Область техники
Настоящее изобретение относится к системе для измерения длины пятна контакта шины.
В частности, настоящее изобретение относится к конструкции системы, выполненной с возможностью измерения длины транспортного средства (в частности, сельскохозяйственного транспортного средства), когда шина эксплуатируется, на основании хорды, стягивающей угол между осью, проходящей через центр шины и первую точку контакта между участком упомянутой шины и землей, и второй осью, проходящей через центр шины и вторую точку контакта между упомянутым участком упомянутой шины и землей, за пределами которого упомянутый участок упомянутой шины теряет контакт с землей.
Система содержит по меньшей мере первое электронное устройство, применяемое при использовании на внутренней поверхности или внешней поверхности шины, и блок обработки, внешний по отношению к упомянутому по меньшей мере первому электронному устройству.
Предпочтительно, упомянутая система дополнительно содержит второе электронное устройство, применяемое на ободе, и каждое электронное устройство выполнено с возможностью по меньшей мере получения, фильтрации, сохранения данных и отправки упомянутых данных на блок обработки, и упомянутый блок обработки выполнен с возможностью по меньшей мере получения упомянутых данных и обработки упомянутых данных для измерения пятна контакта шины.
Выражение «пятно контакта» означает поверхность контакта между шинной и землей.
Упомянутая поверхность контакта является уменьшенной поверхностью относительно общих размеров шины.
Настоящее изобретение также относится к способу измерения длины пятна контакта шины на земле.
Уровень техники
Как известно, форма пятна контакта шины задается длиной (т.е. продольным размером пятна контакта) и шириной (т.е. поперечным размером пятна контакта).
При одной и той же нагрузке, действующей на шину, длина пятна контакта упомянутой шины изменяется согласно давлению накачки шины:
i. при высоком давлении в шине, длина пятна контакта шины на земле уменьшается (другими словами, просадка шины на земле ограничивается),
ii. при низком давлении в шине, длина пятна контакта шины на земле больше, чем длина пятна контакта в вышеописанной ситуации (другими словами, просадка шины на земле высока).
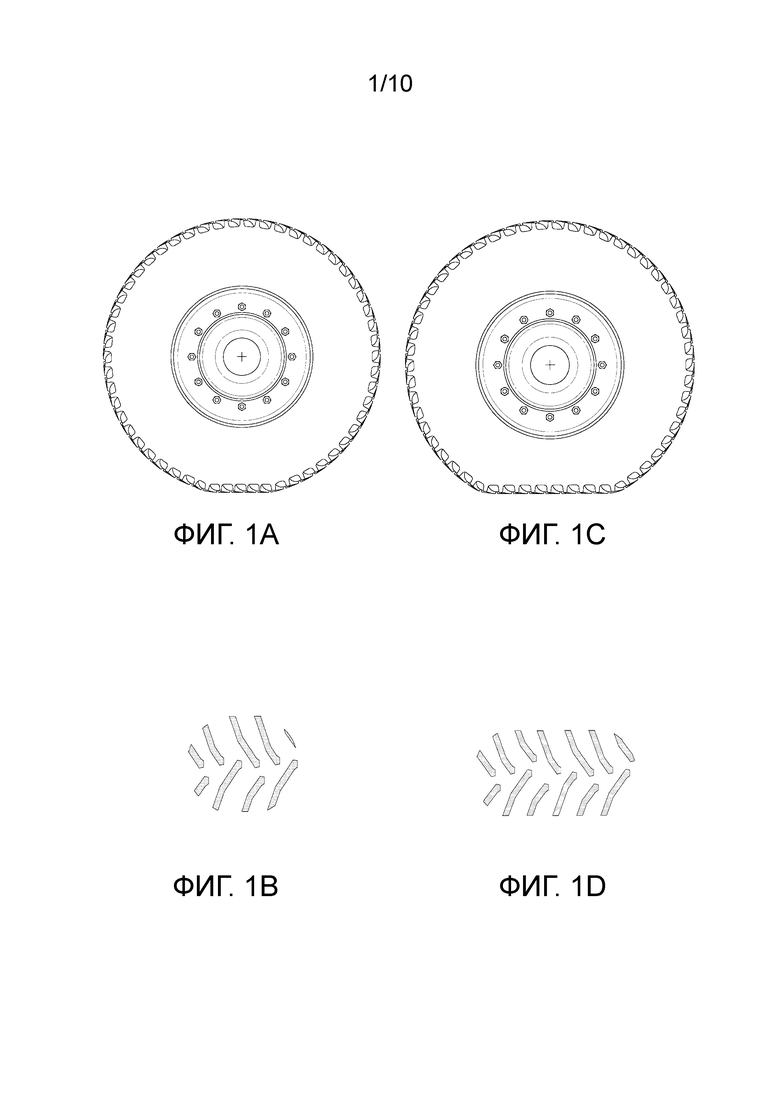
На фиг. 1A и 1B соответственно показана шина сельскохозяйственного транспортного средства и ее пятно контакта, при высоком давлении упомянутой шины.
На фиг. 1C и 1D соответственно показана шина сельскохозяйственного транспортного средства и ее пятно контакта, при низком давлении упомянутой шины.
Такие факторы, как тяга, уплотнение грунта и расход топлива на единицу площади поверхности, обрабатываемой сельскохозяйственным транспортным средством, зависят от пятна контакта сельскохозяйственного транспортного средства.
В настоящее время система, способная измерять длину зоны контакта между шиной и землей известна и описана в патентной заявке WO 2019/101849 A1.
Упомянутая система содержит блок отслеживания, связанный с шиной, в котором упомянутый блок отслеживания содержит датчик для измерения по меньшей мере описательной величины деформаций шины при использовании.
В частности, в ходе вращения шины, упомянутая величина измеряется в определенное время с частотой дискретизации. Для каждого измерения упомянутой величины, система способна определять, имеет ли измеренного значение величины, представляющей прохождение блока отслеживания в соответствии с упомянутой площадью контакта, для получения первого количества проходов блока отслеживания в соответствии с площадью контакта в течение интервала времени.
Параметр оценивается на основании значения упомянутого количества, упомянутой частоты дискретизации и упомянутого интервала времени, и отслеживание шины базируется на упомянутом оцененном параметре.
Измерение длины упомянутой площади контакта базируется на статистическом подходе, в частности, на вероятности «p», что блок отслеживания располагается в соответствии с площадью контакта в ходе вращения шины.
Чем больше значение упомянутого параметра, тем больше время, когда упомянутый блок отслеживания располагается в соответствии с упомянутой площадью контакта в течение интервала времени и, таким образом, тем больше вероятность нахождения блока отслеживания в соответствии с площадью контакта в ходе вращение шины.
Например, эта вероятность «p» может быть равна отношению количества измерений, представляющих проходы блока отслеживания в соответствии с площадью контакта и количеством измерений, согласно следующей формуле:
PL=2πRp,
где
R - радиус шины.
Однако упомянутая система известного типа имеет недостаток ввиду того, что она не способна вычислять длину пятна контакта с высокой точностью, поскольку присутствие датчика в зоне пятна контакта не определена, но описана вероятностью.
Другие системы для измерения длины пятна контакта шины раскрыты, например, в документах JP 2012-218682 A, EP 2679411 A2 и FR 3042281 A1.
Сущность изобретения
Целью настоящего изобретения является преодоление упомянутых недостаток, обеспечение системы и способа измерения длины пятна контакта шины транспортного средства на земле, в частности, сельскохозяйственного транспортного средства, для оценивания, как эта длина изменяется согласно давлению шины и/или нагрузке, действующей на упомянутую шину.
Таким образом, задачей изобретения является система для измерения длины пятна контакта шины, содержащий:
- первое электронное устройство, подлежащее размещению, при использовании, на внутренней поверхности или на внешней поверхности шины,
- второе электронное устройство, подлежащее размещению, при использовании, в контакте с ободом, на котором смонтирована упомянутая шина,
- блок 3 обработки, внешний по отношению к упомянутым электронным устройствам, причем:
первая система координат x1, y1, z1 связана с первым электронным устройством таким образом, что ось x1 является касательной к траектории кругового движения первой точки, которая является точкой упомянутой шины в которой упомянутое первое электронное устройство применяется, и ось z1 перпендикулярна к упомянутой оси x1,
вторая система координат x2, y2, z2 связана со вторым электронным устройством таким образом, что ось x2 является касательной к траектории кругового движения второй точки, которая является точкой упомянутого обода в котором упомянутое второе электронное устройство применяется, и ось z2 перпендикулярна к упомянутой оси x2.
упомянутое первое электронное устройство выполнено с возможностью по меньшей мере отправки данных на упомянутый блок обработки и содержит внутри:
- первый блок инерциальных измерений, содержащий первый гироскоп и первый акселерометр, выполненный с возможностью получения, посредством упомянутого первого гироскопа, множества значений, связанного по меньшей мере с угловой скоростью вокруг оси y, или, посредством упомянутого первого акселерометра, множества значений, связанных по меньшей мере с линейным ускорением вдоль оси x или множества значений, связанных по меньшей мере с линейным ускорением вдоль оси z,
- первое средство хранения для хранения данных,
- первый логический блок управления, соединенный с упомянутым первым инерциальным измерением и с упомянутым первым средством хранения, и выполненный с возможностью:
принимать от упомянутого первого блока инерциальных измерений:
каждое значение упомянутого линейного ускорения вдоль оси x, или
каждое значение упомянутого линейного ускорения вдоль оси z, или
каждое значение упомянутой угловой скорости вокруг оси y,
фильтровать посредством первого цифрового фильтра:
каждое значение упомянутого линейного ускорения вдоль оси x для получения отфильтрованного линейного ускорения вдоль оси x, или
каждое значение упомянутого линейного ускорения вдоль оси z для получения отфильтрованного линейного ускорения вдоль оси z, или
каждое значение упомянутой угловой скорости вокруг оси y для получения отфильтрованной линейной угловой скорости вокруг оси y,
идентифицировать первый момент времени в соответствии с первой точкой контакта между участком упомянутой шины и землей, когда упомянутый участок упомянутой шины входит в контакт с землей, и второй момент времени, в соответствии со второй точкой контакта между упомянутым участком упомянутой шины и землей, за пределами которого упомянутый участок упомянутой шины теряет контакт с землей; где упомянутым первым моментом времени и упомянутым вторым моментом времени являются соответственно:
начальный момент времени и конечный момент времени участка разрывности синусоиды, связанной с упомянутым отфильтрованным линейным ускорением вдоль оси x, или
начальный момент времени и конечный момент времени участка разрывности синусоиды, связанной с упомянутым отфильтрованным линейным ускорением вдоль оси z, или
начальный момент времени и конечный момент времени участка разрывности синусоиды, связанной с упомянутой отфильтрованной угловой скоростью вокруг оси y,
вычислять интервал времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
сохранять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени в упомянутом первом средстве хранения,
отправлять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени на упомянутый блок обработки.
Упомянутое второе электронное устройство выполнено с возможностью по меньшей мере отправки данных на упомянутый блок обработки и содержит внутри:
- второй блок инерциальных измерений, содержащий второй гироскоп, выполненный с возможностью получения, посредством упомянутого второго гироскопа, множества значений, связанного по меньшей мере с угловой скоростью вокруг оси y,
- второе средство хранения для хранения данных,
- второй логический блок управления, подключенный к упомянутому второму блоку инерциальных измерений и к упомянутому второму средству хранения, и выполненный с возможностью:
принимать от второго блока инерциальных измерений значения упомянутой угловой скорости вокруг оси y,
фильтровать посредством второго цифрового фильтра каждое значение упомянутой угловой скорости вокруг оси y для получения соответствующей отфильтрованной угловой скорости вокруг оси y,
идентифицировать соответствующий момент t2y' времени, связанный с каждым значением упомянутой отфильтрованной угловой скорости вокруг оси y,
сохранять в заданных интервалах времени в упомянутом втором средстве хранения каждое значение упомянутой отфильтрованной угловой скорости вокруг оси y и соответствующего момента t2y' времени,
отправлять на упомянутый блок обработки каждое значение упомянутой отфильтрованной угловой скорости вокруг оси y и соответствующего момента t2y' времени,
упомянутый блок обработки выполнен с возможностью по меньшей мере принимать данные от упомянутого первого электронного устройства и от упомянутого второго электронного устройства и содержит внутри:
- третье средство хранения для хранения данных,
- третий логический блок управления, подключенный к упомянутому третьему средству хранения, и выполненный с возможностью:
принимать упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени от упомянутого первого электронного устройства,
принимать значения упомянутой отфильтрованной угловой скорости вокруг оси y, отправленные упомянутым вторым электронным устройством, а также соответствующие моменты t2y' времени,
вычислять среднее значение отфильтрованных угловых скоростей вокруг оси y, связанной с упомянутым вторым электронным устройством, в соответствии с каждым моментом t2y' времени в упомянутом интервале времени,
вычислять угол между первой осью, проходящей через центр шины и упомянутую первую точку контакта, и второй осью, проходящей через центр шины и упомянутую вторую точку контакта, согласно следующей формуле:
вычислять длину пятна контакта шины по следующей формуле:
где  - радиус качения шины.
- радиус качения шины.
Дополнительные предпочтительные варианты осуществления системы раскрыты в зависимых пунктах формулы изобретения.
Настоящее изобретение относится также к способу измерения длины пятна контакта шины, посредством вышеупомянутой системы.
Упомянутый способ содержит следующие этапы:
A) получение:
множества значений, связанных с линейным ускорением вдоль оси x, связанной с первым электронным устройством, или
множества значений, связанных с линейным ускорением вдоль оси z, связанной с первым электронным устройством, или
множества значений, связанных с угловой скоростью вокруг оси y, связанной с первым электронным устройством,
B) фильтрация:
каждого значения упомянутого линейного ускорения вдоль оси x для получения отфильтрованного линейного ускорения вдоль оси x, или
каждого значения упомянутого линейного ускорения вдоль оси z для получения отфильтрованного линейного ускорения вдоль оси z, или
каждого значения упомянутой угловой скорости вокруг оси y для получения отфильтрованной угловой скорости вокруг оси y,
C) идентификация первого момента времени, в первой точке контакта между участком упомянутой шины и землей, когда упомянутый участок упомянутой шины входит в контакт с землей, и второй момент времени, во второй точке контакта между упомянутым участком упомянутой шины и землей, за пределами которого упомянутый участок упомянутой шины теряет контакт с землей; где упомянутым первым моментом времени и упомянутым вторым моментом времени являются соответственно:
начальный момент времени и конечный момент времени участка разрывности синусоиды, связанной с упомянутым отфильтрованным линейным ускорением вдоль оси x, или
начальный момент времени и конечный момент времени участка разрывности синусоиды, связанной с упомянутым отфильтрованным линейным ускорением вдоль оси z, или
начальный момент времени и конечный момент времени участка разрывности синусоиды, связанной с упомянутой отфильтрованной угловой скоростью вокруг оси y,
D) вычисление интервала времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
вычисление интервала времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
E) сохранение упомянутого первого момента времени, второго момента времени и упомянутого интервала времени,
F) получение множества значений, связанных с по меньшей мере упомянутой угловой скоростью вокруг оси y, связанной со вторым электронным устройством,
G) фильтрация каждого значения упомянутой угловой скорости вокруг оси y для получения соответствующей отфильтрованной угловой скорости вокруг оси y,
H) идентификация соответствующего момента t2y' времени, связанного с каждым значением упомянутой отфильтрованной угловой скорости вокруг оси y,
I) сохранение в заданных интервалах времени каждого значения упомянутой отфильтрованной угловой скорости вокруг оси y и соответствующего момента t2y' времени,
J) вычисление среднего значения отфильтрованных угловых скоростей вокруг оси y, связанной с упомянутым вторым электронным устройством, в соответствии с каждым моментом t2y' времени в упомянутом интервале времени,
K) вычисление угла между первой осью, проходящей через центр шины и первую точку контакта, и второй осью, проходящей через центр шины и вторую точку контакта, согласно следующей формуле:
L) вычисление длины пятна контакта шины по следующей формуле:
где - радиус качения шины.
Краткое описание чертежей
Настоящее изобретение будет описано далее, в целях иллюстрации, но не ограничения, согласно его варианту осуществления, с конкретной ссылкой на прилагаемые чертежи, в которых:
фиг. 1A и 1B - соответственно шина сельскохозяйственного транспортного средства и ее пятно контакта, при высоком давлении шины;
фиг. 1C и 1D - соответственно шина сельскохозяйственного транспортного средства и ее пятно контакта, при низком давлении шины;
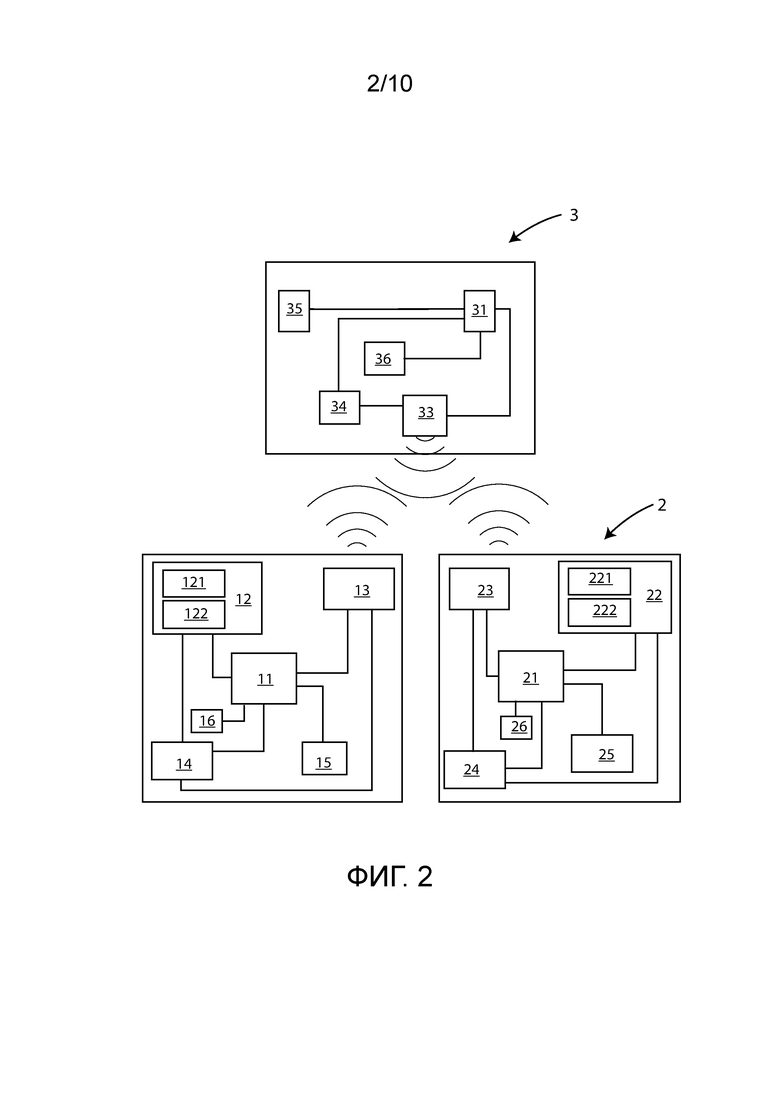
фиг. 2 - схема компонентов первого варианта осуществления системы, содержащей первое электронное устройство, второе электронное устройство и блок обработки, внешний по отношению к упомянутым электронным устройствам, в котором длина пятна контакта вычисляется на основании информации, относящейся к линейному ускорению вокруг оси x, связанной с первым электронным устройством;
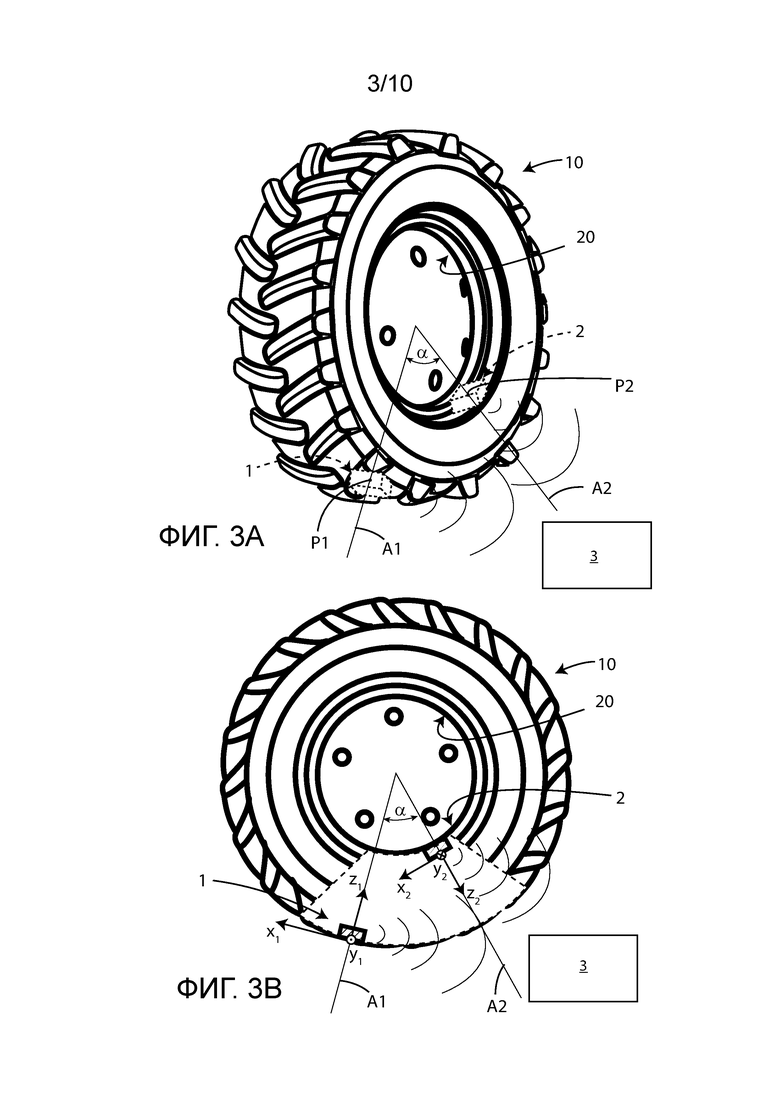
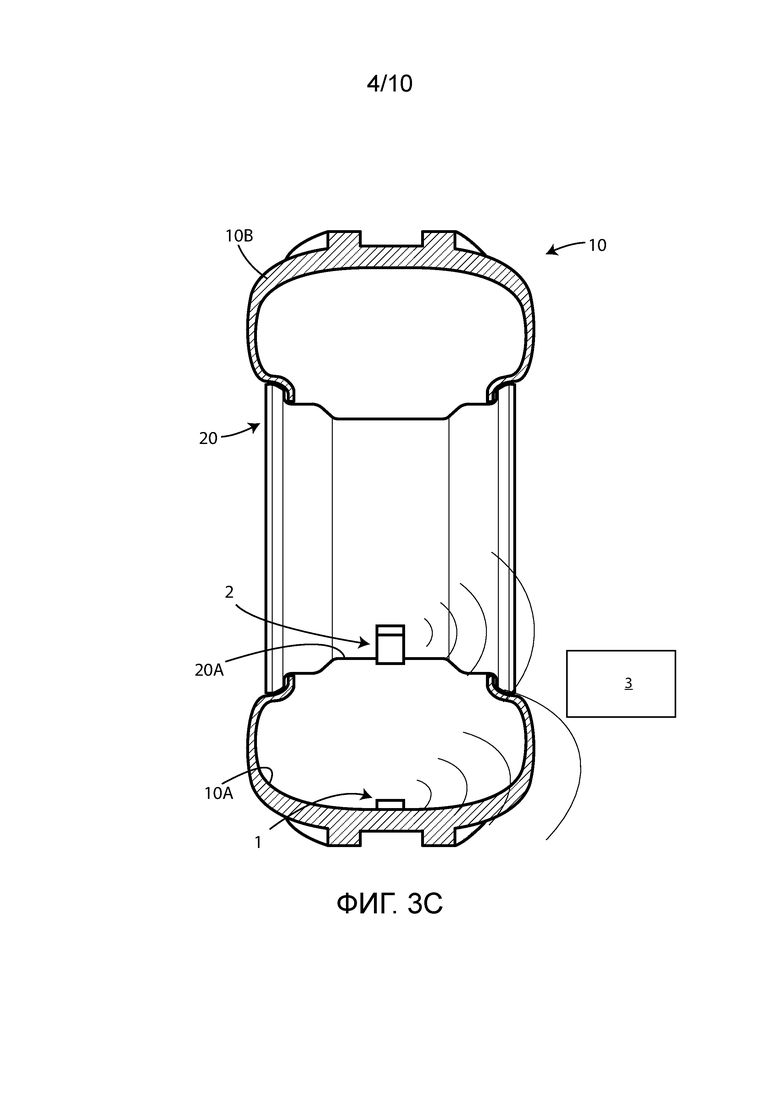
фиг. 3A - вид в перспективе колеса, содержащего шину и обод, на которой смонтирована шина, демонстрирующий первое электронное устройство, размещенное внутри шины, чтобы контактировать с внутренней поверхностью самой шины, второе электронное устройство, размещенное в выемке упомянутого обода, и блок обработки;
фиг. 3B - вид сбоку колеса с фиг. 2A;
фиг. 3C - вид спереди колеса с фиг. 2A;
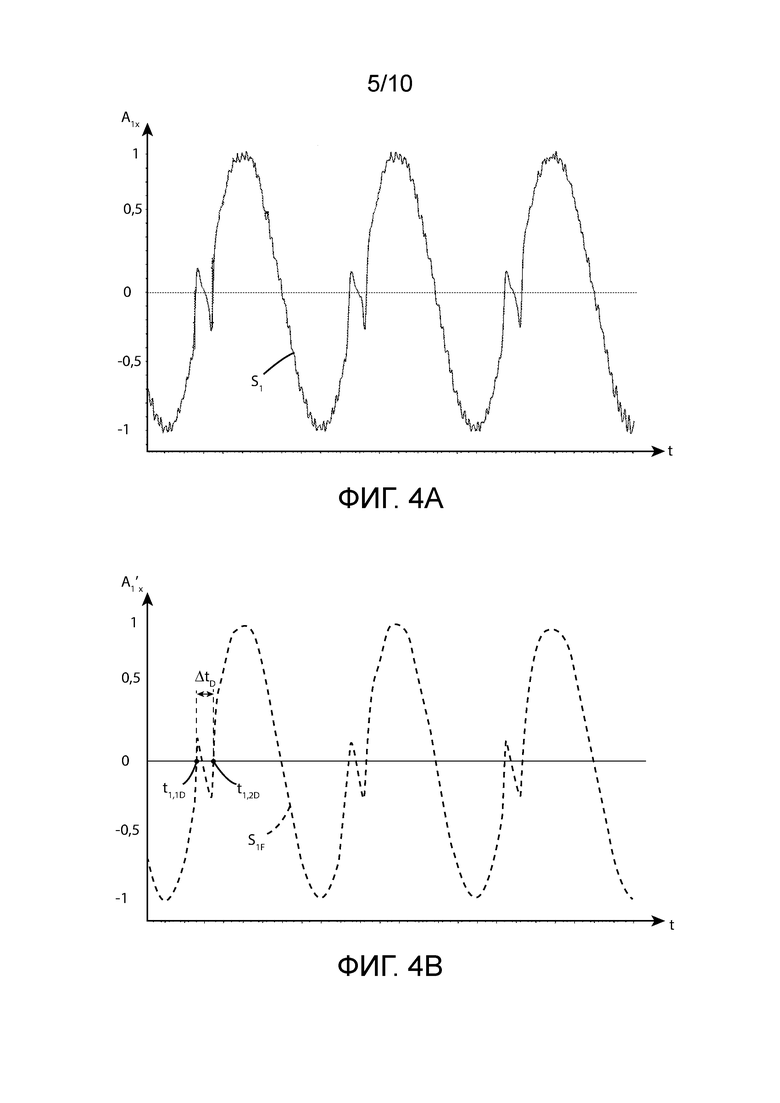
фиг. 4A - синусоида в координатной плоскости, представляющая линейное ускорение вдоль оси x, связанной с первым электронным устройством, когда шина эксплуатируется;
фиг. 4B - синусоида в координатной плоскости, представляющая линейное ускорение вдоль оси x, отфильтрованное первым БИХ-фильтром, когда шина эксплуатируется;
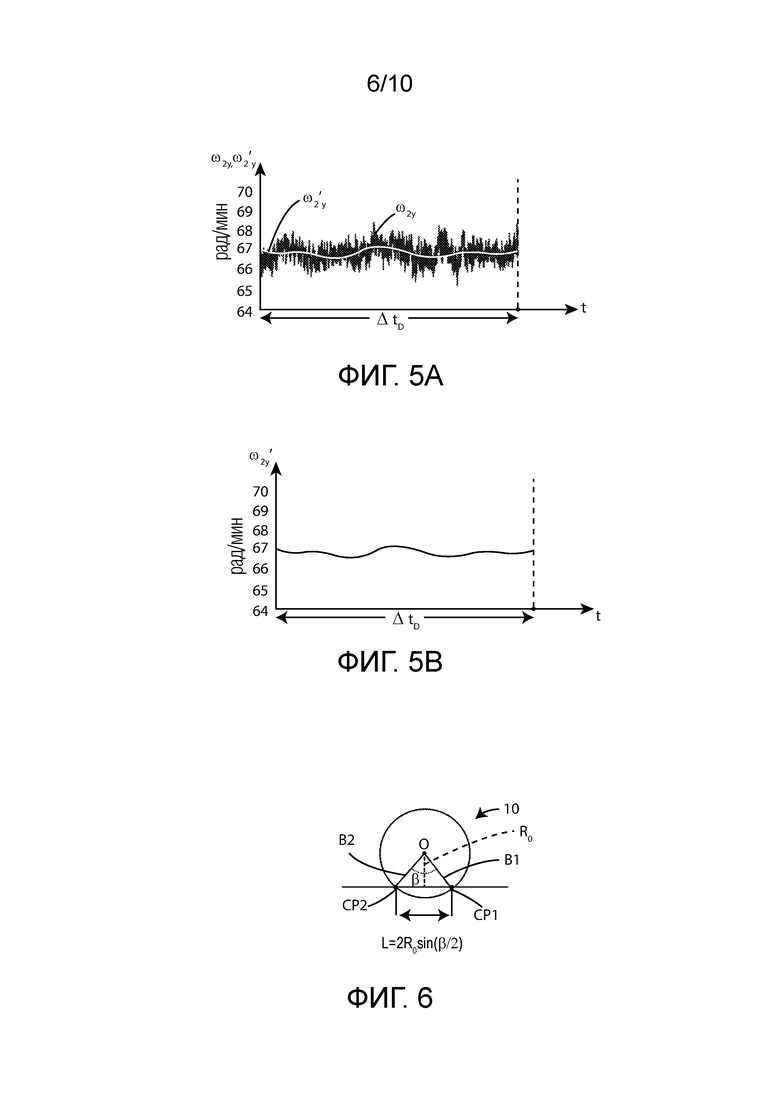
фиг. 5A - тренд двух участков угловой скорости вокруг оси y, связанной со вторым электронным устройством, в интервале  времени, соответственно до и после применения второго БИХ-фильтра, когда используется второе электронное устройство;
времени, соответственно до и после применения второго БИХ-фильтра, когда используется второе электронное устройство;
фиг. 5B - тренд участка в координатной плоскости отфильтрованной угловой скорости вокруг оси y, связанной со вторым электронным устройством, в упомянутом интервале времени;
фиг. 6 - схема, демонстрирующая шину, представленную периферией и длиной пятна контакта упомянутой шины, по существу равной длине хорды, стягивающей угол между первой осью, проходящей через центр шины и первую точку контакта между участком упомянутой шины и землей, и второй осью, проходящей через центр шины и вторую точку контакта между упомянутым участком упомянутой шины и землей, за пределами которого упомянутый участок упомянутой шины теряет контакт с землей;
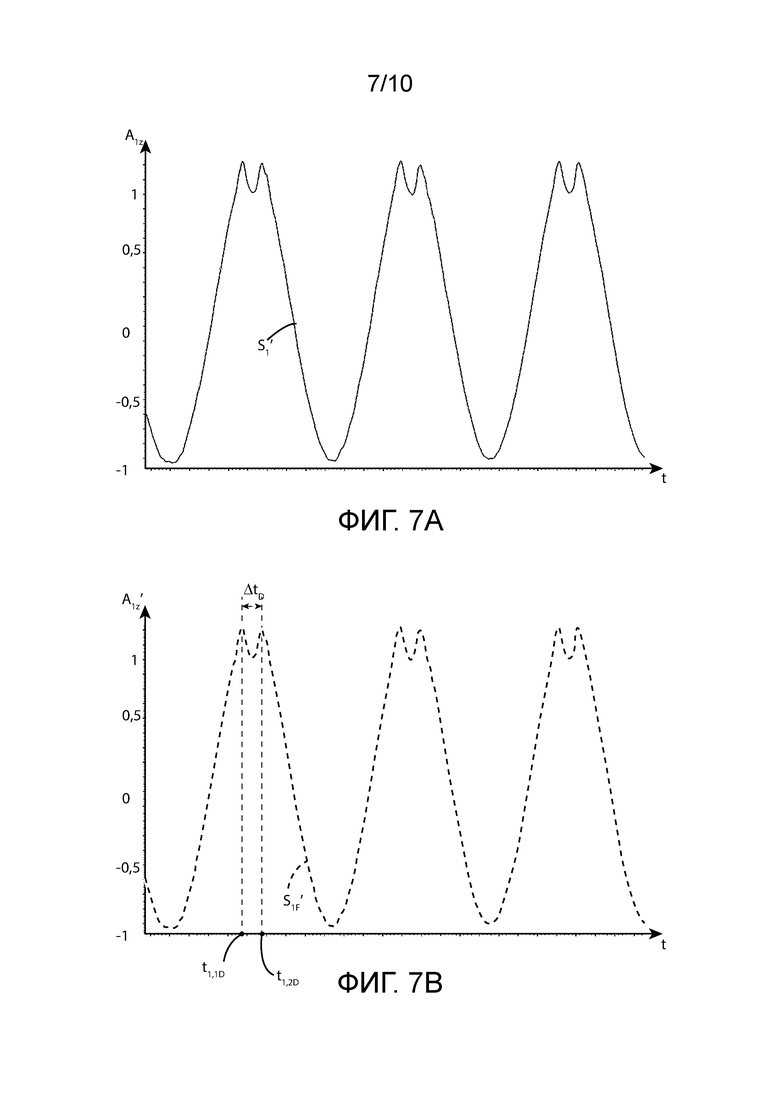
фиг. 7A - синусоида в координатной плоскости, представляющая линейное ускорение вдоль оси z, связанное с первым электронным устройством, когда шина эксплуатируется, где упомянутая синусоида означает второй вариант осуществления системы, задача изобретения, в котором компоненты системы идентичны компонентам системы с фиг. 2 (т.е. первому электронному устройству, второму электронному устройству и блоку обработки), и длина пятна контакта вычисляется на основании информации, касающейся упомянутого линейного ускорения вдоль оси z;
фиг. 7B - синусоида в координатной плоскости, представляющая линейное ускорение вдоль оси z, отфильтрованное первым БИХ-фильтром, когда шина эксплуатируется;
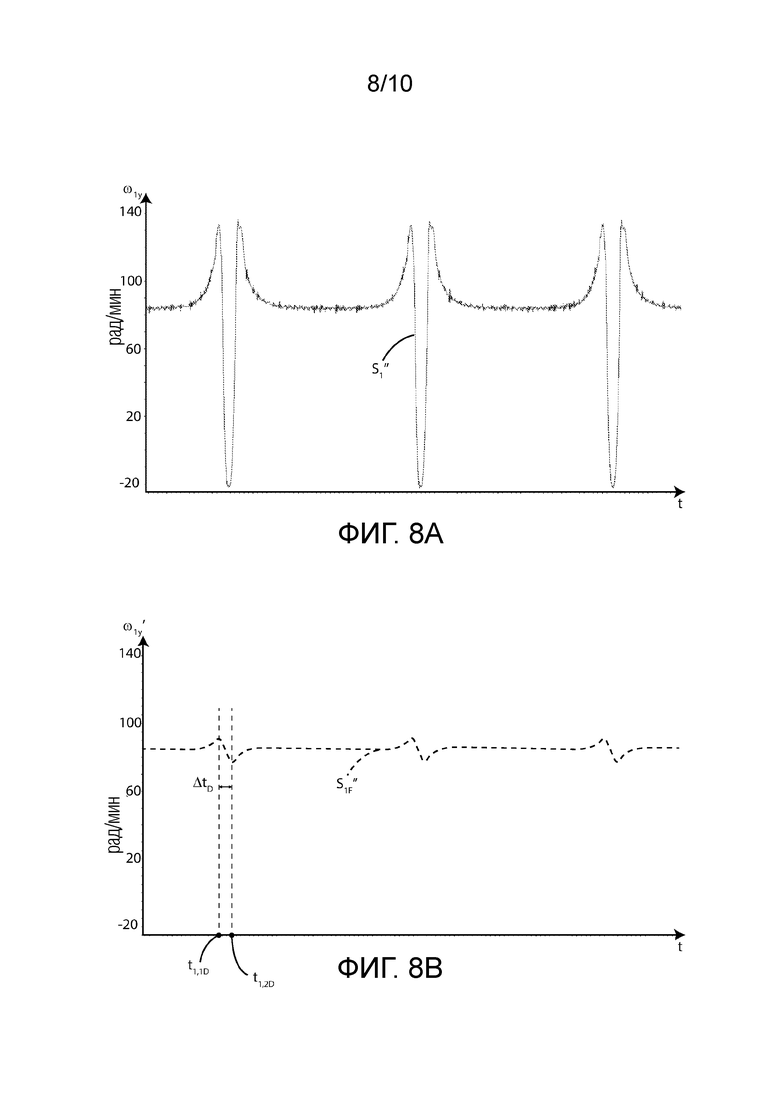
фиг. 8A - синусоида в координатной плоскости, представляющая угловую скорость вокруг оси y, связанной с первым электронным устройством, когда шина эксплуатируется, где упомянутая синусоида означает третий вариант осуществления системы, задача изобретения, в котором компоненты системы идентичны компонентам системы с фиг. 2 (т.е. первому электронному устройству, второму электронному устройству и блоку обработки), и длина пятна контакта вычисляется на основании информации, касающейся упомянутая угловая скорость вокруг оси x;
фиг. 8B - синусоида в координатной плоскости, представляющая угловую скорость вокруг оси y, отфильтрованную первым БИХ-фильтром, когда шина эксплуатируется;
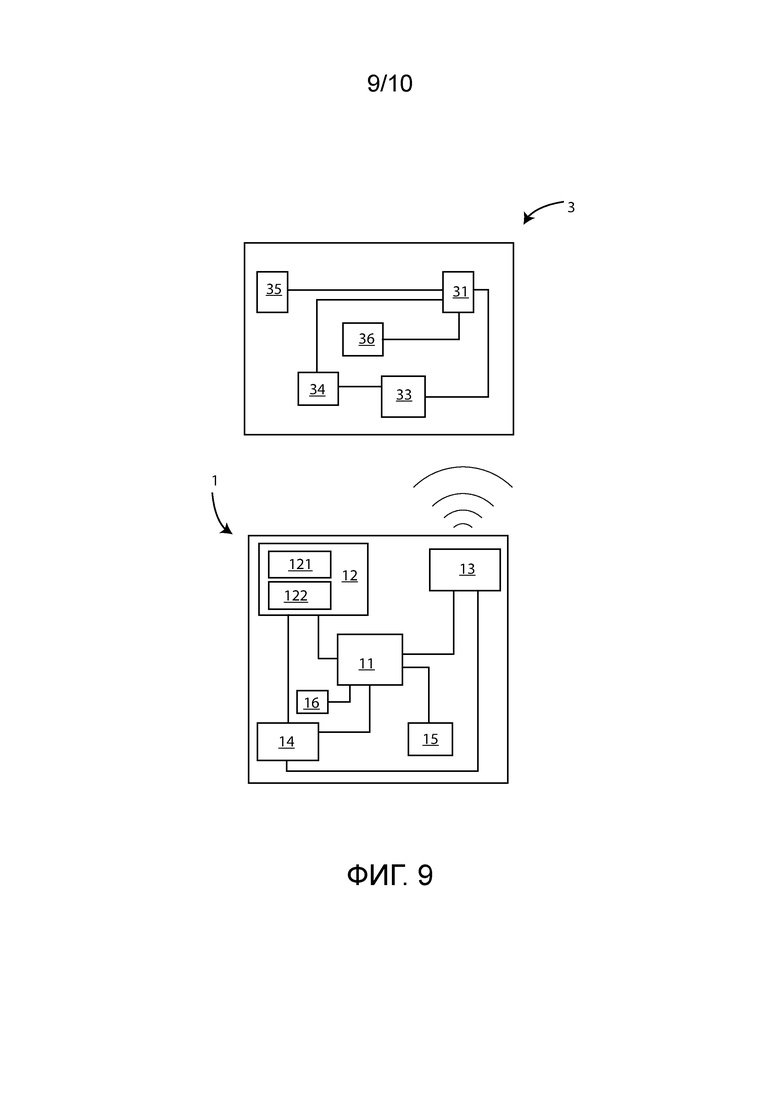
фиг. 9 - схема компонентов четвертого варианта осуществления системы, содержащей первое электронное устройство и блок обработки, внешний по отношению упомянутому электронному устройству;
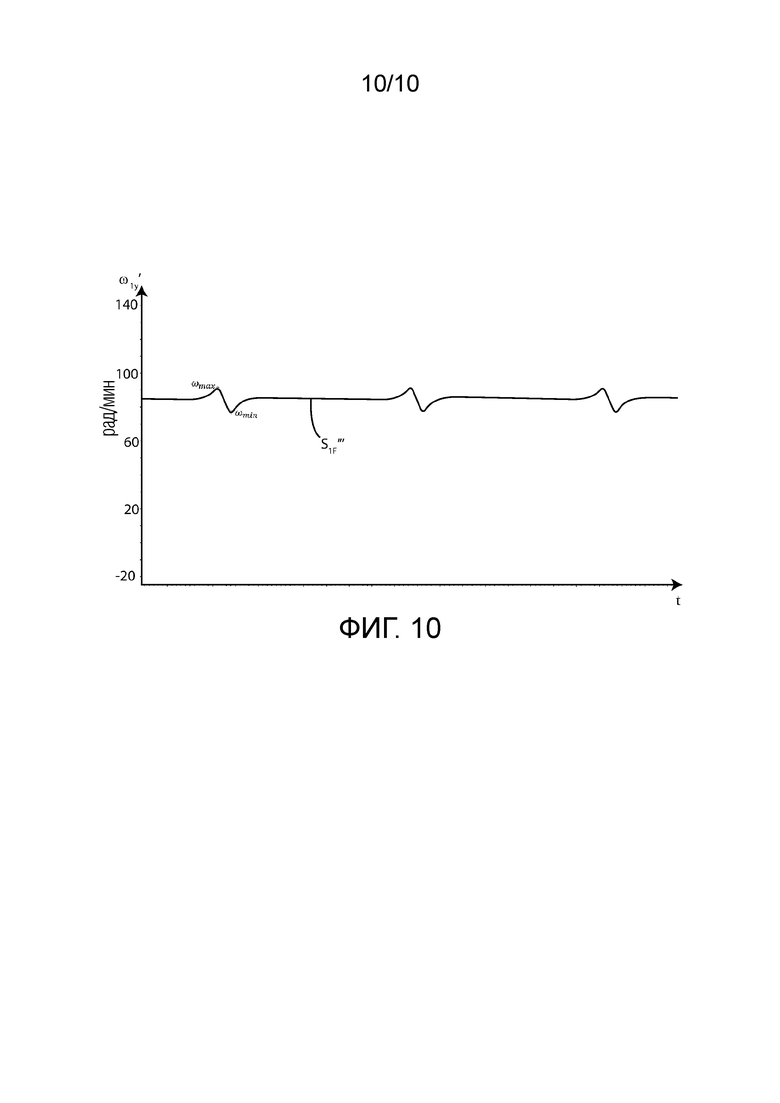
фиг. 10 - синусоида в координатной плоскости, представляющая угловую скорость вокруг оси y, отфильтрованную первым БИХ-фильтром, когда шина эксплуатируется.
Подробное описание изобретения
Со ссылкой на фиг. 2-6 будет описан первый вариант осуществления системы для измерения длины пятна контакта шины 10.
Упомянутая система содержит:
- первое электронное устройство 1, подлежащее размещению, при использовании, на внутренней поверхности 10A или на внешней поверхности 10B шины 10,
- второе электронное устройство 2, подлежащее размещению, при использовании, в контакте с ободом 20, в частности, в раскрытом варианте осуществления, в выемке 20A обода 20, на котором упомянутая шина 10) смонтирован, и
- блок 3 обработки, внешний по отношению к упомянутым электронным устройствам 1, 2.
В раскрытом варианте осуществления, первая система координат x1, y1, z1 связана с первым электронным устройством 1 таким образом, что ось x1 является касательной к траектории кругового движения первой точки P1 которая является точкой шины 10, в которой применяется упомянутое первое электронное устройство 1, и ось z1 перпендикулярна к упомянутой оси x1, и вторая система координат x2, y2, z2 связана со вторым электронным устройством 2 таким образом, что ось x2 является касательной к траектории кругового движения второй точки P2 которая является точкой упомянутого обода 20 в котором упомянутое второе электронное устройство 2 применяется, и ось z2 перпендикулярна к упомянутой оси x2.
Угол между первой осью A1 и второй осью A2 обозначен α.
Ось x1 и ось z1 первой системы координат располагаются на одной и той же первой плоскости.
Ось x2 и ось z2 второй системы координат располагаются на одной и той же второй плоскости.
В раскрытом варианте осуществления, упомянутая вторая плоскость параллельна или по существу параллельна упомянутой первой плоскости.
Однако, хотя это не показано на чертежах, упомянутая первая плоскость и упомянутая вторая плоскость могут совпадать.
Кроме того, в раскрытом варианте осуществления, упомянутое первое электронное устройство 1 располагается на внутренней поверхности 10A шины 10.
Однако, упомянутое первое электронное устройство может располагаться на внешней поверхности 10B шины 10, без отклонения от объема изобретения.
Длина пятна контакта шины 10 вычисляется на основании угла β между первой осью B1, проходящей через центр O шины 10 и первую точку CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй осью B2, проходящей через центр шины и вторую точку CP2 контакта между упомянутым участком упомянутой шины 10 и землей, за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей (упомянутые точки контакта показаны на фиг. 6).
В частности, длина пятна контакта шины по существу задается хордой, которая стягивает упомянутый угол, в котором упомянутая хорда является хордой, размещенной в периферии, которая представляет шину.
Со ссылкой на первое электронное устройство 1, упомянутое первое электронное устройство 1 содержит внутри:
- первое средство 14 подачи питания для подачи питания на упомянутое первое электронное устройство 1,
- первый беспроводной приемопередающий модуль 13 для передачи и приема сигналов/данных на/от упомянутого блока 3 обработки,
- первый блок 12 инерциальных измерений, содержащий первый акселерометр 122, выполненный с возможностью:
получать, посредством упомянутого первого акселерометра 122, множество значений, связанных по меньшей мере с линейным ускорением A1x вдоль оси x, где, в описанном варианте осуществления, значение упомянутого первого линейного ускорения A1x вдоль оси x является значением, нормализованным относительно единичного значения (т.е. значение первого линейного ускорения A1x вдоль оси x составляет от -1 до +1),
- первое средство 15 хранения для хранения данных,
- первый логический блок 11 управления, соединенный с упомянутым первым блоком 12 инерциального измерения, с упомянутым первым беспроводным приемопередающим модулем 13 и с упомянутым первым средством 15 хранения, и выполненный с возможностью:
принимать от упомянутого первого блока 12 инерциальных измерений упомянутого первого электронного устройства 1 значения упомянутого линейного ускорения A1x вдоль оси x,
фильтровать посредством первого цифрового фильтра каждое значение упомянутого линейного ускорения A1x вдоль оси x для получения соответствующего отфильтрованного линейного ускорения A1x' вдоль оси x,
идентифицировать первый момент  времени, в соответствии с первой точкой CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй момент
времени, в соответствии с первой точкой CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй момент  времени, в соответствии со второй точкой CP2 контакта между упомянутым участком упомянутой шины 10 и землей, но за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей;
времени, в соответствии со второй точкой CP2 контакта между упомянутым участком упомянутой шины 10 и землей, но за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей;
вычислять интервал  времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
сохранять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени в упомянутом первом средстве 15 хранения,
отправлять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени на упомянутый блок 3 обработки.
Другими словами, первая точка CP1 контакта является начальной точкой контакта между участком упомянутой шины 10 и землей, и вторая точка CP2 контакта является конечной точкой контакта между одним и тем же участком упомянутой шины 10 и землей (за пределами упомянутой второй точкой CP2 контакта упомянутый участок упомянутой шины 10 теряет контакт с землей).
Со ссылкой на первый цифровой фильтр, в раскрытом варианте осуществления, упомянутый первый цифровой фильтр является первым БИХ-фильтром (с бесконечной импульсной характеристикой).
В частности, предпочтительно, чтобы упомянутый первый БИХ-фильтр имел частоту от 0,1 Гц до 1 Гц.
Первый логический блок 11 управления может быть выполнен с возможностью отправки упомянутого интервала времени на блок 3 обработки, когда шина 10 совершила заданное первое количество оборотов.
Преимущественно, передача данных на блок 3 обработки первым электронным устройством 1 после заданного первое количества оборотов позволяет обеспечивать энергосбережение.
Со ссылкой на первый блок инерциальных измерений, упомянутый первый блок 12 инерциальных измерений содержит первый гироскоп 121 и выполнен с возможностью:
получать, посредством упомянутого первого гироскопа 121, по меньшей мере угловую скорость ω1y вокруг оси y,
отправлять упомянутую по меньшей мере одну угловую скорость ω1y вокруг оси y на упомянутый блок 3 обработки.
На фиг. 4A показана синусоида S1, которая представляет линейное ускорение A1x вдоль оси x, связанной с первым электронным устройством 1 (т.е. электронным устройством, размещенным на внутренней поверхности 10A шины 10).
Упомянутая синусоида S1 показывает, как линейное ускорение A1x вдоль оси x, связанной с первым электронным устройством 1, изменяется по времени.
Как можно видеть из фиг. 4A, синусоида S1 периодически испытывает разрыв вследствие того, что соответствующий участок шины 10 сначала входит в контакт с землей и затем теряет контакт с землей.
Разрывность обнаруживается посредством первого электронного устройства 1, которое располагается на внутренней поверхности 10A шины 10.
Синусоида S1F, отфильтрованная первым БИХ-фильтром, показанным на фиг. 4B, имеет такую же разрывность с интервалом времени хотя и менее выраженную, чем синусоида S1 (т.е. синусоида, когда первый БИХ-фильтр не применяется).
Следовательно, длительность этого интервала времени задается временем, когда участок упомянутой шины 10 контактирует с землей и остается в контакте с землей, пока тот же участок упомянутой шины не потеряет контакт с землей.
При использовании, шина 10 осуществляет множество оборотов.
Со ссылкой на первое электронное устройство 1, для каждого вращение шины 10, два момента времени идентифицируются и сохраняются: первый момент времени, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй момент времени, когда упомянутый участок упомянутой шины 10 все еще контактирует с землей, но за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей.
Вращательное движение шины 10 представляется синусоидой, и моменты времени соответствуют точкам, где синусоида пересекает ось абсцисс координатной плоскости, где по упомянутой оси абсцисс отложено время, и по оси ординат отложено линейное ускорение A1x вдоль оси x, связанной с первым электронным устройством 1.
В описанном примере, упомянутое средство 15 хранения являются внешними по отношению к первому логическому блоку 11 управления.
Однако, упомянутое первое средство 15 хранения может быть включено в упомянутый первый логический блок 11 управления, без отклонения от объема изобретения.
С конкретной ссылкой на второе электронное устройство 2, как упомянуто выше, в раскрытом варианте осуществления, упомянутое второе электронное устройство 2 располагается в выемке 20A обода 20.
Однако, упомянутое второе электронное устройство 2 может располагаться на ободе 20 в любой позиции, например, на внешней поверхности обода, т.е. поверхности обращенный к наружу, или даже на диске обода, без отхода от объема изобретения.
Упомянутое второе электронное устройство 2 содержит внутри:
- второе средство 24 подачи питания для подачи питания на упомянутое второе электронное устройство 2,
- второй беспроводной приемопередающий модуль 23 для передачи и приема сигналов/данных на/от упомянутого блока 3 обработки,
- второй блок 22 инерциальных измерений, содержащий второй гироскоп 221, выполненный с возможностью:
получать, посредством упомянутого второго гироскопа 221, множество значений связанный по меньшей мере с угловой скоростью ω2y вокруг оси y,
- второе средство 25 хранения для хранения данных,
- второй логический блок 21 управления, подключенный к упомянутому второму блоку 22 инерциальных измерений, к упомянутому второму беспроводному приемопередающему модулю 23 и к упомянутому второму средству 25 хранения, и выполненный с возможностью:
принимать от второго блока 22 инерциальных измерений значения упомянутой угловой скорости ω2y вокруг оси y,
фильтровать каждое значение угловой скорости ω2y вокруг оси y посредством второго цифрового фильтра для получения соответствующей отфильтрованный угловой скорости ω2y' вокруг оси y,
идентифицировать соответствующий момент t2y' времени, связанный с каждым значением упомянутой отфильтрованный угловой скорости ω2y' вокруг оси y,
сохранять в заданных интервалах времени в упомянутом втором средстве 25 хранения значения упомянутой отфильтрованной угловой скорости ω2y' вокруг оси y и соответствующие моменты t2y' времени,
передавать на упомянутый блок 3 обработки значения упомянутой отфильтрованной угловой скорости ω2y' вокруг оси y и соответствующие моменты t2y' времени.
Со ссылкой на второй цифровой фильтр, в раскрытом варианте осуществления, упомянутый второй цифровой фильтр является вторым БИХ-фильтром.
В частности, предпочтительно, чтобы упомянутый второй БИХ-фильтр имел частоту от 0,1 Гц до 1 Гц.
Этап сохранения значений отфильтрованной угловой скорости ω2y' вокруг оси y и соответствующий момент t2y' времени может осуществляться в заданных интервалах времени. Упомянутые заданные интервалы времени могут выбираться таким образом, чтобы этап сохранения осуществлялся периодически.
Со ссылкой на второй блок 22 инерциальных измерений, упомянутый второй блок 22 инерциальных измерений содержит второй акселерометр 222 и выполнен с возможностью:
получать, посредством упомянутого второго акселерометра 222, множество значений, связанных с по меньшей мере линейное ускорение A2x вдоль оси x,
отправлять значения упомянутого линейного ускорения вдоль A2x оси x на упомянутый блок 3 обработки.
Второй логический блок 21 управления может быть выполнен с возможностью отправки на блок 3 обработки значений отфильтрованной угловой скорости ω2y' вокруг оси y и соответствующих моментов t2y' времени, связанных с каждым значением отфильтрованной угловой скорости ω2y' вокруг оси y, когда шина 10 совершила заданное второе количество оборотов.
Преимущественно, передача данных на блок 3 обработки упомянутым вторым электронным устройством 2 после заданного второго количества оборотов позволяет обеспечивать энергосбережение.
Со ссылкой на цифровые фильтры, в частности, вышеупомянутые КИХ-фильтры, эти КИХ-фильтры позволяют устранить шум, в основном, вследствие вибраций, механических передач и нарушений земли.
Со ссылкой на оба электронные устройства 1, 2 системы, каждое электронное устройство 1, 2 соответственно прикреплено к шине 10 и к ободу 20 посредством соответствующего крепления устройства, устойчивого к пыли и воде (не показано).
С конкретной ссылкой на блок 3 обработки, упомянутый блок 3 обработки содержит внутри:
- третье средство подачи питания 34 для подачи питания на упомянутый блок 3 обработки
- третий беспроводной приемопередающий модуль 33 для передачи и приема сигналов/данных на/от упомянутого первого электронного устройства 1 и упомянутого второго электронного устройства 2,
- третье средство 35 хранения для хранения данных,
- третий логический блок 31 управления, подключенный к упомянутому третьему беспроводному приемопередающему модулю 33, к упомянутому третьему средству 34 подачи питания и к упомянутому третьему средству 35 хранения, и выполненный с возможностью:
принимать упомянутый первый момент времени и упомянутый второй момент времени от упомянутого первого электронного устройства 1, а также интервал времени,
принимать значения упомянутой отфильтрованной угловой скорости ω2y' вокруг оси y упомянутым вторым электронным устройством 2, а также соответствующие моменты t2y' времени связанный с каждым значением отфильтрованной угловой скорости ω2y' вокруг оси y,
вычислять среднее значение  отфильтрованных угловых скоростей вокруг оси y, связанной с упомянутым вторым электронным устройством 2 в каждый момент t2y' времени в упомянутом интервале времени,
отфильтрованных угловых скоростей вокруг оси y, связанной с упомянутым вторым электронным устройством 2 в каждый момент t2y' времени в упомянутом интервале времени,
вычислять угол β между первой осью B1, проходящей через центр O шины 10 и упомянутую первую точку CP1 контакта, и второй осью B2, проходящей через центр O шины 10 упомянутая вторая точка CP2 контакта, согласно следующей формуле:
вычислять длину пятна контакта шины 10 по следующей формуле:
где - радиус качения шины 10.
Как можно видеть, пятно контакта длина является по существу мерой длины хорды, которая стягивает угол между первой осью B1 (т.е. осью, проходящей через центр шины и первой точкой CP1 контакта между упомянутой шиной 10 и землей) и второй осью B2 (т.е. ось, проходящая через центр шины и вторую точку CP2 контакта между упомянутым участком упомянутой шины 10 и землей).
На фиг. 6 показана схема шины 10, представленной периферией, имеющей центр O и радиус качения, где угол β существует между первой осью B1 (проходящей через центр шины и первую точку CP1 контакта) и второй осью B2 (проходящей через центр шины и вторую точку CP2 контакта).
Как можно видеть из фиг. 6, длина пятна контакта шины аппроксимируется длиной хорды, которая соединяет упомянутую первую точку CP1 контакта и упомянутую вторую точку CP2 контакта и стягивает упомянутый угол (ограниченный первой осью B1 и второй осью B2).
Кроме того, упомянутое первое электронное устройство 1 может быть снабжено первым источником 16 тактового сигнала, подключенным к первому логическому блоку 11 управления, и упомянутое второе электронное устройство 2 может быть снабжено вторым источником 26 тактового сигнала, подключенным ко второму логическому блоку 21 управления, и упомянутый блок 3 обработки может быть снабжен третьим источником 36 тактового сигнала, подключенным к третьему логическому блоку управления.
Во втором варианте осуществления, описанном иначе, чем первый вариант осуществления, упомянутый первый блок 12 инерциальных измерений, включенный в первое электронное устройство 1, выполнен с возможностью:
получать, посредством упомянутого первого акселерометра 122, по меньшей мере первое линейное ускорение A1z вдоль оси z.
Следовательно, первый логический блок 11 управления выполнен с возможностью:
принимать от первого блока 12 инерциальных измерений упомянутого первого электронного устройства 1, значение упомянутого по меньшей мере одного линейного ускорения A1z вдоль оси z,
фильтр посредством a первый цифровой фильтр значение упомянутого по меньшей мере одного линейного ускорения A1z вдоль оси z для получения отфильтрованного линейного ускорения A1z' вдоль оси z,
идентифицировать первый момент времени, в первой точке CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй момент времени, во второй точке CP2 контакта между упомянутым участком упомянутой шины 10 и землей, но за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей,
вычислять интервал времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
сохранять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени в упомянутом первом средстве 15 хранения,
отправлять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени на упомянутый блок 3 обработки.
На фиг. 7A показана синусоида S1' которая представляет линейное ускорение A1z вдоль оси z, связанное с первым электронным устройством 1 (т.е. электронным устройством, размещенным на внутренней поверхности 10A шины 10) в упомянутом втором варианте осуществления.
Упомянутая синусоида S1' показывает, как линейное ускорение S1' вдоль оси z, связанное с первым электронным устройством 1, изменяется по времени.
Как можно видеть из фиг. 7A, синусоида S1' периодически испытывает разрыв вследствие того, что участок упомянутой шины 10 сначала входит в контакт с землей и затем теряет контакт с землей.
Синусоида, отфильтрованная первым цифровым фильтром и обозначенная S1F' на фиг. 7B, имеет такую же разрывность в соответствии с соответствующим интервалом времени, хотя и менее выраженную, чем синусоида S1' (т.е. синусоида, когда первый цифровой фильтр не применялся).
Со ссылкой на второе электронное устройство 2, упомянутое второе электронное устройств 2 работает так же, как второе электронное устройство, описанное для первого варианта осуществления.
Со ссылкой на блок 3 обработки, упомянутый блок 3 обработки работает так же, как блок 3 обработки, описанный для первого варианта осуществления.
В третьем варианте осуществления, отличающемся от первого варианта осуществления и второго варианта осуществления, интервал времени между первым моментом времени и вторым моментом  времени вычисляется согласно значению угловой скорости ω1y вокруг оси y, связанной с первым электронным устройством 1.
времени вычисляется согласно значению угловой скорости ω1y вокруг оси y, связанной с первым электронным устройством 1.
Следовательно, первый логический блок 11 управления выполнен с возможностью:
принимать от первого блока 12 инерциальных измерений упомянутого первого электронного устройства 1, значение упомянутой угловой скорости ω1y вокруг оси y,
фильтровать посредством упомянутого первого цифрового фильтра значение упомянутой угловой скорости ω1y вокруг оси y, для получения отфильтрованной угловой скорости ω1y' вокруг оси y,
идентифицировать первый момент  времени, в первой точке CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй момент времени, во второй точке CP2 контакта между упомянутым участком упомянутой шины 10 и землей, но за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей,
времени, в первой точке CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второй момент времени, во второй точке CP2 контакта между упомянутым участком упомянутой шины 10 и землей, но за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей,
вычислять интервал времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
сохранять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени в первом упомянутом средстве 15 хранения,
отправлять упомянутый первый момент времени, упомянутый второй момент времени и упомянутый интервал времени на упомянутый блок 3 обработки.
На фиг. 8A и 8B показана в координатной плоскости соответствующая синусоида S1'', S1F'', которая представляет угловую скорость вокруг оси y, связанной с первым электронным устройством 1 (в упомянутом третьем варианте осуществления), соответственно, когда синусоида не отфильтрована первым цифровым фильтром и когда синусоида отфильтрованная первым цифровым фильтром.
Как можно видеть из фиг. 8A, синусоида S1'' периодически испытывает разрыв вследствие того, что соответствующий участок шины 10 сначала входит в контакт с землей и затем теряет контакт с землей.
Синусоида S1F'', отфильтрованная первым цифровым фильтром, показанная на фиг. 8B, имеет такую же разрывность с интервалом времени, хотя и менее выраженную, чем у синусоиды S1'' (т.е. синусоиды, когда первый цифровой фильтр не применялся).
Упомянутый интервал времени задается первым моментом времени, в котором значение отфильтрованной угловой скорости ω1y' вокруг оси y максимально (обозначено на фиг. 8B как ωMAX) и вторым моментом времени, в котором значение отфильтрованной угловой скорости ω1x' вокруг оси x минимально ((обозначено на фиг. 8B как ωMIN).
Со ссылкой на второе электронное устройство 2, упомянутое второе электронное устройств 2 работает так же, как второе электронное устройство, описанное для первого варианта осуществления.
Со ссылкой на блок 3 обработки, упомянутый блок 3 обработки работает так же, как блок 3 обработки, описанный для первого варианта осуществления.
Со ссылкой на три вышеописанных варианта осуществления, интервал времени задается первым моментом времени и вторым моментом времени, которые, на основании применяемого варианта осуществления, могут быть:
начальным моментом времени и конечным моментом времени участка разрывности синусоиды S1F, связанным с отфильтрованным линейным ускорением A1x' вдоль оси x (см. первый вариант осуществления),
начальным моментом времени и конечным моментом времени участка разрывности синусоиды S1F', связанным с отфильтрованным линейным ускорением A1z' вдоль оси z (см. второй вариант осуществления),
начальным моментом времени и конечным моментом времени участка разрывности синусоиды S1F'', связанным с отфильтрованной угловой скоростью ω1y' вокруг оси y (см. третий вариант осуществления).
Кроме того, для каждого из трех вышеописанных вариантов осуществления, упомянутый третий логический блок 31 управления блока 3 обработки может быть выполнен с возможностью:
- отправлять синхросигнал на упомянутое первое электронное устройство 1 и на упомянутое второе электронное устройство 2 для синхронизации соответствующих источников тактового сигнала с третьим источником 36 тактового сигнала упомянутого блока 3 обработки, благодаря чему все источники тактового сигнала синхронизируются, согласно заданному временному разрешению, которое может потребоваться в зависимости от обстоятельств.
Упомянутый синхросигнал предпочтительно отправлять периодически, например, когда шина 10 совершила заданное количество оборотов.
Отправка синхросигнала не требуется в случае, когда каждое из электронных устройств выполнено с возможностью только отправки данных на блок 3 обработки, и последнее выполнено с возможностью приема и обработки таких данных.
В варианте, в котором каждое электронное устройство 1, 2 выполнено с возможностью только получения, фильтрации и отправки данных на блок 3 обработки, и последнее выполнено с возможностью приема и обработки таких данных для вычисления длины пятна контакта, причем первый беспроводной приемопередающий модуль (размещенный в первом электронном устройстве 1) заменен первым модулем беспроводной передачи, второй беспроводной приемопередающий модуль (размещенный во втором электронном устройстве 2) заменен вторым модулем беспроводной передачи, и третий беспроводной приемопередающий модуль (размещенный в блоке 3 обработки) заменен модулем беспроводного приема.
Как явствует из вышеизложенного, каждое электронное устройство 1, 2 может быть выполнено с возможностью получения и отправки данных (после их фильтрации) и блок 3 обработки может быть выполнен с возможностью приема и обработки таких данных для вычисления длины пятна контакта шины, или каждое электронное устройство 1, 2 может быть выполнено с возможностью получения и передачи данных (после их фильтрации), а также приема одного или более сигналов от блока обработки (например, синхросигнала), и блок 3 обработки может быть выполнен с возможностью приема и обработки таких данных для вычисления длины пятна контакта, а также для отправки одного или более сигналов на каждое из упомянутых электронных устройств (например, синхросигнала).
Кроме того, для каждого из вышеописанных вариантов осуществления, система может состоять из первого электронного устройства 1, второго электронного устройства 2 и блока 3 обработки.
В четвертом варианте осуществления, показанном на фиг. 9, система содержит первое электронное устройство 1 и блок 3 обработки.
В этом четвертом варианте осуществления, второе электронное устройство 2 совпадает с первым электронным устройством 1, т.е. электронным устройством, размещенным на внутренней поверхности 10A шины 10.
Таким образом, информация об интервале времени и об угловой скорости вокруг оси y получаются посредством единого электронного устройства, т.е. электронного устройства, применимого в внутренней поверхности 10A шины 10.
Таким образом, в отличие от трех вышеописанных вариантов осуществления, в упомянутом четвертом варианте осуществления, система содержит единое электронное устройство, т.е. только первое электронное устройство 1, размещенное внутри шины 10, и блок 3 обработки, внешний по отношению к упомянутому первому электронному устройству 1.
Упомянутое первое электронное устройство 1 выполнено с возможностью получения и фильтрации данных и отправки сигналов/данных на упомянутый блок 3 обработки, и последний выполнен с возможностью приема упомянутых сигналов/данных и обработки таких данных.
Таким образом, посредством упомянутого первого электронного устройства 1 можно идентифицировать первый момент времени, второй момент времени и вычислять интервал времени между упомянутыми двумя моментами времени, а также получать значения угловой скорости вокруг оси y, связанной с упомянутым первым электронным устройством 1, и соответствующие моменты времени для вычисления угла β.
Следовательно, отфильтрованная угловая скорость ω2y' вокруг оси y, которая, в предыдущих вариантах осуществления, связана со вторым электронным устройством 2, равна отфильтрованной угловой скорости ω1y' вокруг оси y, которая, в предыдущих вариантах осуществления, связана с первым электронным устройством 1, единственном электронном устройстве в этом четвертом варианте осуществления.
Поэтому в четвертом варианте осуществления среднее значение отфильтрованных угловых скоростей вокруг оси y (в каждый момент времени в упомянутом интервале времени), которая, в предыдущих вариантах осуществления, связана со вторым электронным устройством 2, равно среднему значению  отфильтрованных угловых скоростей вокруг оси y (в каждый момент времени в упомянутом интервале времени), связанной с первым электронным устройством 1, единственным электронным устройством в этом варианте осуществления.
отфильтрованных угловых скоростей вокруг оси y (в каждый момент времени в упомянутом интервале времени), связанной с первым электронным устройством 1, единственным электронным устройством в этом варианте осуществления.
На фиг. 10 показана синусоида S1F''' в координатной плоскости, которая представляет отфильтрованную угловая скорость ω1y' вокруг оси y первого и единственного электронного устройства 1.
Аналогично третьему варианту осуществления, синусоида S1F''', отфильтрованная первым цифровым фильтром, показанным на фиг. 10, имеет разрывность в соответствии с интервалом времени, заданным первым моментом времени, когда значение отфильтрованной угловой скорости ω1y' вокруг оси y максимально (обозначенное на фиг. 10 как ωMAX) и вторым моментом времени, когда значение отфильтрованной угловой скорости ω1y' вокруг оси y минимально (обозначенное на фиг. 10 как ωMIN).
В этом четвертом варианте осуществления, среднее значение угловых скоростей вокруг оси y может задаваться суммой максимального значения и минимального значения угловой скорости вокруг оси y, деленной на 2.
Со ссылкой на фиг. 10, упомянутое среднее значение можно вычислять по следующей формуле:
Альтернативно, система может быть образована упомянутым первым электронным устройством 1 и упомянутым блоком 3 обработки.
Преимущественно, со ссылкой на упомянутый четвертый вариант осуществления, конструкция системы является упрощенной конструкцией относительно конструкцией системы, описанной в предыдущих вариантах осуществления.
Кроме того, энергопотребление упомянутой системы ниже, чем энергопотребление систем, описанных со ссылкой на предыдущие варианты осуществления.
Со ссылкой на второй вариант осуществления (фиг. 7A и 7B), третий вариант осуществления (фиг. 8A и 8B) и четвертый вариант осуществления (фиг. 9 и 10), упомянутый первый цифровой фильтр является первым БИХ-фильтром (с бесконечной импульсной характеристикой), как упомянуто для вышеописанного первого варианта осуществления.
Это также явствует из описания чертежей (упомянутых в перечне чертежей), связанных с соответствующими вариантами осуществления.
Настоящее изобретение также предусматривает способ измерения длины пятна контакта шины 10, посредством вышеописанной системы.
Упомянутый способ содержит следующие этапы:
A) получение:
множества значений, связанных с линейным ускорением A1x вдоль оси x, связанной с первым электронным устройством 1, или
множества значений, связанных с линейным ускорением A1z вдоль оси z, связанной с первым электронным устройством 1, или
множества значений, связанных с угловой скоростью ω1y вокруг оси y, связанной с первым электронным устройством 1,
B) фильтрация:
каждого значения упомянутого линейного ускорения A1x вдоль оси x для получения отфильтрованного линейного ускорения A1x' вдоль оси x, или
каждого значения упомянутого линейного ускорения A1z вдоль оси z для получения отфильтрованного линейного ускорения A1z' вдоль оси z, или
каждого значения упомянутой угловой скорости ω1y вокруг оси y для получения отфильтрованной угловой скорости ω1y' вокруг оси y,
C) идентификация первого момента времени, в первой точке CP1 контакта между участком упомянутой шины 10 и землей, когда упомянутый участок упомянутой шины 10 входит в контакт с землей, и второго момента времени, во второй точке CP2 контакта между упомянутым участком упомянутой шины 10 и землей, за пределами которого упомянутый участок упомянутой шины 10 теряет контакт с землей; при этом упомянутый первый момент времени и упомянутый второй момент времени представляют собой соответственно:
начальный момент времени и конечный момент времени участка разрывности синусоиды S1F связанные с упомянутым отфильтрованным линейным ускорением A1x' вдоль оси x, или
начальный момент времени и конечный момент времени участка разрывности синусоиды S1F' связанные с упомянутым отфильтрованным линейным ускорением A1z' вдоль оси z, или
начальный момент времени и конечный момент времени участка разрывности синусоиды S1F'', связанной с упомянутой отфильтрованной угловой скоростью ω1y' вокруг оси y,
D) вычисление интервала времени между упомянутым первым моментом времени и упомянутым вторым моментом времени,
E) сохранение упомянутого первого момента времени, второй момент времени и упомянутый интервал времени,
F) получение множества значений, связанных с по меньшей мере упомянутой угловой скоростью ω2y вокруг оси y, связанной со вторым электронным устройством 2,
G) фильтрацию каждого значения упомянутой угловой скорости ω2y вокруг оси y для получения соответствующей отфильтрованной угловой скорости ω2y' вокруг оси y,
H) идентификацию соответствующего момента t2y' времени, связанного с каждым значением упомянутой отфильтрованной угловой скорости ω2y' вокруг оси y,
I) сохранение в заданных интервалах времени каждого значения упомянутой отфильтрованной угловой скорости ω2y' вокруг оси y и соответствующий момент t2y' времени,
J) вычисление среднего значения  отфильтрованных угловых скоростей вокруг оси y, связанной с упомянутым вторым электронным устройством 2 в соответствии с каждым моментом t2y' времени в упомянутом интервале времени,
отфильтрованных угловых скоростей вокруг оси y, связанной с упомянутым вторым электронным устройством 2 в соответствии с каждым моментом t2y' времени в упомянутом интервале времени,
K) вычисление угла β между первой осью B1, проходящей через центр O шины 10 и первую точку CP1 контакта, и второй осью B2, проходящей через центр O шины 10 и вторую точку CP2 контакта, согласно следующей формуле:
L) вычисление длины пятна контакта шины 10 по следующей формуле:
где - радиус качения шины 10.
Со ссылкой на вышеописанные варианты осуществления системы, полученные значения будут значениями, связанными с линейным ускорением A1x вдоль оси x первого электронного устройства 1 (см. первый вариант осуществления системы) или значениями, связанными с линейным ускорением A1z вдоль оси z первого электронного устройства 1 (см. второй вариант осуществления системы) или значениями, связанными с угловой скоростью ω1y вокруг оси y первого электронного устройства 1.
Следовательно, этап фильтрации и этап идентификации первого момента времени и второго момента времени, подлежащих использованию для вычисления интервала времени между упомянутым первым моментом времени и упомянутым вторым моментом времени осуществляются для значений, полученных согласно одному из вышеописанных первых трех вариантов осуществления системы.
В четвертом варианте осуществления в котором второе электронное устройство 2 совпадает с первым электронным устройством 1, этап идентификации первого момента времени и второго момента времени, этап вычисления интервала времени между упомянутыми двумя моментами времени, а также этап получения значений угловой скорости вокруг оси y, связанной с первым электронным устройством 1, и соответствующих моментов времени для вычисления угла β, осуществляются единым электронным устройством, т.е. первым электронным устройством 1 и согласно тех же соображений, упомянутых выше со ссылкой на этот четвертый вариант осуществления.
Преимущественно, как упомянуто выше, посредством системы и способа изобретения, можно измерять длину пятна контакта шины.
Следовательно, можно отслеживать длину пятна контакта по времени, и если значение пятна контакта длина изменяется по времени, например, вследствие изменения давления в шине и/или нагрузки, действующей на упомянутую шину.
Настоящее изобретение описан в целях иллюстрации, но не ограничения, согласно его предпочтительным вариантам осуществления, но следует понимать, что изменения и/или модификации могут осуществляться специалистами в данной области техники, без отклонения от его объема, заданного в нижеследующей формуле изобретения.
Изобретение относится к системе для измерения длины пятна контакта шины (10), в частности, сельскохозяйственных машин. Система содержит первое электронное устройство (1) и второе электронное устройство (2), каждое из которых выполнено с возможностью по меньшей мере получения, фильтрации, сохранения и отправки данных, и блок (3) обработки, внешний по отношению к электронным устройствам (1, 2), выполненный с возможностью по меньшей мере принимать и обрабатывать данные, отправленные каждым электронным устройством (1, 2), для измерения длины пятна контакта на основании угла (β) между первой осью (B1), проходящей через центр (O) шины (10) и первую точку (CP1) контакта между участком шины (10) и землей, и второй осью (B2), проходящей через центр шины (10) и вторую точку (CP2) контакта между упомянутым участком шины (10) и землей. Настоящее изобретение относится также к способу измерения длины пятна контакта шины (10), который включает упомянутую выше систему. Технический результат – повышение точности измерений длины пятна контакта шины. 2 н. и 6 з.п. ф-лы, 10 ил.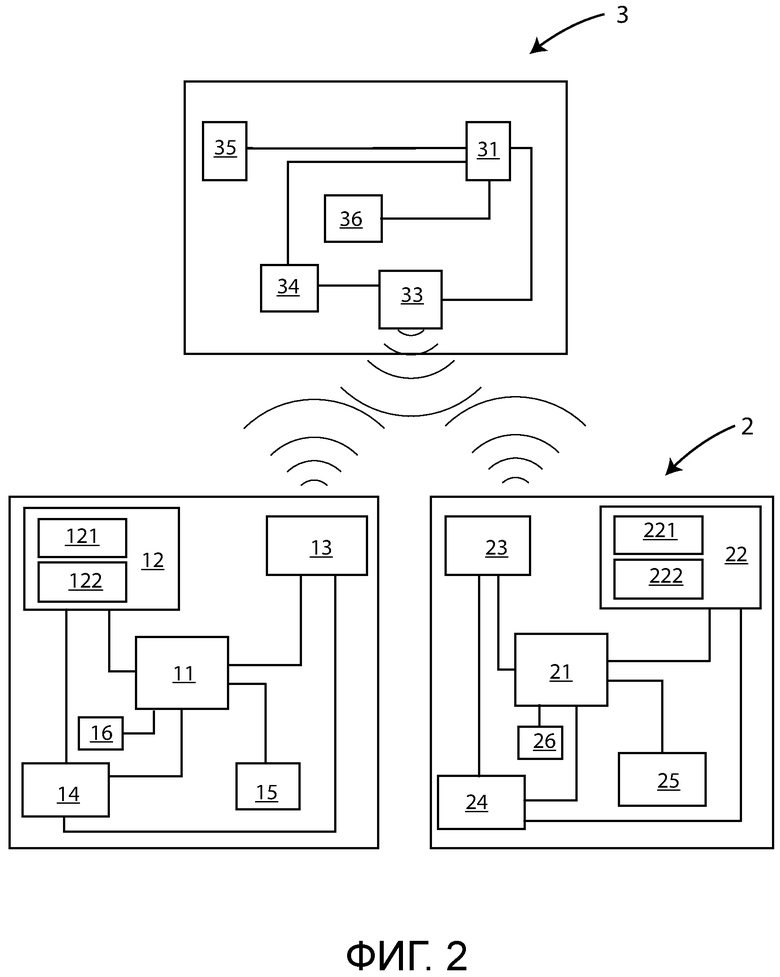
1. Система для измерения длины пятна контакта шины (10), содержащая:
- первое электронное устройство (1), подлежащее размещению, при использовании, на внутренней поверхности (10A) или на внешней поверхности (10B) шины (10),
- второе электронное устройство (2), подлежащее размещению, при использовании, в контакте с ободом (20), на котором смонтирована шина (10),
- блок (3) обработки, внешний по отношению к упомянутым электронным устройствам (1, 2), при этом:
с первым электронным устройством (1) связана первая система координат x1, y1, z1 таким образом, что ось x1 является касательной к траектории кругового движения первой точки (P1) которая является точкой шины (10), в которой применяется первое электронное устройство (1), и ось z1 перпендикулярна оси x1,
со вторым электронным устройством (2) связана вторая система координат x2, y2, z2 таким образом, что ось x2 является касательной к траектории кругового движения второй точки (P2), которая является точкой обода (20), в которой применяется второе электронное устройство (2), и ось z2 перпендикулярна оси x2,
первое электронное устройство (1) выполнено с возможностью по меньшей мере отправки данных на блок (3) обработки и содержит внутри:
- первый блок (12) инерциальных измерений, содержащий первый гироскоп (121) и первый акселерометр (122), выполненный с возможностью получения, посредством первого гироскопа (121), множества значений, связанных по меньшей мере с угловой скоростью вокруг оси y (ω1y), или, посредством первого акселерометра (122), множества значений, связанных по меньшей мере с линейным ускорением вдоль оси x (A1x), или множества значений, связанных по меньшей мере с линейным ускорением вдоль оси z (A1z),
- первое средство (15) хранения для хранения данных,
- первый логический блок (11) управления, соединенный с первым блоком (12) инерциальных измерений и с первым средством (15) хранения и выполненный с возможностью:
приема от первого блока (12) инерциальных измерений:
- каждого значения линейного ускорения вдоль оси x (A1x), или
- каждого значения линейного ускорения вдоль оси z (A1z), или
- каждого значения угловой скорости вокруг оси y (ω1y),
фильтрования посредством первого цифрового фильтра:
- каждого значения линейного ускорения вдоль оси x (A1x) для получения отфильтрованного линейного ускорения вдоль оси x (A1x'), или
- каждого значения линейного ускорения вдоль оси z (A1z) для получения отфильтрованного линейного ускорения вдоль оси z (A1z'), или
- каждого значения угловой скорости вокруг оси y (ω1y) для получения отфильтрованной линейной угловой скорости вокруг оси y (ω1y'),
идентифицирования первого момента времени ( ), в соответствии с первой точкой (CP1) контакта между участком шины (10) и землей, когда упомянутый участок шины (10) входит в контакт с землей, и второго момента времени (
), в соответствии с первой точкой (CP1) контакта между участком шины (10) и землей, когда упомянутый участок шины (10) входит в контакт с землей, и второго момента времени ( ), в соответствии со второй точкой (CP2) контакта между упомянутым участком шины (10) и землей, за пределами которого упомянутый участок шины (10) теряет контакт с землей; при этом первый момент времени () и второй момент времени () представляют собой соответственно:
), в соответствии со второй точкой (CP2) контакта между упомянутым участком шины (10) и землей, за пределами которого упомянутый участок шины (10) теряет контакт с землей; при этом первый момент времени () и второй момент времени () представляют собой соответственно:
- начальный момент времени и конечный момент времени участка разрывности синусоиды (S1F), связанные с отфильтрованным линейным ускорением вдоль оси x (A1x'), или
- начальный момент времени и конечный момент времени участка разрывности синусоиды (S1F'), связанные с отфильтрованным линейным ускорением вдоль оси z (A1z'), или
- начальный момент времени и конечный момент времени участка разрывности синусоиды (S1F''), связанные с отфильтрованной угловой скоростью вокруг оси y (ω1y'),
вычисления интервала времени ( ) между первым моментом времени () и вторым моментом времени (),
) между первым моментом времени () и вторым моментом времени (),
сохранения первого момента времени (), второго момента времени () и интервала времени () в первом средстве (15) хранения,
отправки первого момента времени (), второго момента времени () и интервала времени () на блок (3) обработки,
при этом второе электронное устройство (2) выполнено с возможностью по меньшей мере отправки данных на блок (3) обработки и содержит внутри:
- второй блок (22) инерциальных измерений, содержащий второй гироскоп (221), выполненный с возможностью получения, посредством второго гироскопа (221), множества значений, связанных по меньшей мере с угловой скоростью вокруг оси y (ω2y),
- второе средство (25) хранения для хранения данных,
- второй логический блок (21) управления, соединенный со вторым блоком (22) инерциальных измерений и со вторым средством (25) хранения и выполненный с возможностью:
приема от второго блока (22) инерциальных измерений значений угловой скорости вокруг оси y (ω2y),
фильтрования посредством второго цифрового фильтра каждого значения угловой скорости вокруг оси y (ω2y) для получения соответствующей отфильтрованной угловой скорости вокруг оси y (ω2y'),
идентифицирования соответствующего момента времени t2y', связанного с каждым значением отфильтрованной угловой скорости вокруг оси y (ω2y'),
сохранения в заданных интервалах времени во втором средстве (25) хранения каждого значения отфильтрованной угловой скорости вокруг оси y (ω2y') и соответствующего момента t2y' времени,
отправки на блок (3) обработки каждого значения отфильтрованной угловой скорости вокруг оси y (ω2y') и соответствующего момента t2y' времени,
причем блок (3) обработки выполнен с возможностью по меньшей мере приема данных от первого электронного устройства (1) и от второго электронного устройства (2) и содержит внутри:
- третье средство (35) хранения для хранения данных,
- третий логический блок (31) управления, соединенный с третьим средством (35) хранения и выполненный с возможностью:
приема первого момента времени (), второго момента времени () и интервала времени () от первого электронного устройства (1),
приема значений отфильтрованной угловой скорости вокруг оси y (ω2y'), отправленных вторым электронным устройством (2), а также соответствующих моментов t2y' времени,
вычисления среднего значения ( ) отфильтрованных угловых скоростей вокруг оси y, связанного со вторым электронным устройством (2) в соответствии с каждым моментом t2y' времени в упомянутом интервале времени (),
) отфильтрованных угловых скоростей вокруг оси y, связанного со вторым электронным устройством (2) в соответствии с каждым моментом t2y' времени в упомянутом интервале времени (),
вычисления угла (β) между первой осью (B1), проходящей через центр (O) шины (10) и первую точку (CP1) контакта, и второй осью (B2), проходящей через центр (O) шины (10) и вторую точку (CP2) контакта, согласно следующей формуле:
 ,
,
вычисления длины пятна контакта шины (10) по следующей формуле:
 ,
,
где  - радиус качения шины (10).
- радиус качения шины (10).
2. Система по п. 1, в которой
первый логический блок (11) управления первого электронного устройства (1) выполнен с возможностью отправки интервала времени () на блок (3) обработки, когда шина (10) совершила заданное первое количество оборотов, а
второй логический блок (21) управления второго электронного устройства (2) выполнен с возможностью отправки на блок (3) обработки значений отфильтрованной угловой скорости вокруг оси y (ω2y') и соответствующего момента t2y' времени, когда шина (10) совершила заданное второе количество оборотов.
3. Система по п. 1 или 2, в которой
первый цифровой фильтр является первым БИХ-фильтром, причем предпочтительная частота первого БИХ-фильтра составляет от 0,1 до 1 Гц, а
второй цифровой фильтр является вторым БИХ-фильтром, при этом предпочтительная частота второго БИХ-фильтра составляет от 0,1 до 1 Гц.
4. Система по любому из предыдущих пунктов, в которой
первое электронное устройство (1) выполнено с возможностью приема одного или более сигналов от блока (3) обработки и снабжено первым источником тактового сигнала (16), подключенным к первому логическому блоку (11) управления,
второе электронное устройство (2) выполнено с возможностью приема одного или более сигналов от блока (3) обработки и снабжено вторым источником тактового сигнала (26), подключенным ко второму логическому блоку (21) управления, и
блок (3) обработки выполнен с возможностью отправки одного или более сигналов на каждое из электронных устройств (1, 2) и снабжен третьим источником тактового сигнала (36), причем третий источник тактового сигнала (36) подключен к третьему логическому блоку (31) управления,
при этом третий логический блок (31) управления выполнен с возможностью
отправки синхросигнала на первое электронное устройство (1) и на второе электронное устройство (2) для синхронизации первого источника тактового сигнала (16) и второго источника тактового сигнала (26) с третьим источником тактового сигнала (36).
5. Система по п. 4, в которой третий логический блок (31) управления блока (3) обработки выполнен с возможностью отправки синхросигнала, когда шина (10) совершила заданное количество оборотов.
6. Система по любому из пп. 1-3, в которой второе электронное устройство (2) совпадает с первым электронным устройством (1), благодаря чему значение отфильтрованной угловой скорости вокруг оси y (ω2y') второго электронного устройства (2) совпадает со значением отфильтрованной угловой скорости вокруг оси y (ω1y') первого электронного устройства (1) и среднее значение () отфильтрованных угловых скоростей, связанное со вторым электронным устройством (2) в соответствии с каждым моментом времени в интервале времени (), совпадает со средним значением ( ) отфильтрованных угловых скоростей, связанным с первым электронным устройством (1) в соответствии с каждым моментом времени в упомянутом интервале времени ().
) отфильтрованных угловых скоростей, связанным с первым электронным устройством (1) в соответствии с каждым моментом времени в упомянутом интервале времени ().
7. Система по любому из пп. 1-3, в которой
интервал времени () задан первым моментом времени (), когда значение отфильтрованной угловой скорости вокруг оси y (ω1y') максимально, и вторым моментом времени (), когда значение отфильтрованной угловой скорости вокруг оси y (ω1y') минимально, и среднее значение угловых скоростей ( ) задано суммой упомянутого максимального значения и упомянутого минимального значения, деленной на 2.
) задано суммой упомянутого максимального значения и упомянутого минимального значения, деленной на 2.
8. Способ измерения длины пятна контакта шины (10) посредством системы по любому из предыдущих пунктов, при котором:
A) получают:
множество значений, связанных с линейным ускорением вдоль оси x (A1x), связанной с первым электронным устройством (1), или
множество значений, связанных с линейным ускорением вдоль оси z (A1z), связанной с первым электронным устройством (1), или
множество значений, связанных с угловой скоростью вокруг оси y (ω1y), связанной с первым электронным устройством (1),
B) фильтруют:
каждое значение линейного ускорения вдоль оси x (A1x) для получения отфильтрованного линейного ускорения вдоль оси x (A1x'), или
каждое значение линейного ускорения вдоль оси z (A1z) для получения отфильтрованного линейного ускорения вдоль оси z (A1z'), или
каждое значение угловой скорости вокруг оси y (ω1y) для получения отфильтрованной угловой скорости вокруг оси y (ω1y'),
C) идентифицируют первый момент времени () в первой точке (CP1) контакта между участком шины (10) и землей, когда упомянутый участок шины (10) входит в контакт с землей, и второй момент времени () во второй точке (CP2) контакта между упомянутым участком шины (10) и землей, за пределами которого упомянутый участок шины (10) теряет контакт с землей; при этом первый момент времени () и второй момент времени () представляют собой соответственно:
- начальный момент времени и конечный момент времени участка разрывности синусоиды (S1F), связанные с отфильтрованным линейным ускорением вдоль оси x (A1x'), или
- начальный момент времени и конечный момент времени участка разрывности синусоиды (S1F'), связанные с отфильтрованным линейным ускорением вдоль оси z (A1z'), или
- начальный момент времени и конечный момент времени участка разрывности синусоиды (S1F''), связанные с отфильтрованной угловой скоростью вокруг оси y (ω1y'),
D) вычисляют интервал времени () между первым моментом времени () и вторым моментом времени (),
E) сохраняют первый момент времени (), второй момент времени () и интервал времени (),
F) получают множество значений, связанных с по меньшей мере угловой скоростью вокруг оси y (ω2y), связанной со вторым электронным устройством (2),
G) фильтруют каждое значение угловой скорости вокруг оси y (ω2y) для получения соответствующей отфильтрованной угловой скорости вокруг оси y (ω2y'),
H) идентифицируют соответствующий момент t2y' времени, связанный с каждым значением отфильтрованной угловой скорости вокруг оси y,
I) сохраняют в заданных интервалах времени каждое значение отфильтрованной угловой скорости вокруг оси y (ω2y') и соответствующий момент t2y' времени,
J) вычисляют среднее значение ( отфильтрованных угловых скоростей вокруг оси y, связанной со вторым электронным устройством (2) в соответствии с каждым моментом t2y' времени в упомянутом интервале времени (),
отфильтрованных угловых скоростей вокруг оси y, связанной со вторым электронным устройством (2) в соответствии с каждым моментом t2y' времени в упомянутом интервале времени (),
K) вычисляют угол (β) между первой осью (B1), проходящей через центр (O) шины (10) и первую точку (CP1) контакта, и второй осью (B2), проходящей через центр (O) шины (10) и вторую точку (CP2) контакта, согласно следующей формуле:
,
L) вычисляют длину пятна контакта шины (10) по следующей формуле:
,
где - радиус качения шины (10).
| JP 2012218682 A, 12.11.2012 | |||
| Бесплотинная гидроэлектростанция с ковшовыми гидротурбинами (БПГЭС) | 2017 |
|
RU2679411C2 |
| FR 3042281 A1, 14.04.2017 | |||
| СИСТЕМА ОПРЕДЕЛЕНИЯ КИНЕТИЧЕСКИХ ПАРАМЕТРОВ ШИНЫ | 2016 |
|
RU2676511C2 |

