Изобретение относится к области авиации, в частности к способам взлета винтокрылых летательных аппаратов.
Винтокрылый летательный аппарат, оснащённый авторотирующим несущим винтом, работающий по принципу создания подъемной силы на малых скоростях полета относится к типу «автожир (гироплан)», и занимает по своим лётным качествам промежуточное положение между аппаратами самолётного типа, с горизонтальным взлётом и вертолётного типа, с вертикальным взлётом, имея непродолжительный разбег перед выполнением взлёта. Для данных типов летательных аппаратов существуют способы обеспечения взлёта с минимизацией длины разбега или практически полным его отсутствием.
Известен способ выполнения взлёта автожира, включающий стартовую раскрутку несущего винта от работающей силовой установки на минимальном угле общего шага до оборотов, превышающих полётные, отключение несущего винта от силовой установки, увеличение тяги силовой установки до максимальной, увеличение общего шага лопастей несущего винта и выполнение отрыва, отличающийся тем, что после отключения несущего винта от силовой установки и увеличения тяги осуществляют разбег при минимальном угле общего шага, несущий винт при этом располагают нейтрально или под отрицательным углом атаки к потоку, по достижении скорости отрыва общий шаг несущего винта увеличивают до полётного значения или значения, превышающего полётное на безопасную величину, и выполняют отрыв (RU2327603C1, 2008 г.).
Недостаток данного способа заключается в наличии достаточно протяжённого участка пробега по земле, повышенной нагрузке на механические части системы предварительной раскрутки от силовой установки и саму силовую установку вызывающие, как следствие, их ускоренный износ и уменьшение рабочего ресурса, а также усложнение конструкции за счёт необходимости обеспечения летательного аппарата системой соединения и разъединения привода несущего винта, передающего вращение от силовой установки.
Известен также способ взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом и крылом, заключающийся в раскрутке несущего винта на минимальном общем шаге до заданной частоты вращения на старте, отличающийся тем, что осуществляют вертикальный подъем аппарата до отрыва колес шасси от поверхности площадки увеличением общего шага и тяги несущего винта, после этого его разгон переводом во взлетное положение рычагов управления двигателями до достижения заданных значений скорости и высоты на взлете (RU2514012C1, 2014 г.).
Данный способ взлета, являющийся наиболее близким техническим решением, выбранным в качестве прототипа, также имеет ряд недостатков. В частности, имеет место менее быстрый и более энергоёмкий процесс взлёта, поскольку необходимую частоту вращения авторотирующего несущего винта для создания им требуемой величины подъемной силы обеспечивают за счет накопленного запаса кинетической энергии при его раскрутке на старте, а также за счет возрастающей энергии набегающего потока воздуха в процессе взлета. Кроме того, способ является менее безопасным, поскольку отсутствуют автоматические средства контроля, обеспечивающие своевременное изменение режимов работы силовой установки и органов, создающих подъёмную силу летательного аппарата, в зависимости от достижения значений частоты вращения и подъёмной силы, приемлемых на разных этапах взлёта.
Технической задачей заявленного изобретения является осуществление способа взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом таким образом, при котором отсутствуют сложные по технике пилотирования этапы, контроль взлёта выполняется в автоматическом режиме с минимизацией времени взлёта, а также отсутствует чрезмерная нагрузка на системы летательного аппарата.
Технический результат способа взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом достигается тем, что летательный аппарат размещается на подвижной мобильной платформе, позволяющей установить аппарат под любым углом относительно создаваемого на местности ветрового потока воздуха, оснащается системой тросовых ограничителей с динамометрическими датчиками, контролирующими возникновение и возрастание подъёмной силы (тяги), системой раскрутки авторотирующего несущего винта от искусственно создаваемых набегающих потоков воздуха, выполненной в виде осевого вентилятора, установленного под углом к плоскости вращения несущего винта, а также системой контроля высоты отрыва от площадки летательного аппарата, реализованной в форме оптического элемента, улавливающего отклик от ответной части, размещённой непосредственно на корпусе летательного аппарата.
Изобретение поясняется чертежами.
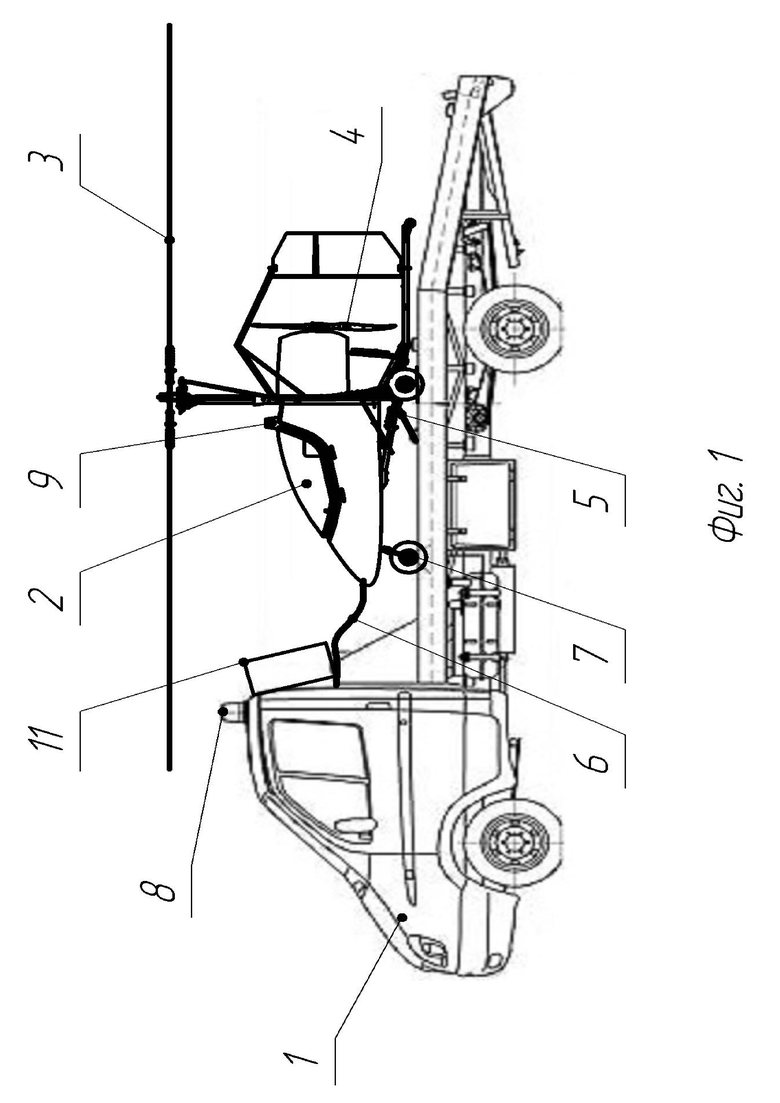
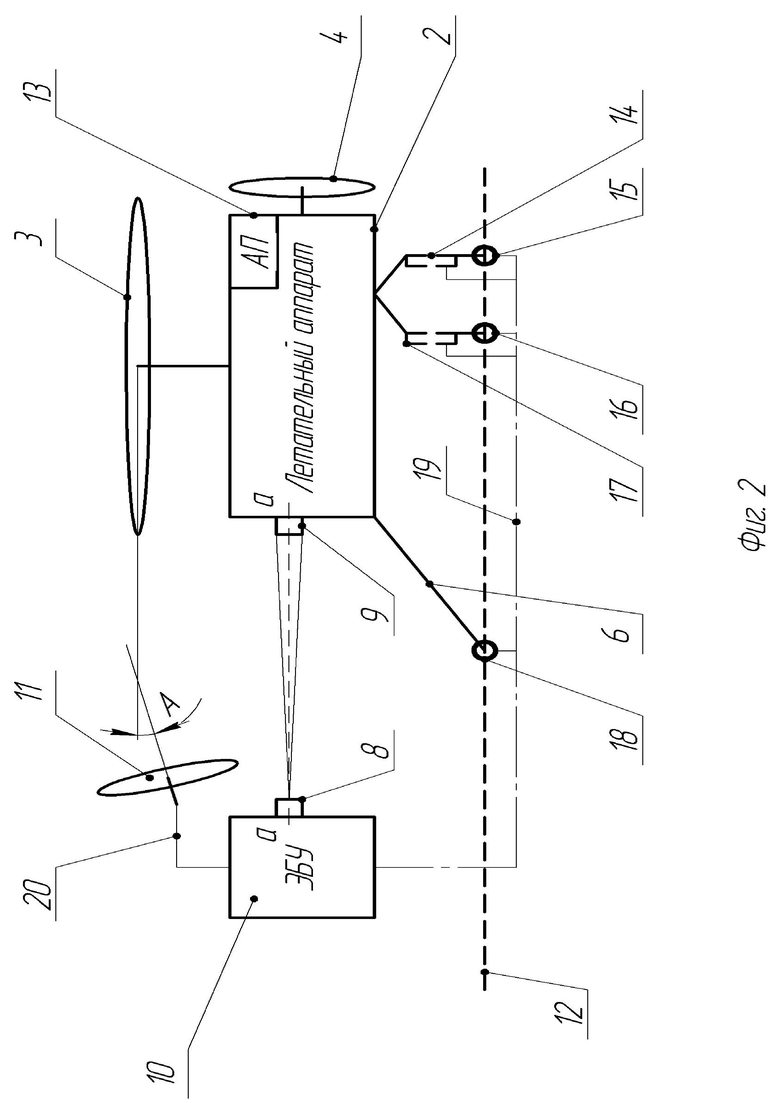
На фиг. 1 изображена подвижная платформа с установленным на ней летательным аппаратом винтокрылого типа с авторотирующим несущим винтом, вид сборку; на фиг. 2 изображена принципиальная схема органов автоматического управления взлётом летательного аппарата винтокрылого типа с авторотирующим несущим винтом.
Способ взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом состоит в следующем.
Подвижная мобильная платформа 1 с размещённым на ней винтокрылым летательным аппаратом 2 с авторотирующим несущим винтом устанавливается в месте взлёта, при этом её положение определяется по наиболее благоприятному направлению взлёта летательного аппарата относительно превалирующего на местности ветрового потока. Летательный аппарат 2 закрепляется системой тросовых ограничителей 5 и 6 с динамометрическими датчиками 14 и 17, контролирующими возникновение и возрастание подъёмной силы (тяги). Предварительная раскрутка маршевого авторотирующего винта производится под действием набегающей воздушной струи, создаваемой системой раскрутки авторотирующего несущего винта 11 от искусственно создаваемых потоков воздуха, выполненной в виде осевого вентилятора, установленного под углом А к плоскости вращения несущего винта. С увеличением оборотов несущего винта начинает нарастать подъёмная сила и переднее колесо 7 летательного аппарата начинает отрываться от поверхности 12 платформы 1. При этом, динамометрические датчики 14 и 17 фиксируют натяжение тросового ограничителя 6. По достижении определённого значения подъёмной силы происходит совмещение на оси а-а оптического элемента 8, установленного на платформе 1 и улавливающей части 9, установленной на летательном аппарате 2, благодаря чему электронный блок управления 10 по сигналу, поступившему от оптического элемента 8, определяет точку достижения летательным аппаратом оптимальной высоты отрыва, подаёт сигнал через групповую линию связи 19 для отключения держателей 15, 16, 18 тросовых ограничителей. Включается в работу маршевый винт 4, летательный аппарат набирает высоту и осуществляет взлёт. В процессе подъёма информация о силе натяжения тросовых ограничителей 5 и 6 передаётся в электронный блок управления 10, который используя линию двухсторонней связи 20 регулирует интенсивность работы системы раскрутки авторотирующего несущего винта 11. В процессе взлёта электронный блок управления 10 по беспроводному радиоканалу связи (не показано) обменивается информацией с блоком автоматического пилотирования 13, контролирующим частоту вращения маршевого винта 4 от силовой установки (не показано) летательного аппарата.
Таким образом, в процессе разгона обеспечивается достижение максимальной тяги движителей и одновременно максимальной тяги несущего винта за счет наиболее полного использования экранного эффекта земли на малой высоте поступательного движения аппарата, а также выполняется взлет без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом без использования сложных по технике пилотирования этапов, выполняется контроль взлёта в автоматическом режиме с минимизацией времени взлёта и без чрезмерной нагрузки на системы летательного аппарата.
Необходимую частоту вращения авторотирующего несущего винта для создания им требуемой величины подъемной силы обеспечивают преимущественно за счет возрастающей энергии набегающего потока воздуха, искусственно создаваемого системой раскрутки авторотирующего несущего винта, выполненной в виде осевого вентилятора, установленного под углом к плоскости вращения несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОПЛАН - СКОРОСТНОЙ ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2573698C2 |
| СПОСОБ ВЗЛЕТА БЕЗ РАЗБЕГА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АВТОРОТИРУЮЩИМ НЕСУЩИМ ВИНТОМ И КРЫЛОМ | 2013 |
|
RU2514012C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2022 |
|
RU2797468C1 |
| Самолёт вертикального взлёта и посадки | 2016 |
|
RU2641952C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2838699C1 |
| КОНВЕРТОПЛАН КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2790460C1 |
| Летательный аппарат вертикального взлёта и посадки с изменяемым направлением тяги движителей | 2019 |
|
RU2790454C2 |
| Летательный аппарат | 2021 |
|
RU2770513C2 |
| Модульный летательный аппарат и способ его вертикального взлёта | 2021 |
|
RU2777132C1 |
Изобретение относится к области авиации, в частности к способам взлета винтокрылых летательных аппаратов. Способ взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом заключается в том, что летательный аппарат размещается на подвижной мобильной платформе, позволяющей установить аппарат под любым углом ветрового потока воздуха. Платформу оснащают системой тросовых ограничителей с динамометрическими датчиками, контролирующих возникновение и возрастание подъёмной силы (тяги). Система раскрутки авторотирующего несущего винта от искусственно создаваемых потоков воздуха выполнена в виде осевого вентилятора, установленного под углом к плоскости вращения несущего винта. Систему контроля высоты отрыва от площадки летательного аппарата реализовывают в форме оптического элемента, улавливающего отклик от ответной части, размещённой непосредственно на корпусе летательного аппарата. Достигается осуществление возможности взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом при отсутствии чрезмерной нагрузки на системы летательного аппарата. 1 з.п. ф-лы, 2 ил.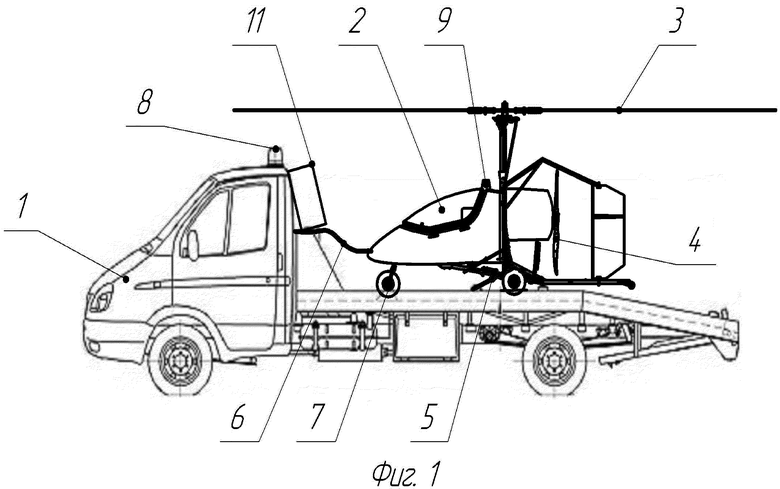
1. Способ взлета без разбега винтокрылого летательного аппарата с авторотирующим несущим винтом, отличающийся тем, что летательный аппарат размещается на подвижной мобильной платформе, позволяющей установить аппарат под любым углом относительно создаваемого на местности ветрового потока воздуха, которая оснащается системой тросовых ограничителей с динамометрическими датчиками, контролирующими возникновение и возрастание подъёмной силы (тяги), системой раскрутки авторотирующего несущего винта от искусственно создаваемых потоков воздуха, выполненной в виде осевого вентилятора, установленного под углом к плоскости вращения несущего винта, а также системой контроля высоты отрыва от площадки летательного аппарата, реализованной в форме оптического элемента, улавливающего отклик от ответной части, размещённой непосредственно на корпусе летательного аппарата.
2. Способ по п. 1, отличающийся тем, что система раскрутки авторотирующего несущего винта от искусственно создаваемых потоков воздуха выполняется в виде нескольких осевых вентиляторов, устанавливаемых под углом к плоскости вращения несущего винта.
| Автожир | 2018 |
|
RU2673933C1 |
| Автожир авиалесоохраны | 2020 |
|
RU2728950C1 |
| US 8998127 B2, 07.04.2015 | |||
| US 10427780 B2, 01.10.2019 | |||
| Барабан для очистки изделий (галтовочный, оболточный барабан) | 1957 |
|
SU112152A2 |

