Данное изобретение относится к датчикам угловой скорости на базе динамически настраиваемого гироскопа, а конкретно к способу уменьшения погрешности вызванной угловым ускорением в смежном канале.
Динамически настраиваемый гироскоп (ДНГ) имеет внутренний карданов подвес, который изнутри крепится торсионами к валу электродвигателя, а снаружи торсионами к маховику. В современных ДНГ узел подвеса изготавливается из цельной заготовки электроэрозионным способом для обеспечения монолитного задела торсионов. Датчики угла и момента расположены вблизи ротора. Так как ротор закреплен консольно на валу двигателя, он менее подвержен действию тепловых полей и имеет более стабильное положение центра масс. Такие конструктивные особенности обуславливают меньшие габариты относительно классического датчика угловой скорости (ДУС). Момент трения в подвесе проявляется только в результате внутреннего трения упругих торсионов, что гораздо меньше момента трения без смазочного материала. Кроме того, такой момент сравним с моментом трения со смазочным материалом. Из вышесказанного можно сделать вывод о том, что погрешность такого прибора меньше погрешности классического ДУСа наряду с более высокой стабильностью показаний. Однако момент между ротором и валом в гироскопе снижается за счет динамической настройки, т.е. в подборе таких параметров торсионов, внутренних колец и величины угловой скорости ротора, чтобы жесткость торсионов на скручивание компенсировалась (в среднем за оборот) динамическим опрокидывающим моментом кольца (резонанс).
Отклонение ротора от начального положения регистрируется датчиком угла (ДУ) и компенсируется датчиком момента (ДМ) замкнутого через усилитель обратной связи на ДУ. Выходным сигналом гироскопа, снимаемым с ДМ, является напряжение, величина которого характеризует угловую скорость вращения основания, а знак - направление вращения.
При воздействии углового ускорения по одной из измерительных осей ДНГ, в смежном измерительном канале датчика детектируются ложные измерения. Причиной появления погрешностей в выходном сигнале при изменении угловой скорости основания является изменение наклона ротора относительно его оси, что необходимо для изменения тока в датчике момента. При этом амплитуда резонансных колебаний ротора на оси не соответствует наклону оси и на время установления нового уровня колебаний упругость подвеса не компенсируется кинетическими моментами ротора, что приводит к возникновению сигнала по другой оси ДНГ.
Известен датчик угловой скорости [1], содержащий корпус, динамически настроенный ротор и два канала измерения, каждый из которых содержит усилитель, преобразователь угла и преобразователь момента с измерителем тока, которые выполняют функции датчиков угла и момента гироскопа соответственно.
Наиболее близким по техническому решению является датчик угловой скорости на базе динамически настраиваемого гироскопа [2]. Недостатком является неэффективность компенсации при воздействии по двум осям.
Технический результат изобретения заключается в повышении достоверности выходной информации ДНГ за счет устранения погрешности измерения угловой скорости, зависящей от углового ускорения в смежном канале и, как следствие, повышении точностных характеристик ДУС на базе ДНГ.
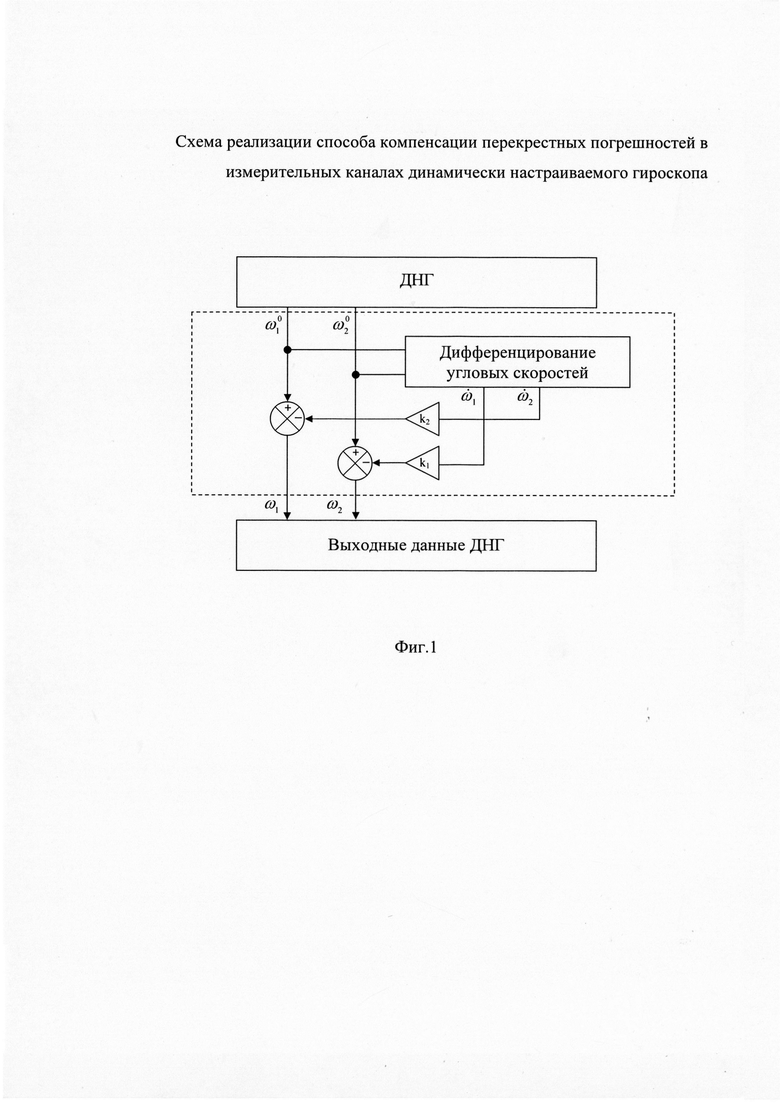
Технический результат достигается за счет того, что измеренные угловые скорости по первому и второму каналам ДУС на базе динамически настраиваемого гироскопа подают на первые входы сумматоров, а на второй вход сумматора первого канала подают угловое ускорение второго канала, а на второй вход сумматора второго канала подают угловое ускорение первого канала, причем угловые ускорения полученные в ходе дифференцированияизмеренных угловых скоростей первого и второго каналов приводятся к масштабу угловых скоростей с помощью соответствующих коэффициентов перекрестных связей. Далее в каждом сумматоре осуществляют компенсацию угловой скорости соответствующего канала ДУС с привлечением углового ускорения смежного канала ДУС. В результате на выходе получают скомпенсированные угловые скорости каждого канала ДУС на базе динамически настраиваемого гироскопа.
Данный способ реализации представлен на фиг. 1, где  - измеренные угловые скорости по соответствующим каналам датчика;
- измеренные угловые скорости по соответствующим каналам датчика;  - угловые ускорения (получены дифференцированием угловых скоростей); k1, k2 - коэффициенты перекрестных связей для приведения угловых ускорений к масштабу угловых скоростей; ω1, ω2 - компенсированные угловые скорости.
- угловые ускорения (получены дифференцированием угловых скоростей); k1, k2 - коэффициенты перекрестных связей для приведения угловых ускорений к масштабу угловых скоростей; ω1, ω2 - компенсированные угловые скорости.
Источники информации
1. "Динамически настраиваемые гироскопы." Д.С. Пельпор, В.А. Матвеев, В.Д. Арсеньев. "Машиностроение", Москва, 1988 г., стр. 249-252.
2. Патент РФ №2809028, МПК G01С 19/02, 2006 г., СПК G01С 19/02, 2019 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов | 2024 |
|
RU2829634C1 |
| Датчик угловой скорости на базе динамически настраиваемого гироскопа | 2018 |
|
RU2709028C1 |
| Датчик угловой скорости на базе динамически настраиваемого гироскопа | 2019 |
|
RU2734277C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2457493C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
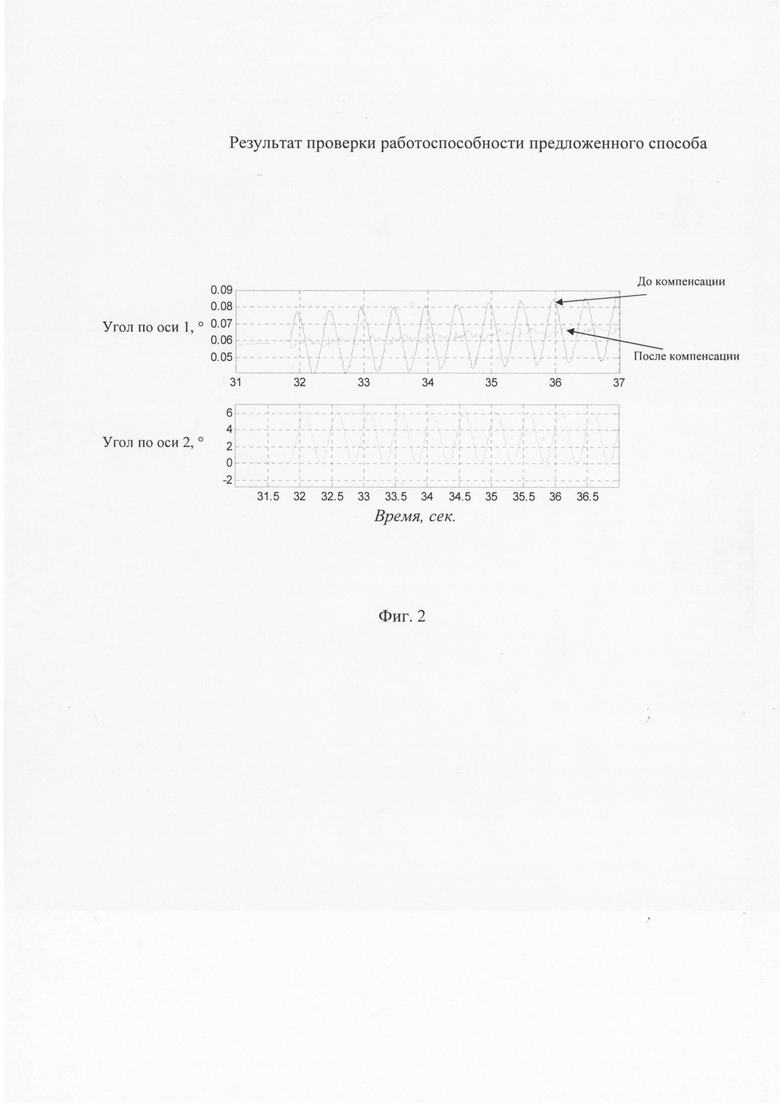
Изобретение относится к области приборостроения и может быть использовано в устройствах, использующих датчики угловых скоростей (ДУС) на базе динамически настраиваемого гироскопа (ДНГ). Способ уменьшения перекрестных погрешностей выходной информации ДУС на базе ДНГ, вызванных воздействием угловых ускорений, характеризуется тем, что измеряют угловые скорости по первому и второму каналам ДУС на базе ДНГ и подают их на первые входы сумматоров, на второй вход сумматора первого канала подают угловое ускорение второго канала. На второй вход сумматора второго канала подают угловое ускорение первого канала, причем угловые ускорения получены в ходе дифференцирования измеренных угловых скоростей первого и второго каналов и приведены к масштабу угловых скоростей с помощью соответствующих коэффициентов перекрестных связей. Далее в каждом сумматоре осуществляют компенсацию угловой скорости соответствующего канала ДУС с привлечением углового ускорения смежного канала ДУС, на выходе получают скомпенсированные угловые скорости каждого канала ДУС на базе ДНГ. Технический результат – повышение точностных характеристик ДУС на базе ДНГ. 2 ил.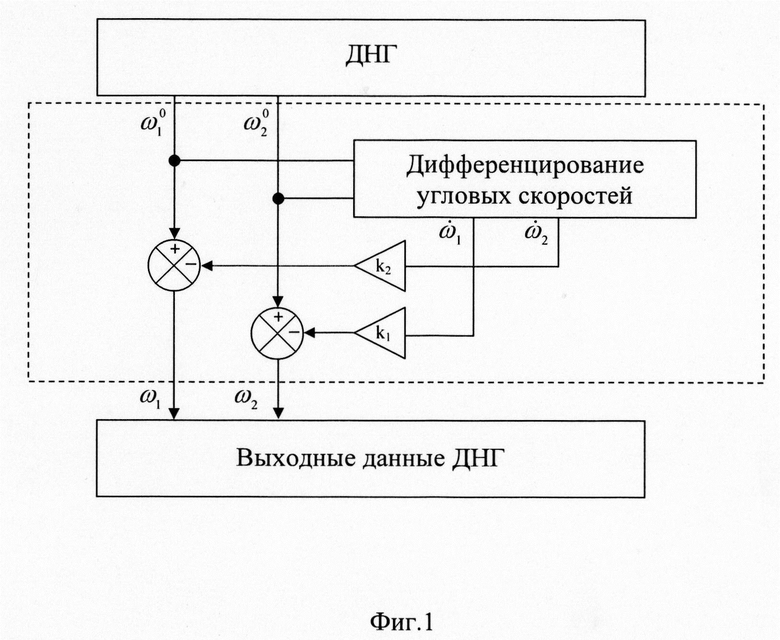
Способ уменьшения перекрестных погрешностей выходной информации датчика угловых скоростей (ДУС) на базе динамически настраиваемого гироскопа, вызванных воздействием угловых ускорений, характеризующийся тем, что измеряют угловые скорости по первому и второму каналам ДУС на базе динамически настраиваемого гироскопа и подают их на первые входы сумматоров, на второй вход сумматора первого канала подают угловое ускорение второго канала, а на второй вход сумматора второго канала подают угловое ускорение первого канала, причем угловые ускорения получены в ходе дифференцирования измеренных угловых скоростей первого и второго каналов и приведены к масштабу угловых скоростей с помощью соответствующих коэффициентов перекрестных связей, далее в каждом сумматоре осуществляют компенсацию угловой скорости соответствующего канала ДУС с привлечением углового ускорения смежного канала ДУС, на выходе получают скомпенсированные угловые скорости каждого канала ДУС на базе динамически настраиваемого гироскопа.
| Датчик угловой скорости на базе динамически настраиваемого гироскопа | 2018 |
|
RU2709028C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
