Область техники
Настоящее изобретение относится к системе для измерения проскальзывания шины относительно обода, на котором смонтирована упомянутая шина.
В частности, система содержит первое электронное устройство, применяемое при использовании на внутренней поверхности шины, второе электронное устройство, применяемое при использовании на ободе, например в выемке обода, а также блок обработки (внешний по отношению к упомянутым электронным устройствам), причем упомянутая система выполнена с возможностью измерения проскальзывания по времени шины относительно обода, когда шина эксплуатируется, на основании изменения угла, между первой осью (проходящей через центр шины и точку применения первого электронного устройства на шине) и второй осью (проходящей через центр шины и точку применения второго электронного устройства на ободе), относительно угла приведения.
Следовательно, мера проскальзывания является динамической мерой.
Каждое электронное устройство выполнено с возможностью по меньшей мере получения данных, фильтровать и сохранять упомянутые данные, а также отправлять их на упомянутый блок обработки, и упомянутый блок обработки выполнен с возможностью по меньшей мере получения данных, отправленных упомянутыми электронными устройствами и обрабатывать упомянутые данные для измерения проскальзывания между шиной и ободом.
Выражение «проскальзывание» означает изменение угла между первой осью, проходящей через центр шины и первую точку, совпадающую с точкой внутренней поверхности шины, где применяется первое электронное устройство, и второй осью, проходящей через центр шины и вторую точку, совпадающую с точкой обода, где применяется второе электронное устройство, относительно угла приведения.
Настоящее изобретение также относится к способу измерения проскальзывания шины относительно обода, на котором смонтирована упомянутая шина.
Уровень техники
Как известно, в секторе механических транспортных средств, в частности в секторе сельскохозяйственных транспортных средств, проскальзывание одной или более шин относительно соответствующих ободов (на каждом из которых смонтирована шина), может приводить к значительному повреждению шин и нарушению целостности упомянутых шин при использовании.
Таким образом, проскальзывание шины относительно обода создает угрозу безопасности пользователей.
В секторе сельскохозяйственных транспортных средств, проскальзывание шины относительно обода допустимо в определенных пределах, в случае превышения которых проскальзывание обуславливает необратимые повреждения шины и/или обода.
Следовательно, необходимо отслеживать проскальзывание шины относительно обода, чтобы поврежденные шины не нужно было заменять.
В настоящее время известно устройство для отслеживания работы шины, содержащей устройство обнаружения проскальзывания.
Упомянутое устройство обнаружения содержит:
источник света,
колориметрический датчик, и
кольцевую поверхность, состоящую из множества секторов, в которой последовательные секторы имеют разные цвета, и каждый сектор имеют длину, которая стягивает заданный угол, равный заданному угловому разрешению проскальзывания.
Колориметрический датчик располагается внутри полости и способен обнаруживать цвет света, испускаемого упомянутым источником света и отраженного одним из секторов кольцевой поверхности.
Колориметрический датчик и источник света могут быть объединены с ободом, и кольцевая поверхность может быть объединена с шиной или наоборот.
В любом случае, при наличии проскальзывания шины относительно обода, колориметрический датчик будет обнаруживать цвет света, отраженного сектором, измеряя протяженность проскальзывания.
Однако упомянутое измерительное устройство имеет некоторые недостатки.
Первый недостаток упомянутого устройства обнаружения обусловлен тем, что обнаружение упомянутого колориметрического датчика может подвергаться влиянию любых остатков грязи, пыли или присутствия воды, которая может поступать в упомянутую полость.
Второй недостаток, связанный с присутствием остатков грязи, пыли или капель воды, обусловлен тем, что характеристики окрашенных секторов могут подвергаться влиянию.
Дополнительный недостаток обусловлен необходимостью обеспечивать источник света для освещения внутренней поверхности шины и средство подачи питания для подачи питания на упомянутый источник света, благодаря чему конструкция упомянутого устройства обнаружения является сложной конструкцией.
Другие системы для измерения проскальзывания шины относительно обода, на котором смонтирована упомянутая шина, раскрыты, например, в документах WO 2016/151544 A1, JP 2007-278801 A и FR 3042281 A1.
Сущность изобретения
Целью настоящего изобретения является преодоление упомянутых недостатков, обеспечение системы и способа измерения проскальзывания по времени шины относительно обода, на котором смонтирована упомянутая шина, когда шина эксплуатируется, во избежание преждевременного износа шины, в частности в соответствии с бортом шины (т.е. площадью контакта между ободом и шиной).
Фактически, проскальзывание шины относительно обода с течением времени обуславливает износ борта шины, и это обуславливает повреждение шины.
Таким образом, задачей изобретения является система для измерения проскальзывания между шиной и ободом, на котором смонтирована упомянутая шина, причем упомянутая система содержит:
- первое электронное устройство, подлежащее размещению, при использовании, в контакте с внутренней поверхностью шины,
- второе электронное устройство, подлежащее размещению, при использовании, в контакте с упомянутым ободом,
- блок обработки, внешний по отношению к упомянутым электронным устройствам, причем
первая система координат x1, y1, z1 связана с первым электронным устройством таким образом, что ось x1 является касательной к траектории кругового движения первой точки, которая является точкой упомянутой шины в которой упомянутое первое электронное устройство применяется, и ось z1 перпендикулярна к упомянутой оси x1,
вторая система координат x2, y2, z2 связана со вторым электронным устройством таким образом, что ось x2 является касательной к траектории кругового движения второй точки, которая является точкой упомянутого обода в котором упомянутое второе электронное устройство применяется, и ось z2 перпендикулярна к упомянутой оси x2,
причем первое электронное устройство выполнено с возможностью по меньшей мере отправки данных на упомянутый блок обработки и содержит внутри:
- первый блок инерциальных измерений, содержащий первый гироскоп и первый акселерометр и выполненный с возможностью:
получать, посредством упомянутого первого гироскопа, значение по меньшей мере одной угловой скорости вокруг оси y, и, посредством упомянутого первого акселерометра, значение по меньшей мере одного линейного ускорения вдоль оси x,
- первое средство хранения для хранения данных,
- первый логический блок управления, соединенный с упомянутым первым инерциальным измерением и с упомянутым первым средством хранения, и выполненный с возможностью
принимать от первого блока инерциальных измерений значение упомянутой по меньшей мере одной угловой скорости вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x,
фильтровать посредством первого цифрового фильтра значение упомянутой по меньшей мере одной угловой скорости вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x для получения по меньшей мере одного отфильтрованного углового ускорения вдоль оси x,
идентифицировать каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно заданному значению,
сохранять в упомянутом первом средстве хранения:
каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению, и
значение упомянутой отфильтрованной угловой скорости вокруг оси y в каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
отправлять на упомянутый блок обработки:
моменты времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
значение упомянутой отфильтрованной угловой скорости вокруг оси y в упомянутые моменты времени.
Упомянутое второе электронное устройство выполнено с возможностью по меньшей мере отправки данных на упомянутый блок обработки и содержит внутри:
- второй блок инерциальных измерений, содержащий второй гироскоп и второй акселерометр и выполненный с возможностью:
получать, посредством упомянутого второго гироскопа, значение по меньшей мере угловой скорости вокруг оси y), и, посредством упомянутого второго акселерометра, значение по меньшей мере линейного ускорения вдоль оси x,
- второе средство хранения для хранения данных,
- второй логический блок управления, подключенный к упомянутому второму блоку инерциальных измерений и к упомянутому второму средству хранения, и выполненный с возможностью:
принимать от второго блока инерциальных измерений упомянутого второго электронного устройства, значение упомянутой по меньшей мере одной угловой скорости вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x,
фильтровать посредством второго цифрового значения упомянутой по меньшей мере одной угловой скорости вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x для получения по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x,
идентифицировать каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
сохранять в упомянутом втором средстве хранения:
каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
значение упомянутой отфильтрованной угловой скорости вокруг оси y в каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
отправлять на упомянутый блок обработки:
дополнительные моменты времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
значение упомянутой отфильтрованной угловой скорости вокруг оси y в упомянутые дополнительные моменты времени.
Блок обработки выполнен с возможностью по меньшей мере принимать данные от упомянутого первого электронного устройства и от упомянутого второго электронного устройства и содержит внутри:
- третье средство хранения, в котором хранится значение угла αref приведения,
- третий логический блок управления, подключенный к упомянутому третьему средству хранения, и выполненный с возможностью:
принимать значение упомянутой отфильтрованной по меньшей мере одной угловой скорости вокруг оси y, связанной с первым электронным устройством, и каждый момент времени, когда значение упомянутого по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x, связанной с первым электронным устройством, равно упомянутому заданному значению,
принимать значение упомянутой по меньшей мере одной отфильтрованной угловой скорости вокруг оси y, связанной со вторым электронным устройством, и каждый дополнительный момент времени, когда значение упомянутого по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x, связанной со вторым электронным устройством равно упомянутому заданному значению,
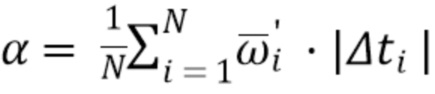
вычислять угол между первой осью и второй осью, причем упомянутая первая ось является осью, проходящей через центр шины и упомянутую первую точку, и упомянутая вторая ось является осью, проходящей через центр шины и упомянутую вторую точку, согласно следующей формуле:
где
 - количество интервалов
- количество интервалов  времени,
времени,
 - среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости вокруг оси y в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x равно заданному значению, и из значения отфильтрованной угловой скорости вокруг оси y в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x равно упомянутому заданному значению,
- среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости вокруг оси y в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x равно заданному значению, и из значения отфильтрованной угловой скорости вокруг оси y в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x равно упомянутому заданному значению,
- соответствующий интервал  ,
,  , …
, …  времени заданный моментом
времени заданный моментом  ,
,  , …
, …  времени, в котором отфильтрованное линейное ускорение вдоль оси x равно соответствующему заданному значению, и дополнительный момент
времени, в котором отфильтрованное линейное ускорение вдоль оси x равно соответствующему заданному значению, и дополнительный момент  ,
,  , …
, …  времени, в котором отфильтрованное линейное ускорение вдоль оси x равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала
времени, в котором отфильтрованное линейное ускорение вдоль оси x равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала  времени в течение которого участок упомянутой шины входит в контакт с землей и затем теряет контакт с землей,
времени в течение которого участок упомянутой шины входит в контакт с землей и затем теряет контакт с землей,
сравнивать вычисленное значение угла со значением угла αref приведения, хранящегося в упомянутом третьем средстве хранения,
если значение угла отличается от значения угла αref приведения, вычислять разность между значением угла и значением угла αref для измерения проскальзывания шины относительно обода.
Дополнительные предпочтительные варианты осуществления системы раскрыты в зависимых пунктах формулы изобретения.
Настоящее изобретение относится также к способу измерения проскальзывания между шиной и ободом, на котором смонтирована упомянутая шина, посредством системы посредством вышеупомянутой системы.
Упомянутый способ содержит следующие этапы:
A) получение значения по меньшей мере одной угловой скорости вокруг оси y и значения по меньшей мере одного линейного ускорения вдоль оси x, связанной с упомянутым первым электронным устройством,
B) фильтрация посредством первого цифрового фильтра значения упомянутой по меньшей мере одной угловой скорости вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y и значения упомянутого по меньшей мере одного линейного ускорения вдоль оси x для получения по меньшей мере одного отфильтрованного углового ускорения вдоль оси x,
C) идентификация каждого момента времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно заданному значению,
D) сохранение:
каждого момента времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению, и
значения упомянутой отфильтрованной угловой скорости вокруг оси y в каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
E) получение значения упомянутой по меньшей мере одной угловой скорости вокруг оси y и значения упомянутого по меньшей мере одного линейного ускорения вдоль оси x, связанной с упомянутым вторым электронным устройством,
F) фильтрация посредством второго цифрового фильтра значения упомянутой по меньшей мере одной угловой скорости вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y и значения упомянутого по меньшей мере одного линейного ускорения вдоль оси x для получения по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x,
G) идентификация каждого дополнительного момента времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
H) сохранение:
каждого дополнительного момента времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
значения упомянутой отфильтрованной угловой скорости вокруг оси y в каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения вдоль оси x равно упомянутому заданному значению,
I) вычисление угла (α) согласно следующей формуле:
где
- количество интервалов времени,
- среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости вокруг оси y в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x равно заданному значению, и из значения отфильтрованной угловой скорости вокруг оси y в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x равно упомянутому заданному значению,
- соответствующий интервал , , … времени, заданный моментом , , … времени, в котором отфильтрованное линейное ускорение вдоль оси x, связанной с первым электронным устройством, равно соответствующему заданному значению, и дополнительный момент , , …  времени, в котором отфильтрованное линейное ускорение вдоль оси x связанное со вторым электронным устройством равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала времени в течение которого участок упомянутой шины входит в контакт с землей и затем теряет контакт с землей,
времени, в котором отфильтрованное линейное ускорение вдоль оси x связанное со вторым электронным устройством равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала времени в течение которого участок упомянутой шины входит в контакт с землей и затем теряет контакт с землей,
J) сравнение вычисленного значения угла со значением угла αref приведения,
K) если значение угла отличается от значения угла αref приведения, вычисление разности между значением угла и значением угла αref для измерения проскальзывания шины относительно обода.
Краткое описание чертежей
Настоящее изобретение будет описано далее, в целях иллюстрации, но не ограничения, согласно его варианту осуществления, с конкретной ссылкой на прилагаемые чертежи, на которых:
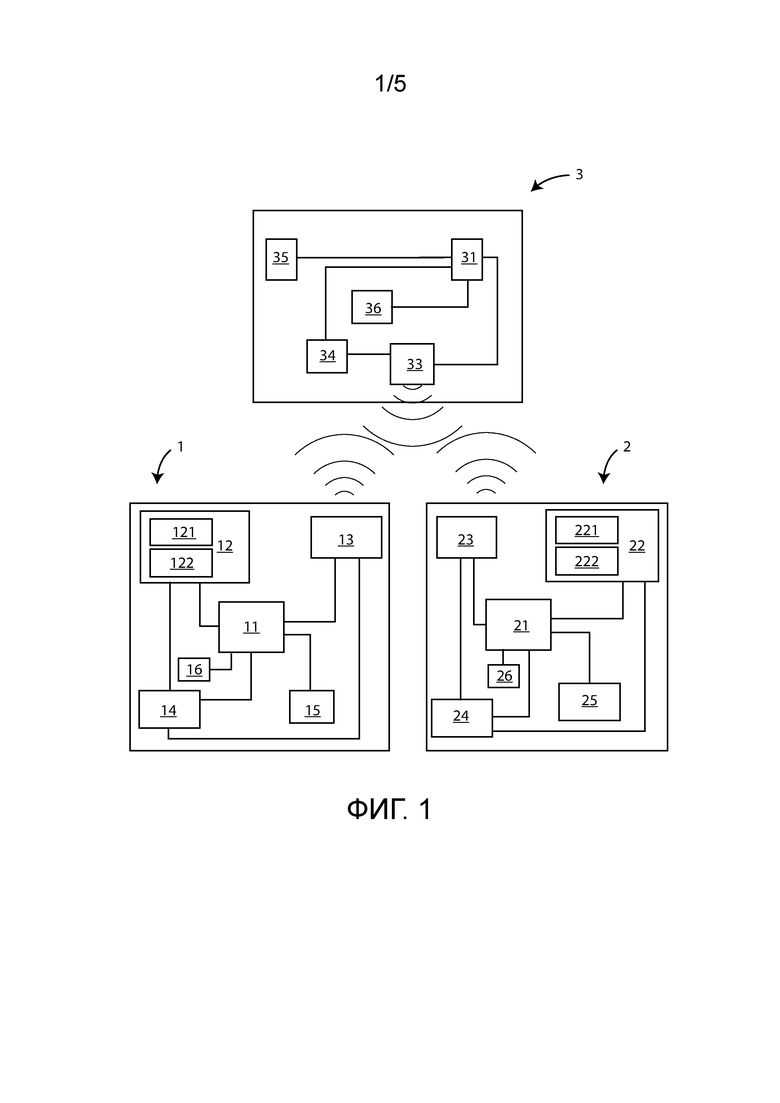
фиг. 1 - схема компонентов системы изобретения, содержащей первое электронное устройство, второе электронное устройство и блок обработки, внешний по отношению к упомянутым электронным устройствам;
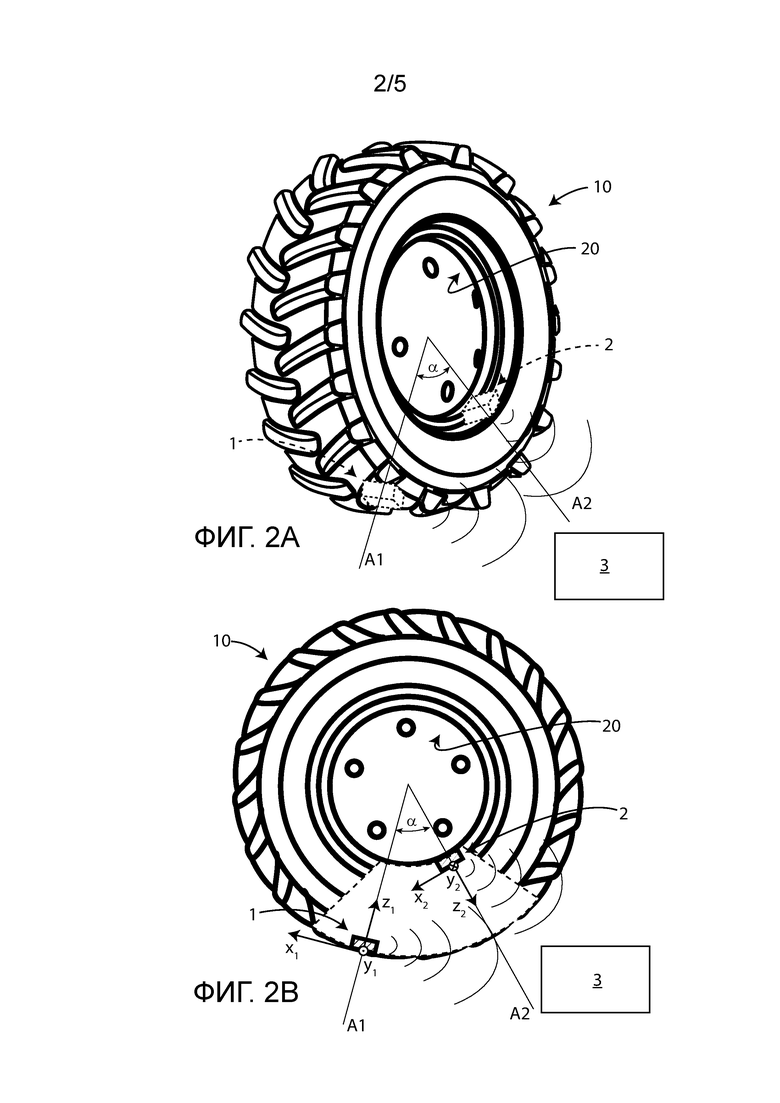
фиг. 2A - схематический вид в перспективе колеса, содержащего шину и обод, на которой смонтирована шина, демонстрирующий первое электронное устройство, размещенное внутри шины таким образом, чтобы контактировать с внутренней поверхностью самой шины, второе электронное устройство, размещенное в выемке упомянутого обода, и блок обработки;
фиг. 2B - вид сбоку колеса с фиг. 2A;
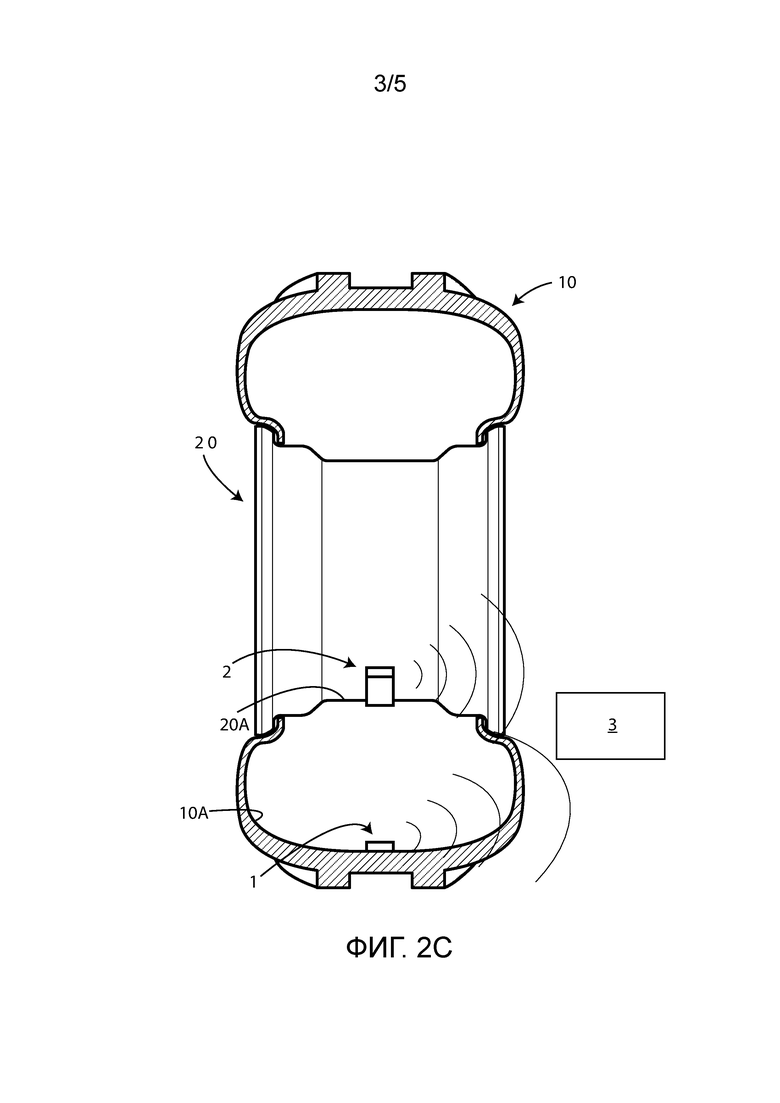
фиг. 2C - вид спереди частично в разрезе колеса с фиг. 2A;
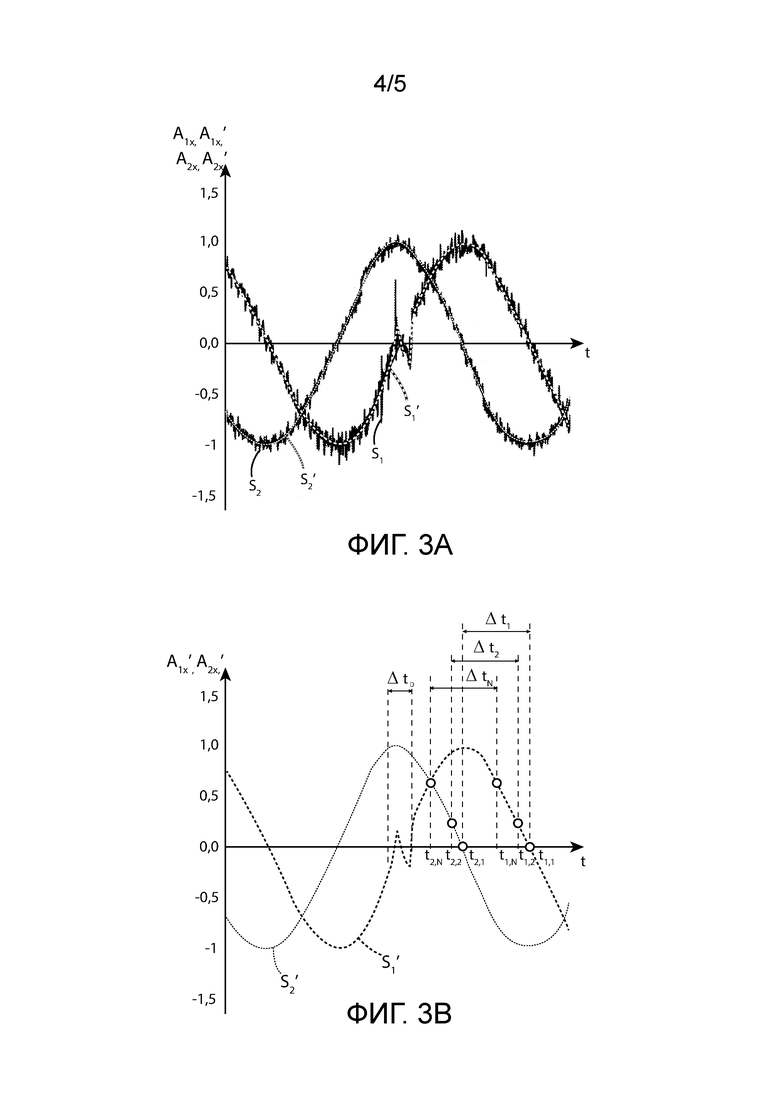
фиг. 3A - две синусоиды в координатной плоскости, представляющие линейное ускорение вдоль оси x, связанной с первым электронным устройством по времени соответственно до и после применения первого БИХ-фильтра, когда используется первое электронное устройство, и две дополнительные синусоиды, представляющие линейное ускорение вдоль оси x, связанной со вторым электронным устройством по времени, соответственно до и после применения второго БИХ-фильтра, когда используется второе электронное устройство;
фиг. 3B - подробный график в координатной плоскости синусоиды, представляющей отфильтрованное линейное ускорение вдоль оси x, связанной с первым электронным устройством, и синусоиды, представляющей отфильтрованное линейное ускорение вдоль оси x, связанной со вторым электронным устройством;
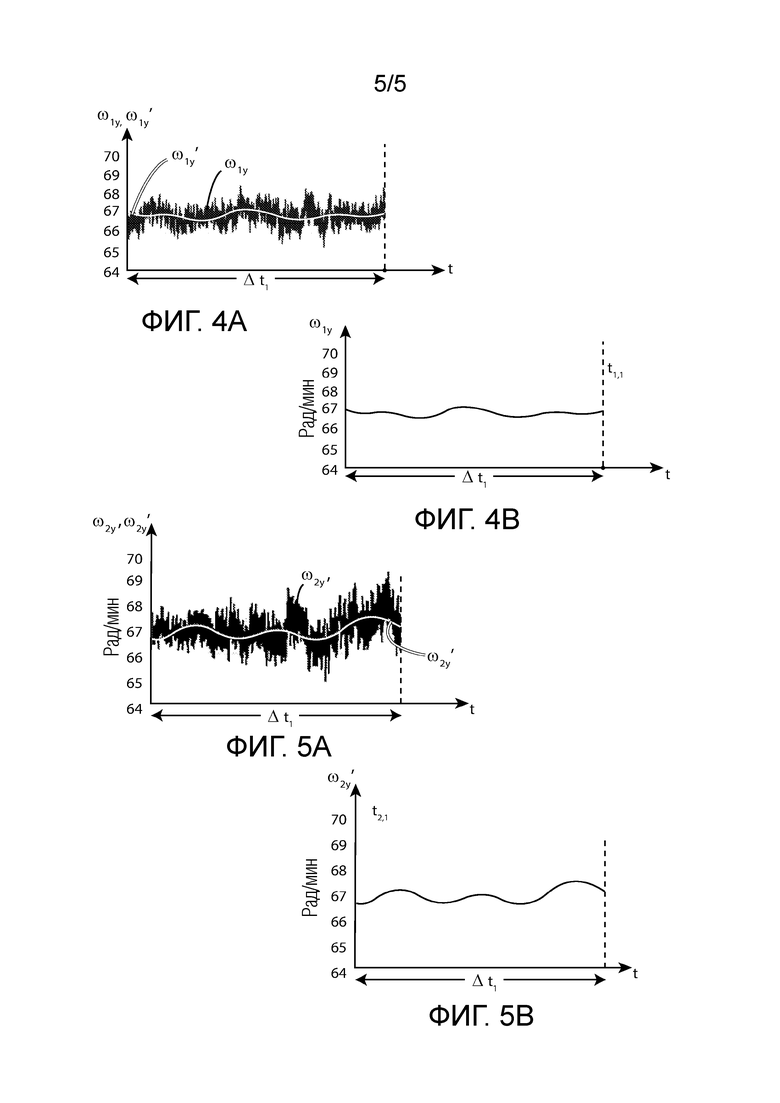
фиг. 4A - два участка синусоид, представляющих угловую скорость вокруг оси y, связанной с первым электронным устройством, в интервале времени, соответственно до и после применения первого БИХ-фильтра, когда используется первое электронное устройство;
фиг. 4B - синусоида в координатной плоскости, представляющая отфильтрованную угловую скорость вокруг оси y, связанной с первым электронным устройством, в упомянутом интервале времени;
фиг. 5A - два участка синусоид, представляющих угловую скорость вокруг оси y, связанной со вторым электронным устройством, в интервале времени, соответственно до и после применения второго БИХ-фильтра, когда используется второе электронное устройство;
фиг. 5B - участок синусоиды в координатной плоскости, представляющей отфильтрованную угловую скорость вокруг оси y, связанной со вторым электронным устройством, в упомянутом интервале времени.
Подробное описание изобретения
Согласно фиг. 1, 2A, 2B, 2C система для измерения проскальзывания между шиной 10 и ободом 20, на котором смонтирована упомянутая шина 10,
содержит:
- первое электронное устройство 1, подлежащее размещению, при использовании, в контакте с внутренней поверхностью 10A шины 10,
- второе электронное устройство 2, подлежащее размещению, при использовании, на ободе 20, в частности, в раскрытом варианте осуществления, в выемке 20A обода 20, и
- блок 3 обработки, внешний по отношению к упомянутым электронным устройствам 1, 2.
В раскрытом варианте осуществления, первая система координат x1, y1, z1 связана с первым электронным устройством 1 таким образом, что ось x1 является касательной к траектории кругового движения первой точки, которая является точкой упомянутой шины 10, в которой применяется упомянутое первое электронное устройство 1, и ось z1 перпендикулярна к упомянутой оси x1, и вторая система координат x2, y2, z2 связана со вторым электронным устройством 2 таким образом, что ось x2 является касательной к траектории кругового движения второй точки, которая является точкой упомянутого обода 20 в котором упомянутое второе электронное устройство 2 применяется, и ось z2 перпендикулярна к упомянутой оси x2.
Ось x1 и ось z1 первой системы координат задают первую плоскость.
Ось x2 и ось z2 второй системы координат задают вторую плоскость.
В раскрытом варианте осуществления, упомянутая вторая плоскость параллельна или по существу параллельна упомянутой первой плоскости.
Однако, хотя это не показано на чертежах, упомянутая первая плоскость и упомянутая вторая плоскость могут совпадать.
Проскальзывание между шиной 10 и ободом 20 измеряется изменением угла α относительно угла αref приведения, причем угол α является углом между первой осью A1, проходящей через центр шины 10 и первую точку, которая является точкой применения первого электронного устройства 1 на внутренней поверхности 10A шины 10 и второй осью A2, проходящей через центр шины 10 и вторую точку, которая является точкой применения второго электронного устройства 2 в выемке 20A обода 20.
Заданное значение связана со значением угла αref приведения, когда первое электронное устройство 1 и второе электронное устройство 2 располагаются соответственно на внутренней поверхности 10A шины 10 и в выемке 20A обода 20.
Изменение значения этого угла по времени представляет проскальзывание шины 10 относительно обода 20 по времени.
Со ссылкой на первое электронное устройство 1, упомянутое первое электронное устройство 1 содержит внутри:
- первое средство 14 подачи питания для подачи питания на упомянутое первое электронное устройство 1,
- первый беспроводной приемопередающий модуль 13 для передачи и приема сигналов/данных на/от упомянутого блока 3 обработки,
- первый блок 12 инерциальных измерений, содержащий первый гироскоп 121 и первый акселерометр 122 и выполненный с возможностью:
получать, посредством упомянутого первого гироскопа 121, значение по меньшей мере одной угловой скорости ω1y вокруг оси y,
получать, посредством упомянутого первого акселерометра 122, значение по меньшей мере одного линейного ускорения A1x вдоль оси x, причем, в раскрытом варианте осуществления, значение упомянутого линейного ускорения A1x вдоль оси x является нормализованным значением относительно единичного значения (т.е. значение линейного ускорения A1x вдоль оси x составляет от -1 до +1),
- первое средство 15 хранения для хранения данных,
- первый логический блок 11 управления, соединенный с упомянутым первым блоком 12 инерциального измерения и с упомянутым первым средством 15 хранения, и выполненный с возможностью:
принимать от первого блока 12 инерциальных измерений значение упомянутой по меньшей мере одной угловой скорости ω1y вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения A1x вдоль оси x,
фильтровать посредством первого цифрового фильтра значение упомянутой по меньшей мере одной угловой скорости ω1y вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости ω1y’ вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения A1x вдоль оси x для получения по меньшей мере одного отфильтрованного углового ускорения A1x’ вдоль оси x,
идентифицировать каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно заданному значению,
сохранять в упомянутом первом средстве 15 хранения:
каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно упомянутому заданному значению, и
значение упомянутой отфильтрованной угловой скорости ω1y’ вокруг оси y в каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно упомянутому заданному значению,
отправлять на упомянутый блок 3 обработки:
моменты времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно упомянутому заданному значению,
значение упомянутой отфильтрованной угловой скорости ω1y’ вокруг оси y в упомянутые моменты времени.
Со ссылкой на первый цифровой фильтр, в раскрытом варианте осуществления, упомянутый цифровой фильтр является первым БИХ-фильтром (с бесконечной импульсной характеристикой).
В частности, предпочтительно, чтобы упомянутый первый БИХ-фильтр имел частоту от 0,1 Гц до 1 Гц.
Первый логический блок 11 управления может быть выполнен с возможностью отправки на блок 3 обработки упомянутых моментов времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно упомянутому заданному значению, и значения упомянутой по меньшей мере одной отфильтрованной угловой скорости ω1y’ вокруг оси y в упомянутые моменты времени, когда шина 10 совершила заданное первое количество оборотов.
Преимущественно, передача данных на блок 3 обработки первым электронным устройством 1 после заданного первое количества оборотов позволяет обеспечивать энергосбережение.
В описанном варианте осуществления, ссылка будет сделана на заданное значение для отфильтрованного линейного ускорения A1x’ вдоль оси x, связанной с первым электронным устройством 1, равное нулю, и, как упомянуто ниже, со ссылкой на второе электронное устройство 2, ссылка будет сделана на заданное значение для отфильтрованного линейного ускорения A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равное нулю (так называемый «метод прохождения через нуль»).
Однако можно выбрать заданное значение (оба для отфильтрованного линейного ускорения A1x’ вдоль оси x, связанной с первым электронным устройством 1 и для отфильтрованного линейного ускорения A2x’ вдоль оси x, связанной со вторым электронным устройством 2) равное значение, отличное от нуля (но в пределах от -1 до +1), без отклонения от объема изобретения.
Каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно нулю соответствует моментам времени, когда первая отфильтрованная синусоида S1’, связанная с упомянутым по меньшей мере одним отфильтрованным линейным ускорением A1x’ вдоль оси x первого электронного устройства 1 изменяет знак, (что можно видеть на фиг. 3A и 3B, объясненные ниже).
Первая синусоида S1 и первая отфильтрованная синусоида S1’ демонстрируют, соответственно, как линейное ускорение A1x вдоль оси x и отфильтрованное линейное ускорение A1x’ вдоль оси x, каждое из которых связано с первым электронным устройством 1, изменяются по времени.
Упомянутая первая синусоида S1 представляет разрывность в интервале времени, в котором участок шины 10 входит в контакт с землей и затем теряет контакт с землей.
Аналогично, первая отфильтрованная синусоида S1’ представляет разрывность в упомянутом интервале времени менее выраженно, чем первая синусоида S1 (т.е. синусоида, когда первый БИХ-фильтр не применяется).
При использовании, шина 10 совершает множество оборотов.
Со ссылкой на первое электронное устройство 1, для каждого оборота шины 10, можно идентифицировать и сохранять момент времени, в котором значение отфильтрованного линейного ускорения A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно нулю.
Упомянутый момент времени совместно с дополнительным моментом времени, именуемым второй отфильтрованной синусоидой S2’, связанной с отфильтрованным линейным ускорением A2x’ вдоль оси x, связанной со вторым электронным устройством 2 (когда значение этого отфильтрованного линейного ускорения A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно нулю), задают интервал времени между упомянутыми двумя отфильтрованными синусоидами S1’, S2’ (как объяснено ниже со ссылкой фиг. 3A и в особенности на фиг. 3B).
В раскрытом варианте осуществления, упомянутый момент времени следует за упомянутым дополнительным моментом времени.
Кроме того, в раскрытом варианте осуществления, упомянутый интервал времени отличается от упомянутого интервала времени.
Фактически, интервал времени находится на участке первой синусоиды S1, от -1 до +1, отличном от участка той же первой синусоиды от +1 до -1, где присутствует интервал времени.
Однако достаточно, чтобы упомянутый момент времени находился за пределами интервала времени.
В раскрытом примере, упомянутое первое средство 15 хранения является внешним по отношению к первому логическому блоку 11 управления.
Однако упомянутое средство 15 хранения может быть включено в упомянутый первый логический блок 11 управления, без отклонения от объема изобретения.
С конкретной ссылкой на второе электронное устройство 2, как упомянуто выше, в раскрытом варианте осуществления, упомянутое второе электронное устройство 2 располагается в выемке 20A обода 20.
Однако, упомянутое второе электронное устройство 2 может располагаться на ободе 20 в любой позиции, например, на внешней поверхности обода, т.е. поверхности обращенный к наружу, или даже на диске обода, без отклонения от объема изобретения.
Упомянутое второе электронное устройство 2 содержит внутри:
- второе средство 24 подачи питания для подачи питания на упомянутое второе электронное устройство 2,
- второй беспроводной приемопередающий модуль 23 для передачи и приема сигналов/данных на/от упомянутого блока 3 обработки,
- второй блок 22 инерциальных измерений, содержащий второй гироскоп 221 и второй акселерометр 222 и выполненный с возможностью:
получать, посредством упомянутого второго гироскопа 221, значение по меньшей мере угловой скорости ω2y вокруг оси y, и
получать, посредством упомянутого второго акселерометра 222, значение по меньшей мере линейного ускорения A2x вдоль оси x, причем в раскрытом варианте осуществления, значение упомянутого линейного ускорения A2x вдоль оси x является нормализованным относительно единицы значением (т.е. значение линейного ускорения A2x вдоль оси x составляет от -1 до +1),
- второе средство 25 хранения для хранения данных,
- второй логический блок 21 управления, подключенный к упомянутому второму блоку 22 инерциальных измерений, к упомянутому второму беспроводному приемопередающему модулю 23 и к упомянутому второму средству 25 хранения, и выполненный с возможностью:
принимать от второго блока 22 инерциальных измерений упомянутого второго электронного устройства 2, значение упомянутой по меньшей мере одной угловой скорости ω2y вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения A2x вдоль оси x,
фильтровать посредством второго цифрового фильтра значение упомянутой по меньшей мере одной угловой скорости ω2y вокруг оси y для получения по меньшей мере одной дополнительной угловой скорости или отфильтрованной угловой скорости ω2y’ вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения A2x вдоль оси x для получения по меньшей мере одного дополнительного линейного ускорения или отфильтрованного линейного ускорения A2x’ вдоль оси x,
идентифицировать каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению (т.е. заданному значению, выбранному для отфильтрованного линейного ускорения A1x’ вдоль оси x, связанной с первым электронным устройством 1),
сохранять в упомянутом втором средстве 25 хранения каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения A2x вдоль оси x равно упомянутому заданному значению,
сохранять в упомянутом втором средстве 25 хранения значение упомянутой отфильтрованной угловой скорости ω2y’ вокруг оси y в каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению,
отправлять на упомянутый блок 3 обработки:
дополнительные моменты времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению,
значение упомянутой отфильтрованной угловой скорости ω2y’ вокруг оси y в упомянутые дополнительные моменты времени.
Со ссылкой на второй цифровой фильтр, в раскрытом варианте осуществления, упомянутый второй цифровой фильтр является вторым БИХ-фильтром.
В частности, предпочтительно, чтобы упомянутый второй БИХ-фильтр имел частоту от 0,1 Гц до 1 Гц.
Второй логический блок 21 управления может быть выполнен с возможностью отправки на блок 3 обработки упомянутые дополнительные моменты времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению и значение упомянутой по меньшей мере одной отфильтрованной угловой скорости ω2y’ вокруг оси y в упомянутые моменты времени, когда шина 10 совершила заданное второе количество оборотов.
Преимущественно, передача данных на блок 3 обработки упомянутым вторым электронным устройством 2 после заданного второго количества оборотов позволяет обеспечивать энергосбережение.
В описанном варианте осуществления, как упомянуто выше, ссылка будет сделана на заданное значение для отфильтрованного линейного ускорения A2x’ вдоль оси x, связанной со вторым электронным устройством 2 равный нулю.
Дополнительные моменты времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно нулю, являются моментами времени, когда вторая отфильтрованная синусоида S2’, связанная с отфильтрованным линейным ускорением A2x’ вдоль оси x второго электронного устройства 2, изменяет знак (фиг. 3 и 4).
Вторая синусоида S2 и вторая отфильтрованная синусоида S2’ демонстрируют, соответственно, как линейное ускорение A2x вдоль оси x и отфильтрованное линейное ускорение A2x’ вдоль оси x, каждое из которых связано со вторым электронным устройством 2, изменяются по времени.
Как упомянуто выше, при использовании, шина 10 совершает множество оборотов. Следовательно, обод 20 также совершает множество оборотов.
Со ссылкой на второе электронное устройство 2, для каждого оборота, можно идентифицировать и сохранять дополнительный момент времени, в котором значение отфильтрованного линейного ускорения A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно нулю.
Со ссылкой на цифровые фильтры, и, в частности, вышеупомянутые КИХ-фильтры, эти КИХ-фильтры позволяют удалять шум, в основном, вследствие вибраций, механических передач и нарушений земли.
Со ссылкой на оба электронные устройства 1, 2 системы, каждое электронное устройство 1, 2 соответственно прикреплено к шине 10 и к ободу 20 посредством соответствующего крепления устройства, устойчивого к пыли и воде (не показано).
С конкретной ссылкой на блок 3 обработки, упомянутый блок 3 обработки содержит внутри:
- третье средство 34 подачи питания для подачи питания на упомянутый блок 3 обработки,
- третий беспроводной приемопередающий модуль 33 для передачи и приема сигналов/данных на/от упомянутого первого электронного устройства 1 и упомянутого второго электронного устройства 2,
- третье средство 35 хранения, в котором хранится значение угла αref приведения,
- третий логический блок 31 управления, подключенный к упомянутому третьему беспроводному приемопередающему модулю 33, к упомянутому третьему средству 34 подачи питания и к упомянутому третьему средству 35 хранения, и выполненный с возможностью:
принимать значение упомянутой отфильтрованной по меньшей мере одной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1, и каждый момент времени, когда значение упомянутого по меньшей мере одного отфильтрованного линейного ускорения A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно упомянутому заданному значению,
принимать значение упомянутой по меньшей мере одной отфильтрованной угловой скорости ω2y’ вокруг оси y, связанной со вторым электронным устройством 2, и каждый дополнительный момент времени, когда значение упомянутого по меньшей мере одного отфильтрованного линейного ускорения A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению,
вычислять угол α между первой осью A1 и второй осью A2, причем упомянутая первая ось A1 является осью, проходящей через центр шины 10 и упомянутую первую точку (т.е. точку шины 10, в которой применяется упомянутое первое электронное устройство 1), и упомянутая вторая ось A2 является осью, проходящей через центр шины 10 и упомянутую вторую точку (т.е. точку обода 20, в которой применяется упомянутое второе электронное устройство 2), согласно следующей формуле:

где
 - среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1 в момент времени, в который соответствующее отфильтрованное линейное ускорение A1x’ вдоль оси x равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления), и значением отфильтрованной угловой скорости y ω2y’ вокруг оси, связанной со вторым электронным устройством 2, в дополнительный момент времени, который соответствующее отфильтрованное линейное ускорение A2x’ вдоль оси x равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления);
- среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1 в момент времени, в который соответствующее отфильтрованное линейное ускорение A1x’ вдоль оси x равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления), и значением отфильтрованной угловой скорости y ω2y’ вокруг оси, связанной со вторым электронным устройством 2, в дополнительный момент времени, который соответствующее отфильтрованное линейное ускорение A2x’ вдоль оси x равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления);
 - интервал времени между моментом времени, в котором отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления) и дополнительным моментом времени, в котором отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления), причем упомянутый момент времени и упомянутый дополнительный момент времени являются последовательными моментами времени,
- интервал времени между моментом времени, в котором отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления) и дополнительным моментом времени, в котором отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению (т.е. нулю в раскрытом варианте осуществления), причем упомянутый момент времени и упомянутый дополнительный момент времени являются последовательными моментами времени,
сравнивать вычисленное значение угла α со значением угла αref приведения, хранящегося в упомянутом третьем средстве 35 хранения,
если значение угла α отличается от значения угла αref приведения, вычислять разность между значением угла α и значением угла αref для измерения проскальзывания шины 10 относительно обода 20.
В раскрытом варианте осуществления, единый интервал времени и единая пара отфильтрованных угловых скоростей вокруг оси y учитывались для вычисления угла α, причем упомянутая пара отфильтрованных угловых скоростей вокруг оси y формируется значением отфильтрованной угловой скорости ω1y' вокруг оси y, связанной с первым электронным устройством 1 в упомянутый момент времени и значением отфильтрованной угловой скорости ω2y’ вокруг оси y, связанной со вторым электронным устройством 2 в упомянутый дополнительный момент времени.
Однако, для вычисления угла  , можно выбирать множество интервалов ,
, можно выбирать множество интервалов ,  , …
, …  времени, каждый из которых задается соответствующей парой моментов времени (т.е. парой, образованной соответствующим моментом времени, когда отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно соответствующему заданному значению, и соответствующим дополнительным моментом времени, когда отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению) и учитывать значение отфильтрованной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1 в соответствующий момент времени и значение отфильтрованной угловой скорости ω2y’ вокруг оси y, связанной со вторым электронным устройством 2 в соответствующий дополнительный момент времени.
времени, каждый из которых задается соответствующей парой моментов времени (т.е. парой, образованной соответствующим моментом времени, когда отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно соответствующему заданному значению, и соответствующим дополнительным моментом времени, когда отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению) и учитывать значение отфильтрованной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1 в соответствующий момент времени и значение отфильтрованной угловой скорости ω2y’ вокруг оси y, связанной со вторым электронным устройством 2 в соответствующий дополнительный момент времени.
Следовательно, угол α можно вычислять согласно следующей формуле:



где
- количество интервалов времени, в котором каждый интервал времени задается соответствующим моментом времени, когда отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно соответствующему заданному значению, и соответствующий дополнительный момент времени, когда отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению,
- среднее значение отфильтрованных угловых скоростей вокруг оси y заданное значением отфильтрованной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1 в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение A1x’ вдоль оси x равно заданному значению и значением отфильтрованной угловой скорости ω2y’ вдоль оси y, связанной со вторым электронным устройством 2 в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение A2x’ вдоль оси x равно упомянутому заданному значению,
- соответствующий интервал времени, заданный моментом времени, когда отфильтрованное линейное ускорение A1x’, связанное с первым электронным устройством 1, равно соответствующему заданному значению и дополнительным моментом времени, в котором отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению.
В случае, когда N равно 1 (т.е. выбран единый интервал времени), формула для вычисления угла, где упомянуто множество интервалов времени, будет такой же, как ранее упомянутая формула для вычисления угла, где упомянут только интервал времени.
Предпочтительно, чтобы упомянутый третий логический блок 31 управления блока 3 обработки был выполнен с возможностью генерирования сигнала тревоги (которым может быть акустический и/или визуальный сигнал), когда вычисленный угол имеет значение, выходящее за пределы заданного диапазона значений с центром в значении упомянутого угла приведения.
В частности, предпочтительно также, чтобы упомянутый третий логический блок 31 управления был выполнен с возможностью генерирования упомянутого сигнала тревоги, когда вычисленный угол имеет значение, выходящее за пределы заданного диапазона значений для заданного количества последовательных моментов времени.
Кроме того, упомянутый третий логический блок 31 управления может быть выполнен с возможностью изменять значение упомянутого угла αref приведения.
В частности, упомянутый третий логический блок 31 управления может быть выполнен с возможностью изменять значение упомянутого угла αref приведения на основании среднего значения значений вычисленных углов, когда упомянутые значения попадают в упомянутый заданный диапазон значений с центром в последнем значении угла, вычисленном для определенного количества последовательных моментов времени.
В этом конкретном случае, упомянутый третий логический блок 31 управления выполнен с возможностью:
- проверять, что значения двух или более вычисленных углов попадают в упомянутый заданный диапазон значений,
- вычислять среднее значение упомянутых двух или более вычисленных углов,
- изменять значение упомянутого угла αref приведения на основании упомянутого среднего значения, когда упомянутые значения попадают в упомянутый заданный диапазон значений с центром в последнем вычисленном значении угла, предпочтительно для заданного количества последовательных моментов времени.
Упомянутый третий логический блок 31 управления может быть выполнен с возможностью изменять значение угла αref приведения независимо от генерирования сигнала тревоги.
На фиг. 3A показана первая синусоида S1 (представленная сплошной черной линией), связанная с линейным ускорением A1x вдоль оси x первого электронного устройства 1 (т.е. электронного устройства, размещенного на внутренней поверхности шины) и такая же первая отфильтрованная синусоида S1’ (представленная белой пунктирной линией), а также вторая синусоида S2 (представленная дополнительной непрерывной черной линией), связанная с линейным ускорением A2x вокруг оси x второго электронного устройства 2 (т.е. электронным устройством, размещенным в выемке обода) и такая же вторая отфильтрованная синусоида S2’ (представленная дополнительной белой пунктирной линией).
Как можно видеть из фиг. 3A, как упомянуто выше, первая синусоида S1 (связанная с линейным ускорением A1x вдоль оси x первого электронного устройства 1) имеет разрывность ввиду того, что, в ходе вращения шины 10, участок упомянутой шины 10 входит в контакт с землей и затем теряет контакт с землей (и интервал времени является интервалом времени, в котором шина 10 контактирует с землей), тогда как вторая синусоида S2 (связанная с линейным ускорением A2x вдоль оси x второго электронного устройства 2) не демонстрирует никакой разрывности.
В первой отфильтрованной синусоиде S1’ присутствует такая же разрывность, хотя и менее выраженная.
Интервал  времени указывает интервал времени между моментом времени, когда отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно заданному значению (т.е. нулевому значению в описанном варианте осуществления) и дополнительным моментом времени, когда отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно заданному значению (т.е. нулевому значению в раскрытом варианте осуществления).
времени указывает интервал времени между моментом времени, когда отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно заданному значению (т.е. нулевому значению в описанном варианте осуществления) и дополнительным моментом времени, когда отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно заданному значению (т.е. нулевому значению в раскрытом варианте осуществления).
На фиг. 3A, как упомянуто выше, показано, как линейное ускорение вдоль оси x, связанной с первым электронным устройством 1, до и после применения первого БИХ-фильтра, и линейное ускорение вдоль оси x, связанной со вторым электронным устройством 2, до и после применения второго БИХ-фильтра, изменяются по времени.
Каждое линейное ускорение представляется соответствующей синусоидой:
S1 обозначает первую синусоиду, выражающую линейное ускорение A1x вдоль оси x, связанной с первым электронным устройством 1,
S1’ обозначает первую отфильтрованную синусоиду, связанную с отфильтрованным линейным ускорением A1x’ вдоль оси x, связанной с первым электронным устройством 1,
S2 обозначает вторую синусоиду, выражающую линейное ускорение A2x вдоль оси x, связанной со вторым электронным устройством 2,
S2’ обозначает вторую отфильтрованную синусоиду, связанную с отфильтрованным линейным ускорением A2x’ вдоль оси x, связанной со вторым электронным устройством 2,
Вращательное движение шины 10 и вращательное движение обода 20 представлены, соответственно, первой синусоидой S1 и второй синусоидой S2 в координатной плоскости, в котором по оси абсцисс отложено время, и по оси ординат отложено линейное ускорение вдоль оси x, когда связано, соответственно, с первым электронным устройство 1 и со вторым электронным устройством 2.
Каждая из упомянутых синусоид S1, S2 фильтруется соответствующим БИХ-фильтром для удаления шума вследствие факторов (например, вибраций, механических передач, неровностей земли и т.д.)
Момент времени соответствует точке, в которой первая отфильтрованная синусоида S1’ пересекает ось абсцисс упомянутой координатной плоскости.
Момент времени соответствует точке, в которой вторая отфильтрованная синусоида S2’ пересекает ось абсцисс упомянутой координатной плоскости
Как упомянуто выше и как можно видеть из фиг. 3A, первая синусоида S1 и, таким образом также первая отфильтрованная синусоида S1’ представляет разрывность в соответствии с интервалом времени, в котором участок шины 10 входит в контакт с землей и затем теряет контакт с землей.
Каждый интервал , , … времени выходит за пределы интервала времени, где присутствует разрывность, и не перекрывается с этим интервалом времени.
На фиг. 3B подробно показана первая отфильтрованная синусоида S1’ и вторая отфильтрованная синусоида S2’, а также интервалы , , … времени для большей наглядности.
На фиг. 4A показана в том же интервале времени отфильтрованная угловая скорость ω1y’ вокруг оси y, связанной с первым электронным устройством 1, и отфильтрованная угловая скорость ω1y вокруг оси y, т.е. угловая скорость, которая не была отфильтрована первым БИХ-фильтром, когда используется первое электронное устройство 1.
Угловая скорость ω1y вокруг оси y представляется черной сплошной линией, и отфильтрованная угловая скорость ω1y’ вокруг оси y представляется белой сплошной линией.
На фиг. 4B подробно показана отфильтрованная угловая скорость ω1y’ вокруг оси y, связанной с первым устройством 1 в интервале времени.
На фиг. 5A показана в том же интервале времени отфильтрованная угловая скорость ω2y’ вокруг оси y, связанной со вторым электронным устройством 2, и угловая скорость ω2y вокруг оси y, т.е. угловая скорость, которая не была отфильтрована вторым БИХ-фильтром, когда используется второе электронное устройство 2.
Отфильтрованная угловая скорость ω2y вокруг оси y представляется черной сплошной линией, и отфильтрованная угловая скорость ω2y’ вокруг оси y представляется белой сплошной линией.
На фиг. 5B подробно показана отфильтрованная угловая скорость ω2y’ вокруг оси y, связанной со вторым устройством 2 в интервале времени.
Кроме того, упомянутое первое электронное устройство 1 может быть снабжено первым источником 16 тактового сигнала, подключенным к первому логическому блоку 11 управления, и упомянутое второе электронное устройство 2 может быть снабжено вторым источником 26 тактового сигнала, подключенным ко второму логическому блоку 21 управления, и упомянутый блок 3 обработки может быть снабжен третьим источником 36 тактового сигнала, подключенным к третьему логическому блоку управления.
В частности, упомянутый третий логический блок 31 управления блока 3 обработки выполнен с возможностью:
- отправлять синхросигнал на упомянутое первое электронное устройство 1 и на упомянутое второе электронное устройство 2 для синхронизации соответствующих источников тактового сигнала с третьим источником 36 тактового сигнала упомянутого блока 3 обработки, благодаря чему все источники тактового сигнала синхронизируются, на основании заданного временного разрешения, которое может потребоваться в соответствии с обстоятельствами.
Предпочтительно, чтобы упомянутый синхросигнал отправляется периодически, например, когда шина 10 совершила заданное количество оборотов.
Отправка синхросигнала не требуется, если каждое из электронных устройств выполнено с возможностью только отправки данных на блок 3 обработки, и последнее выполнено с возможностью приема и обработки таких данных.
В варианте, в котором каждое электронное устройство 1, 2 выполнено с возможностью только получения и отправки данных (после их фильтрации) на блок 3 обработки, и последнее выполнено с возможностью приема и обработки таких данных для вычисления проскальзывания шины относительно обода, причем первый беспроводной приемопередающий модуль (размещенный в первом электронном устройстве 1) заменен первым модулем беспроводной передачи, второй беспроводной приемопередающий модуль (размещенный во втором электронном устройстве 2) заменен вторым модулем беспроводной передачи и третий беспроводной приемопередающий модуль (размещенный в блоке 3 обработки) заменен модулем беспроводного приема.
Кроме того, логический блок управления блока 3 обработки, т.е. третий логический блок 31 управления, выполнен с возможностью:
сохранять соответствующий момент времени приема, когда упомянутый третий логический блок 31 управления принимает значение отфильтрованной угловой скорости ω1y’ вокруг оси y, связанной с первым электронным устройством 1 и значение отфильтрованной угловой скорости ω2y’ вокруг оси y, связанной со вторым электронным устройством 2, на основании времени, установленного третьим источником 36 тактового сигнала,
получать:
момент времени, когда первое электронное устройство 1 сохранило значение упомянутой дополнительной отфильтрованной угловой скорости ω1y’ вокруг оси y, вычитание в момент времени приема первого интервала  времени, относящегося к времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости ω1y’ вокруг оси y на блок 3 обработки и второго временного интервала
времени, относящегося к времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости ω1y’ вокруг оси y на блок 3 обработки и второго временного интервала  вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость ω1y’ вокруг оси y достигла упомянутого блока 3 обработки (т.е. времени прохождения через среду передачи, присутствующую между первым электронным устройством 1 и блоком 3 обработки), и
вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость ω1y’ вокруг оси y достигла упомянутого блока 3 обработки (т.е. времени прохождения через среду передачи, присутствующую между первым электронным устройством 1 и блоком 3 обработки), и
момент времени, когда второе электронное устройство 2 сохранило значение упомянутой дополнительной отфильтрованной угловой скорости ω2y’ вокруг оси y, вычитание в момент времени приема дополнительного первого интервала  времени, относящегося к времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости ω2y’ вокруг оси y на блок 3 обработки и дополнительного второго интервала
времени, относящегося к времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости ω2y’ вокруг оси y на блок 3 обработки и дополнительного второго интервала  времени вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость ω2y’ вокруг оси y достигла упомянутого блока 3 обработки (т.е. времени прохождения через среду передачи, присутствующую между вторым электронным устройством 2 и блоком 3 обработки),
времени вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость ω2y’ вокруг оси y достигла упомянутого блока 3 обработки (т.е. времени прохождения через среду передачи, присутствующую между вторым электронным устройством 2 и блоком 3 обработки),
вычислять интервал времени между упомянутыми двумя полученными моментами времени.
Со ссылкой на время, необходимое для прохождения через среду передачи, присутствующую между каждым электронным устройством 1, 2 и блоком 3 обработки, это время может зависеть от различных факторов, например, соответствующего расстояния между каждым электронным устройством 1, 2 и блоком 3 обработки и типом самой среды передачи.
В этом случае, (т.е. если электронные устройства предназначены для получения и передачи данных, и блок обработки предназначен для приема и обработки упомянутых данных), энергосбережение получается ввиду того, что электронные устройства 1, 2 не принимают сигналы от блока 3 обработки данных. Как явствует из вышеизложенного, каждое электронное устройство 1, 2 может быть выполнено с возможностью получения и передачи данных (после их фильтрации), и блок 3 обработки может быть выполнен с возможностью приема и обработки таких данных для вычисления угла и сравнения его с углом приведения, или каждое электронное устройство может быть выполнено с возможностью получения и передачи данных, а также приема одного или более сигналов от блока обработки (например, синхросигнала), и блок обработки может быть выполнен с возможностью приема и обработки таких данных для вычисления угла и сравнения его с углом приведения, а также для отправки одного или более сигналов на каждое из упомянутых электронных устройств (например, синхросигнала).
Настоящее изобретение относится также к способу измерения проскальзывания между шиной 10 и ободом 20, на котором смонтирована упомянутая шина 10, посредством выше раскрытой системы.
Упомянутый способ содержит следующие этапы:
A) получение значения по меньшей мере одной угловой скорости ω1y вокруг оси y и значение по меньшей мере одного линейного ускорения A1x вдоль оси x, связанной с упомянутым первым электронным устройством 1,
B) фильтрация посредством первого цифрового фильтра значения упомянутой по меньшей мере одной угловой скорости ω1y вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости ω1y’ вокруг оси y и значение упомянутого по меньшей мере одного линейного ускорения A1x вдоль оси x для получения по меньшей мере одного отфильтрованного углового ускорения A1x’ вдоль оси x,
C) идентификация каждого момента времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно заданному значению,
D) хранение:
каждого момента времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно упомянутому заданному значению, и
значения упомянутой отфильтрованной угловой скорости ω1y’ вокруг оси y в каждый момент времени, когда значение упомянутого отфильтрованного линейного ускорения A1x’ вдоль оси x равно упомянутому заданному значению,
E) получение значения упомянутой по меньшей мере одной угловой скорости ω2y вокруг оси y и значения упомянутого по меньшей мере одного линейного ускорения A2x вдоль оси x, связанных с упомянутым вторым электронным устройством 2,
F) фильтрация посредством второго цифрового фильтра значения упомянутой по меньшей мере одной угловой скорости ω2y вокруг оси y для получения по меньшей мере одной отфильтрованной угловой скорости ω2y’ вокруг оси y и значения упомянутого по меньшей мере одного линейного ускорения A2x вдоль оси x для получения по меньшей мере одного отфильтрованного линейного ускорения A2x’ вдоль оси x,
G) идентификация каждого дополнительного момента времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению,
H) хранение:
каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению,
значение упомянутой отфильтрованной угловой скорости ω2y’ вокруг оси y в каждый дополнительный момент времени, когда значение упомянутого отфильтрованного линейного ускорения A2x’ вдоль оси x равно упомянутому заданному значению,
I) вычисление угла α согласно одной из следующих формул (на основании количества учитываемых интервалов времени):
где
- среднее значение угловых скоростей отфильтрованный ω1y’ и ω2y’ вокруг оси y,
- интервал времени между моментом времени, в котором отфильтрованное линейное ускорение A1x’ вдоль оси x равно упомянутому заданному значению и дополнительным моментом времени, в котором отфильтрованное линейное ускорение A2x’ вдоль оси x равно упомянутому заданному значению,
или
где
- количество интервалов времени,
- среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости ω1y’ вокруг оси y в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение A1x’ вдоль оси x равно заданному значению, и из значения отфильтрованной угловой скорости ω2y’ вокруг оси y в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение A2x’ вдоль оси x равно упомянутому заданному значению,
- соответствующий интервал времени, заданный моментом времени, когда отфильтрованное линейное ускорение A1x’ вдоль оси x, связанной с первым электронным устройством 1, равно соответствующему заданному значению, и дополнительный момент времени, в котором отфильтрованное линейное ускорение A2x’ вдоль оси x, связанной со вторым электронным устройством 2, равно упомянутому заданному значению,
, , … - интервалы времени между соответствующими моментами , , … времени, в котором отфильтрованное линейное ускорение A1x’ вдоль оси x равно упомянутому заданному значению, и соответствующими дополнительными моментами , , … времени, в котором отфильтрованное линейное ускорение A2x’ вдоль оси x равно упомянутому заданному значению,
J) сравнение значения угла α вычисленный со значением угла αref приведения,
K) если значение угла α отличается от значения угла αref приведения, вычисление разности между значением угла α и значением угла αref для измерения проскальзывания шины 10 относительно обода 20.
Как упомянуто выше для системы, упомянутый первый цифровой фильтр и упомянутый второй цифровой фильтр, соответственно, являются первым БИХ-фильтром и вторым БИХ-фильтром.
Кроме того, в случае, когда N равно 1 (т.е. выбран единый интервал времени), формула угла, в которой присутствует множество интервалов времени, будет равна формуле угла, в которой присутствует только интервал времени.
Преимущественно, как упомянуто выше, посредством системы и способа изобретения, можно измерять проскальзывания по времени шины относительно обода, на котором смонтирована упомянутая шина, когда шина эксплуатируется.
Следовательно, как упомянуто, измерение проскальзывания между шиной и ободом является динамическим измерением.
Настоящее изобретение описан в целях иллюстрации, но не ограничения, согласно его предпочтительным вариантам осуществления, но следует понимать, что изменения и/или модификации могут осуществляться специалистами в данной области техники, без отклонения от его объема, заданного в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ПЯТНА КОНТАКТА ШИНЫ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2815560C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ АВТОНОМНОЙ И АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2004 |
|
RU2272253C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| ШИНА И ПРЕСС-ФОРМА ФОРМОВАНИЯ ШИНЫ | 2012 |
|
RU2576314C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ШИН В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ И УСТАНОВКЕ ДЛЯ ИЗГОТОВЛЕНИЯ ШИН ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2705443C2 |
| ПНЕВМАТИЧЕСКАЯ ШИНА, СИСТЕМА ОТСЛЕЖИВАНИЯ НАГРУЗКИ НА ШИНУ И СПОСОБ ДЛЯ ЭКОНОМИИ ЭНЕРГОПОТРЕБЛЕНИЯ ШИНОЙ | 2020 |
|
RU2779917C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТОМ | 1988 |
|
SU1568765A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ НЕТОЧНОЙ ВЫСТАВКЕ ГИРОСКОПА НА ОБЪЕКТЕ | 2004 |
|
RU2267748C1 |
Настоящее изобретение относится к системе для измерения проскальзывания шины (10) относительно обода (20), на котором смонтирована упомянутая шина (10). В частности, система содержит первое электронное устройство (1) и второе электронное устройство (2), каждое из которых выполнено с возможностью по меньшей мере получения, фильтрации, сохранения и отправки данных, и блок (3) обработки, внешний по отношению к упомянутым электронным устройствам (1, 2), выполненный с возможностью по меньшей мере принимать и обрабатывать данные, отправленные каждым электронным устройством (1, 2), для измерения упомянутого проскальзывания путем измерения угла (α) и сравнения значения этого угла относительно угла αref приведения. Настоящее изобретение также относится к способу измерения проскальзывания шины (10) относительно обода (20), на котором смонтирована упомянутая шина (10). Технический результат – возможность проводить измерения во время эксплуатации шины. 2 н. и 7 з.п. ф-лы, 5 ил.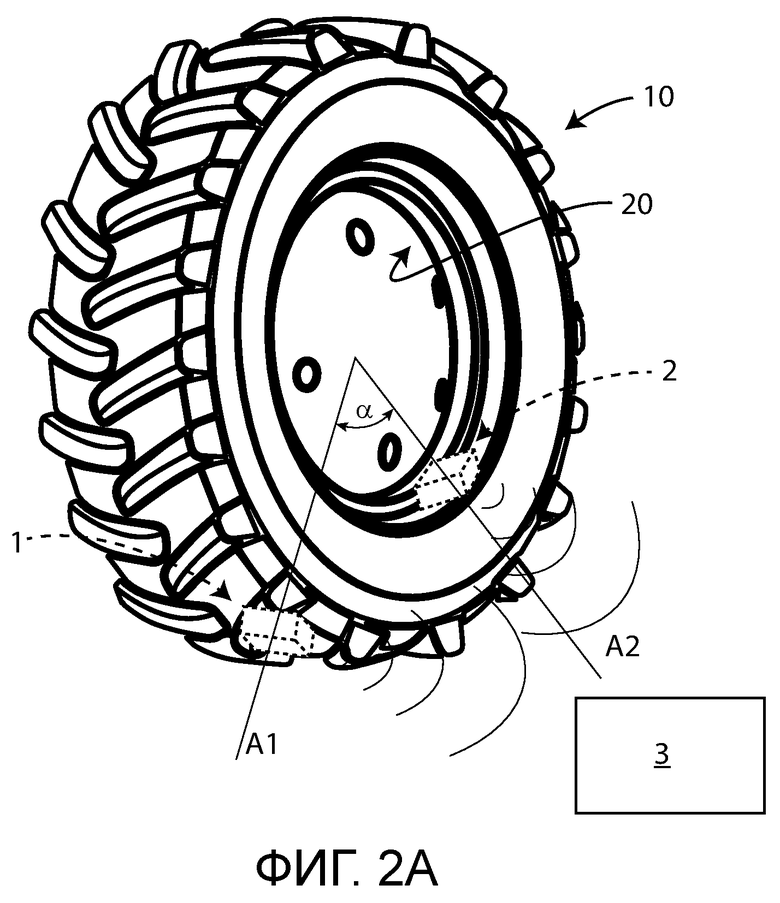
1. Система для измерения проскальзывания между шиной (10) и ободом (20), на котором смонтирована шина (10), причем упомянутая система содержит:
- первое электронное устройство (1), размещаемое, при использовании, в контакте с внутренней поверхностью (10A) шины (10),
- второе электронное устройство (2), размещаемое, при использовании, в контакте с ободом (20),
- блок (3) обработки, внешний по отношению к электронным устройствам (1, 2), при этом:
с первым электронным устройством (1) связана первая система x1, y1, z1 координат таким образом, что ось x1 является касательной к траектории кругового движения первой точки, которая является точкой шины (10), в которой применяется первое электронное устройство (1), а ось z1 перпендикулярна оси x1,
со вторым электронным устройством (2) связана вторая система x2, y2, z2 координат таким образом, что ось x2 является касательной к траектории кругового движения второй точки, которая является точкой обода (20), в которой применяется второе электронное устройство (2), а ось z2 перпендикулярна оси x2,
первое электронное устройство (1) выполнено с возможностью по меньшей мере отправки данных на блок (3) обработки и содержит внутри:
- первый блок (12) инерциальных измерений, содержащий первый гироскоп (121) и первый акселерометр (122) и выполненный с возможностью:
получения, посредством первого гироскопа (121), значения по меньшей мере одной угловой скорости вокруг оси y (ω1y), и, посредством первого акселерометра (122), значения по меньшей мере одного линейного ускорения вдоль оси x (A1x),
- первое средство (15) хранения для хранения данных,
- первый логический блок (11) управления, соединенный с первым блоком (12) инерциальных измерений и с первым средством (15) хранения, и выполненный с возможностью
приема от первого блока (12) инерциальных измерений значения упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω1y) и значения упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A1x),
фильтрования посредством первого цифрового фильтра значения упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω1y) для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω1y’) и значения упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A1x) для получения по меньшей мере одного отфильтрованного углового ускорения вдоль оси x (A1x’),
идентифицирования каждого момента времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно заданному значению,
сохранения в первом средстве (15) хранения:
- каждого момента времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно упомянутому заданному значению, и
- значения отфильтрованной угловой скорости вокруг оси y (ω1y’) в каждый момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно упомянутому заданному значению,
отправления на блок (3) обработки:
- моментов времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно упомянутому заданному значению,
- значения отфильтрованной угловой скорости вокруг оси y (ω1y’) в упомянутые моменты времени,
при этом второе электронное устройство (2) выполнено с возможностью по меньшей мере отправки данных на блок (3) обработки и содержит внутри:
- второй блок (22) инерциальных измерений, содержащий второй гироскоп (221) и второй акселерометр (222) и выполненный с возможностью:
получения, посредством второго гироскопа (221), значения по меньшей мере угловой скорости вокруг оси y (ω2y), и, посредством второго акселерометра (222), значения по меньшей мере линейного ускорения вдоль оси x (A2x),
- второе средство (25) хранения для хранения данных,
- второй логический блок (21) управления, подключенный ко второму блоку (22) инерциальных измерений и ко второму средству (25) хранения и выполненный с возможностью:
приема от второго блока (22) инерциальных измерений второго электронного устройства (2), значения упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω2y) и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A2x),
фильтрования посредством второго цифрового значения упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω2y) для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω2y’) и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A2x) для получения по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x (A2x’),
идентифицирования каждого дополнительного момента времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
сохранения во втором средстве (25) хранения:
- каждого дополнительного момента времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
- значения отфильтрованной угловой скорости вокруг оси y (ω2y’) в каждый дополнительный момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
отправки на блок (3) обработки:
- дополнительных моментов времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
- значения упомянутой отфильтрованной угловой скорости вокруг оси y (ω2y’) в упомянутые дополнительные моменты времени,
причем блок (3) обработки выполнен с возможностью по меньшей мере приема данных от первого электронного устройства (1) и от второго электронного устройства (2) и содержит внутри:
- третье средство (35) хранения, в котором хранится значение угла αref приведения,
- третий логический блок (31) управления, подключенный к третьему средству (35) хранения и выполненный с возможностью:
приема значения отфильтрованной по меньшей мере одной угловой скорости вокруг оси y (ω1y’), связанной с первым электронным устройством (1), и каждого момента времени, когда значение упомянутого по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x (A1x’), связанной с первым электронным устройством (1), равно упомянутому заданному значению,
приема значения упомянутой по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω2y’), связанной со вторым электронным устройством (2), и каждого дополнительного момента времени, когда значение упомянутого по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x (A2x’), связанной со вторым электронным устройством (2), равно упомянутому заданному значению,
вычисления угла (α) между первой осью (A1) и второй осью (A2), при этом первая ось (A1) является осью, проходящей через центр шины (10) и первую точку, а вторая ось (A2) является осью, проходящей через центр шины (10) и вторую точку, согласно следующей формуле:
где
 - количество интервалов
- количество интервалов  времени,
времени,
 - среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости вокруг оси y (ω1y’) в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x (A1x’) равно заданному значению, и из значения отфильтрованной угловой скорости вокруг оси y (ω2y’) в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x (A2x’) равно упомянутому заданному значению,
- среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости вокруг оси y (ω1y’) в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x (A1x’) равно заданному значению, и из значения отфильтрованной угловой скорости вокруг оси y (ω2y’) в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x (A2x’) равно упомянутому заданному значению,
- соответствующий интервал  ,
,  , …
, …  , времени заданный моментом
, времени заданный моментом  ,
,  , …
, …  времени, в котором отфильтрованное линейное ускорение вдоль оси x (A1x’) равно соответствующему заданному значению, и дополнительный момент
времени, в котором отфильтрованное линейное ускорение вдоль оси x (A1x’) равно соответствующему заданному значению, и дополнительный момент  ,
,  , …
, …  времени, в котором отфильтрованное линейное ускорение вдоль оси x (A2x’) равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала
времени, в котором отфильтрованное линейное ускорение вдоль оси x (A2x’) равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала  времени, в течение которого участок шины (10) входит в контакт с землей и затем теряет контакт с землей,
времени, в течение которого участок шины (10) входит в контакт с землей и затем теряет контакт с землей,
сравнения вычисленного значения угла (α) со значением угла αref приведения, хранящегося в третьем средстве (35) хранения,
если значение угла (α) отличается от значения угла αref приведения, вычисления разности между значением угла (α) и значением угла αref для измерения проскальзывания шины (10) относительно обода (20).
2. Система по п. 1, в которой третий логический блок (31) управления блока (3) обработки выполнен с возможностью генерирования сигнала тревоги, когда вычисленный угол (α) имеет значение, выходящее за пределы заданного диапазона значений с центром в значении угла αref приведения, предпочтительно для заданного количества последовательных моментов времени.
3. Система по п. 1 или 2, в которой третий логический блок (31) управления выполнен с возможностью:
проверки того, попадают ли значения двух или более вычисленных углов в упомянутый заданный диапазон значений,
вычисления среднего значения упомянутых двух или более значений вычисленных углов,
изменения значения угла αref приведения на основании среднего значения, когда упомянутые значения попадают в заданный диапазон значений с центром в последнем вычисленном значении угла, предпочтительно для заданного количества последовательных моментов времени.
4. Система по любому из предыдущих пунктов, в которой:
первый логический блок (11) управления первого электронного устройства (1) выполнен с возможностью отправки на блок (3) обработки упомянутые моменты времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно упомянутому заданному значению и значение упомянутой по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω1y’) в упомянутые моменты времени, когда шина (10) совершила заданное первое количество оборотов, а
второй логический блок (21) управления второго электронного устройства (2) выполнен с возможностью отправки на блок (3) обработки упомянутых дополнительных моментов времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению, и значение упомянутой по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω2y’) в упомянутые моменты времени, когда шина (10) совершила заданное второе количество оборотов.
5. Система по любому из предыдущих пунктов, в которой:
первый цифровой фильтр является первым БИХ-фильтром; причем предпочтительная частота первого БИХ-фильтра составляет от 0,1 Гц до 1 Гц, а
второй цифровой фильтр является вторым БИХ-фильтром; при этом предпочтительная частота второго БИХ-фильтра составляет от 0,1 Гц до 1 Гц.
6. Система по любому из предыдущих пунктов, в котором:
первое электронное устройство (1) выполнено с возможностью приема одного или более сигналов от блока (3) обработки и снабжено первым источником (16) тактового сигнала, подключенным к первому логическому блоку (11) управления,
второе электронное устройство (2) выполнено с возможностью приема одного или более сигналов от блока (3) обработки и снабжено вторым источником (26) тактового сигнала, подключенным ко второму логическому блоку (21) управления,
блок (3) обработки выполнен с возможностью отправки одного или более сигналов на каждое из электронных устройств (1, 2) и снабжен третьим источником (36) тактового сигнала, причем третий источник (36) тактового сигнала подключен к третьему логическому блоку (31) управления, и
третий логический блок (31) управления выполнен с возможностью:
- отправки синхросигнала на первое электронное устройство (1) и на второе электронное устройство (2) для синхронизации первого источника (16) тактового сигнала и второго источника (26) тактового сигнала с третьим источником (36) тактового сигнала.
7. Система по п. 6, в которой третий логический блок (31) управления блока (3) обработки выполнен с возможностью отправки упомянутого синхросигнала, когда шина (10) совершила заданное количество оборотов.
8. Система по любому из пп. 1-5, в которой третий логический блок (31) управления блока (3) обработки выполнен с возможностью:
сохранения соответствующего момента времени приема, когда третий логический блок (31) управления принимает значение отфильтрованной угловой скорости вокруг оси y (ω1y’), связанной с первым электронным устройством (1), и значение отфильтрованной угловой скорости вокруг оси y (ω2y’), связанной со вторым электронным устройством (2), на основании времени, установленного третьим источником (36) тактового сигнала,
получения:
- момента времени, когда первое электронное устройство (1) сохранило значение упомянутой дополнительной отфильтрованной угловой скорости вокруг оси y (ω1y’), вычитание в момент времени приема первого интервала  времени, относящегося ко времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости вокруг оси y (ω1y’) на блок (3) обработки и второго временного интервала
времени, относящегося ко времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости вокруг оси y (ω1y’) на блок (3) обработки и второго временного интервала  вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость вокруг оси y (ω1y’) достигла упомянутого блока (3) обработки, и
вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость вокруг оси y (ω1y’) достигла упомянутого блока (3) обработки, и
- момента времени, когда второе электронное устройство (2) сохранило значение упомянутой дополнительной отфильтрованной угловой скорости вокруг оси y (ω2y’), вычитание в момент времени приема дополнительного первого интервала  времени, относящегося к времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости вокруг оси y (ω2y’) на блок (3) обработки и дополнительного второго интервала
времени, относящегося к времени, прошедшему между получением и передачей значения упомянутой дополнительной отфильтрованной угловой скорости вокруг оси y (ω2y’) на блок (3) обработки и дополнительного второго интервала  времени вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость вокруг оси y (ω2y’) достигла упомянутого блока (3) обработки,
времени вследствие времени, необходимого для того, чтобы упомянутая дополнительная отфильтрованная угловая скорость вокруг оси y (ω2y’) достигла упомянутого блока (3) обработки,
вычисления интервала времени между упомянутыми двумя полученными моментами времени.
9. Способ измерения проскальзывания между шиной (10) и ободом (20), на котором смонтирована шина (10), посредством системы по любому из предыдущих пунктов, при котором:
A) получают значение по меньшей мере одной угловой скорости вокруг оси y (ω1y) и значение по меньшей мере одного линейного ускорения вдоль оси x (A1x), связанное с первым электронным устройством (1),
B) фильтруют посредством первого цифрового фильтра значение упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω1y) для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω1y’) и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A1x) для получения по меньшей мере одного отфильтрованного углового ускорения вдоль оси x (A1x’),
C) идентифицируют каждый момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно заданному значению,
D) сохраняют:
- каждый момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно упомянутому заданному значению, и
- значение отфильтрованной угловой скорости вокруг оси y (ω1y’) в каждый момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A1x’) равно упомянутому заданному значению,
E) получают значение упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω2y) и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A2x), связанных с упомянутым вторым электронным устройством (2),
F) фильтруют посредством второго цифрового фильтра значение упомянутой по меньшей мере одной угловой скорости вокруг оси y (ω2y) для получения по меньшей мере одной отфильтрованной угловой скорости вокруг оси y (ω2y’) и значение упомянутого по меньшей мере одного линейного ускорения вдоль оси x (A2x) для получения по меньшей мере одного отфильтрованного линейного ускорения вдоль оси x (A2x’),
G) идентифицируют каждый дополнительный момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
H) сохраняют:
- каждый дополнительный момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
- значение отфильтрованной угловой скорости вокруг оси y (ω2y’) в каждый дополнительный момент времени, когда значение отфильтрованного линейного ускорения вдоль оси x (A2x’) равно упомянутому заданному значению,
I) вычисляют угол (α) согласно следующей формуле:
где
- количество интервалов времени,
- среднее значение отфильтрованных угловых скоростей вокруг оси y, заданное значением отфильтрованной угловой скорости вокруг оси y (ω1y’) в момент времени соответствующего интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x (A1x’) равно заданному значению, и из значения отфильтрованной угловой скорости вокруг оси y (ω2y’) в дополнительный момент времени упомянутого интервала времени, в который соответствующее отфильтрованное линейное ускорение вдоль оси x (A2x’) равно упомянутому заданному значению,
- соответствующий интервал , , … времени заданный моментом , , … времени, в котором отфильтрованное линейное ускорение вдоль оси x (A1x’), связанной с первым электронным устройством (1), равно соответствующему заданному значению, и дополнительный момент , , … времени, в котором отфильтрованное линейное ускорение вдоль оси x (A2x’), связанной со вторым электронным устройством (2), равно упомянутому заданному значению, причем каждый момент , , … времени находится за пределами интервала времени, в течение которого участок упомянутой шины (10) входит в контакт с землей и затем теряет контакт с землей,
J) сравнивают вычисленное значение угла (α) со значением угла αref приведения,
K) если значение угла (α) отличается от значения угла αref приведения, вычисляют разность между значением угла (α) и значением угла αref для измерения проскальзывания шины (10) относительно обода (20).
| WO 2016151544 A1, 29.09.2016 | |||
| JP 2007278801 A, 25.10.2007 | |||
| FR 3042281 A1, 14.04.2017. |
