Область техники
Настоящее изобретение относится к навигации, в частности, к определению положения объекта в пространстве, более конкретно, к способу автономной выставки бесплатформенной навигационной системы в процессе выхода управляемого объекта из пике после приводнения на основании измерений трехосного акселерометра (измерений вектора кажущегося ускорения - разности между истинным ускорением и ускорением свободного падения).
Уровень техники
В известном уровне техники поставлена следующая задача: управляемый объект свободно падает или опускается на парашюте носовой частью вниз - пикирует. Другая информация об его ориентации в пространстве отсутствует - навигационная система не выставлена. При достижении водной поверхности управляемый объект должен быстро погасить свою кинетическую энергию и выйти из пикирующего режима, чтобы не уткнуться в дно, при этом оценить свою ориентацию в пространстве (осуществить выставку навигационной системы) так, чтобы после указанного маневра можно было включить двигатель и формировать дальнейшую подводную траекторию с помощью инерциального управления.
Из уровня техники известен способ выставки навигационной системы, описанный в JPH 0618276 А, 25.01.1994, и предусматривающий использование вектора кажущегося ускорения, измеренного трехосным акселерометром в момент старта, в качестве известного направления по которому осуществляется ориентирование системы координат.
Использование известного способа крайне ограничено, так как он не может быть осуществлен при существенной подвижности основания.
Раскрытие сущности изобретения
Технический результат заявленного изобретения заключается в создании способа автономной выставки бесплатформенной навигационной системы в процессе выхода управляемого объекта из пике после приводнения, позволяющего избежать столкновения с дном и при этом оценить ориентацию объекта в пространстве с точностью, достаточной для формирования последующей траектории с помощью инерциального управления.
Упомянутый технический результат достигается за счет способа автономной выставки бесплатформенной навигационной системы в процессе выхода управляемого объекта из пике после приводнения, включающего следующие операции:
задание значения угла дифферента определяющего режим планирования;
задание диапазона угла дифферента и промежутка времени, определяющих выход объекта в установившийся режим планирования;
после получения сигнала о приводнении, непрерывное измерение вектора кажущегося ускорения W с помощью трехосного акселерометра, неподвижно закрепленного в корпусе управляемого объекта;
непрерывное вычисление текущей оценки угла дифферента ϑ управляемого объекта от плоскости, перпендикулярной измеренному вектору кажущегося ускорения W;
непрерывную корректировку направления движения путем поворота рулей на угол δ таким образом, чтобы совместить текущую оценку угла дифферента ϑ управляемого объекта с заданным значением ϑ*:

где: k - коэффициент пропорциональности, значение которого определяется типом управляемого объекта;
как только движение приблизится к установившемуся режиму планирования, определяемому нахождением оценки текущего угла дифферента ϑ управляемого объекта в заданном диапазоне на протяжении заданного промежутка времени, вертикаль, совпадающая с текущим вектором W, фиксируется и в дальнейшем не уточняется - выставка навигационной системы завершена.
Заявленный способ выставки базируется на том факте, что если управляемый объект не ускоряется и не вращается, то установленный на его борту трехосный акселерометр будет измерять вектор кажущегося ускорения, направление которого совпадает с вертикалью (вверх), а модуль равен g=9,81 м/с2 - ускорению свободного падения.
После приводнения управляемый объект энергично маневрирует и вращается: кажущееся ускорение W в разы превосходит g, а угловая скорость достигает сотен градусов в секунду. Несмотря на такую подвижность основания (маневр управляемого объекта), в рамках заявленного способа предлагается использовать текущий измеренный вектор кажущегося ускорения W в качестве вертикали и по ней непрерывно вычислять и осуществлять управляющие воздействия на рули для формирования маневра выхода из пике.
Закон управления на всей траектории маневра одинаков: рули отклоняются так, чтобы объект принял заданный дифферент по отношению к горизонту, который принимается перпендикулярным текущему измерению вектора кажущегося ускорения W. После погашения начальной кинетической энергии управляемый объект при заданном угле дифферента ϑ* должен осуществлять планирующее погружение в установившемся режиме, соответственно, управляемый объект должен обладать отрицательной плавучестью и управляемостью в этом режиме.
На первоначальном участке маневра оценка вертикали по вектору W груба, однако, ее вполне достаточно для того, чтобы поднять нос объекта - вывести из пике.
По мере того, как объект теряет первоначальную кинетическую энергию, его ускорения и угловые скорости затухают, а движение приближается к установившемуся режиму планирующего погружения с углом дифферента. При этом измеряемый вектор W асимптотически приближается к точному направлению вертикали.
Как только движение приблизится к установившемуся режиму планирования на заданную величину (порядка 1°) в течение заданного промежутка времени (порядка 3 с), маневр считается законченным. Вертикаль, совпадающая с текущим вектором кажущегося ускорения W, фиксируется и в дальнейшем не уточняется - выставка навигационной системы завершена.
Качество маневра и выставки навигационной системы может быть улучшено следующими способами.
Первый способ использует показания датчиков угловых скоростей (ДУС) для традиционной оценки ориентации управляемого объекта относительно вспомогательной инерциальной системы координат, произвольно фиксируемой в момент приводнения. Измеряемый в связанных с изделием осях вектор кажущего ускорения W проецируется на оси полученной вспомогательной инерциальной системы координат, где он усредняется с помощью цифровых фильтров, например, БИХ-фильтров. В остальном реализация управления совпадает с описанной выше процедурой.
Использование инерциальной системы координат вместо связанной уменьшает колебательность процесса и, как следствие, длительность выхода на установившийся режим планирования. Известно, что вращение объектов рассматриваемого типа вокруг центра масс происходит намного быстрее движения самого центра масс. Поскольку вектор W характеризует движение центра масс, а не вращение объекта, то он меняется медленнее, чем ориентация объекта, а на конечном участке установившегося планирования и вовсе постоянен. Однако вектор W измеряется акселерометром, который жестко закреплен в корпусе объекта и вращается вместе с ним. В результате измеряемые акселерометром проекции вектора W на оси связанной системы координат будут меняться синхронно с вращением объекта даже в том случае, когда вектор W постоянен. Если же показания акселерометров перевести в инерциальную систему координат, то там они будут постоянны. Данное свойство позволяет эффективно отфильтровывать различные быстроменяющиеся ошибки, например, связанные с установкой акселерометра не в центре масс объекта, совершающего колебательное угловое движение.
Второй способ также использует показания ДУС, но уже для демпфирования процесса. При этом угол поворота рулей рассчитывается как:
δ=k(ϑ-ϑ*)+kωωz,
где: ωz - измеренная ДУС угловая скорость по каналу дифферента,
kω - коэффициент демпфирования, значение которого определяется типом управляемого объекта.
Указанный закон управления известен в теории автоматического регулирования, как пропорционально-дифференциальный регулятор (PD-регулятор), который существенно улучшает качество переходных процессов по сравнению с пропорциональным регулятором (1).
Третий способ позволяет кроме дифферента дополнительно контролировать угол крена. Способ управления креном аналогичен рассмотренному выше управлению дифферентом и включает в себя следующие действия:
задание значения требуемого утла крена γ*;
задание диапазона угла крена и промежутка времени, определяющих выход объекта в установившийся режим движения;
после получения сигнала о приводнении, непрерывное оценивание текущего угла крена γ управляемого объекта относительно направления измеренного вектора кажущегося ускорения W;
использование ДУС для измерения угловой скорости ωх в канале крена;
непрерывное управление поворотом рулей канала крена таким образом, чтобы совместить текущую оценку угла крена γ управляемого объекта с заданным значением γ*:
δγ=kγ(γ-γ*)+kωγωх,
где: kγ - коэффициент пропорциональности для угла крена, значение которого определяется типом управляемого объекта,
kωγ - коэффициент демпфирования по каналу крена, значение которого также определяется типом управляемого объекта.
Теоретически возможна ситуация, когда управляемый объект входит в воду строго вертикально. При этом направление вектора W совпадает с продольной осью управляемого объекта, а текущая оценка ϑ дифферента равна 90°, т.е. оценка плоскости горизонта перпендикулярна оси управляемого объекта. В таком случае возникает неопределенность, - в какую из сторон поднимать нос управляемого объекта. Поскольку все стороны равны, то и поднимать нос управляемого объекта можно в любую из них. Через доли секунды направление вектора W перестанет совпадать с продольной осью объекта и управление можно осуществлять по описанному ранее способу.
Краткое описание чертежей
Настоящее изобретение поясняется следующими графическими материалами:
Фиг. 1. Схема выхода управляемого объекта из пике после приводнения.
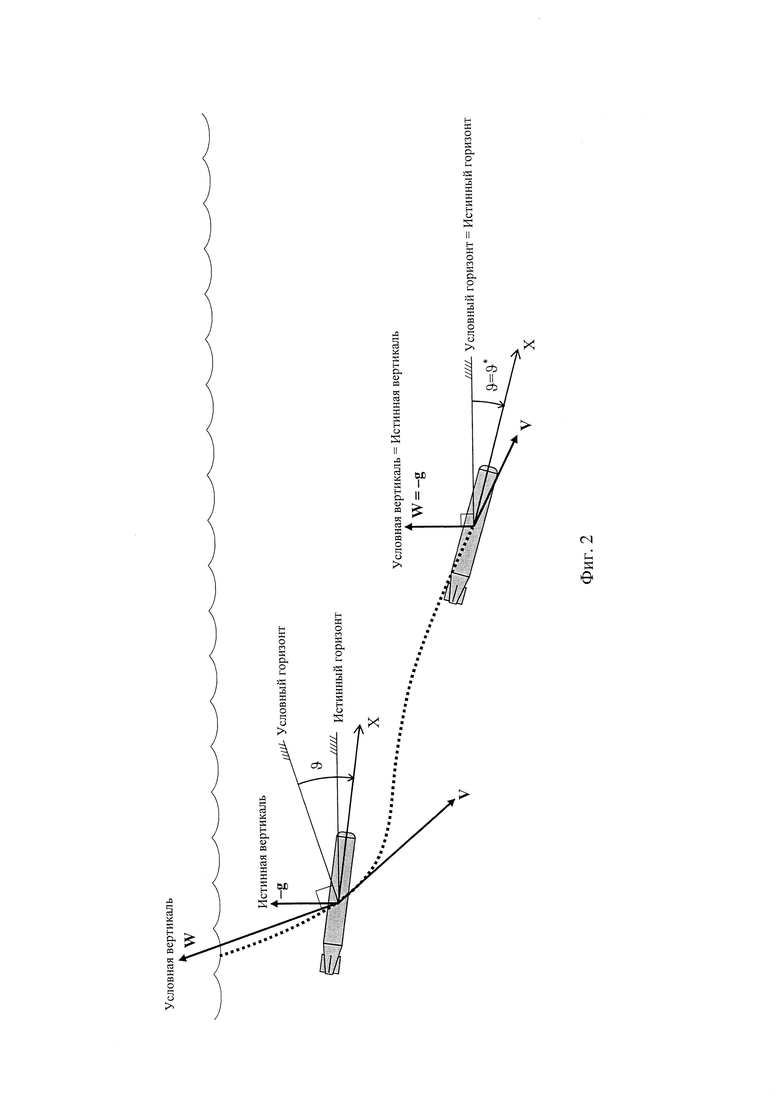
Фиг. 2. Расклад направлений и векторов в начале и в конце маневра.
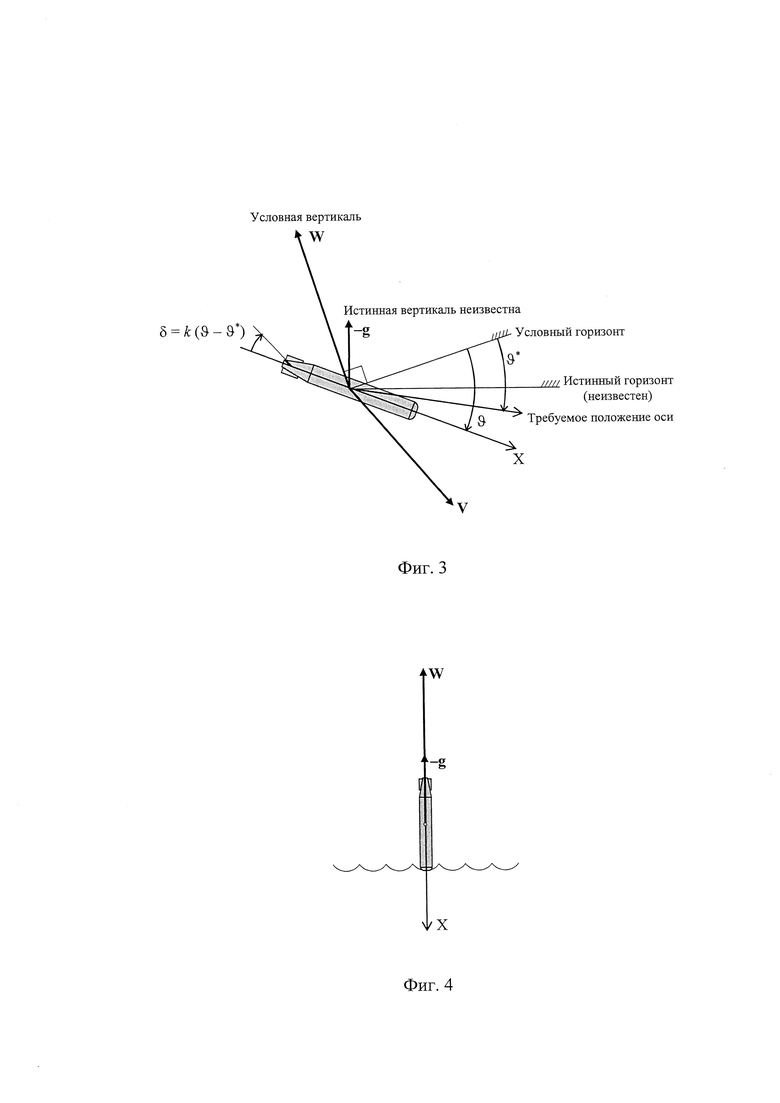
Фиг. 3. Расчет команд на рули.
Фиг. 4. Случай совпадения вектора ускорения с продольной осью управляемого объекта при строго отвесном пикировании.
Фиг. 5. Графики изменения углов дифферента и крена во времени при проведении натурных экспериментов.
Осуществление изобретения
Для осуществления заявленного способа автономной выставки навигационной системы управляемый объект должен иметь, по меньшей мере, следующее:
- трехосный акселерометр, неподвижно закрепленный в его корпусе;
- органы управления пространственной ориентацией при движении под водой, в частности, элевоны;
- контроллер или бортовой компьютер, рассчитывающий команды на органы управления в зависимости от показаний акселерометра.
Кроме того, управляемый объект должен:
- входить в воду носовой частью вниз;
- обладать свойством управляемого планирующего погружения в установившемся режиме с некоторым углом дифферента ϑ* (носом вниз). В частности, управляемый объект должен обладать отрицательной плавучестью.
Заявленный способ может использоваться для таких управляемых объектов как торпеды, ракеты-торпеды и другие беспилотные подводные аппараты, в частности исследовательские или разведывательные.
Фиг. 1 раскрывает схему выхода управляемого объекта из пике после приводнения, на которой: 1 - полет в атмосфере, 2 - приводнение; 3 - энергичный выход из пике; 4 - выход на режим планирования, завершение маневра и выставки; 5 - включение двигателя, инерциальное управление траекторией.
Заявленный способ автономной выставки навигационной системы предусматривает следующее.
При сбросе управляемого объекта с носителя ему не вводится информация об ориентации - навигационная система не выставлена.
Полет в атмосфере осуществляется без управления. Приводнение объекта носом вниз (пикирование) обеспечивается стабилизатором, парашютом, либо иными средствами.
Момент приводнения определяется по превышению измеряемого ускорения порогового значения или по сигналу от датчика замачивания.
С момента приводнения управляемый объект начинает формировать свою траекторию с помощью органов управления, которые задействуются таким образом, чтобы совместить текущую оценку угла дифферента ϑ управляемого объекта с заданным значением угла дифферента ϑ*. При этом ϑ отсчитывается не от горизонтальной плоскости, так как положение горизонтальной плоскости неизвестно - навигационная система не выставлена, а от плоскости, перпендикулярной измеренному вектору W кажущегося ускорения. Кажущийся вектор ускорения принимается за направление вертикально вверх, как показано на фиг. 2.
На фиг. 2-4 использованы следующие обозначения:
X - продольная ось управляемого объекта;
W - вектор кажущегося ускорения;
ϑ - текущая оценка угла дифферента;
ϑ* - заданный угол дифферента;
δ - угол поворота рулей;
V - вектор скорости;
g - вектор ускорения свободного падения;
k - коэффициент пропорциональности для угла дифферента.
Если в качестве органов управления используются элевоны, то (как показано на фиг. 3) угол δ их поворота задается пропорционально разнице между текущей оценкой угла ϑ и его заданным значением ϑ*:
δ=k(ϑ-ϑ*).
По мере стабилизации планирования управляемого объекта направление измеряемого вектора кажущегося ускорения W асимптотически приближается к вертикали (см. фиг. 2). Как следствие, оценка угла дифферента, измеряемого относительно направления кажущегося ускорения, приближаются к истинному значению угла дифферента.
Как только движение приблизится к установившемуся режиму планирования на заданную величину (порядка 1°) в течение заданного промежутка времени (порядка 3 с), маневр считается законченным. Вертикаль, совпадающая с текущим вектором W, фиксируется и в дальнейшем не уточняется - выставка навигационной системы завершена.
С момента окончания маневра ориентация управляемого объекта оценивается традиционным способом с помощью интегрирования показаний датчиков угловых скоростей (ДУС), например, методом интегрирования уравнений Пуассона. Управляемый объект может включить двигатель и формировать дальнейшую подводную траекторию традиционным способом с помощью инерциального управления.
Заявленный способ не позволяет осуществить оценку угла курса. Для ряда управляемых объектов этого не требуется, например, если после приводнения они осуществляют круговой поиск. При необходимости можно использовать магнитометры или применять другие способы определения курса.
В случае, если целеуказания по курсу для управляемого объекта задаются относительно оси носителя в момент отделения, то относительный курс можно оценивать следующим способом. С момента отделения управляемого объекта от носителя и до момента окончания автономной выставки навигационной системы, т.е. на протяжении полета в атмосфере, приводнения и маневра выхода из пике, параллельно с задачей автономной выставки решается традиционным способом вспомогательная навигационная задача оценки ориентации управляемого объекта по показаниям ДУС. Начальный угол курса для вспомогательной задачи считается нулевым. После окончания автономной выставки прекращается решение обеих задач. Далее решается классическая задача инерциальной навигации по показаниям ДУС. В качестве начальных условий для нее углы дифферента и крена берутся из задачи автономной выставки, а угол курса - из вспомогательной задачи навигации.
Качество маневра и выставки навигационной системы может быть улучшено следующими приемами:
1) использованием ДУС для оценки поворотов объекта во время маневра относительно инерциального пространства. В момент приводнения фиксируется произвольная инерциальная система координат (не связанная с горизонтом). По показаниям ДУС непрерывно решается классическая задача оценки ориентации объекта относительно зафиксированной в момент приводнения инерциальной системы координат. В эту инерциальную систему координат проектируется измеряемый в связанной системе координат вектор кажущегося ускорения, где он усредняется по времени. Вертикалью до момента окончания маневра считается направление усредненного вектора кажущегося ускорения в упомянутой произвольно фиксированной инерциальной системе координат. Использование инерциальной системы координат существенно снижает колебательность процесса и улучшает его сходимость;
2) показания ДУС могут быть использованы в законе управления для демпфирования процесса, при этом угол поворота рулей рассчитывается как:
δ=k(ϑ-ϑ*)+kωωz
где ωz - измеренная ДУС угловая скорость по каналу дифферента; kω - коэффициент демпфирования, значение которого также определяется типом управляемого объекта;
3) аналогично каналу дифферента управляемый объект может управляться по каналу крена. В этом случае углы δγ поворота рулей канала крена, при нулевом заданном угле крена γ*=0, определяются как:
δγ=kγγ+kωγωх
где: kγ - коэффициент пропорциональности для угла крена, значение которого определяется типом управляемого объекта; kωγ - коэффициент демпфирования по каналу крена, значение которого также определяется типом управляемого объекта; ωх - измеренная ДУС угловая скорость по каналу крена;
4) возможна ситуация, когда направление измеренного вектора W кажущегося ускорения совпадает с продольной осью объекта управляемого. Такое происходит, например, в начальный момент при строго отвесном входе в воду, как показано на фиг. 4. В таком случае рули следует отклонить так, чтобы они формировали максимальный поперечный момент в произвольном направлении - через доли секунды направление вектора W перестанет совпадать с продольной осью объекта и управление можно осуществлять по описанному ранее способу.
При практической реализации заявленного способа были проведены экспериментальные исследования. Полученные в результате их проведения графики, иллюстрирующие характер изменения углов дифферента и крена во времени при реализации заявленного способа (сплошная линия) и их истинные значения (пунктирная линия) приведены на фиг. 5.
Из графиков видно, что применение заявленного способа выводит сбрасываемый с носителя управляемый объект из пике на заданные углы дифферента ϑ* и крена γ* с точностью ±1° и обеспечивает выставку навигационной системы.


Изобретение относится к навигации, а именно - к способу автономной выставки бесплатформенной навигационной системы (БНС) в процессе выхода управляемого объекта из пике после приводнения на основании измерений трехосного акселерометра. Сущность заявленного способа заключается в выполнении следующих операций: задание угла дифферента ϑ*, определяющего режим планирования; задание диапазона угла дифферента и промежутка времени, определяющих выход объекта в режим планирования; непрерывное измерение вектора кажущегося ускорения W с помощью трехосного акселерометра после получения сигнала о приводнении; непрерывное вычисление текущей оценки угла дифферента ϑ управляемого объекта от плоскости, перпендикулярной измеренному вектору кажущегося ускорения W; непрерывная корректировка направления движения поворотом рулей на угол δ таким образом, чтобы совместить текущую оценку угла дифферента ϑ управляемого объекта с заданным значением угла дифферента ϑ*, при этом угол δ пропорционален разнице между текущей оценкой угла дифферента ϑ и заданным значением угла дифферента ϑ*; фиксирование вертикали, совпадающей с текущим вектором W, и завершение выставки БНС при приближении к установившемуся режиму планирования, определяемому нахождением текущей оценки угла дифферента ϑ в заданном диапазоне на протяжении заданного промежутка времени. Технический результат осуществления изобретения - создание способа автономной выставки БНС в процессе выхода управляемого объекта из пике после приводнения, позволяющего избежать столкновения с дном, и при этом оценить ориентацию объекта в пространстве с точностью, достаточной для формирования последующей траектории с помощью инерциального управления. 4 з.п. ф-лы, 5 ил.
1. Способ автономной выставки бесплатформенной навигационной системы в процессе выхода управляемого объекта из пике после приводнения включает следующие операции:
задание значения угла дифферента ϑ*, определяющего режим планирования;
задание диапазона угла дифферента и промежутка времени, определяющих выход объекта в установившийся режим планирования;
после получения сигнала о приводнении непрерывное измерение вектора кажущегося ускорения W с помощью трехосного акселерометра, неподвижно закрепленного в корпусе управляемого объекта;
непрерывное вычисление текущей оценки угла дифферента ϑ управляемого объекта от плоскости, перпендикулярной измеренному вектору кажущегося ускорения W;
непрерывную корректировку направления движения путем поворота рулей на угол δ таким образом, чтобы совместить текущую оценку угла дифферента ϑ управляемого объекта с заданным значением ϑ*:
δ=k(ϑ-ϑ*),
где: k - коэффициент пропорциональности, значение которого определяется типом управляемого объекта;
как только движение приблизится к установившемуся режиму планирования, определяемому нахождением оценки текущего угла дифферента ϑ управляемого объекта в заданном диапазоне на протяжении заданного промежутка времени, вертикаль, совпадающая с текущим вектором W, фиксируется и в дальнейшем не уточняется - выставка навигационной системы завершена.
2. Способ по п. 1 дополнительно включает:
использование показаний датчиков угловых скоростей (ДУС) для традиционной оценки ориентации управляемого объекта относительно вспомогательной инерциальной системы координат, произвольно фиксируемой в момент приводнения;
проецирование измеряемого в связанных осях вектора кажущегося ускорения W на оси вспомогательной инерциальной системы координат;
усреднение проекций вектора кажущегося ускорения W на оси вспомогательной инерциальной системы координат с помощью цифровых фильтров.
3. Способ по п. 1 дополнительно включает:
использование показаний ДУС для демпфирования процесса, при этом угол поворота рулей рассчитывается как:
δ=k(ϑ-ϑ*)+kωωz,
где: ωz - измеренная ДУС угловая скорость по каналу дифферента,
kω - коэффициент демпфирования, значение которого определяется типом управляемого объекта.
4. Способ по п. 1 дополнительно включает:
задание значения требуемого угла крена γ*;
задание диапазона угла крена и промежутка времени, определяющих выход объекта в установившийся режим движения;
после получения сигнала о приводнении, непрерывное оценивание текущего угла крена γ управляемого объекта относительно направления измеренного вектора кажущегося ускорения W;
использование ДУС для измерения угловой скорости ωх в канале крена;
непрерывное управление поворотом рулей канала крена таким образом, чтобы совместить текущую оценку угла крена γ управляемого объекта с заданным значением γ*:
δγ=kγ(γ-γ*)+kωγωх,
где: kγ - коэффициент пропорциональности для угла крена, значение которого определяется типом управляемого объекта,
kωγ - коэффициент демпфирования по каналу крена, значение которого также определяется типом управляемого объекта,
ωх - измеренная ДУС угловая скорость по каналу крена,
проверку окончания процесса по условию нахождения текущей оценки угла крена γ управляемого объекта в заданном диапазоне на протяжении заданного промежутка времени.
5. Способ по п. 1 дополнительно включает:
когда направление измеренного вектора кажущегося ускорения W совпадает с продольной осью управляемого объекта, рули отклоняют так, чтобы они формировали максимальный поперечный момент в произвольном направлении до момента времени, когда направление вектора W перестанет совпадать с продольной осью объекта.
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| СПОСОБ ВЫСТАВКИ МОРСКОЙ БИНС | 2014 |
|
RU2572651C1 |
| DE 602005027773 D1, 16.06.2011 | |||
| JP 3137438 B2, 19.02.2001. | |||
