Предложенное техническое решение относится к робототехнике, в частности к системе перемещения и базирования обрабатываемых деталей, а именно заготовок лопаток газотурбинных двигателей.
Недостаточная точность перемещения обрабатываемой заготовки технологическим роботом, входящим в робототехнический комплекс, обуславливает необходимость периодического проведения контрольных замеров ее параметров. Для этого заготовка, закрепленная в приспособлении-спутник, предназначенном для захвата и переноса обрабатываемых деталей с помощью робота, перемещается в отдельно установленное устройство базирования приспособления-спутник, откуда это приспособление перехватывается другим специальным роботом, который перемещает его в систему контроля, где определяется толщина оставшегося припуска, и вновь возвращает приспособление-спутник в устройство его базирования, из которого оно извлекается соответствующим роботом для продолжения обработки заготовки. Точность измерений геометрических параметров и последующей обработки заготовки требует обеспечения постоянства технологических баз, которые определяются точностью ее установки в заданном положении в устройстве базирования приспособления-спутника на каждом этапе ее захвата и перемещения тем или иным роботом.
Известна система перемещения и базирования обрабатываемых заготовок лопаток газотурбинных двигателей, содержащая приспособление-спутник для захвата обрабатываемых заготовок и устройство базирования приспособления-спутника в заданном положении.
(Патент РФ №2481939, МПК B23Q 3/06, 2011 г.)
Данное устройство по технической сущности и достигаемому результату наиболее близко к предложенному техническому решению и, поэтому, принято в качестве его прототипа.
В известном устройстве приспособление-спутник предназначено для жесткого присоединения к конкретному захватному механизму робота, а его базирование в заданном положении осуществляется стопорением приспособления-спутника подпружиненными шариками вручную.
Недостатком этой системы является ее массивная и сложная конструкция и, в этой связи с необходимостью ручных операций, не подходящая для осуществления перемещений заготовок промышленным робототехническим комплексом, в который входят роботы и манипуляторы с различными захватными механизмами.
Задачей разработки является упрощение конструкции системы перемещения и базирования заготовок, без ухудшения точности установки в заданном положении приспособления-спутника в устройстве его базирования на каждом этапе его захвата и перемещения тем или иным роботом.
Поставленная задача решается системой перемещения и базирования обрабатываемых заготовок лопаток газотурбинных двигателей, содержащей приспособление-спутник для захвата обрабатываемых заготовок и устройство базирования приспособления-спутника в заданном положении, при этом приспособление-спутник выполнено в форме вала и оснащено фиксирующими элементами для обеспечения возможности жесткого сопряжения с механизмами его захвата, внешняя поверхность приспособления-спутника, содержит элемент конической формы, а на торце вала размещен замок для захвата обрабатываемых деталей, устройство базирования приспособления-спутника, включает коаксиально установленные цилиндрические элементы в виде наружного кольцевого основания и внутренней кольцевой втулки, внутренняя коническая поверхность которой выполнена с возможностью сопряжения с наружным элементом конической формы приспособления-спутника, причем втулка и основание устройства базирования приспособления-спутника соединены друг с другом одинаковыми, равноотстоящим друг от друга пластинчатыми, синусоидальной в поперечном сечении формы пружинами, образующие линейчатой поверхности каждой из которых параллельны оси втулки.
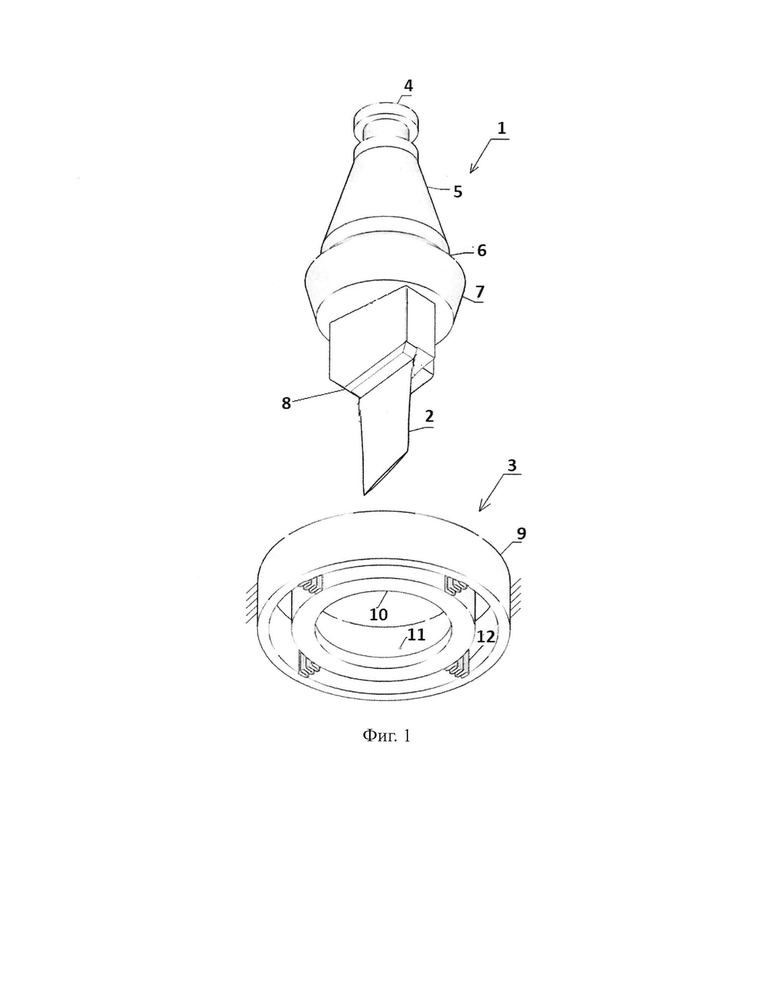
На фиг. 1 показан вид в перспективе (спереди и снизу) системы перемещения и базирования обрабатываемых деталей.
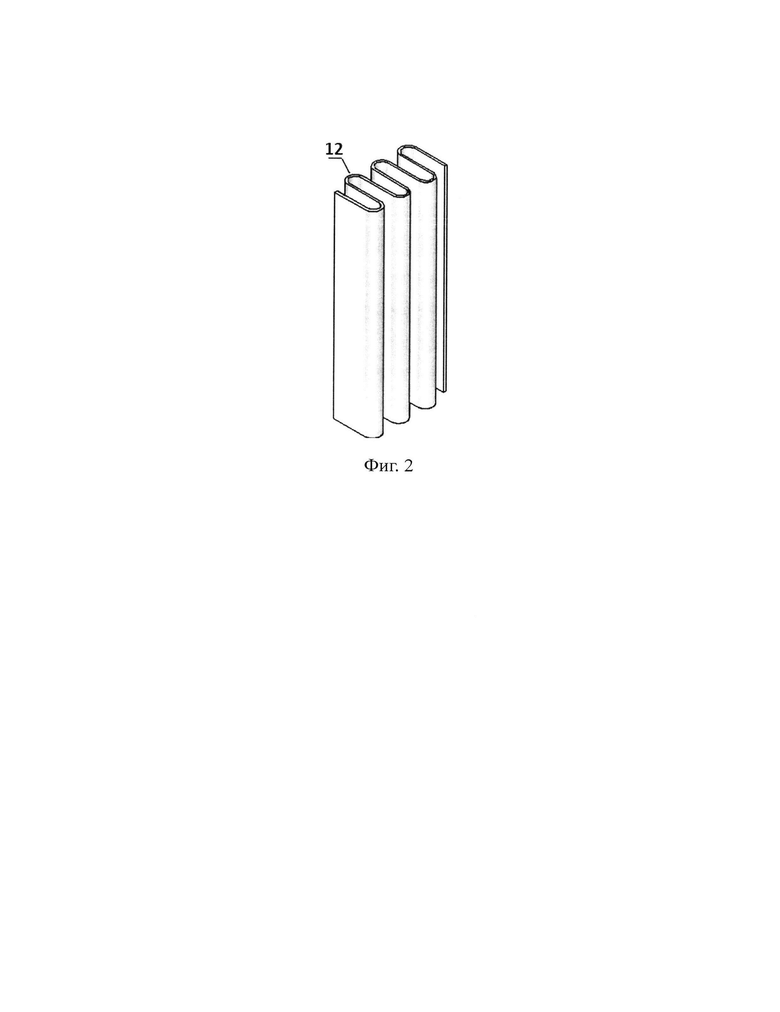
На фиг. 2 - пример выполнения пружины.
Система перемещения и базирования обрабатываемых заготовок лопаток газотурбинных двигателей, содержит, выполненное в форме вала, приспособление-спутник 1 (фиг 1) для захвата обрабатываемых заготовок 2 и устройство базирования 3 приспособления-спутника в заданном положении, при этом приспособление-спутник оснащено фиксирующими элементами в виде обода 4, фиксирующей поверхности 5, кольцевой канавки 6 для обеспечения возможности жесткого сопряжения с механизмами захвата. Наличие набора такого типа фиксаторов обеспечивает возможность захвата приспособления-спутника широким рядом захватных механизмов роботов и манипуляторов, входящих в робототехнический комплекс. Внешняя поверхность приспособления-спутника, также, содержит элемент конической формы 7, замок 8 для захвата обрабатываемых деталей, который размещен на торце вала, устройство базирования приспособления-спутника включает коаксиально установленные цилиндрические элементы в виде наружного кольцевого основания 9 и внутренней кольцевой втулки 10, внутренняя коническая поверхность 11 которой выполнена с возможностью сопряжения с наружным элементом конической формы приспособления-спутника, причем втулка и основание устройства базирования приспособления-спутника соединены друг с другом пластинчатыми, синусоидальной формы в поперечном сечении, пружинами 12 (фиг. 2), образующие линейчатой поверхности каждой из которых параллельны оси втулки. Эти пружины обеспечивают малые упругие перемещения втулки в горизонтальной плоскости по двум координатам, а также малый поворот вокруг двух горизонтальных осей.
Устройство работает следующим образом:
Заготовка 2 устанавливается в замок 8 приспособления-спутника 1. Для проведения механической обработки или контрольных замеров геометрических параметров заготовки захватный механизм робота захватывает приспособление-спутник за тот или иной фиксирующий элемент или элементы 4, 5, 6. После каждого акта обработки, контрольного замера параметров заготовки или перехода использования от одного робота робототехнического комплекса к другому роботу приспособление-спутник соответствующим роботом перемещают в устройство его базирования 3. При этом элемент конической формы 7 на внешней поверхности приспособления-спутника входит в сопряжение с внутренней конической поверхностью 11 втулки 10 устройства базирования приспособления-спутника. Ось втулки должна быть вертикальной для фиксации в ней приспособления-спутника за счет силы тяжести. Поскольку цилиндрическая втулка расположена коаксиально к жестко закрепленному цилиндрическому основанию 9 устройства базирования, благодаря одинаковым и равноотстоящим друг от друга пружинам 12, вследствие их упругой деформации, при каждом базировании приспособления-спутника обеспечивается совмещение его продольной оси с продольной осью устройства базирования, независимо от того, какой робот с какой пространственной погрешностью осуществляет эти локальные перемещения.
Упрощение системы перемещения и базирования заготовок, исключающее использования ручного труда, дает возможность применения робототехнических комплексов для изготовления лопаток газотурбинных двигателей. При этом точность установки приспособления-спутника в заданном положении при его базировании, обеспечивает точность изготовления детали с использованием различных роботов для тех или иных операций за счет постоянства технологической базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОМЕСТНОЙ ИМПУЛЬСНОЙ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ ЛОПАТОК В СОСТАВЕ РОБОТИЗИРОВАННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2590743C1 |
| Устройство для электрохимической обработки лопаток газотурбинного двигателя | 2017 |
|
RU2690904C2 |
| Система для манипулирования и закрепления обрабатываемой лопатки | 2023 |
|
RU2818554C1 |
| СПОСОБ ОБРАБОТКИ ХВОСТОВИКА И КОРНЕВОЙ ЧАСТИ ПЕРА ЛОПАТКИ НА МНОГОКООРДИНАТНОМ СТАНКЕ С ЧПУ | 2017 |
|
RU2645633C1 |
| Робототехнический комплекс | 1986 |
|
SU1458148A1 |
| СПОСОБ ФИНИШНОЙ ОБРАБОТКИ ЗАГОТОВКИ ЛОПАТКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2674358C1 |
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| СПОСОБ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ ЛОПАТОК С ДВУМЯ ХВОСТОВИКАМИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2514236C1 |
| СПОСОБ ФИНИШНОЙ ОБРАБОТКИ ЛОПАТКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629419C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
Изобретение относится к области металлообработки и может быть использовано в устройствах для перемещения и базирования обрабатываемых деталей для их обработки, например заготовок лопаток газотурбинных двигателей. Система содержит приспособление-спутник для захвата обрабатываемых заготовок и устройство для базирования приспособления-спутника в заданном положении, при этом приспособление-спутник выполнено в форме вала с фиксирующими элементами, выполненными с возможностью их захвата соответствующими механизмами робота-манипулятора, причем часть внешней поверхности вала выполнена конической формы, а на торце вала размещен замок для захвата обрабатываемых заготовок. Устройство для базирования приспособления-спутника выполнено в виде коаксиально установленных наружного кольцевого основания и внутренней кольцевой втулки, внутренняя поверхность которой выполнена конической с возможностью сопряжения с упомянутой конической поверхностью вала, причем упомянутые втулка и основание устройства для базирования приспособления-спутника соединены между собой одинаковыми равноотстоящими друг от друга пластинчатыми пружинами. Использование изобретения позволяет упростить систему для перемещения без ухудшения точности установки деталей в заданном положении для обработки. 2 ил.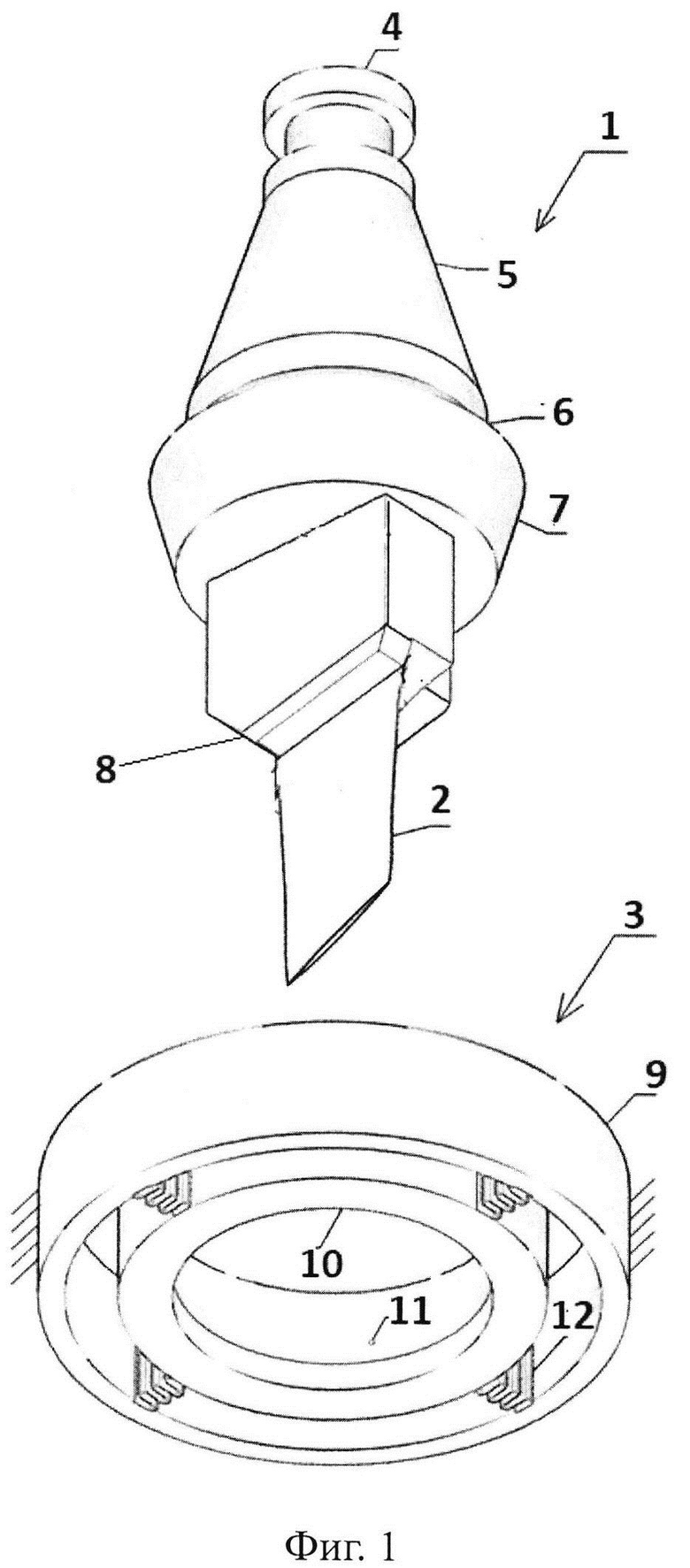
Система для перемещения и базирования обрабатываемых заготовок лопаток газотурбинных двигателей, содержащая приспособление-спутник для захвата обрабатываемых заготовок и устройство для базирования приспособления-спутника в заданном положении, отличающаяся тем, что приспособление-спутник выполнено в форме вала с фиксирующими элементами, выполненными с возможностью их захвата соответствующими механизмами робота-манипулятора, причем часть внешней поверхности вала выполнена конической формы, а на торце вала размещен замок для захвата обрабатываемых заготовок, при этом устройство для базирования приспособления-спутника выполнено в виде коаксиально установленных наружного кольцевого основания и внутренней кольцевой втулки, внутренняя поверхность которой выполнена конической с возможностью сопряжения с упомянутой конической поверхностью вала, причем упомянутые втулка и основание устройства для базирования приспособления-спутника соединены между собой одинаковыми равноотстоящими друг от друга пластинчатыми пружинами, имеющими ряд линейчатых поверхностей, образующие каждой из которых параллельны оси втулки, а смежные линейчатые поверхности соединены между собой синусоидальной в поперечном сечении поверхностью.
| СПОСОБ ФИКСАЦИИ ДЕРЖАТЕЛЕЙ ДЛЯ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ, ПОДЛЕЖАЩИХ МЕХАНИЧЕСКОЙ ОБРАБОТКЕ В ЗОНЕ ОБРАБОТКИ МЕТАЛЛОРЕЖУЩЕГО СТАНКА В ТОЧНО ОПРЕДЕЛЕННОМ И ЗАРАНЕЕ ЗАДАННОМ ПОЛОЖЕНИИ, И ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2481939C2 |
| ЗАЖИМНОЕ УСТРОЙСТВО С ЗАЖИМНЫМ ПАТРОНОМ И РАЗЪЕМНО ФИКСИРУЕМЫМ НА НЕМ ДЕРЖАТЕЛЕМ ЗАГОТОВКИ | 2008 |
|
RU2396159C2 |
| Приспособление - спутник для базирования и закрепления тонкостенной корпусной детали с пазом | 2021 |
|
RU2783244C1 |
| Механическая колосниковая решетка | 1960 |
|
SU143187A1 |
| Устройство для закрепления деталей сложной формы | 1984 |
|
SU1238936A2 |
| US 2003111786 A1, 19.06.2003 | |||
| US 2015115553 A1, 30.04.2015. | |||

