Область техники, к которой относится изобретение
Изобретение относится к области машиностроения и может быть использовано как механизм или часть механизма, применяющегося для подъема, подвешивание грузов, создания усилия для перемещения грузов, изменения угла наклона части механизма.
Уровень техники
По совокупности существенных признаков работы механизма наиболее близким к заявляемому изобретению является механизм рычажный с неподвижной опорой и гидравлическим (пневматическим) цилиндром, где изменение угла наклона рычага, а также создание усилия на рычаге происходит за счет передвижения штока цилиндра при неподвижных его опорах.
Раскрытие сущности изобретения
В основе изобретения стоит задача создавать точные, контролируемые перемещения (наклоны, подъемы) с достаточно высокими усилиями и эффективностью.
Ключевыми компонентами изобретения являются винт и пара гайка - подвижная опора. Винт приводится во вращение приводом, пара гайка - подвижная опора приводится в движение производя перемещение рычага. Благодаря высокому кпд и точности винтовой передачи, перемещения происходят контролируемо и с высокой эффективностью.
Краткое описание чертежей
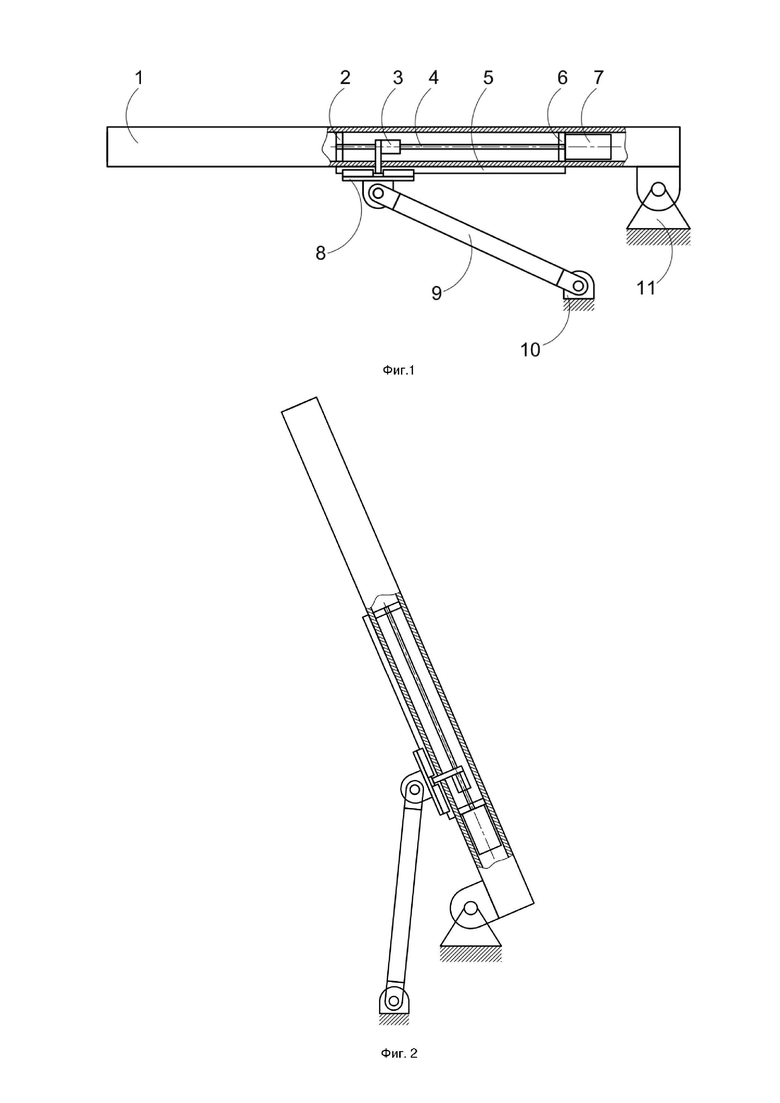
Фиг. 1 - иллюстрирует составные части механизма рычажного;
Фиг. 2 - иллюстрирует крайнее отклоненное положение механизма рычажного.
Осуществление изобретения
Механизм рычажный с винтовым приводом и подвижной опорой представлен на Фиг. 1. Внутри рычга 1 на передней и задней опоре 2 и 6 закреплен винт 4, приводящийся во вращение приводом 7, гайка 3 при вращении винта совершает поступательное движение и перемещает подвижную опору 8 вдоль линейных направляющих 5. Подвижная опора закреплена шарнирно с опорным рычагом 9. Неподвижные опоры 10 и 11 шарнирно крепят рычаги 1 и 9.
Вследствие вращения винта приводом происходит перемещение пары гайка-подвижная опора и отклонение рычага, на Фиг. 2 изображено крайнее поднятое положение механизма рычажного.
Линейные направляющие закреплены жестко на рычаге и воспринимают возникающие нагрузки от опорного рычага и подвижной опоры, разгружая винтовую передачу.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ РЫЧАЖНЫЙ ПОДЪЕМА И ФИКСАЦИИ С ДЕМПФИРУЮЩИМ УСТРОЙСТВОМ | 2023 |
|
RU2818320C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2393986C2 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| Устройство для подъема груза | 1990 |
|
SU1794884A1 |
| ВНУТРИТРУБНЫЙ МАНИПУЛЯТОР | 1990 |
|
SU1739729A1 |
| ГИДРОДОМКРАТ С ФУНКЦИЕЙ ВИНТОВОЙ ОПОРЫ | 2014 |
|
RU2562677C1 |
| СТЕКЛОПОДЪЕМНИК С ЭВАКУАЦИОННЫМ ОТКРЫВАНИЕМ СТЕКЛА ДЛЯ БРОНЕАВТОМОБИЛЕЙ | 2020 |
|
RU2736663C1 |
| Вилы погрузчика | 1986 |
|
SU1390181A1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2792906C1 |
| Судовой (корабельный) подъемник с одновинтовым приводом | 2018 |
|
RU2691561C1 |
Изобретение относится к области машиностроения, а более конкретно к приводам. Винтовой механизм состоит из пары винт-гайка с опорами и приводом, расположенными внутри рычага. Имеются линейные направляющие вдоль оси рычага, подвижная опора, перемещающаяся по линейным направляющим и имеющая зацепление с гайкой винтовой пары. Подвижная опора закреплена шарнирно с опорным рычагом. Достигается возможность производить контролируемые наклоны и подъемы с достаточно высокими усилиями и эффективностью. 2 ил.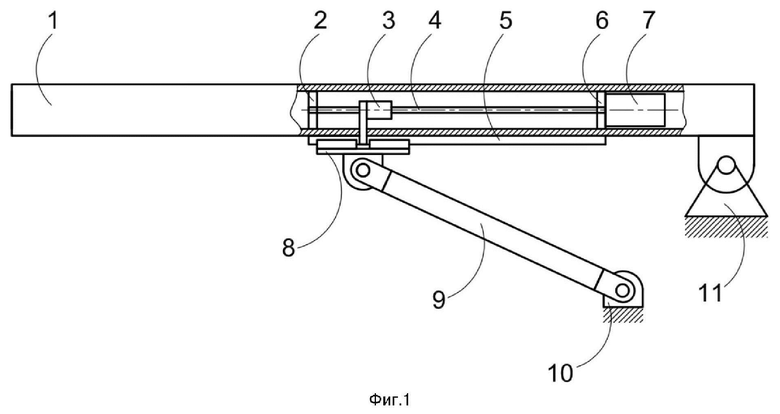
Винтовой механизм, состоящий из пары винт-гайка с опорами и приводом, расположенными внутри рычага, с линейными направляющими вдоль оси рычага, подвижной опорой, перемещающейся по линейным направляющим и имеющей зацепление с гайкой винтовой пары, подвижная опора закреплена шарнирно с опорным рычагом.
| РЫЧАЖНО-ВИНТОВОЙ ПРИВОД | 0 |
|
SU386189A1 |
| МЕХАНИЗМ ВЫДВИЖЕНИЯ ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛЫ | 1995 |
|
RU2083471C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛОРГИДРАТА ПИРИДОКСИНА | 0 |
|
SU196854A1 |
| Винтовая передача | 1987 |
|
SU1441122A1 |
| US 2008216597 A1, 11.09.2008 | |||
| КОМБИНИРОВАННЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1991 |
|
RU2013200C1 |
