.
i|i --4
Од 4
Изобретение относится к мапгиио- строению и может быть использовано в автоматических линиях спутникового типа для смены, фиксации и зажима спутников на многоцелевых станках,
Цель изобретения - повышение надежности и точности позиционирования спутников.
На чертеже схематично изображено транспортное устройство, план, с частичным разрезом одного из спутников и манипулятора.
Транспортное устройство автоматической линии спутникового типа содержит манипулятор с поворотным корпусом 1, в котором расположены механизмы захвата спутников, выполненные в виде рычажной системы 2 из двух пар звеньев, перемещаемых силовым цилиндром 3, корпус и шток которого установлены в выполненных в корпусе манипулятора направляющих. На свободных концах звеньев рычажной систег-ы 2 размещены захватные элементы 4, а в спутниках 5 выполнены соответствующие пазы 6, Во внутренней полости каждого спутника 5 установлена на осях 7 пара двуплечих рычагов 8 с возможностью взаимодействия одними своими пле чами через штоки: 9 с захватными эле- ментами 4, а другими - с возможностью размеп;ения их конусных участков а в выемках фиксаторов 10, установленны : на столе 11 технологической позиции, Штоки 9 шарнирно связаны с одними из концов рычагов 8, причем эти концы рычагов подпружинены силовыми пружинами 12. Во внутренней полости спутника 5 установлены два неподвижно за- крепленных базовых элемента 13, выполненные в виде призм. Аналогичные элементы размещены во внутренней полости спутника 5, установленного на другом столе 14 технологической по- зиции, например на транспортной тележке, В звеньях рычажной системы 2 параллельно оси силового цилиндра 3 выполнены пазы 15, в которых размещены штифты, закрепленные в корпусе 1 манипулятора. Концы звеньев рычажной системы 2 связаны шарнирами 16 между собой с корпусом и штоком силового . цилиндра 3, Пазы 17 предусмотрены для переустановки рычажной системы 2 под различные типоразмеры спутников.
Устройство работает следующим образом.
Q
5 0 5о о д -
5
Спутник 5 с закрепленной на нем заготовкой устанавливается на столе 14 технологической позиции в позицию загрузки, Корпус 1 манипулятора поднимается, а рычажная система 2 сведена силовым цилиндром 3 таким образом, что захватные элементы 4 перемещаются с минимальным зазором относительно пазов 6 и торцов штоков 9, Как только вертикальное перемещение манипулятора достигнет соответствующего положения, движение прекращается и подается команда на срабатывание силового цилиндра 3, Происходит перемещение звеньев рычажной системы 2 в пределах длины пазов 15, и торцы захватных элементов 4 перемещаются строго в одном направлении - перпендикулярно оси штоков 9, При этом захватные элементы 4 заходят в соответствующие пазы 6 спутников 5, один из которых закреплен на столе 11 технологической позиции (столе станка), а другой - на столе 14 технологической позиции (транспортной тележке). Происходит взаимодействие торцевых захватньк элементов 4 со штоками 9. Силовые прзтжины 12 сжимаются, и конусные участки а рычагов 8 выходят из соответствующих выемок фиксаторов 10, позволяя в дальнейшем осуществить свободный съем или посадку спутников.
После захвата спутников 5 корпус 1. манипулятора вновь поднимается в крайнее положение до выхода фиксаторов 10 из внутренней полости приспособлений, после чего поворачивается на 180° вокруг своей оси. После осуществления поворота манипулятор опускает оба спутника в среднее положение. При этом приспособления меняются местами и своими базовыми элементами 13 охватывают фиксаторы 10, Силовой цилиндр 3 срабатывает, и рычажная система механизма захвата 2 сводится таким образом, что захватные элементы 4 выходят из соответствующих пазов 6 спутников. Взаимодействие рычагов 8 со штоками 9 прекраща- ется и последние под действием пружин 12 поворачиваются относительно неподвижных осей 7 до контакта конусных участков а с соответствующими выемками фиксаторов 10, осуществляя таким образом надежное закрепление спутников 5 на столах технологических позиций, В дальнейшем манипулятор опускается в исходное крайнее нижнее положение. Со стола 11 технологической позиции приспособление с заготовкой перемещается в зону обработки а с технологической позиции спутник с обработанной деталью поступает в зону разгрузки или на .следующую рабочую позицию ав1рматической линии. Формула изобретения
Транспортное устройство автоматической линии спутникового типа, содержащее манипулятор с поворотным корпусом и приводом его перемещения вдоль оси поворота, расположенные на его корпусе механизмы захватов спут- {ников с захватными элементами и си- ловьм цилиндром их перемещения, а также стол технологической позиции с фиксаторами для спутников, отличающееся тем, что, с целью повышения надежности и точности позиционирования спутников, каждый спутник снабжен парой двуплечих рычагов, на одном плече каждого из которых вьгполнеьгы конусные участки, а в фиксаторах - соответствующие выемки под эти участки, причем механизмы захватов спутников выполнены в виде рычажной системы из двух пар звеньев с пазами и штифтами, закрепленными в корпусе манипулятора и размещенными в пазах каждой пары звеньев,
при этом корпус силового цилиндра и его щток установлены в выполненных в корпусе манипулятора направляющих, а одни концы звеньев каждой пары связаны щарнирами между собой и с корпусом силового цилиндра, при этом другие концы звеньев каждой пары свя заны между собой и со штоком цилиндра, причем на свободных концах звеньев размещены захватные элементы, а
двуплечие рычаги размещены с возможностью взаимодействия одними своими плечами с захватными элементами, а другими - с возможностью размещения и их конусных участков в выемках фик- .
саторов.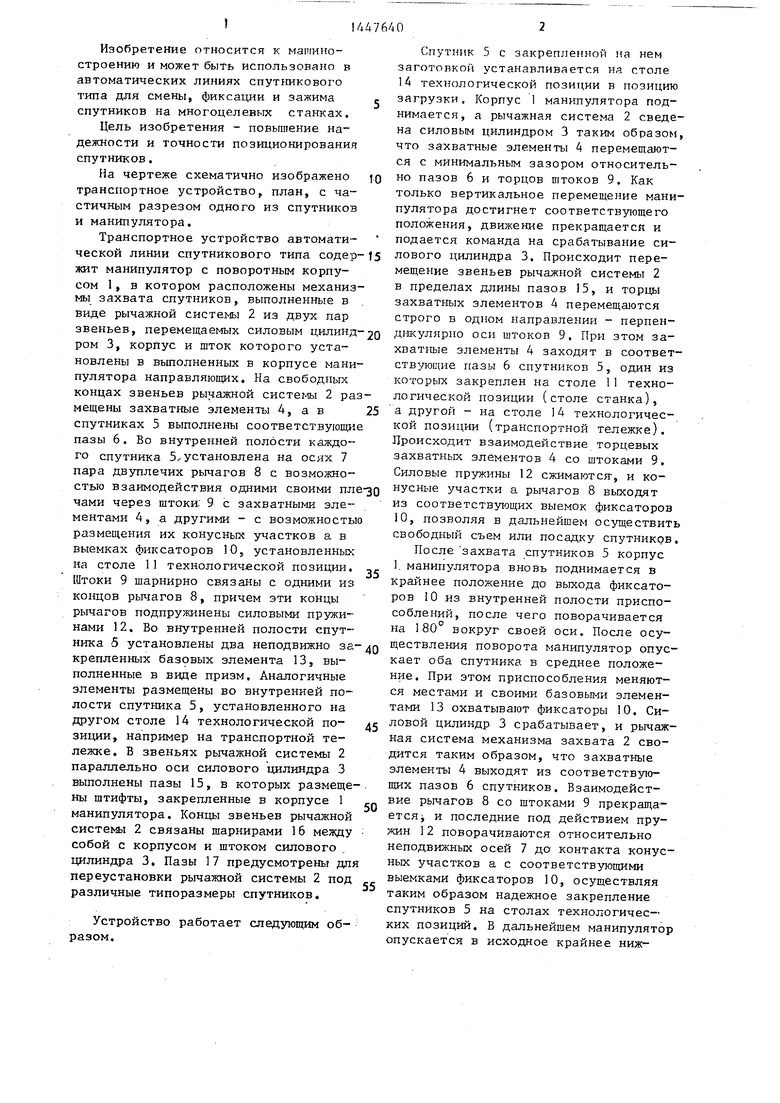
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1007967A1 |
| Способ отделения верхнего листа от стопы и подачи его в зону обработки и устройство для его осуществления | 1986 |
|
SU1375388A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ДЛЯ СБОРКИ И СВАРКИ КУЗОВОВ АВТОМОБИЛЕЙ | 1995 |
|
RU2102210C1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для смены,фиксации и зажима приспособлений-спутников | 1980 |
|
SU867604A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| Устройство для автоматической смены спутников на металлорежущем станке | 1986 |
|
SU1400851A1 |
| Захват манипулятора | 1986 |
|
SU1414631A1 |
Изобретение относится к. машиностроению и может быть использовано в автоматических линиях спутникового типа для смены, фиксации и зажима спутников на многоцелевых станках. Цель изобретения - повышение надежности и точности позиционирования спутников. Это достигается тем, что в устройстве, содержащем манипулятор с поворотным корпусом 1, механизм захвата спутника выполнен в виде рычажной системы 2 с приводом в виде силового цилиндра 3,, размещенной на каждой из двух противоположных сторон манипулятора, и снабжен захватными элементами 4. Фиксаторы 10 с конусными гнездами, расположенные на столе 11 технологической позиции и взаимодействующие с базовыми элементами 13 спутника 5, во внутренней полости последнего установлены на осях 7, жестко связанных с корпусом спутника. Два подпружиненных рычага 8 установлены с возможностью их размещения одними концами посредством конусных участков а в соответствующих конусных выемках фиксаторов 10, а другими взаимодействуют с захватными элементами 4 рычажной системы 2 механизма захвата. Спутник 5 имеет один замковый элемент - паз 6, а механизм захвата - соответствуюихий элемент 4 - выступ, ширина которого регулируется в зависимости от соответствующего размера паза 6. 1 ил. с (Л
| Устройство для смены,фиксации и зажима приспособлений-спутников | 1980 |
|
SU867604A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
