Изобретение относится к технике промышленного лесопользования и, в частности, к агрегатам для транспортировки заготовленных древесных ресурсов.
Известен агрегат для транспортировки, содержащий силовой энергоблок, ходовую часть и технологическое оборудование (Патент РФ №147563, опубл. 10.11.2014, A01G 23/08).
Однако этот агрегат для транспортировки использует в качестве ходовой части цельный моногусеничный движитель, который имеет сложную систему управления движением, габаритен и неповоротлив, технически сложен в изготовлении и ненадежен в эксплуатации в труднопроходимых условиях.
Ближайшим аналогом является агрегат для транспортировки, содержащий ходовую часть и технологическое оборудование, включающее грузовые коники, которые шарнирно соединены с ходовой частью, причем шарнирные соединения грузовых коников имеют силовые приводы, управляемые по командам по изменению углов ориентации транспортного средства от гироскопов (Патент US 3450222 А, 17.06.1969 года).
Недостатком данного агрегата является то, что он не имеет моногусеничной ходовой части и также не обеспечивает стабилизацию агрегата при движении, что снижает эффективность транспортировки ресурсов на территории с пересеченным рельефом.
Технической задачей, на решение которой направлено изобретение, является повышение эффективности транспортировки древесных ресурсов за счет применения автоматической стабилизации грузовых коников, выполненных в виде шарнирных соединений с модулями моногусеничной ходовой части агрегата.
Поставленная задача достигается тем, что в агрегате для транспортировки древесных ресурсов, содержащем силовую установку и технологическое оборудование, включающее грузовые коники, согласно изобретения, грузовые коники шарнирно соединены с модулями моногусеничной ходовой части, при этом шарнирные соединения грузовых коников снабжены силовыми приводами и гироскопами для автоматической стабилизации агрегата при движении и сброса ресурсов в месте их складирования.
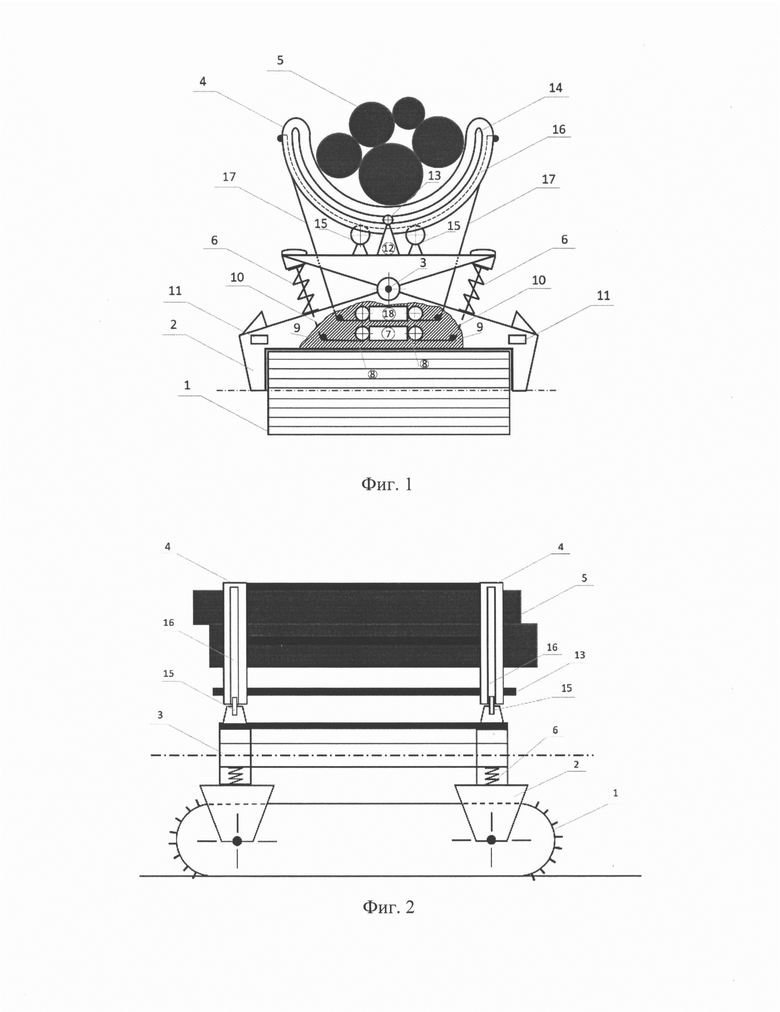
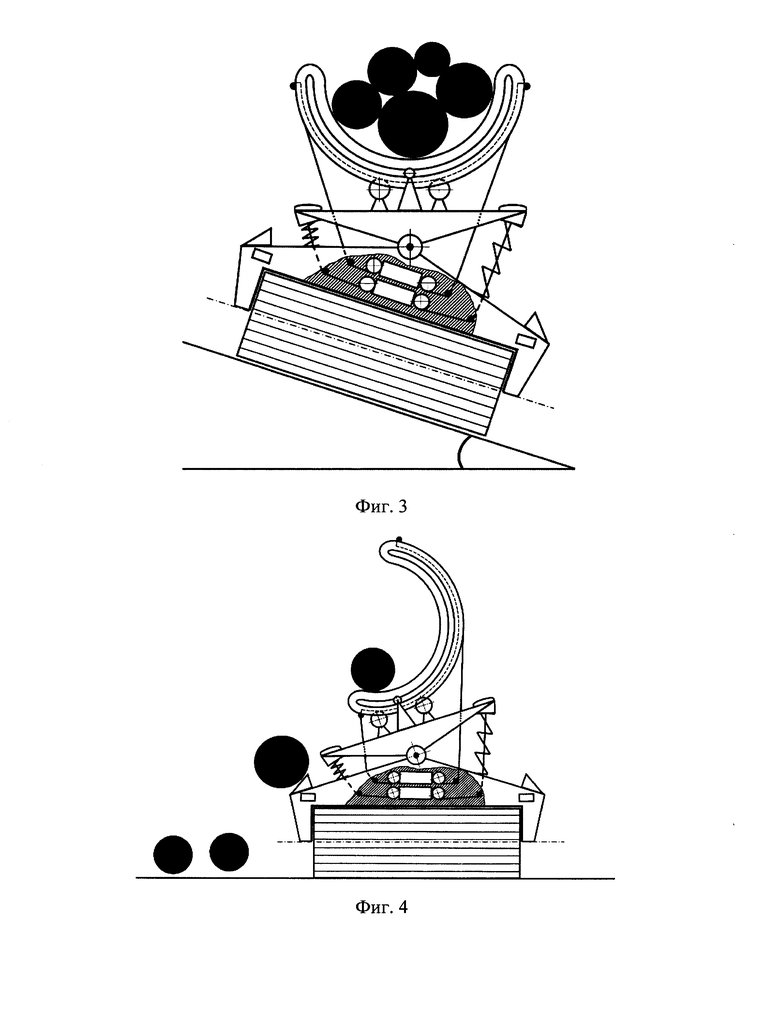
Сущность изобретения поясняется чертежами, где на фиг.1 приведена схема установки грузовых коников и шарнирных соединений с модулями моногусеничной ходовой части вид в профиль; на фиг.2 - приведена схема установки грузовых коников вид фас; на фиг.3 - схема стабилизации шарнирно соединенных грузовых коников с модулями моногусеничной ходовой части, расположенными на склоне; на фиг.4 - схема сброса транспортируемых ресурсов.
Агрегат для транспортировки древесных ресурсов содержит технологическое оборудование, включающее модули моногусеничной ходовой части 1 и корпусом в виде пирамидальной рамы 2, на которой посредством поворотной шаровой опоры 3, расположен подвижный грузовой коник 4, предназначенный для удержания в процессе транспортировки заготовленных ресурсов 5. При этом удержание поворотной шаровой опоры 3 в вертикальной плоскости обеспечивается пружинами 6, а нужное положение подвижного коника 4 при изменении поперечного угла уклона местности а осуществляется за счет двойного сервопривода 7, расположенного внутри корпуса рамы 2, который за счет барабанов 8, шкивов 9 и тяговых канатов 10 и получаемых команд по изменению углов ориентации транспортного средства 1 относительно земной поверхности от механических гироскопов 11, расположенных в правой и левой передней части рамы 2. При чем подвижный грузовой коник 4 крепится к поворотной шаровой опоре с помощью треугольного шарнира 12 и расположенной в его верхней части продольной втулки 13 вставленной в сквозной паз 14 корпуса подвижного грузового коника 4, При этом подвижность грузового коника обеспечивается за счет его скольжения по резиновым колесам вставленных в П-образный паз 16, расположенного на внешней боковой поверхности грузового коника 4. Дополнительное удержание грузового коника 4 в нужном положении в процессе движения беспилотного транспортного средства, обеспечивается тяговыми канатами 17, приводящихся в движение двухбарабанной лебедкой 18.
Агрегат для транспортировки древесных ресурсов работает следующим образом.
В процессе перемещения модули моногусеничной ходовой части 1 гибко копируют рельеф местности, а подвижный грузовой коник 4, посредством шарнирных соединений 3 и силовых приводов 7, 8 при помощи гироскопов 11 автоматически стабилизируют агрегат при движении, перемещая центр тяжести каждого модуля, что обеспечивает всей конструкции большую устойчивость. Управление стабилизацией грузовых коников 4 производят известным способом при помощи гироскопов 11, а стабилизация всего агрегата складывается из стабилизации каждого модуля с грузовым коником в поперечном движению направлениям. Сброс транспортируемых заготовленных ресурсов обеспечивают путем последовательного опрокидывания грузовых коников 4, посредством намотки и размотки канатов 17, в зависимости от стороны выгрузки (справа или слева), с помощью двухбарабанной лебедки 18. В дополнение, аналогично канатам 17 и выбранной стороне выгрузки, одновременно производят намотку и смотку канатов 10 с помощью барабанов 8 и сервопривода 7, с одновременным сжатием и растягиванием соответствующей пружины 6, что позволяет поворотной шаровой опоре также выполнить наклон в нужную сторону.
Количество модулей моногусеничных движителей, размеры грузовых коников и углы их поворотов определяются отдельно для каждого типа условий рельефа местности.
При движении по пересеченной местности транспортное средство может опрокинуться под действием силы тяжести перевозимого ресурса. Применения модульной моногусеничной ходовой части агрегата движущегося по извилистой траектории, имеющего низкий центр тяжести и равномерно прилегающего к грунту совокупно повышают устойчивость агрегата, а автоматическое управление грузовыми кониками (через силовой привод шарнирных соединений) обеспечивает стабилизацию агрегата при движении в реальных условиях пересеченной местности.
В отличие от аналогов предлагаемая конструкция подвижных грузовых коников и ходовой части агрегата для транспортировки ресурсов обеспечивает повышение эффективности транспортировки древесных ресурсов за счет динамической устойчивости при движении и устойчивости агрегата в процессе сброса заготовленных ресурсов.
Двойное назначение грузовых коников агрегата для транспортировки древесных ресурсов позволяет снизить металлоемкость агрегата и энергоемкость процесса в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для лесопользования | 2021 |
|
RU2761884C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| САМОСВАЛЬНАЯ РАЗГРУЗКА ВОЗА СОРТИМЕНТОВ | 2020 |
|
RU2752425C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ МОБИЛЬНОГО СРЕДСТВА И ПОДВЕСКА ДВИЖИТЕЛЯ | 1992 |
|
RU2090028C1 |
| Омниколесная роботизированная грузовая тележка | 2020 |
|
RU2736553C1 |
Изобретение относится к технике промышленного лесопользования и, в частности, к агрегатам для транспортировки заготовленных древесных ресурсов. Агрегат для транспортировки древесных ресурсов содержит раму с ходовой частью и технологическое оборудование, включающее грузовые коники, шарнирно соединенные с ходовой частью. При этом шарнирные соединения грузовых коников снабжены силовыми приводами и гироскопами для автоматической стабилизации агрегата при движении и сброса ресурсов в месте их складирования. Ходовая часть выполнена в виде модулей моногусеничных движителей, а коники выполнены в виде корпуса со сквозным пазом для продольной втулки треугольного шарнира, посредством которого коники крепятся к поворотным шарнирным опорам (шарнирные соединения) пирамидального корпуса рамы модулей моногусеничных движителей, и с П-образным пазом на внешней боковой поверхности корпуса коников для резиновых колец, установленных для скольжения коников. Использование изобретения позволит повысить эффективность транспортировки древесных ресурсов в промышленном лесопользовании. 4 ил.
Агрегат для транспортировки древесных ресурсов, содержащий раму с ходовой частью и технологическое оборудование, включающее грузовые коники, шарнирно соединенные с ходовой частью, при этом шарнирные соединения грузовых коников снабжены силовыми приводами и гироскопами для автоматической стабилизации агрегата при движении и сброса ресурсов в месте их складирования, отличающийся тем, что ходовая часть выполнена в виде модулей моногусеничных движителей, а коники выполнены в виде корпуса со сквозным пазом для продольной втулки треугольного шарнира, посредством которого коники крепятся к поворотным шарнирным опорам (шарнирные соединения) пирамидального корпуса рамы модулей моногусеничных движителей, и с П-образным пазом на внешней боковой поверхности корпуса коников для резиновых колец, установленных для скольжения коников.
| Штамп | 1961 |
|
SU147563A1 |
| Машина для лесопользования | 2021 |
|
RU2761884C1 |
| БЕСЧОКЕРНАЯ ТРЕЛЕВОЧНАЯ МАШИНА | 1991 |
|
RU2016790C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 2013 |
|
RU2539201C2 |
| Супермаховик | 1986 |
|
SU1580100A1 |

