Изобретение относится к области применения беспилотных летательных аппаратов и может быть использовано в системах специального назначения.
Наиболее близким по технической сущности и достигаемому результату (прототип) является способ функционирования комплекса наблюдения на беспилотном летательном аппарате (БЛА), например, [Моисеев B.C. Беспилотные вертолеты. Современное состояние и перспективы развития. Казань: Редакционно-издательский центр «Школа», 2019, 596 с., стр. 338-340], основанный на определении координат местоположения района наблюдения подстилающей поверхности средством наблюдения на беспилотном летательном аппарате (СНБЛА) и относительно их значений параметров траектории его полета, осуществлении пунктом управления (ПУ) СНБЛА запуска СНБЛА и наблюдении боровым средством наблюдения участков подстилающей поверхности путем полета по заданной траектории, передаче СНБЛА потока кадров изображений участков подстилающей поверхности через ПУ СНБЛА потребителю, обработке потребителем потока кадров изображений участков подстилающей поверхности и обнаружении изображения объекта длительного наблюдения на кадрах изображений участков подстилающей поверхности.
Недостатком способа является необходимость при обнаружении объекта, требующего длительного наблюдения, выделять время из полетного времени СНБЛА для его наблюдения (периодически и постоянно) путем зависания или барражирования над объектом. Это приводит к увеличению времени выполнения полетного задания по наблюдению для всего района или сокращению его размеров, что в динамично меняющееся обстановке не всегда приемлемо.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности функционирования СНБЛА.
Сущность изобретения заключается в обеспечении длительного наблюдения за объектами за счет использования подвесных СНБЛА, осуществляющих длительное наблюдение за объектами путем отделения от СНБЛА - носителя подвесных СНБЛА.
Технический результат достигается тем, что в известном способе длительного наблюдения объекта беспилотным комплексом наблюдения, основанном на определении координат местоположения района наблюдения подстилающей поверхности СНБЛА и относительно их значений параметров траектории его полета, осуществлении ПУ СНБЛА запуска СНБЛА и наблюдении боровым средством наблюдения участков подстилающей поверхности путем полета по заданной траектории, передаче СНБЛЛ потока кадров изображений участков подстилающей поверхности через ПУ СНБЛА потребителю, обработке потребителем потока кадров изображений участков подстилающей поверхности и обнаружении изображения объекта длительного наблюдения на кадрах изображений участков подстилающей поверхности, предварительно включают в состав оборудования СНБЛА N число подвесных СНБЛА меньшего массо-габаритного класса, которое определяется технической возможностью их размещения на борту СНБЛА - их носителя, дополнительно осуществляют координатную привязку СНБЛА - носителем подвесных СНБЛА каждого кадра изображения к координатам каждого участка подстилающей поверхности и передают их значения в потоке кадров изображений участков подстилающей поверхности через ПУ СНБЛЛ потребителю, с использованием координат кадра с изображением обнаруженного объекта длительного наблюдения потребителем определяют координаты его местоположения на участке подстилающей поверхности и передают их значения на ПУ СНБЛА, назначают на ПУ СНБЛА из N числа m-ое подвесное СНБЛА для наблюдения за объектом длительного наблюдения, где  с использованием координат местоположения обнаруженного объекта длительного наблюдения, на ПУ СНБЛЛ формируют для m-го подвесного СНБЛА параметры траектории полета и барражирования и передают их значения на m-ое подвесное СНБЛА, запускают с борта СНБЛА - носителя подвесных СНБЛА m-ое подвесное СНБЛА, осуществляют полет m-ым подвесным СНБЛА в район барражирования, наблюдают промежуток времени
с использованием координат местоположения обнаруженного объекта длительного наблюдения, на ПУ СНБЛЛ формируют для m-го подвесного СНБЛА параметры траектории полета и барражирования и передают их значения на m-ое подвесное СНБЛА, запускают с борта СНБЛА - носителя подвесных СНБЛА m-ое подвесное СНБЛА, осуществляют полет m-ым подвесным СНБЛА в район барражирования, наблюдают промежуток времени  обнаруженный объект длительного наблюдения путем барражирования m-ым подвесным СНБЛА по соответствующей траектории, где
обнаруженный объект длительного наблюдения путем барражирования m-ым подвесным СНБЛА по соответствующей траектории, где  - предельный промежуток времени возможного барражирования в районе наблюдаемого объекта подвесного СНБЛА, передают поток кадров изображений обнаруженного объекта длительного наблюдения т-м подвесным СНБЛА через ПУ СНБЛА потребителю, в случае обнаружения и определения координат местоположения потребителем последующего объекта длительного наблюдения повторяют процедуры от выбора на ПУ СНБЛА из N - 1 числа подвесных СНБЛА до передачи потока кадров изображений обнаруженного объекта длительного наблюдения подвесным СНБЛА через ПУ СНБЛА потребителю для k-ого подвесного СНБЛА, где
- предельный промежуток времени возможного барражирования в районе наблюдаемого объекта подвесного СНБЛА, передают поток кадров изображений обнаруженного объекта длительного наблюдения т-м подвесным СНБЛА через ПУ СНБЛА потребителю, в случае обнаружения и определения координат местоположения потребителем последующего объекта длительного наблюдения повторяют процедуры от выбора на ПУ СНБЛА из N - 1 числа подвесных СНБЛА до передачи потока кадров изображений обнаруженного объекта длительного наблюдения подвесным СНБЛА через ПУ СНБЛА потребителю для k-ого подвесного СНБЛА, где 
В настоящее время для решения различных задач, в том числе, для наблюдения подстилающей поверхности (в оптическом, и радиодиапазонах длин волн), широко используются БЛА. Комплекс СНБЛА, как правило, включает в себя: БЛА с полезной нагрузкой для наблюдения и наземный ПУ, обеспечивающий запуск, посадку, управление полетом БЛА, получение, обработку и передачу данных, например [Моисеев B.C. Беспилотные вертолеты. Современное состояние и перспективы развития. Казань: Редакциопно-издательский центр «Школа». 2019, 596 с., стр. 331].
Для обеспечения длительного наблюдения за объектом необходимо дополнительно выделять время из полетного времени СНБЛА, что не всегда возможно.
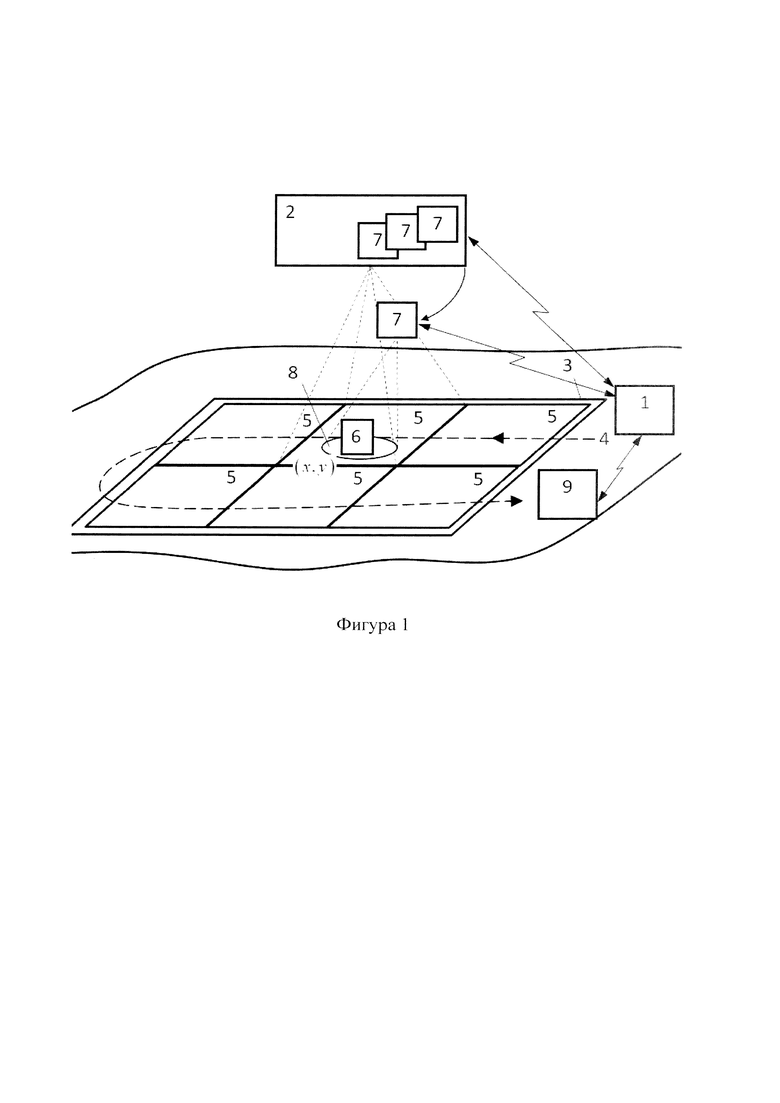
На фиг. 1 представлена схема, поясняющая способ, где приняты следующие обозначения: 1 - ПУ СНБЛА; 2 - СНБЛА - носитель подвесных СНБЛА; 3 - район наблюдения подстилающей поверхности; 4 траектория полета СНБЛА; 5 - участок наблюдения СНБЛА подстилающей поверхности; 6 - объект длительного наблюдения; 7 -подвесной СНБЛА; 8 - сектор наблюдения дополнительным СНБЛА объекта длительного наблюдения; 9 - потребитель потока кадров изображений подстилающей поверхности ((х,у) - координаты местоположения объекта длительного наблюдения).
В соответствии с фиг. 1 ПУ СНБЛА 1 осуществляет определение координат местоположения района выполнения задачи 3 СНБЛА носи гелем подвесных СНБЛА 2 и относительно их значений параметры траектории его полета 4. ПУ СНБЛА 1 запускает СНБЛА 2 и сопровождает его полет по заданной траектории 4. СНБЛЛ 2, несущий на борту N число подвесных СНБЛА 7, осуществляет наблюдение участков района подстилающей поверхности 5 боровым средством наблюдения. Полученные кадры СНБЛЛ 2 координат о привязывает к координатам каждого участка подстилающей поверхности 5 и передает их значения в потоке кадров изображений участков подстилающей поверхности через ПУ СНБЛЛ 1 потребителю 9. Потребитель 9 обрабатывает поток кадров с координат ной информацией изображений участков подстилающей поверхности 5 и при обнаружении изображения объекта длительного наблюдения 6 определяет координаты (х,у) его 6 местоположения.
Значения координат местоположения объекта 6 передает на ПУ СНБЛА 1. ПУ СНБЛА 1 назначает из N числа подвесных СНБЛА 7 один СНБЛА 7, а также формирует и передает на назначенный СНБЛА 7 значения параметров траектории полета и барражирования для длительного наблюдения объекта 6 и запускает его 7 с борга СНБЛА 2. Назначенный СНБЛА 7 осуществляет полет в район барражирования, и по прибытию, наблюдение в секторе 8 объекта 6 с передачей потока кадров изображений через ПУ К БЛА 1 потребителю 9. При этом ведение наблюдения назначенным СНБЛА 7 производится промежуток времени  не превышающий
не превышающий  предельный
предельный  возможного барражирования в районе наблюдаемого объекта 6.
возможного барражирования в районе наблюдаемого объекта 6.
В случае обнаружения и определения координат местоположения потребителем последующею объекта длительною наблюдения ПУ СНБЛА назначает из оставшихся подвесной СНБЛА для его наблюдения.
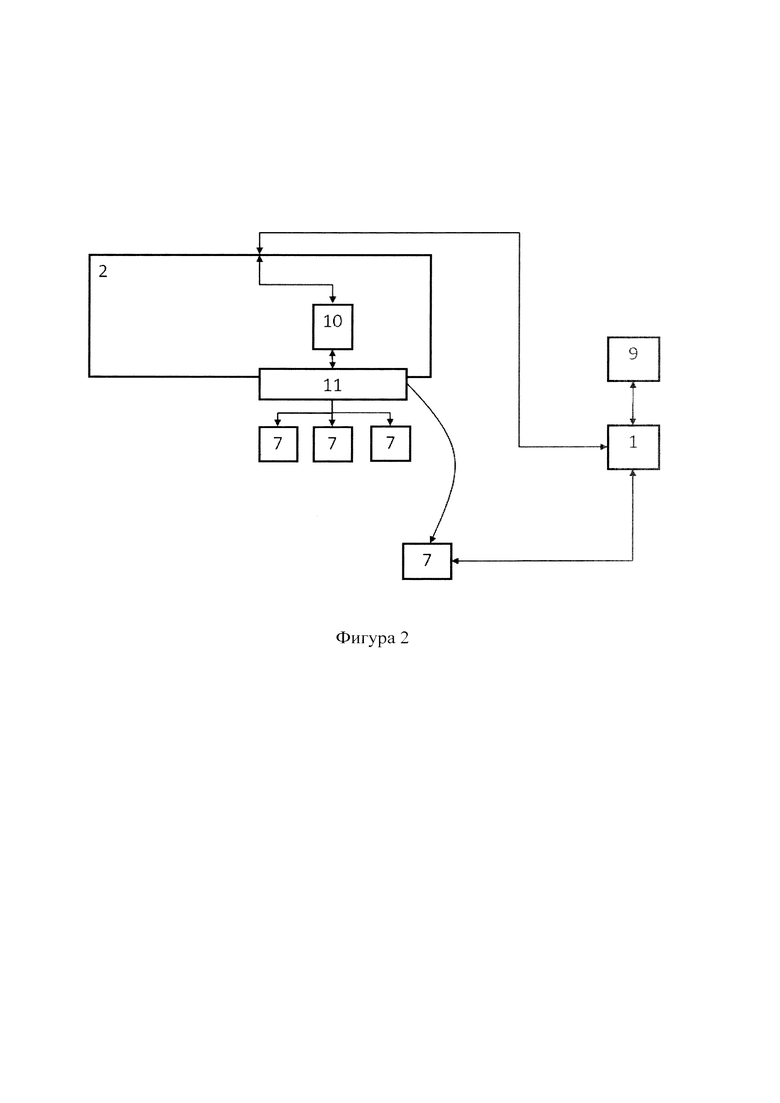
На фиг. 2 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства включает блок управления подвесным устройством 10, подвесное устройство 11 (остальные обозначения соответствуют фиг. 1).
ПУ СНБЛА 1 назначает из N числа подвесных СНБЛА 7 один СНБЛЛ 7. а также формирует и передает на назначенный СНБЛА 7 значения параметров траектории полета и барражирования для длительного наблюдения объекта 6 и запускает ею 7 с борта СНБЛА 2 передачей управляющего сигнала через блок управления подвесным устройством 10 и подвесное устройство 11. Назначенный СНБЛА 7 осуществляет полет в район барражирования, и но прибытию, наблюдение за объектом с передачей потока кадров изображений через ПУ СНБЛА 1 потребителю 9.
Таким образом, у заявляемого способа появляются свойства, заключающиеся в повышении повышение эффективности функционирования СНБЛА за счет использования подвесных СНБЛА, осуществляющих длительное наблюдение за объектами путем отделения от СНБЛА - носителя подвесных СНБЛА. Тем самым, предлагаемый авторами, способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ длительного наблюдения объекта беспилотным комплексом наблюдения, основанный на определении координат местоположения района наблюдения подстилающей поверхности СНБЛА и относительно их значений параметров траектории его полета, осуществлении ПУ СНБЛА запуска СНБЛА и наблюдении боровым средством наблюдения участков подстилающей поверхности путем полета по заданной траектории, передаче СНБЛА потока кадров изображений участков подстилающей поверхности через ПУ СНБЛА потребителю, обработке потребителем потока кадров изображений участков подстилающей поверхности и обнаружении изображения объекта длительного наблюдения на кадрах изображений участков подстилающей поверхности, предварительном включении в состав оборудования СНБЛА N числа подвесных СНБЛЛ меньшего массо-габаритного класса, которое определяется технической возможностью их размещения на борту СНБЛА -их носителя, дополнительном осуществлении координатной привязки СНБЛА - носителем подвесных СНБЛА каждого кадра изображения к координатам каждого участка подстилающей поверхности и передаче их значений в потоке кадров изображений участков подстилающей поверхности через ПУ СНБЛА потребителю, с использованием координат кадра с изображением обнаруженного объекта длительного наблюдения потребителем определении координат его местоположения на участке подстилающей поверхности и передаче их значений на ПУ СНБЛА, назначении на ПУ СНБЛА из N числа т -го подвесною СНБЛА для наблюдения за объектом длительного наблюдения, где  формировании на ПУ СНБЛЛ с использованием координат местоположения обнаруженного объекта длительного наблюдения для m-го подвесного СНБЛА параметров траектории полета и барражирования и передаче их значений на m-ое подвесное СНБЛА, запуске с борта СНБЛА - носителя подвесных СНБЛЛ т -го подвесного СНБЛА, осуществлении полета m-ым подвесным СНБЛА в район барражирования, наблюдении в промежутке времени
формировании на ПУ СНБЛЛ с использованием координат местоположения обнаруженного объекта длительного наблюдения для m-го подвесного СНБЛА параметров траектории полета и барражирования и передаче их значений на m-ое подвесное СНБЛА, запуске с борта СНБЛА - носителя подвесных СНБЛЛ т -го подвесного СНБЛА, осуществлении полета m-ым подвесным СНБЛА в район барражирования, наблюдении в промежутке времени  обнаруженного объекта длительного наблюдения путем барражирования m-ым подвесным СНБЛА по соответствующей траектории, где
обнаруженного объекта длительного наблюдения путем барражирования m-ым подвесным СНБЛА по соответствующей траектории, где  - предельный промежуток времени возможного барражирования в районе наблюдаемого объекта подвесного СНБЛА, передаче потока кадров изображений обнаруженного объекта длительного наблюдения т-м подвесным СНБЛА через ПУ СНБЛА потребителю, в случае обнаружения и определения координат местоположения потребителем последующего объекта длительного наблюдения повторении процедур от выбора на ПУ СНБЛА из N -1 числа подвесных СНБЛА до передачи потока кадров изображений обнаруженного объекта длительного наблюдения подвесным СНБЛА через ПУ СНБЛА потребителю для k-ого подвесного СНБЛА, где
- предельный промежуток времени возможного барражирования в районе наблюдаемого объекта подвесного СНБЛА, передаче потока кадров изображений обнаруженного объекта длительного наблюдения т-м подвесным СНБЛА через ПУ СНБЛА потребителю, в случае обнаружения и определения координат местоположения потребителем последующего объекта длительного наблюдения повторении процедур от выбора на ПУ СНБЛА из N -1 числа подвесных СНБЛА до передачи потока кадров изображений обнаруженного объекта длительного наблюдения подвесным СНБЛА через ПУ СНБЛА потребителю для k-ого подвесного СНБЛА, где 
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ОБЪЕКТОВ УПРАВЛЯЕМЫМИ БОЕПРИПАСАМИ В ЛОКАЛЬНОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 2024 |
|
RU2835023C1 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ПРОСТРАНСТВА В ЗОНАХ РАСПРОСТРАНЕНИЯ ОБЛАКОВ ВУЛКАНИЧЕСКОГО ПЕПЛА | 2015 |
|
RU2650850C2 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА ВОЗДУШНОГО КОМПЛЕКСА ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2022 |
|
RU2792921C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| СПОСОБ НАВЕДЕНИЯ АРТИЛЛЕРИЙСКИХ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ | 2024 |
|
RU2833021C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |
| СПОСОБ АДАПТИВНОГО ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2013 |
|
RU2540001C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
Изобретение относится к области применения беспилотных летательных аппаратов. Сущность способа наблюдения объекта беспилотным комплексом наблюдения заключается в следующем. Определяют координаты местоположения района наблюдения средством наблюдения на беспилотном летательном аппарате (СНБЛА) - носителе подвесных СНБЛА меньшего класса. Через пункт управления (ПУ) запускают СНБЛА и наблюдают бортовым средством наблюдения требуемый район. Передают СНБЛА поток кадров изображений с координатной привязкой каждого кадра к координатам каждого участка района через ПУ потребителю, обрабатывающему поток кадров с целью поиска объекта наблюдения, определяющему координаты объекта и передающему полученные значения на ПУ. Затем ПУ назначает подвесное СНБЛА для наблюдения за обнаруженным объектом, с использованием координат местоположения объекта формирует и передает на подвесное СНБЛА параметры полета. СНБЛА запускает с борта подвесное СНБЛА, осуществляющее полет в район барражирования, дальнейшее наблюдение объекта с учётом предельного времени барражирования и передающее поток кадров изображений обнаруженного объекта через ПУ потребителю. Техническим результатом изобретения является повышение эффективности функционирования СНБЛА. 2 ил.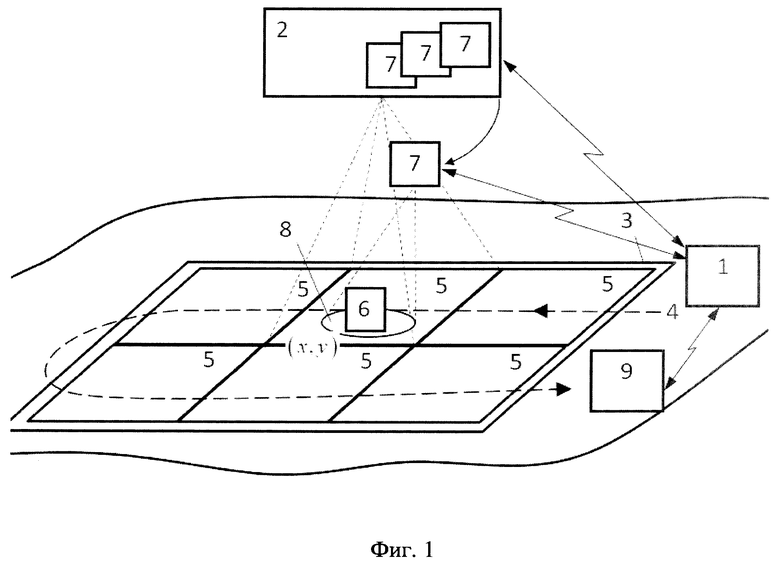
Способ длительного наблюдения беспилотным комплексом наблюдения, основанный на определении координат местоположения района наблюдения подстилающей поверхности средством наблюдения на беспилотном летательном аппарате (БпЛА) и относительно их значений параметров траектории его полета, осуществлении пунктом управления (ПУ) средствами наблюдения на БпЛА запуска средства наблюдения на БпЛА и наблюдении бортовым средством наблюдения участков подстилающей поверхности путем полета по заданной траектории, передаче средством наблюдения на БпЛА потока кадров изображений участков подстилающей поверхности через ПУ средств наблюдения на БпЛА потребителю, обработке потребителем потока кадров изображений участков подстилающей поверхности и обнаружении изображения объекта длительного наблюдения на кадрах изображений участков подстилающей поверхности, отличающийся тем, что предварительно включают в состав оборудования средства наблюдения на БпЛА N число подвесных средств на БпЛА меньшего массо-габаритного класса, которое определяется технической возможностью их размещения на борту средства наблюдения на БпЛА - их носителя, дополнительно осуществляют координатную привязку средством наблюдения на БпЛА - носителем подвесных средств наблюдения на БпЛА каждого кадра изображения к координатам каждого участка подстилающей поверхности и передают их значения в потоке кадров изображений участков подстилающей поверхности через ПУ средств наблюдения БпЛА потребителю, с использованием координат кадра с изображением обнаруженного объекта длительного наблюдения потребителем определяют координаты его местоположения на участке подстилающей поверхности и передают их значения на ПУ средствами наблюдения на БпЛА, назначают на ПУ средствами наблюдения на БпЛА из N числа m-ое подвесное средство наблюдения на БпЛА для наблюдения за объектом длительного наблюдения, где  с использованием координат местоположения обнаруженного объекта длительного наблюдения, на ПУ средствами наблюдения на БпЛА формируют для m-го подвесного средства наблюдения на БпЛА параметры траектории полета и барражирования и передают их значения на m-ое подвесное средство наблюдения на БпЛА, запускают с борта средства наблюдения на БпЛА - носителя подвесных средств наблюдения на БпЛА m-ое подвесное средство наблюдения на БпЛА, осуществляют полет m-ым подвесным средством наблюдения на БпЛА в район барражирования, наблюдают промежуток времени
с использованием координат местоположения обнаруженного объекта длительного наблюдения, на ПУ средствами наблюдения на БпЛА формируют для m-го подвесного средства наблюдения на БпЛА параметры траектории полета и барражирования и передают их значения на m-ое подвесное средство наблюдения на БпЛА, запускают с борта средства наблюдения на БпЛА - носителя подвесных средств наблюдения на БпЛА m-ое подвесное средство наблюдения на БпЛА, осуществляют полет m-ым подвесным средством наблюдения на БпЛА в район барражирования, наблюдают промежуток времени  обнаруженный объект длительного наблюдения путем барражирования m-ым подвесным средством наблюдения на БпЛА по соответствующей траектории, где
обнаруженный объект длительного наблюдения путем барражирования m-ым подвесным средством наблюдения на БпЛА по соответствующей траектории, где  - предельный промежуток времени возможного барражирования в районе наблюдаемого объекта подвесного средства наблюдения на БпЛА, передают поток кадров изображений обнаруженного объекта длительного наблюдения m-ым подвесным средством наблюдения на БпЛА через ПУ средствами наблюдения на БпЛА потребителю, в случае обнаружения и определения координат местоположения потребителем последующего объекта длительного наблюдения повторяют процедуры от выбора на ПУ средствами наблюдения на БпЛА из N - 1 числа подвесных средств наблюдения на БпЛА до передачи потока кадров изображений обнаруженного объекта длительного наблюдения подвесным средством наблюдения на БпЛА через ПУ средствами наблюдения на БпЛА потребителю для k -ого подвесного средства наблюдения на БпЛА, где
- предельный промежуток времени возможного барражирования в районе наблюдаемого объекта подвесного средства наблюдения на БпЛА, передают поток кадров изображений обнаруженного объекта длительного наблюдения m-ым подвесным средством наблюдения на БпЛА через ПУ средствами наблюдения на БпЛА потребителю, в случае обнаружения и определения координат местоположения потребителем последующего объекта длительного наблюдения повторяют процедуры от выбора на ПУ средствами наблюдения на БпЛА из N - 1 числа подвесных средств наблюдения на БпЛА до передачи потока кадров изображений обнаруженного объекта длительного наблюдения подвесным средством наблюдения на БпЛА через ПУ средствами наблюдения на БпЛА потребителю для k -ого подвесного средства наблюдения на БпЛА, где  k ≠ m.
k ≠ m.
| СПОСОБ АДАПТИВНОГО ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2013 |
|
RU2540001C1 |
| КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОГО ПОРАЖЕНИЯ ЦЕЛЕЙ НА ОСНОВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2759534C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2018 |
|
RU2694528C1 |
| Способ определения координат объектов и их распознавания | 2022 |
|
RU2787946C1 |
| WO 2011144497 A1, 24.11.2011. | |||

