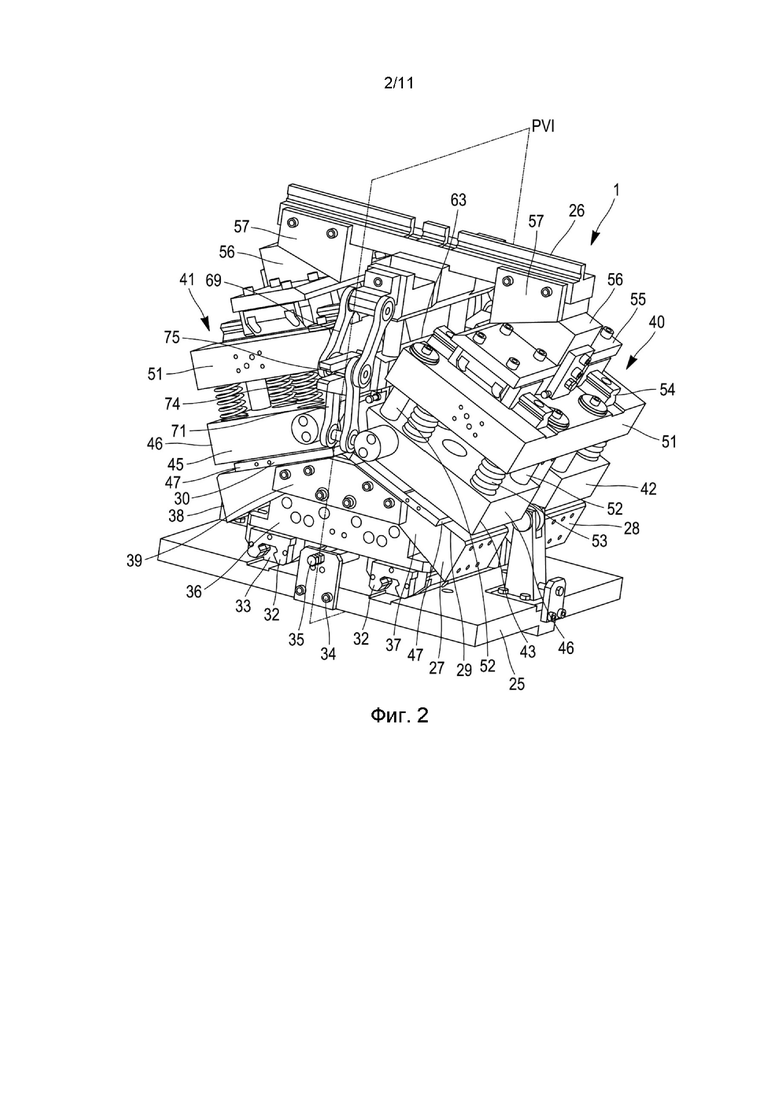
[0032] Фиг. 2 представляет вид в перспективе гибочной системы, предназначенной для формирования гофра в угловой части, в промежуточном положении, зажимающей угловую часть.
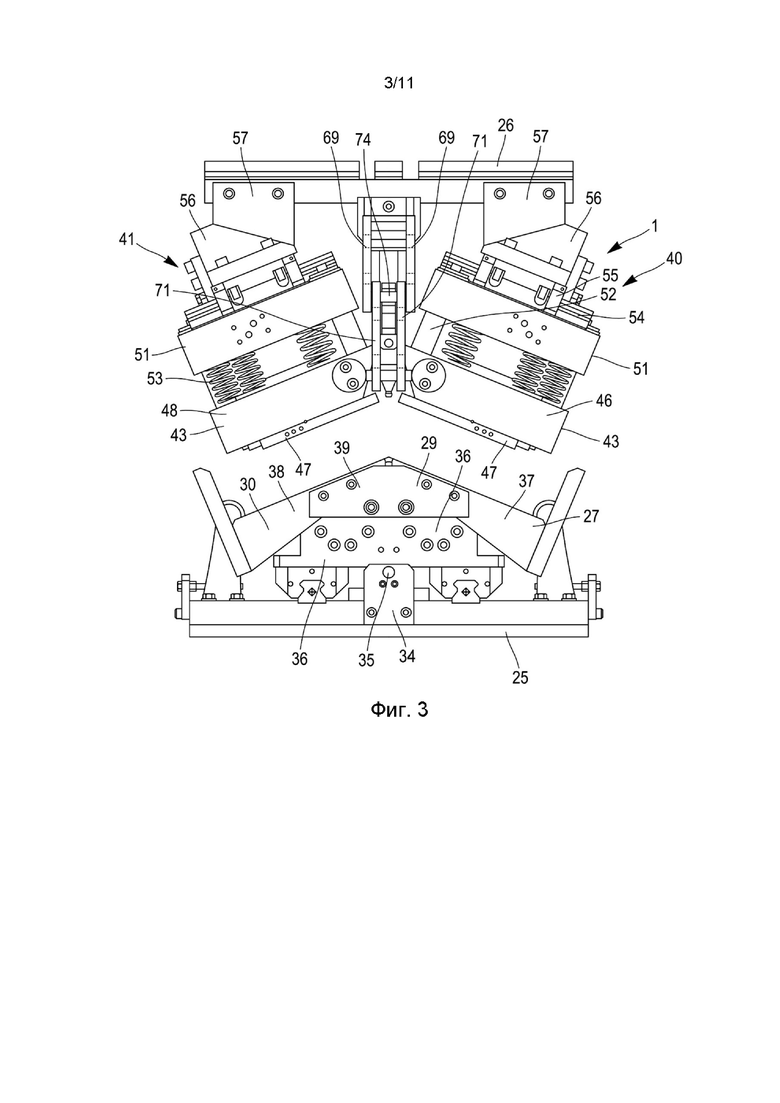
[0033] Фиг. 3 представляет вид сбоку гибочной системы на фиг. 2 в исходном положении.
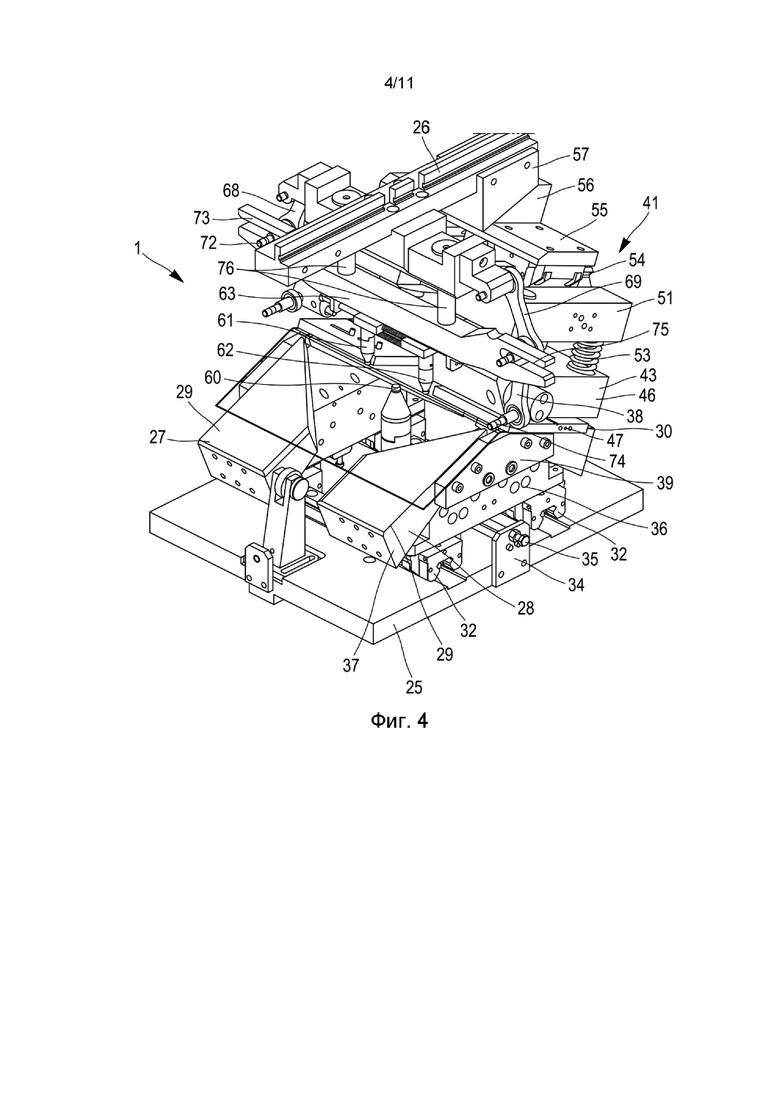
[0034] Фиг. 4 представляет вид в перспективе гибочной системы на фиг. 2 в промежуточном положении прижима.
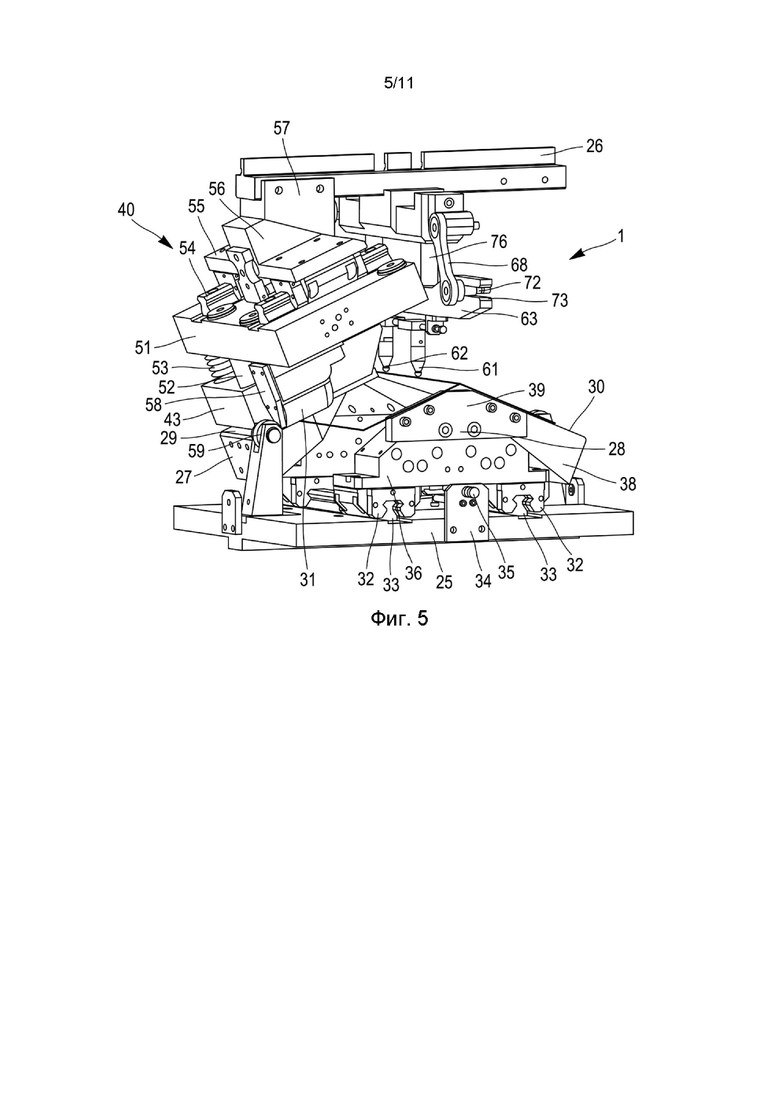
[0035] Фиг. 5 представляет другой вид в перспективе гибочной системы на фиг. 2 в промежуточном положении прижима.
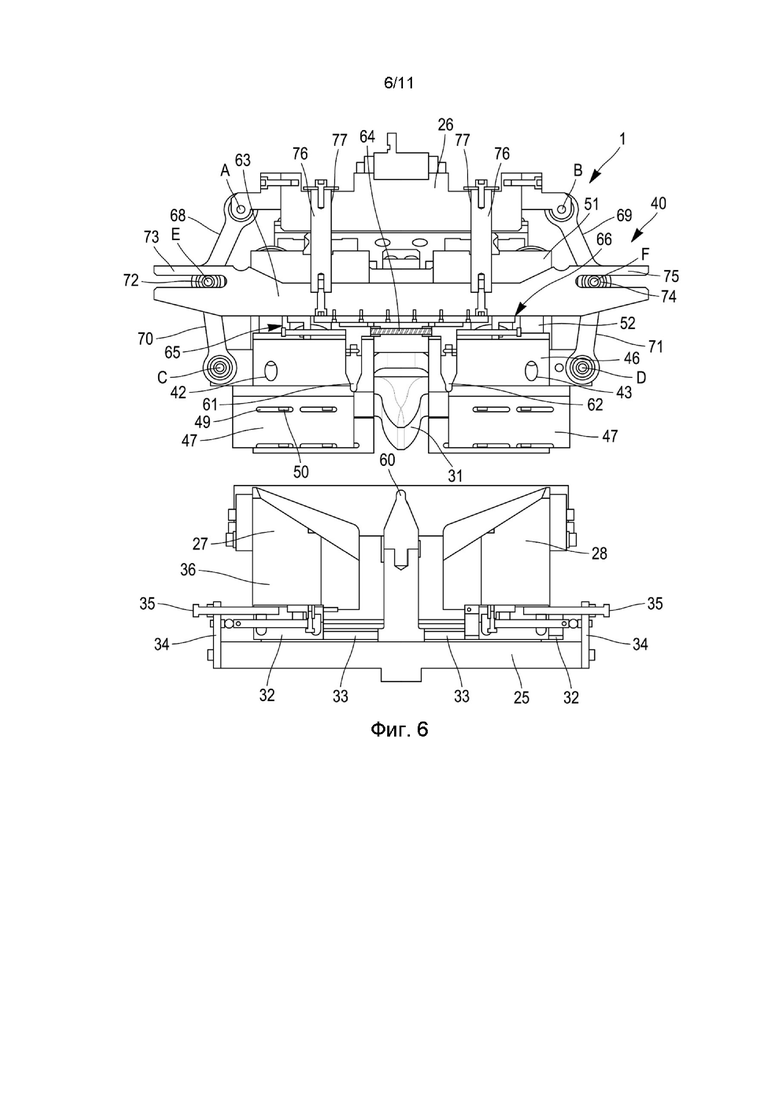
[0036] Фиг. 6 представляет вид гибочной системы на фиг. 2 в сечении по плоскости PVI.
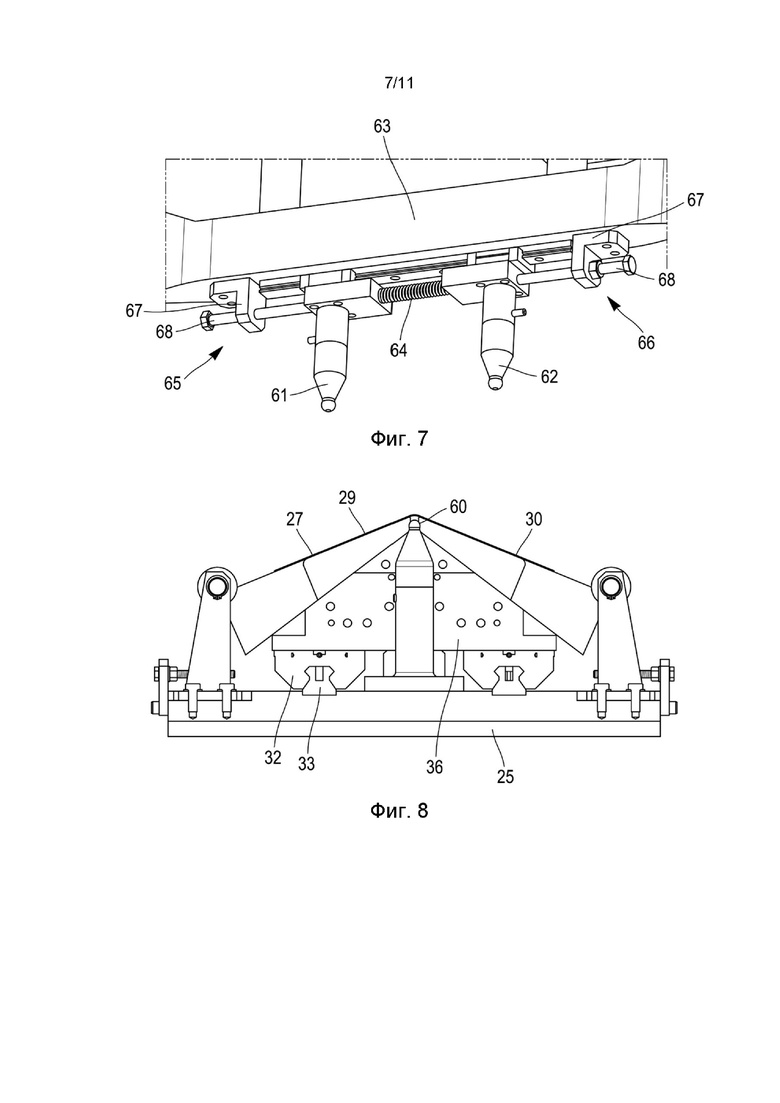
[0037] Фиг. 7 представляет подробный вид в перспективе, иллюстрирующий пальцы, предназначенные для деформации заранее сформированной линии сгиба в угловой части.
[0038] Фиг. 8 представляет подробный вид нижней рамы, в деталях иллюстрирующий центральный палец, предназначенный для деформации заранее сформированной линии сгиба угловой части.
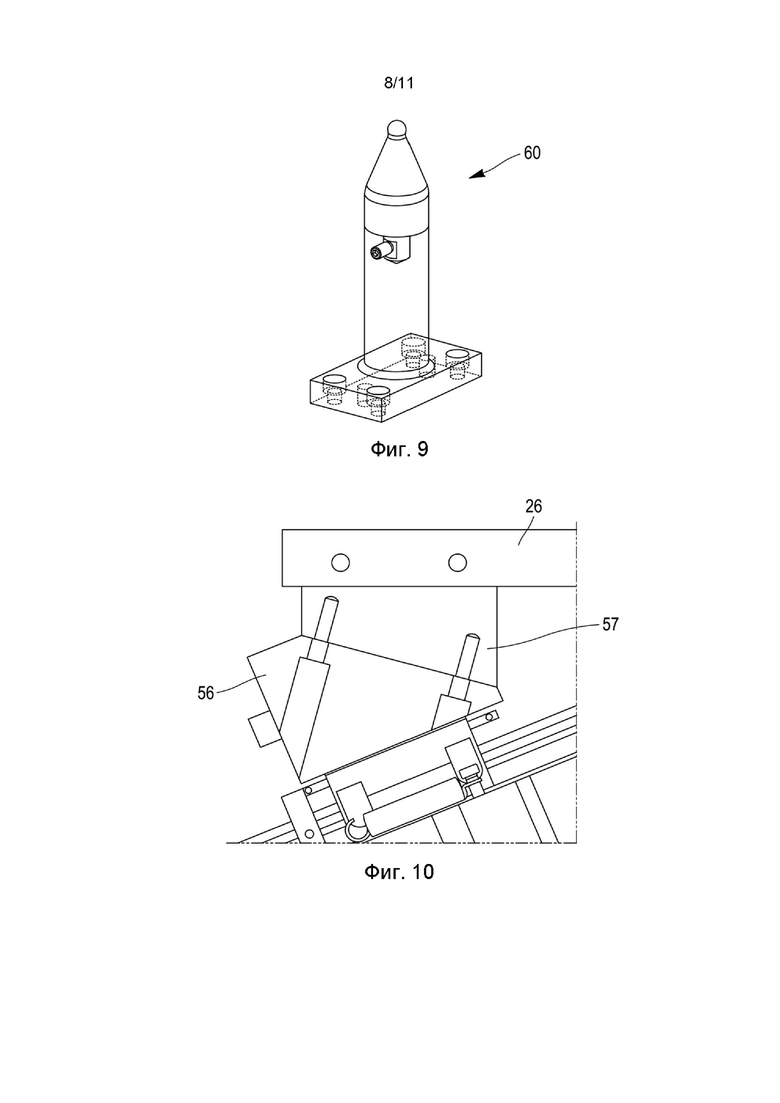
[0039] Фиг. 9 представляет собой подробный вид центрального пальца на фиг. 8.
[0040] Фиг. 10 представляет подробный вид крепления подвижного узла к верхней раме.
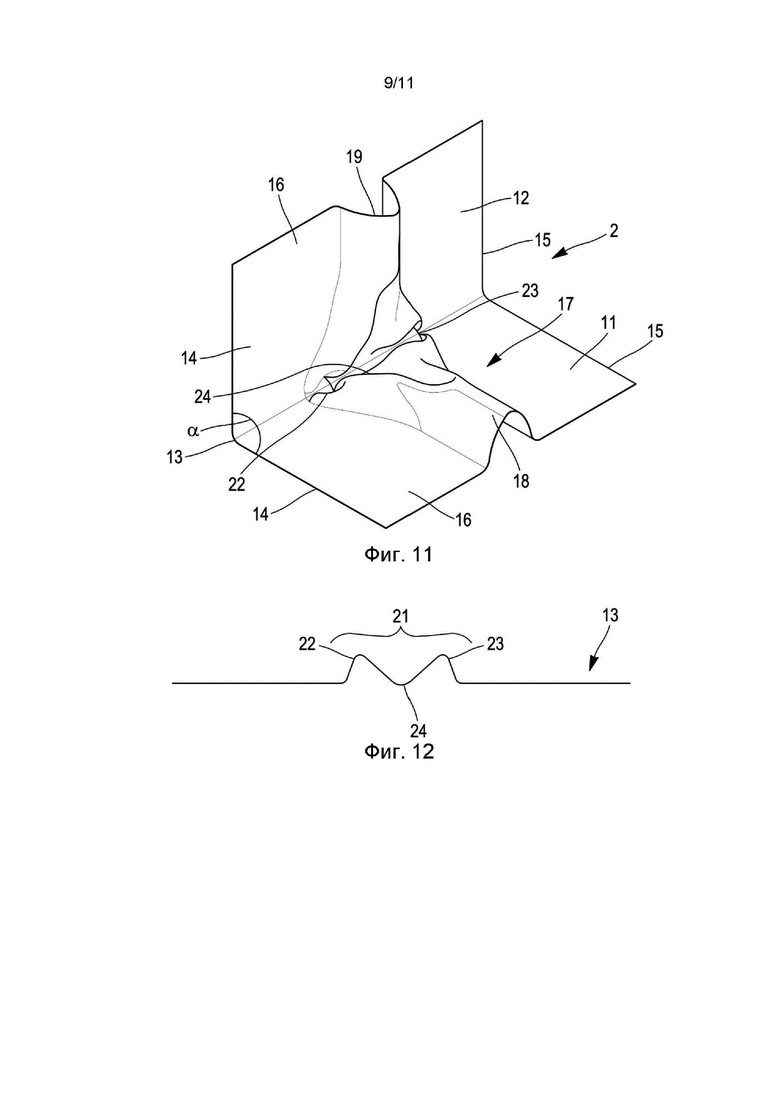
[0041] Фиг. 11 представляет вид в перспективе угловой части в соответствии с первым вариантом осуществления.
[0042] Фиг. 12 представляет схематический вид профиля линии сгиба между первым фланцем и вторым фланцем угловой части на фиг. 11.
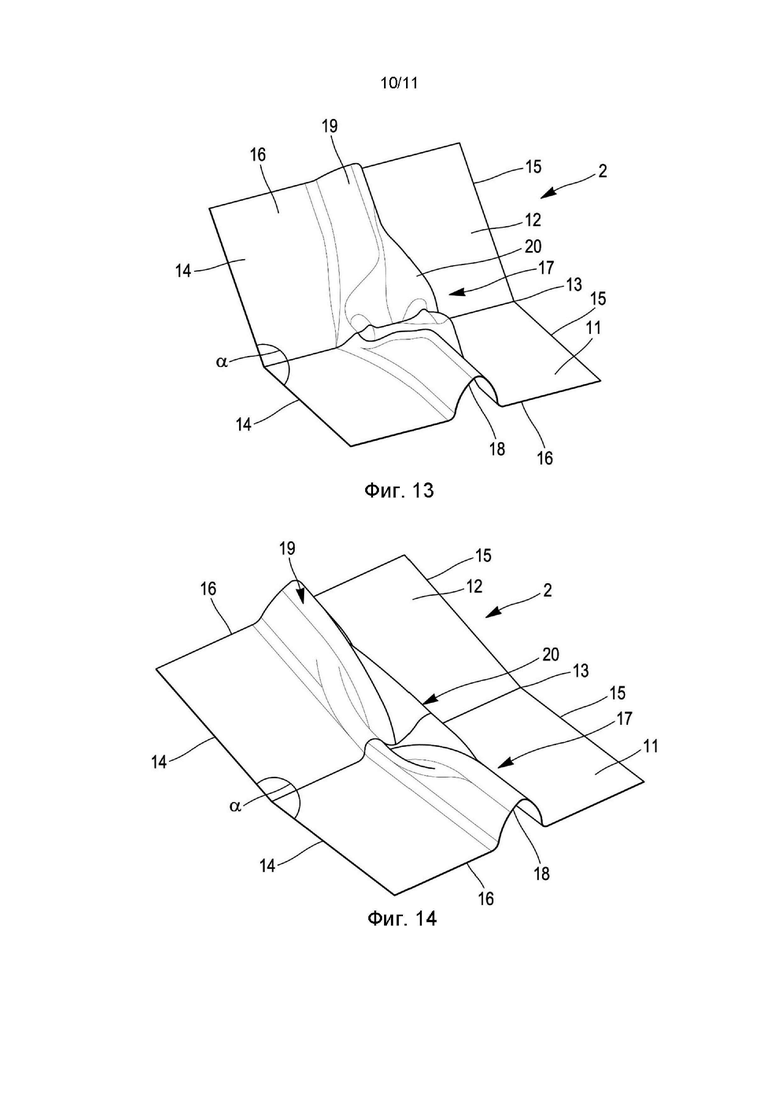
[0043] Фиг. 13 представляет собой вид в перспективе угловой части в соответствии со вторым вариантом осуществления.
[0044] Фиг. 14 представляет вид в перспективе угловой части в соответствии с третьим вариантом осуществления.
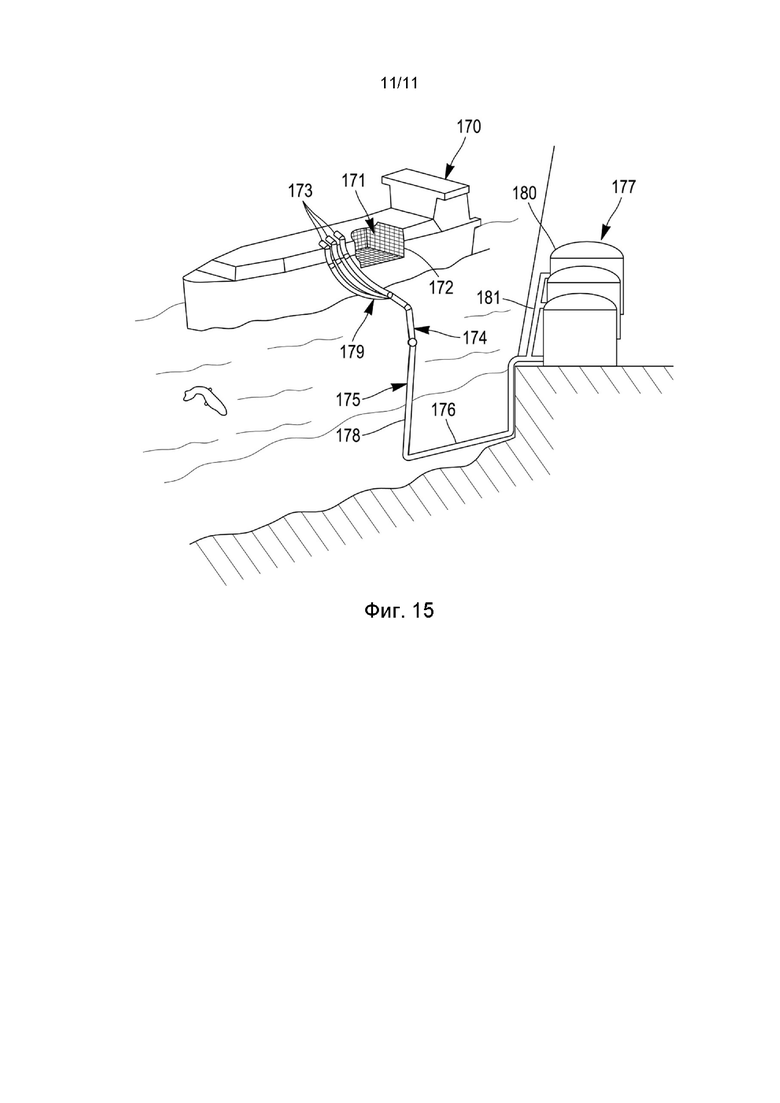
[0045] Фиг. 15 представляет схематический вид в разрезе резервуара танкера-метановоза и терминала для загрузки/разгрузки этого резервуара.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0046] Гибочная система 1, а также соответственный способ использования, который будет описан далее, предназначены для производства части, такой как угловая часть 2, для изготовления уплотнительной мембраны 3 герметичного и теплоизолированного резервуара для хранения сжиженного газа.
[0047] В качестве примера фиг. 1 иллюстрирует конструкцию герметичного и теплоизолированного резервуара, оборудованного угловой частью 2 этого типа, на уровне угла, сформированного между двумя стенками резервуара. Каждая стенка резервуара включает в себя, от внешней области до внутренней области резервуара, несущую конструкцию 4, вспомогательный теплоизолирующий барьер 5, включающий в себя блоки изоляции, удерживаемые на несущей конструкции 4 и прикрепленные к последней вспомогательными удерживающими элементами, вспомогательную уплотнительную мембрану 6, лежащую на блоках изоляции вспомогательного теплоизолирующего барьера 5, основной теплоизолирующий барьер 7, включающий в себя блоки изоляции, прикреплённые к вспомогательной герметизирующей мембране 6 основными удерживающими элементами, не показаны, и основную уплотнительную мембрану 3, лежащую на блоках изоляции основного теплоизолирующего барьера 7 и предназначенную находиться в контакте с сжиженным газом, содержащимся в резервуаре.
[0048] Основная уплотнительная мембрана 3 включает в себя множество гофрированных металлических пластин 8, приваренных друг к другу. Каждая металлическая пластина 8 включает в себя первый ряд параллельных так называемых низких гофров 9 и второй ряд параллельных так называемых высоких гофров 10. Гофры 9 первого ряда перпендикулярны гофрам 10 второго ряда. Здесь гофры 9, 10 выступают по направлению к внутренней области резервуара.
[0049] В угловой зоне, сформированной на пересечении между двумя смежными стенками резервуара, основная уплотнительная мембрана 3 включает в себя угловую часть 2.
[0050] Этот тип угловой части 2 подробно представлен на фиг. 11. Угловая часть 2 получена путём сгибания металлической пластины. Она предпочтительно изготовлена из материала, идентичного материалу металлических пластин 8. Металлическая пластина может, в частности, быть изготовлена из нержавеющей стали, алюминия, Invar®: другими словами, сплава железа и никеля, коэффициент расширения которого обычно составляет от 1,2 x 10-6 до 2 x 10-6 K-1, или из сплава железа с высоким содержанием марганца, коэффициент расширения которого составляет порядка 7 x 10-6 K-1. Однако в равной степени возможны другие металлы или сплавы. В качестве примера, металлическая пластина имеет толщину приблизительно 1,2 мм. В равной степени могут быть предусмотрены и другие толщины, учитывая, что утолщение металлической пластины приводит к увеличению её стоимости и, в общем, увеличивает жесткость угловой части 2.
[0051] Как представлено на фиг. 11, угловая часть 2 включает в себя первый фланец 11 и второй фланец 12, которые наклонены относительно друг друга и соединяются на уровне линии 13 сгиба или пересечения. Угол α, сформированный между первым фланцем 11 и вторым фланцем 12, составляет 90° в варианте осуществления, представленном на фиг. 11. Однако, говоря в общем, и в зависимости от геометрии резервуара, угол α может принимать любое значение от 1° до 179° включительно и, в частности, от 90° до 179° включительно. Каждый из первого и второго фланцев 11, 12 имеет общую форму прямоугольного параллелепипеда и в связи с этим включает в себя два параллельных боковых края 14, 15 и концевой край 16, противоположный другому из первого и второго фланцев 11, 12.
[0052] Угловая часть 2 включает в себя гофр 17, придающий ей гибкость, позволяющую ей деформироваться под воздействием тепловых и механических нагрузок, создаваемых сжиженным газом, хранящимся в резервуаре. Гофр 17 протяжён перпендикулярно линии 13 сгиба от одного конца угловой части 2 до другого. В связи с этим гофр 17 позволяет угловой части 2 деформироваться в поперечном направлении, параллельном линии 13 сгиба. Гофр 17 выступает по направлению к внутренней области выступающего угла α, сформированного между первым и вторым фланцами 11, 12 угловой части 2. В связи с этим гофр 17 выступает по направлению к внутренней области резервуара, когда угловая часть 2 размещена в требуемом положении в резервуаре.
[0053] Как представлено на фиг. 1, угловая часть 2 расположена так, что её гофр 17 расположен на одной линии с одним из гофров 9 смежных металлических пластин 8 одной и другой из стенок. Угловая часть 2 соединена сваркой со смежными металлическими пластинами 8 для того, чтобы обеспечивать непрерывное уплотнение на уровне угловой зоны.
[0054] Возвращаясь к фиг. 11, можно увидеть, что гофр 17 разделён на три участка, а именно первый участок 18, сформированный в первом фланце 11 и параллельный его боковым краям 14, 15, второй участок 19, сформированный во втором фланце 12 и параллельный его боковым краям 14, 15, и центральный участок 20, расположенный между первым участком 18 и вторым участком 19, другими словами, по обе стороны от первого фланца 11 и второго фланца 12 и, следовательно, включающий в себя линию 13 сгиба между первым фланцем 11 и вторым фланцем 12.
[0055] Первый участок 18 протяжён от концевого края 16 первого фланца 11 в направлении линии 13 сгиба. Аналогично второй участок 19 протяжён от концевого края 16 второго фланца 12 в направлении линии 13 сгиба. Первый участок 18 и второй участок 19 выступают по направлению к внутренней области выступающего угла α, сформированного между первым и вторым фланцами 11, 12. Первый участок 18 и второй участок 19 имеют профиль по существу треугольной или полуэллиптической формы.
[0056] Фиг. 12 представляет профиль линии 13 сгиба между первым фланцем 11 и вторым фланцем 12. Профиль включает в себя деформированную зону 21, имеющую общую форму перевёрнутой буквы W. Деформированная зона 21 симметрична относительно пересечения между линией 13 сгиба и осью первого и второго участков 18, 19 гофра 17. Деформированная зона 21 имеет два выпуклых выступа 22, 23, продолжающихся по направлению к внутренней области выступающего угла, сформированного между первым фланцем 11 и вторым фланцем 12, и отделённых друг от друга вогнутым углублением 24. Нижняя часть вогнутого углубления 24 предпочтительно расположена в по существу той же плоскости, что и прямолинейный участок линии 13 сгиба за пределами деформированной зоны 21.
[0057] Нижний конец вогнутого углубления 24 имеет форму дуги, например, круговой дуги или эллиптической дуги.
[0058] Кроме того, как представлено на фиг. 11, вогнутое углубление 24 протяжено по всему центральному участку 20 гофра 17. Глубина, а также ширина вогнутого углубления 24 уменьшаются от линии 13 сгиба в направлении одного и другого из первого и второго участков 18, 19. Вогнутое углубление 24 соединяется с вершиной первого и второго участков 18, 19, и инверсия вогнутости возникает в стыке между вогнутым углублением 24 и каждым из первого и второго участков 18, 19.
[0059] Два выпуклых выступа 22, 23 также протяжены по всему центральному участку 20 гофра 17. Высота двух выпуклых выступов 22, 23 увеличивается от линии 13 сгиба в направлении одного и другого из первого и второго участков 18, 19 по мере того, как расстояние между ними уменьшается.
[0060] Этот тип конфигурации первого и второго участков 18, 19 и центрального участка 20 получается исключительно путём гибки и, следовательно, имеет конфигурацию, которая может быть сформирована плоской. Другими словами, геометрия угловой части 2 такова, что она может быть произведена путём операции формирования формы, которая не приводит к какому-либо изменению длины материала металлической пластины или изменениям толщины металлической пластины, которые могли бы локально ухудшать механические свойства угловой части 2.
[0061] Фигуры 13 и 14 иллюстрируют угловые части 2 в соответствии с двумя другими вариантами осуществления. Угловые части на фигурах 13 и 14 отличаются от угловой части 2, описанной выше со ссылкой на фиг. 11, только тем, что угол α, сформированный между первым и вторым фланцами 11, 12 угловой части 2, составляет соответственно приблизительно 105° и 165°.
[0062] Гибочная система 1, обеспечивающая формирование угловой части 2, описанная выше, и способ использования этого типа гибочной системы 1 будут далее описаны со ссылкой на фигуры 2-10. Обычно «продольная» ориентация гибочной системы 1 соответствует проекции в горизонтальной плоскости осей первого и второго участков 18, 19 гофров 17, подлежащих формированию, а «поперечная» ориентация направлена поперечно упомянутому продольному направлению.
[0063] Первоначально металлическую пластину предварительно сгибают так, чтобы сформировать первый и второй фланцы 11, 12, наклонённые относительно друг друга. После этого в угловой части 2 образуют гофр 17 посредством гибочной системы 1, как описано далее.
[0064] Гибочная система 1 включает в себя нижнюю раму 25 и верхнюю раму 26, установленную с возможностью перемещения в вертикальном направлении относительно нижней рамы 25. Верхняя рама 26 выполнена с возможностью перемещения между исходным положением и положением гибки, в котором угловую часть 2 деформируют для того, чтобы сформировать гофр 17. Вследствие этого верхняя рама 26 способна прикладывать к угловой части 2 давление, обеспечивающее гибку угловой части 2 и формирование гофра 17. Верхняя рама 26 показана в её исходном положении на фигурах 3 и 6. Верхняя рама 26 также представлена на фигурах 2, 4 и 5 в промежуточном положении прижима, в котором угловая часть 2, подлежащая гибке, захвачена между нижними подштамповыми подушками 27, 28 и верхними подштамповыми подушками 42, 43, 44, 45, описанными далее.
[0065] Нижняя рама 25 включает в себя две нижние подштамповые подушки 27, 28, которые расположены с соответственных противоположных сторон от средней продольной вертикальной плоскости. Каждая из двух нижних подштамповых подушек 27, 28 имеет первую и вторую опорные поверхности 29, 30, которые наклонены относительно друг друга под углом, соответствующим углу α, сформированному между первым и вторым фланцами 11, 12 угловой части 2. Первая и вторая опорные поверхности 29, 30 наклонены так, что внутренняя область угловой части 2 направлена вниз в направлении нижней рамы 25. Другими словами, первая и вторая опорные поверхности 29, 30 каждой из двух нижних подштамповых подушек 27, 28 соответственно предназначены для приёма внутренней поверхности первого и второго фланцев 11, 12 угловой части 2. Две нижние подштамповые подушки 27, 28 разнесены друг от друга в поперечном направлении таким образом, чтобы позволять пуансонам 31, описанным далее, размещаться между двумя нижними подштамповыми подушками 27, 28 во время перемещения верхней рамы 26 из исходного положения в положение гибки.
[0066] Каждая из двух нижних подштамповых подушек 27, 28 установлена с возможностью скольжения на нижней раме 25 в поперечном горизонтальном направлении между отдалённом друг от друга положении, представленном на фиг. 4, и положением близко друг к другу, не представленном. С этой целью, как представлено, например, на фиг. 5, каждая нижняя подштамповая подушка 27, 28 включает в себя две каретки 32, каждая из которых установлена с возможностью скольжения на связанной рельсовой направляющей 33, удерживаемой нижней рамой 25. Возвратные элементы, такие как пружины или газовые цилиндры, не представлены, подживают две нижние подштамповые подушки 27, 28 по направлению к их положению в отдалении друг от друга.
[0067] Нижняя рама 25 включает в себя упорные элементы, обеспечивающие ограничение хода нижних подштамповых подушек 27, 28 относительно нижней рамы 25, и в связи с этим позволяет определять положение в отдалении друг от друга упомянутых нижних подштамповых подушек 27, 28 относительно нижней рамы 25. Как показано, например, на фиг. 6, каждый упорный элемент включает в себя фланец 34, который прикреплён к нижней раме 25 вдоль одного из краёв нижней рамы 25 и включает в себя резьбовое отверстие, в котором расположен резьбовой винт 35, который протяжён в поперечном направлении. Конец резьбового винта 35 образует упорную поверхность, с которой вступает в контакт комплементарная упорная поверхность одной из нижних подштамповых подушек 27, 28, когда последние находятся в их положении в отдалении друг от друга.
[0068] Как представлено на фиг. 2, например, каждая нижняя подштамповая подушка 27, 28 предпочтительно включает в себя основание 36, с помощью которого упомянутая нижняя подштамповая подушка 27, 28 установлена с возможностью скольжения на нижней раме 25, и два клина 37, 38, которые соответственно образуют первую опорную поверхность 29 и вторую опорную поверхность 30 упомянутой нижней подштамповой подушки 27, 28 и которые установлены с возможностью съёма на основании 36. Здесь клинья 37, 38 установлены на основании 36 посредством железного уголка 39. Каждый из клиньев 37, 38 прикреплён к железному уголку 39, например, посредством крепёжных винтов, а упомянутый железный уголок 39 прикреплён к основанию 36, например, посредством крепёжных винтов. Форма железного уголка 39 изменяется в зависимости от угла α, сформированного между первым и вторым фланцами 11, 12 угловой части 2. Железные уголки 39 и клинья 37, 38 нижних подштамповых подушек 27, 28 в этом случае легко заменяются на другие железные уголки 39 и клинья 37, 38, адаптированные к гибке угловых частей 2, имеющих разные углы α.
[0069] Кроме того, гибочная система 1 включает в себя два подвижных узла 40, 41, которые могут быть видны на фиг. 2, например, и установлены с возможностью перемещения на верхней раме 26.
[0070] Первый подвижный узел 40 расположен напротив первых опорных поверхностей 29 нижних подштамповых подушек 27, 28, а второй подвижный узел 41 расположен напротив вторых опорных поверхностей 30 нижних подштамповых подушек 27, 28. Первый подвижный узел 40 включает в себя две верхние подштамповые подушки 42, 43, которые расположены параллельно и напротив одной и другой из первых опорных поверхностей 29 нижних подштамповых подушек 27, 28 и, таким образом, предназначены для прижима первого фланца 11 угловой части 2 к первой опорной поверхности 29 нижних подштамповых подушек 27, 28, когда верхние подштамповые подушки 42, 43 находятся в промежуточном положении прижима. Аналогичным образом второй подвижный узел 41 включает в себя две верхние подштамповые подушки 44, 45, которые расположены параллельно и напротив одной и другой из вторых опорных поверхностей 30 нижних подштамповых подушек 27, 28 таким образом, чтобы прижимать второй фланец 12 угловой части 2 ко вторым опорным поверхностям 30 нижних подштамповых подушек 27, 28, когда верхние подштамповые подушки 44, 45 находятся в промежуточном положении прижима.
[0071] Если говорить конкретно, то каждая из верхних подштамповых подушек 42, 43, 44, 45 включает в себя основную конструкцию 46 и прижимную пластину 47, которая имеет прижимную поверхность, предназначенную вступать в контакт с угловой частью 2. Каждая прижимная пластина 47 установлена с возможностью скольжения на соответственной основной конструкции 48, параллельной поперечному направлению. В связи с этим прижимные пластины 47 каждого из первого и второго подвижных узлов 40, 41 выполнены с возможностью перемещения между положением близко друг к другу и положением в отдалении друг от друга. С этой целью, как представлено на фиг. 6, прижимные пластины 47 включают в себя поперечные канавки 49, в которых скользят направляющие штыри 50, прикреплённые к основной конструкции 48. Возвратные элементы, такие как пружины, не представлены, толкают прижимные пластины 47 по направлению к их положению в отдалении друг от друга.
[0072] Нижние подштамповые подушки 27, 28 и прижимные пластины 47 верхних подштамповых подушек 42, 43, 44, 45 выполнены с возможностью перемещения в поперечном направлении, когда верхние подштамповые подушки 42, 43, 44, 45 находятся в промежуточном положении прижима, а пуансоны 31 деформируют угловую часть 2 для того, чтобы формировать гофр 17, нижние подштамповые подушки 27, 28 и прижимные пластины 47 в связи с этим перемещаются по направлению к их положению близко друг к другу за счёт воздействия растягивающих усилий, прикладываемых угловой частью 2, когда она изгибается. В связи с этим это исключает изменения толщины угловой части 2, когда она изгибается.
[0073] Каждый из первого и второго подвижных узлов 40, 41 включает в себя опору 51, которая оборудована пуансоном 31, показанным на фиг. 5, расположенным в поперечном направлении между двумя верхними подштамповыми подушками 42, 43, 44, 45 упомянутого первого или второго подвижного узла 40, 41. Пуансоны 31 первого и второго подвижных узлов 40, 41 соответственно предназначены для формирования первого участка 18 и второго участка 19 гофра 17. Каждый пуансон 31 имеет сечение V-образной формы, соответствующее по существу треугольному или полуэллиптическому сечению первого участка 18 и второго участка 19 гофра 17, подлежащего формированию. Сечение V-образной формы пуансона 31 первого подвижного узла 40 проходит продольно в направлении, параллельном первой опорной поверхности 29 нижних подштамповых подушек 27, 28, тогда как сечение V-образной формы пуансона, не представлен, второго подвижного узла 41 проходит продольно в направлении, параллельном второй опорной поверхности 30 нижних подштамповых подушек 27, 28.
[0074] Каждая верхняя подштамповая подушка 42, 43, 44, 45 установлена на опоре 51 соответственного подвижного узла 40, 41 с возможностью перемещения в направлении, перпендикулярном прижимной поверхности прижимных пластин 47. Как представлено, например, на фиг. 2, перемещение верхних подштамповых подушек 42, 43, 44, 45 относительно опоры 51 производится посредством направляющего устройства, включающего в себя, для каждой верхней подштамповой подушки 42, 43, 44, 45, две направляющие трубки 52, прикрепленные к упомянутой верхней подштамповой подушке 42, 43, 44, 45 и ориентированные перпендикулярно прижимной поверхности упомянутой верхней подштамповой подушки 42, 43, 44, 45. Направляющие трубки 52 скользят внутри отверстий, сформированных в опоре 51. Кроме того, множество упругих элементов 53, таких как пружины сжатия или газовые цилиндры, например, имеют первый конец, упирающийся в верхнюю подштамповую подушку 42, 43, 44, 45, и второй конец, упирающийся в опору 51. Вследствие этого упругие элементы 53 прикладывают упругую силу, стремящуюся перемещать верхнюю подштамповую подушку 42, 43, 44, 45 и опору 51 в сторону друг от друга в направлении, перпендикулярном прижимной поверхности упомянутой верхней подштамповой подушки 42, 43, 44, 45. В представленном варианте осуществления первый конец каждого упругого элемента 53 размещён внутри несквозного отверстия, сформированного в верхней подштамповой подушке 42, 43, 44, 45, а второй конец размещен внутри несквозного отверстия, сформированного в опоре 51.
[0075] Опора 51 каждого из первого и второго подвижных узлов 40, 41 установлена с возможностью скольжения относительно верхней рамы 26 в направлении, параллельном продольному направлению пуансона 31 упомянутого первого или второго подвижного узла 40, 41. С этой целью в представленном варианте осуществления опора 51 каждого из подвижных узлов включает в себя рельсовые направляющие 54, каждая из которых установлена с возможностью скольжения внутри каретки 55, прикреплённой к верхней раме 26. В другом альтернативном варианте осуществления опора 51 каждого из первого и второго подвижных узлов 40, 41 включает в себя две каретки, каждая из которых установлена с возможностью скольжения на рельсовой направляющей, удерживаемой верхней рамой 26.
[0076] В представленном предпочтительном варианте осуществления опора 51 каждого из первого и второго подвижных узлов 40, 41 установлена с возможностью скольжения на промежуточном элементе 56. Другими словами, в представленном варианте осуществления каретки 55 каждого первого или второго подвижного узла 40, 41 прикреплены к одному из промежуточных элементов 56. Каждый из промежуточных элементов 56 прикреплён к верхней раме 26 посредством съёмного верхнего клина 57, представленного подробным образом на фиг. 10. Верхний клин 57, с одной стороны, прикреплён к верхней раме 26 с помощью крепёжных элементов, а, с другой стороны, прикреплён к одному из промежуточных элементов 56 с помощью крепёжных элементов. За счёт замены верхнего клина 57 на другой верхний клин, имеющий другой угол, наклон пуансонов 31 и прижимных поверхностей верхних подштамповых подушек 42, 43, 44, 45 может в связи с этим легко адаптироваться к гибке угловых частей 2, имеющих разные углы α.
[0077] Кроме того, каждый из первого и второго подвижных узлов 40, 41 включает в себя кулачковую поверхность 58, представленную на фиг. 5, выполненную с возможностью взаимодействия с кулачковый следящим элементом 59, установленным на нижней раме 25, когда верхняя рама 26 перемещается из ее исходного положения в ее положение гибки. Здесь кулачковый следящий элемент 59 представляет собой поддерживающий ролик с горизонтальной осью, проходящей в поперечном направлении. Кроме того, в варианте осуществления, представленном на фиг. 5, кулачковая поверхность 58 сделана на конце пуансона 31. Кулачковая поверхность 58 представляет собой поверхность, перпендикулярную прижимной поверхности верхних подштамповых подушек 42, 43, 44, 45 упомянутого первого или второго подвижного узла 40, 41. Благодаря установке с возможностью скольжения упомянутого первого или второго подвижного узла 40, 41 на верхней раме 26 и взаимодействия между кулачковой поверхностью 58 и кулачковый следящим элементом 59 опора 51 и, следовательно, пуансон 31 каждого первого или второго подвижного узла 40, 41 вследствие этого перемещаются в направлении, перпендикулярном прижимным поверхностям верхних подштамповых подушек 42, 43, 44, 45 упомянутого подвижного узла 40, 41, другими словами, в направлении, перпендикулярном фланцу 11, 12 противоположной угловой части 2, тогда как верхняя рама 26 перемещается в вертикальном направлении из её исходного положения в ее положение гибки.
[0078] Кроме того, гибочная система 1 дополнительно включает в себя устройство для деформации линии сгиба между первым фланцем 11 и вторым фланцем 12 угловой части 2.
[0079] Устройство для деформации линии сгиба включает в себя центральный палец 60 и два пальца 61, 62, показанные, в частности, на фиг. 4. Два пальца 61 и 62 расположены в поперечном направлении с соответственных противоположных сторон от центрального пальца 60. Устройство для деформации линии сгиба стремится деформировать зону линии 13 сгиба для того, чтобы придавать ей W-образную общую форму, описанную выше со ссылкой на фиг. 12. Как представлено, например, на фиг. 6, центральный палец 60 прикреплён к нижней раме 25 и выступает вверх в направлении верхней рамы 26. Центральный палец 60 расположен таким образом, чтобы располагаться напротив пересечения между линией 13 сгиба и осями первого и второго участков 18, 19 гофра 17. Как представлено, например, на фиг. 4, центральный палец 60 находится на одном уровне с линией 13 сгиба угловой части 2, когда угловая часть 2 лежит на нижних подштамповых подушках 27, 28. Пальцы 61, 62 расположены в той же поперечной плоскости, что и центральный палец 60, с соответственных противоположных сторон от последнего. Пальцы 61, 62 удерживаются верхней рамой 26.
[0080] Два пальца 61, 62 предназначены для деформации линии 13 сгиба для того, чтобы сформировать два выпуклых выступа 22, 23 деформированной зоны 21 W-образной формы, тогда как центральный палец 60 стремится сформировать вогнутое углубление 24.
[0081] Как показано на фиг. 7, два пальца 61, 62 установлены с возможностью скольжения на опоре 63 для пальцев, и расстояние между этими пальцами 61, 62 можно регулировать по необходимости путём перемещения их ближе друг к другу или дальше друг от друга. Два пальца 61, 62, в частности, установлены с возможностью скольжения в горизонтальном поперечном направлении между положением в отдалении друг от друга, представленном на фиг. 7, и положением близко друг к другу, не представленном. С этой целью, как представлено на фиг. 7, каждый палец 61, 62 прикреплён к каретке, которая установлена на рельсовой направляющей, прикреплённой к опоре 63 для пальцев. Возвратный элемент 64, здесь винтовая пружина, толкает два пальца 61, 62 по направлению к их положению в отдалении друг от друга. Кроме того, опора 63 для пальцев включает в себя упорные элементы 65, 66, обеспечивающие ограничение поперечного хода пальцев 61, 62 и в связи с этим обеспечивающие определение положения в отдалении друг от друга упомянутых пальцев 61, 62. С этой целью, как представлено на фиг. 7, каждый из упорных элементов 65, 66 включает в себя фланец 67, который прикреплён к опоре 63 для пальцев. Резьбовой винт 68, протяжённый в поперечном направлении, установлен в отверстии, сформированном в каждом из фланцев 67. Один из концов каждого из резьбовых винтов образует упорную поверхность, с которой вступает в контакт каретка, на которой закреплён один из пальцев 61, 62, когда он находится в его положении в отдалении друг от друга.
[0082] Кроме того, опора 63 для пальцев кинематически соединена с верхней рамой 26 и с верхними подштамповыми подушками 42, 43, 44, 45 механизмом шарнирного соединения, например, как показано на фигурах 2 и 6. Механизм шарнирного соединения включает в себя, по меньшей мере, одну первую группу из четырёх звеньев, а именно первое и второе верхние звенья 68, 69 и первое и второе нижние звенья 70, 71. При этом, как показано, например, на фиг. 2, механизм шарнирного соединения предпочтительно включает в себя первую и вторую группы из четырёх звеньев, идентичных друг другу, что означает, что каждое из четырёх звеньев одной из групп параллельно одному из четырёх звеньев другой группы и имеет идентичные ему геометрические оси шарнирного сочленения. Две группы из четырёх звеньев соответственно расположены с соответственных противоположных сторон от поперечной средней плоскости и, таким образом, позволяют обеспечивать симметрию сил.
[0083] Поскольку две группы из четырёх звеньев идентичны, только одна из двух групп описана ниже. Возвращаясь к фиг. 6, можно увидеть, что первое и второе верхние звенья 68, 69 соответственно шарнирно установлены на верхней раме 26 вокруг первой геометрической оси A и второй геометрической оси B. Первое и второе нижние звенья 70, 71 соответственно шарнирно установлены на одной и другой из двух верхних подштамповых подушек 42, 43 одного и того же подвижного узла, здесь первого подвижного узла 40, вокруг третьей геометрической оси C и четвертой геометрической оси D. Первое верхнее звено 68 и первое нижнее звено 70 шарнирно соединены друг с другом вокруг пятой геометрической оси E, тогда как второе верхнее звено 69 и второе нижнее звено 71 шарнирно соединены друг с другом вокруг шестой геометрической оси F.
[0084] Шесть геометрических осей A, B, C, D, E и F шарнирного сочленения горизонтальны и параллельны продольному направлению. Оси A и B проходят в первой горизонтальной плоскости, оси C и D проходят во второй горизонтальной плоскости, тогда как оси E и F проходят в третьей горизонтальной плоскости, расположенной вертикально между первой и второй горизонтальными плоскостями.
[0085] Опора 63 для пальцев соединена с первым верхним звеном 68 и/или с первым нижним звеном 70 посредством первого скользящего соединения. В представленном варианте осуществления первое скользящее соединение сформировано физическим шпинделем 72, образующим пятую ось E поворота первого верхнего звена 68 относительно первого нижнего звена 70, и направляющей 73 скольжения, сформированной в опоре 63 для пальцев. Физический шпиндель 72 скользит в горизонтальном направлении по направляющей 73 скольжения. Направляющая 73 скольжения протяжена в горизонтальном поперечном направлении. Опора 63 для пальцев соединена со вторым нижним звеном 69 и/или вторым нижним звеном 71 посредством второго скользящего соединения. Второе скользящее соединение сформировано физическим шпинделем 74, образующим шестую ось F поворота второго верхнего звена 69 относительно второго нижнего звена 71, и направляющей 75 скольжения, сформированной в опоре 63 для пальцев и по которой физический шпиндель 74 скользит горизонтально. Направляющая 75 скольжения протяжена в горизонтальном поперечном направлении.
[0086] Шесть геометрических осей A, B, F, D, C, E образуют деформируемый шарнирный шестиугольник, который выполнен так, что во время перемещения верхней рамы 26 из её исходного положения в её положение гибки, как только верхние подштамповые подушки 42, 43, 44, 45 достигают их промежуточного положения прижима, в котором они прижимают угловую часть 2 к нижним подштамповым подушкам 27, 28, шестиугольник, сформированный шестью геометрическими осями A, B, F, D, C, E, деформируется и, конкретнее, уплощается. Как только верхние подштамповые подушки 42, 43, 44, 45 оказываются в их промежуточном положении прижима, вертикальное относительное перемещение опоры 63 для пальцев и, следовательно, пальцев 61, 62 в связи с этим становится меньше, чем вертикальное перемещение верхней рамы 26. Другими словами, механизм шарнирного соединения выполнен с возможностью формирования редуктора, обеспечивающего уменьшение вертикального относительного перемещения пальцев 61, 62 относительно перемещения верхней рамы 25.
[0087] Кроме того, в соответствии с предпочтительным вариантом осуществления вертикальное перемещение опоры 63 для пальцев относительно верхней рамы 26 направляется направляющим устройством. В представленном варианте осуществления направляющее устройство включает в себя две направляющие трубки 76, представленные на фиг. 6, в частности, которые прикреплены к опоре 63 для пальцев. Направляющие трубки 76 продолжаются вертикально и скользят внутри отверстий 77, сформированных в верхней раме 26.
[0088] Механизм шарнирного соединения, другими словами, первая и вторая группы из четырёх звеньев, предпочтительно установлен с возможностью съёма. В связи с этим можно изменять кинематику опоры 63 для пальцев относительно верхней рамы 26 в зависимости от геометрии угловой части 2, которую требуется изгибать.
[0089] Аналогично, как показано на фигурах 7 и 9, пальцы 61, 62 и центральный палец 60 также закреплены с возможностью съёма на гибочной системе. Кроме того, видно, что концы пальцев 61, 62 и центрального пальца 60 имеют сферическую форму.
[0090] Способ использования гибочной системы 1 будет далее описан подробно.
[9991] Первоначально металлическую пластину предварительно сгибают для того, чтобы сформировать угловую часть 2, включающую в себя первый фланец 11 и второй фланец 12, которые наклонены относительно друг друга.
[0092] После этого угловую часть 2, сделанную таким образом, располагают напротив первой и второй опорных поверхностей 29, 30 нижних подштамповых подушек 27, 28. Выступающий угол α угловой части 2 направляют к нижней раме 25 так, что внутренние поверхности первого и второго фланцев 11, 12 лежат на первой и второй опорных поверхностях 29, 30 нижних подштамповых подушек 27, 28.
[0093] Когда угловая часть 2 правильно расположена, верхнюю раму 26 перемещают вниз из её исходного положения в ее положение гибки. Во время перемещения верхней рамы 26 в её положение гибки верхние подштамповые подушки 42, 43, 44, 45 приходят в промежуточное положение прижима, в котором первый фланец 11 и второй фланец 12 угловой части 2 зажимаются между прижимными пластинами 47 верхних подштамповых подушек 42, 43, 44, 45 и нижними подштамповыми подушками 27, 28.
[0094] Когда верхние подштамповые подушки 42, 43, 44, 45 достигают их промежуточного положения прижима, кулачковая поверхность 58 каждого из первого и второго подвижных узлов 40, 41 взаимодействует с соответственным кулачковый следящим элементом 59, жёстко прикреплённым к нижней раме 25, таким образом, что, когда верхняя рама 26 продолжает свой ход по направлению к её положению гибки, первый и второй подвижные узлы 40, 41 перемещаются по направлению друг к другу, и каждый пуансон 31 перемещается перпендикулярно первому или второму фланцу 11, 12 угловой части 2. В связи с этим пуансоны 31 деформируют первый и второй фланцы 11, 12 угловой части 2 таким образом, чтобы сформировать первый участок 18 и второй участок 19 гофра 17.
[0095] Угловую часть 2 зажимают между опорными поверхностями нижних подштамповых подушек 27, 28 и прижимными поверхностями прижимных пластин, упомянутая угловая часть 2 при деформации пуансонами 31 прикладывает растягивающие усилия к нижним подштамповым подушкам 27, 28 и прижимным пластинам 47, что вызывает их перемещение в положение близко друг к другу. Нижние подштамповые подушки 27, 28 и прижимные пластины 47 затем перемещают в их положение близко друг к другу синхронизированным с перемещением пуансонов 31 образом. Это позволяет быть уверенным, что толщина угловой части 2 не изменяется или изменяется незначительно, когда угловую часть 2 изгибают.
[0096] Кроме того, одновременно с деформацией первого и второго фланцев 11, 12 угловой части 2 пуансонами 31 устройство для деформации линии сгиба деформирует линию 13 сгиба. Два пальца деформируют линию 13 сгиба по направлению к нижней раме 25 с соответственных противоположных сторон от центрального пальца 60, тогда как последний прикладывает силу противодействия в направлении верхней рамы 26, что позволяет сформировать в линии 13 сгиба деформированную зону, имеющую W-образную общую форму, описанную выше. При деформации угловая часть 2 также прикладывает поперечные силы к пальцам 61, 62, что заставляет их перемещаться.
[0097] Со ссылкой на фиг. 15 вид в разрезе танкера-метановоза 170 показывает герметичный и изолированный резервуар 171 призматической общей формы, установленный в двойном корпусе 172 судна. Стенка резервуара 171 содержит основной герметизированный барьер, предназначенный находиться в контакте с LNG, содержащемся в резервуаре, вспомогательный герметизированный барьер, расположенный между основным герметизированным барьером и двойным корпусом 172 судна, и два изолирующих барьера, соответственно расположенных между основным герметизированным барьером и вспомогательным герметизированным барьером и между вспомогательным герметизированным барьером и двойным корпусом 172.
[0098] Сами по себе известным образом погрузочно-разгрузочные трубы 173, расположенные на верхней палубе судна, могут быть соединены посредством подходящих соединителей с морским или портовым терминалом для транспортировки груза LNG из резервуара 171 или в резервуар 171.
[0099] Фиг. 15 показывает пример морского терминала, включающего в себя погрузочно-разгрузочную станцию 175, подводный трубопровод 176 и наземную установку 177. Погрузочно-разгрузочная станция 175 представляет собой стационарную прибрежную установку, включающую в себя подвижную стрелу 174 и колонну 178, которая поддерживает подвижную стрелу 174. Подвижная стрела 174 удерживает связку изолированных гибких труб 179, которые могут быть соединены с погрузочно-разгрузочными трубами 173. Ориентируемая подвижная стрела 174 адаптируется ко всем габаритным размерам груза танкера-метановоза. Соединительная труба, которая не показана, продолжается внутри колонны 178. Погрузочно-разгрузочная станция 175 позволяет загружать и разгружать танкер-метановоз 170 из наземной установки 177 или в наземную установку 177. Последняя включает в себя резервуары 180 для хранения сжиженного газа и соединительные трубы 181, соединенные с помощью подводного трубопровода 176 с погрузочно-разгрузочной станцией 175. Подводный трубопровод 176 обеспечивает транспортировку сжиженного газа между погрузочно-разгрузочной станцией 175 и наземной установкой 177 на большое расстояние, например, 5 км, что позволяет танкеру-метановозу 170 оставаться на большом расстоянии от берега во время погрузочно-разгрузочных операций.
[0100] Насосы на борту судна 170 и/или насосы, которыми оснащена наземная установка 177, и/или насосы, которыми оснащена погрузочно-разгрузочная станция 175, используются для создания давления, необходимого для транспортировки сжиженного газа.
[0101] Альтернативно, угловая часть, описанная выше, может в равной степени использоваться для изготовления резервуара, включающего в себя только одну уплотнительную мембрану. Этот тип резервуара, в общем, используется для транспортировки жидкого газа, точка кипения которого и атмосферное давление выше -55°C.
[0102] Несмотря на то, что изобретение было описано в связи с множеством частных вариантов осуществления, очевидно, что оно никоим образом не ограничено ими и что оно охватывает все технические эквиваленты и комбинации описанных средств, если последние находятся в пределах объёма охраны изобретения, определенного формулой изобретения.
[0103] Использование глаголов «включать в себя» или «содержать» и их сопряженных форм не исключает наличия элементов или других этапов, отличных от тех, которые изложены в пункте формулы изобретения.
[0104] В формуле изобретения любая ссылочная позиция в круглых скобках не должна интерпретироваться как ограничение пункта формулы изобретения.
Изобретение относится к формированию гофра для изготовления уплотнительной мембраны для резервуара для хранения текучей среды. Гибочная система для формирования гофра содержит верхнюю раму и нижнюю раму, пуансон, удерживаемый верхней рамой, две нижние подштамповые подушки, удерживаемые нижней рамой, две верхние подштамповые подушки, удерживаемые верхней рамой и расположенные в поперечном направлении с соответственных противоположных сторон от пуансона, и устройство для деформации заранее сформированной линии сгиба. Устройство для деформации заранее сформированной линии сгиба содержит центральный палец, предназначенный для расположения напротив пересечения между заранее сформированной линией сгиба и гофром, подлежащим образованию, и удерживаемый нижней рамой, и два пальца, предназначенные для деформации заранее сформированной линии сгиба, расположенные в поперечном направлении с соответственных противоположных сторон от центрального пальца. Два пальца установлены на опоре для пальцев, которая кинематически соединена с верхней рамой и с верхними подштамповыми подушками механизмом шарнирного соединения. В результате осуществляют гибку гофра в угловых частях, имеющих разные углы. 2 н. и 13 з.п. ф-лы, 15 ил.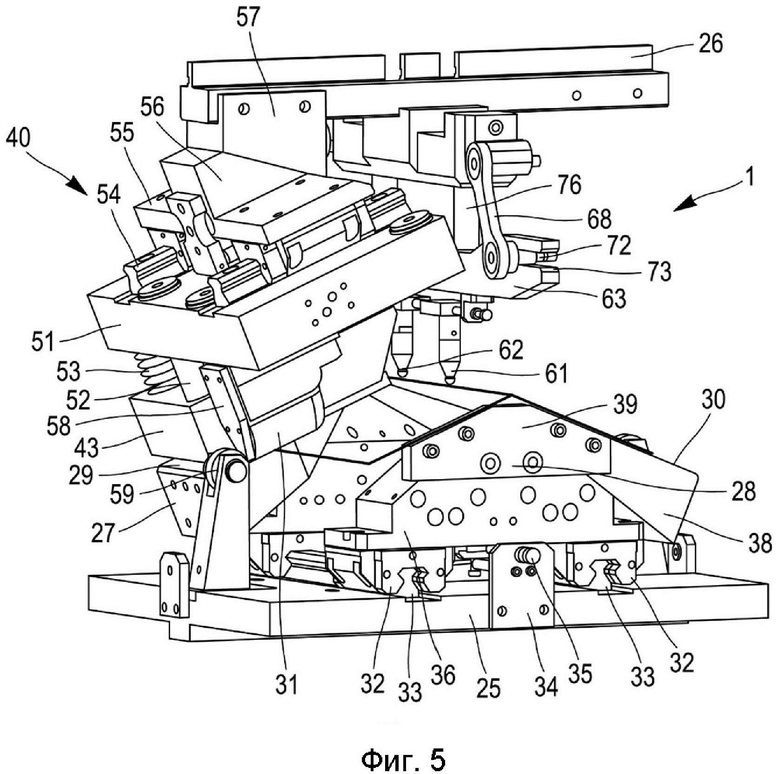
1. Гибочная система (1) для формирования гофра (17) в части (2) для формирования в ней гофра, предназначенной для изготовления уплотнительной мембраны (3) для резервуара для хранения текучей среды, упомянутая часть (2) для формирования в ней гофра имеет заранее сформированную линию (13) сгиба, перпендикулярную гофру (17), подлежащему формированию, причём гибочная система (1) включает в себя
верхнюю раму (26) и нижнюю раму (25), выполненные с возможностью перемещения в вертикальном направлении относительно друг друга между исходным положением и положением гибки,
по меньшей мере один пуансон (31), удерживаемый верхней рамой (26) и предназначенный для надавливания на часть для того, чтобы формировать гофр (17) во время относительного перемещения между верхней рамой (26) и нижней рамой (25) из исходного положения в положение гибки,
по меньшей мере две нижние подштамповые подушки (27, 28), удерживаемые нижней рамой (25), и две верхние подштамповые подушки (42, 43, 44, 45), удерживаемые верхней рамой (26) и расположенные в поперечном направлении с соответственных противоположных сторон от пуансона (31), каждая верхняя подштамповая подушка (42, 43, 44, 45) включает в себя прижимную поверхность, а каждая нижняя подштамповая подушка (27, 28) включает в себя по меньшей мере одну опорную поверхность (29, 30), обращённую к прижимной поверхности одной из верхних подштамповых подушек (42, 43, 44, 45) и параллельную ей, так что в промежуточном положении прижима прижимные поверхности верхних подштамповых подушек (42, 43, 44, 45) прижимают часть (2) для формирования в ней гофра к опорным поверхностям (29, 30) нижних подштамповых подушек (27, 28), каждая верхняя подштамповая подушка (42, 43, 44, 45) установлена на верхней раме (26) с возможностью перемещения в направлении, перпендикулярном прижимной поверхности упомянутой верхней подштамповой подушки (42, 43, 44, 45), таким образом, что упомянутая верхняя подштамповая подушка (42, 43, 44, 45) перемещается относительно верхней рамы (26) в упомянутом направлении, перпендикулярном прижимной поверхности, как только, во время относительного перемещения из исходного положения в положение гибки, упомянутая верхняя подштамповая подушка (42, 43, 44, 45) достигает промежуточного положения прижима,
причём гибочная система (1) дополнительно включает в себя устройство для деформации заранее сформированной линии (13) сгиба, включающее в себя:
центральный палец (60), предназначенный для расположения напротив пересечения между заранее сформированной линией (13) сгиба и гофром (17), подлежащим образованию, при этом центральный палец (60) удерживается нижней рамой (25), и
два пальца (61, 62), предназначенные для деформации заранее сформированной линии сгиба, расположенные в поперечном направлении с соответственных противоположных сторон от центрального пальца (60), при этом два пальца (61, 62) установлены на опоре (63) для пальцев, опора (63) для пальцев кинематически соединена с верхней рамой (26) и с верхними подштамповыми подушками (42, 43, 44, 45) механизмом шарнирного соединения, который выполнен с возможностью образования редуктора, обеспечивающего уменьшение вертикального перемещения опоры (63) для пальцев относительно относительного вертикального перемещения между верхней рамой (26) и нижней рамой (25), когда, во время относительного перемещения между верхней рамой (26) и нижней рамой (25) из исходного положения в положение гибки, верхние подштамповые подушки (42, 43, 44, 45) находятся в промежуточном положении прижима.
2. Гибочная система (1) по п. 1, в которой механизм шарнирного соединения включает в себя по меньшей мере одну первую группу из четырёх звеньев, включающую в себя первое верхнее звено (68), шарнирно установленное на верхней раме (26) вокруг первой геометрической оси (A), второе верхнее звено (69), шарнирно установленное на верхней раме (26) вокруг второй геометрической оси (B), первое нижнее звено (70), шарнирно установленное на одной из верхних подштамповых подушек (42, 43, 44, 45) вокруг третьей геометрической оси (C), и второе нижнее звено (71), шарнирно установленное на другой из верхних подштамповых подушек (42, 43, 44, 45) вокруг четвертой геометрической оси (D), причём первое верхнее звено (68) и первое нижнее звено (70) шарнирно соединены друг с другом вокруг пятой геометрической оси (E), второе верхнее звено (69) и второе нижнее звено (71) шарнирно соединены друг с другом вокруг шестой геометрической оси (F), первая, вторая, третья, четвертая, пятая и шестая геометрические оси (A, B, C, D, E, F) параллельны горизонтальному направлению, перпендикулярному заранее сформированной линии (13) сгиба, опора (63) для пальцев соединена, с одной стороны, с первым верхним звеном (68) и/или с первым нижним звеном (70) посредством первого скользящего соединения, а с другой стороны, со вторым верхним звеном (69) и/или вторым нижним звеном (71) посредством второго скользящего соединения, при этом первое и второе скользящие соединения выполнены с возможностью поддержания опоры (63) для пальцев в вертикальном направлении.
3. Гибочная система (1) по п. 2, в которой первое скользящее соединение включает в себя первый физический шпиндель (72), который соединён с первым верхним звеном (68) и/или с первым нижним звеном (70), причём первый физический шпиндель (72) установлен с возможностью скольжения в первой направляющей (73) скольжения, образованной в опоре (63) для пальцев, а второе скользящее соединение включает в себя второй физический шпиндель (74), который соединён со вторым верхним звеном (69) и/или вторым нижним звеном (71), второй физический шпиндель (74) установлен с возможностью скольжения во второй направляющей (75) скольжения, образованной в опоре (63) для пальцев.
4. Гибочная система (1) по п. 3, в которой первый физический шпиндель (72) проходит вдоль пятой геометрической оси (E), а второй физический шпиндель (74) проходит вдоль шестой геометрической оси (F).
5. Гибочная система (1) по любому одному из пп. 2-4, в которой первая и вторая геометрические оси (A, B) проходят в первой горизонтальной плоскости, третья и четвертая геометрические оси (C, D) проходят во второй горизонтальной плоскости, пятая и шестая геометрические оси (E, F) проходят в третьей горизонтальной плоскости, расположенной вертикально между первой горизонтальной плоскостью и второй горизонтальной плоскостью.
6. Гибочная система (1) по любому одному из пп. 1-5, в которой два пальца (61, 62) установлены с возможностью скольжения в поперечном направлении на опоре (63) для пальцев.
7. Гибочная система (1) по любому одному из пп. 1-5, в которой пальцы (61, 62) имеют конец сферической формы.
8. Гибочная система (1) по любому одному из пп. 1-7, в которой центральный палец (60) имеет конец сферической формы.
9. Гибочная система (1) по любому одному из пп. 1-8, в которой часть (2) для формирования в ней гофра представляет собой угловую часть, включающую в себя первый фланец (11) и второй фланец (12), которые наклонены относительно друг друга под углом α от 1 до 179° включительно,
каждая из двух нижних подштамповых подушек (27, 28) включает в себя первую и вторую опорные поверхности (29, 30), которые наклонены относительно друг друга под углом α и соответственно предназначены для приёма первого фланца (11) и второго фланца (12) угловой части, причём упомянутые нижние подштамповые подушки (27, 28) установлены с возможностью скольжения на нижней раме (25) в поперечном направлении между положением близко друг к другу и положением в отдалении друг от друга.
10. Гибочная система (1) по п. 9, в которой каждая из нижних подштамповых подушек (27, 28) включает в себя основание (36), с помощью которого упомянутая нижняя подштамповая подушка (27, 28) установлена с возможностью скольжения на нижней раме (25) в поперечном направлении, причём первая и вторая опорные поверхности (29, 30) каждой из нижних подштамповых подушек (27, 28) установлены с возможностью съёма на упомянутом основании (36).
11. Гибочная система (1) по п. 9 или 10, в которой пуансон (31) и две верхние подштамповые подушки (42, 43) являются частью первого подвижного узла (40), установленного на верхней раме (26) и расположенного напротив первых опорных поверхностей (29) нижних подштамповых подушек (27, 28), упомянутый пуансон (31) предназначен для формирования участка гофра (17) в первом фланце (11) угловой части, первый подвижный узел (40) дополнительно включает в себя опору (51), к которой прикреплен пуансон (31), причём гибочная система (1) дополнительно включает в себя второй подвижный узел (41), расположенный напротив вторых опорных поверхностей (30) нижних подштамповых подушек (27, 28), второй подвижный узел (41) включает в себя опору (51), пуансон (31), прикрепленный к упомянутой опоре (51) и предназначенный для образования участка гофра (17) во втором фланце (12) угловой части, и две верхние подштамповые подушки (44, 45), расположенные в поперечном направлении с соответственных противоположных сторон от упомянутого пуансона (31),
каждая верхняя подштамповая подушка (42, 43, 44, 45) включает в себя основную конструкцию (46) и прижимную пластину (47), которая имеет прижимную поверхность, расположенную напротив неё, параллельную одной из первой и второй опорных поверхностей (29, 30) нижних подштамповых подушек (27, 28), упомянутая прижимная пластина (47) установлена с возможностью скольжения в поперечном направлении на упомянутой верхней подштамповой подушке (42, 43, 44, 45), каждая верхняя подштамповая подушка (42, 43, 44, 45) установлена на опоре (51) упомянутого первого или второго подвижного узла (40, 41) с возможностью перемещения в направлении, перпендикулярном прижимной поверхности упомянутой верхней подштамповой подушки (42, 43, 44, 45),
опора (51) каждого из первого и второго подвижных узлов (40, 41) установлена на верхней раме (26) с возможностью перемещения в направлении, параллельном продольному направлению пуансона (31) упомянутого первого или второго подвижного узла (40, 41).
12. Гибочная система (1) по п. 2 или 11, в которой механизм шарнирного соединения включает в себя вторую группу из четырёх звеньев, которая симметрична первой группе из четырёх звеньев относительно поперечной плоскости, причём первая и вторая группы из четырёх звеньев соответственно шарнирно установлены на верхних подштамповых подушках (42, 43, 44, 45) первого и второго подвижных узлов (40, 41).
13. Гибочная система (1) по п. 11 или 12, в которой каждый из первого и второго подвижных узлов (40, 41) включает в себя кулачковую поверхность (58), выполненную с возможностью взаимодействия с кулачковым следящим элементом (59), установленным на нижней раме (25), во время относительного перемещения между верхней рамой (26) и нижней рамой (25) из исходного положения в положение гибки, причем кулачковая поверхность (58) и кулачковый следящий элемент (59) выполнены так, что опора (51) упомянутого первого или второго подвижного узла (40, 41) скользит по нижней раме (25) таким образом, чтобы обеспечивать перемещение опоры (51) упомянутого первого или второго подвижного узла (40, 41) в направлении, перпендикулярном прижимным поверхностям верхних подштамповых подушек (42, 43, 44, 45) упомянутого первого или второго подвижного узла (40, 41), во время относительного перемещения между верхней рамой (26) и нижней рамой (25) из исходного положения в положение гибки.
14. Гибочная система (1) по п. 11 или 12, в которой каждый первый или второй подвижный узел (40, 41) установлен с возможностью скольжения на промежуточном элементе (56), причём упомянутый промежуточный элемент (56) прикреплен с возможностью съёма к верхнему клину (57), который прикреплён с возможностью съёма к верхней раме (26).
15. Способ формирования гофра путем гибки в части (2) для формирования в ней гофра, предназначенной для изготовления уплотнительной мембраны (3) для резервуара для хранения текучей среды, упомянутая часть (2) для формирования в ней гофра имеет заранее сформированную линию (13) сгиба, перпендикулярную гофру (17), подлежащему формированию, с помощью гибочной системы (1) по любому одному из пп. 1-14, включающий в себя этапы, на которых:
располагают часть (2) для формирования в ней гофра для опирания на опорные поверхности (29, 30) нижних подштамповых подушек (27, 28) и
перемещают верхнюю раму (26) и нижнюю раму (25) относительно друг друга из исходного положения в положение гибки.
| WO 2016030619 A1, 03.03.2016 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ЯЧЕИСТОЙ СТРУКТУРЫ И ЯЧЕИСТАЯ СТРУКТУРА | 1989 |
|
RU2043805C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ЛЕНТЫ С ГОФРАМИ, РАСПОЛОЖЕННЫМИ В ШАХМАТНОМ ПОРЯДКЕ | 2008 |
|
RU2363556C1 |
| WO 2015170054 A1, 12.11.2015. | |||

