1. Область техники
Настоящее изобретение относится к способу и устройству для управления рисками для роботов для сноса сооружений, а также относится к области машиностроения.
2. Уровень техники
С развитием промышленной автоматизации и роботизированных технологий быстро растет использование безоператорных трехруких роботов для сноса сооружений в условиях сложных окружающих сред, в частности, в ситуациях, требующих высокоточного позиционирования, минимального потребления энергии, эффективности при выполнении многозадачных операций и уклонения от препятствий. В процессе работы благодаря своим опорным ногам трехрукий робот для сноса сооружений редко подвергается риску опрокидывания. Однако он может столкнуться с рисками опрокидывания и рисками траектории перемещения в условиях сложных окружающих сред (например, при столкновении с препятствиями или падении в ямы).
Суть изобретения
В настоящем изобретении предложены способ и устройство для управления рисками для роботов для сноса сооружений, решающие проблемы, раскрытые в разделе уровня техники.
В соответствии с одним аспектом настоящего изобретения предложен способ управления рисками для роботов для сноса сооружений, включающий первый способ, реализуемый в режиме реального времени во время процесса перемещения робота для сноса сооружений, причем первый способ включает:
определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
в соответствии с параметрами положения, информацией о положении и информацией об окружающей среде робота для сноса сооружений, использование обученной нейронной сети для определения категорий риска, связанных с роботом для сноса сооружений;
в ответ на категорию риска, представляющую собой исключительно риски траектории перемещения, повторное планирование траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений; и управление роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения;
в ответ на категорию риска, представляющую собой исключительно риски опрокидывания, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания; и
в ответ на категории риска, содержащие риски опрокидывания и риски пути перемещения, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания, повторное планирование траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений после устранения рисков опрокидывания и управление роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
В некоторых вариантах осуществления настоящего изобретения способ управления рисками для роботов для сноса сооружений также включает второй способ, реализуемый в режиме реального времени в процессе работы робота для сноса сооружений, причем второй способ включает:
определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
определение, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений и линией опрокидывания; и
в ответ на наличие рисков опрокидывания определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
В некоторых вариантах осуществления настоящего изобретения определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания включает:
в соответствии с углами опрокидывания на линиях опрокидывания, содержащихся в информации о положении, вычисление вероятности того, что каждый угол опрокидывания превысит соответствующее пороговое значение угла; и
в соответствии с линией опрокидывания, соответствующей максимальной вероятности, определение направления опрокидывания робота для сноса сооружений.
В некоторых вариантах осуществления настоящего изобретения способ управления рисками для роботов для сноса сооружений также включает третий способ реализации аварийной остановки в процессе работы или во время процесса перемещения робота для сноса сооружений, причем третий способ включает:
определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
определение, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений во время аварийной остановки и линией опрокидывания; и
в ответ на наличие рисков опрокидывания определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений во время аварийной остановки; а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
В некоторых вариантах осуществления настоящего изобретения определение, имеет ли робот для сноса сооружений риски опрокидывания, включает:
вычисление коэффициента устойчивости робота для сноса сооружений в соответствии с длиной плеча силы, проходящей между центром масс компонентов робота для сноса сооружений, содержащимся в информации о положении, и соответствующей линией опрокидывания, причем коэффициент устойчивости робота для сноса сооружений представляет собой отношение стабилизирующего момента робота для сноса сооружений к опрокидывающему моменту, а соответствующая линия опрокидывания представляет собой линию опрокидывания, соответствующую положению робота для сноса сооружений; и
в ответ на то, что коэффициент устойчивости робота для сноса сооружений будет меньше порогового значения устойчивости, определение, что робот для сноса сооружений имеет риски опрокидывания.
В некоторых вариантах осуществления настоящего изобретения формула для вычисления коэффициента устойчивости робота для сноса сооружений представляет собой:
K=M1/M0;
M1=G7×L7+ G6×L6+ G5×L5+ G3×L3+ G2×L2+ G1×L1;
M0=G4×L4;
где K представляет собой коэффициент устойчивости робота для сноса сооружений, M1 представляет собой стабилизирующий момент робота для сноса сооружений, M0 представляет собой опрокидывающий момент робота для сноса сооружений, G7-G1 представляют собой гравитационные силы кабины, механической руки, гидравлической системы, электрической системы, силовой системы, поворотной платформы и гусеничного шасси робота для сноса сооружений, соответственно, а L7-L1 представляют собой расстояние между центром масс кабины и соответствующей линией опрокидывания, расстояние между центром масс механической руки и соответствующей линией опрокидывания, расстояние между центром масс гидравлической системы и соответствующей линией опрокидывания, расстояние между центром масс электрической системы и соответствующей линией опрокидывания, расстояние между центром масс силовой системы и соответствующей линией опрокидывания, расстояние между центром масс поворотной платформы и соответствующей линией опрокидывания, расстояние между центром масс гусеничного шасси и соответствующей линией опрокидывания, соответственно.
В некоторых вариантах осуществления настоящего изобретения определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений включает:
вычисление разностей передней и задней высот гусениц, расположенных на двух сторонах, в одинаковый момент времени, содержащихся в информации о положении;
в ответ на то, что разность передней и задней высот гусениц, расположенных на двух сторонах, составляет больше 0 и больше первого порогового значения разности высот, определение того, что робот для сноса сооружений находится в положении на подъеме, причем указанные разности передней и задней высот гусениц, расположенных на двух сторонах, представляют собой параметры для положения на подъеме;
в ответ на то, что разность передней и задней высот гусениц, расположенных на двух сторонах, составляет меньше 0 и меньше отрицательной величины первого порогового значения разности высот, определение того, что робот для сноса сооружений находится в положении под уклон, причем указанные разности передней и задней высот гусениц, расположенных на двух сторонах, представляют собой параметры для положения под уклон;
вычисление разности высот между левой гусеницей и правой гусеницей в одинаковый момент времени, содержащихся в информации о положении;
в ответ на то, что разность высот между левой гусеницей и правой гусеницей превышает второе пороговое значение разности высот, определение того, что робот для сноса сооружений находится в наклонном положении, причем указанная разность высот между левой гусеницей и правой гусеницей представляет собой параметр наклонного положения; и
в ответ на то, что разности передней и задней высот гусениц, расположенных на двух сторонах, находятся в диапазоне между первым пороговым значением и отрицательной величиной первого порогового значения, а разность высот между левой гусеницей и правой гусеницей не превышает второго порогового значения разности высот, определение того, что робот для сноса сооружений находится в горизонтальном положении, причем параметр горизонтального положения равен 0.
В соответствии с другим аспектом настоящего изобретения предложено устройство для управления рисками для роботов для сноса сооружений, содержащее первое устройство, выполненное с возможностью работы в режиме реального времени во время процесса перемещения робота для сноса сооружений, причем первое устройство содержит:
модуль условий работы, выполненный с возможностью определения положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
модуль категорий риска, выполненный с возможностью использования обученной нейронной сети для определения категорий риска, связанных с роботом для сноса сооружений, в соответствии с параметрами положения, информацией о положении и информацией об окружающей среде робота для сноса сооружений;
модуль планирования траектории, выполненный с возможностью, в ответ на категорию риска, представляющую собой исключительно риски траектории перемещения, повторного планирования траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений и управления роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения;
модуль управления устойчивостью, выполненный с возможностью, в ответ на категорию риска, представляющую собой исключительно риски опрокидывания, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировки положения робота для сноса сооружений в соответствии с направлением опрокидывания; и
модуль последовательного управления, выполненный с возможностью, ответ на категории риска, содержащие риски опрокидывания и риски пути перемещения, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, регулировки положения робота для сноса сооружений в соответствии с направлением опрокидывания, повторного планирования траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений после устранения рисков опрокидывания и управления роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
В соответствии с другим аспектом настоящего изобретения предложен машиночитаемый носитель информации, причем машиночитаемый носитель информации выполнен с возможностью хранения одной или более программ, а указанная одна или более программ содержат инструкции, которые при исполнении вычислительным устройством вызывают реализацию вычислительным устройством способа управления рисками для роботов для сноса сооружений.
В соответствии с другим аспектом настоящего изобретения предложено компьютерное устройство, содержащее один или более процессоров и одно или более запоминающих устройств, причем одна или более программ хранятся на указанном одном или более запоминающих устройствах и выполнены с возможностью исполнения посредством указанного одного или более процессоров, а указанная одна или более программ содержат инструкции для реализации способа управления рисками для роботов для сноса сооружений.
Преимущественные эффекты: В процессе перемещения робота для сноса сооружений условия работы определяют в соответствии с информацией о положении робота для сноса сооружений. Для оценки категорий риска используют нейронную сеть. Если присутствуют только риски траектории перемещения, повторно планируют траекторию перемещения. Если идентифицированы только риски опрокидывания, определяют направление опрокидывания робота для сноса сооружений и в соответствии с направлением опрокидывания регулируют положение робота для сноса сооружений. В случаях, когда существуют как риски траектории перемещения, так и риски опрокидывания, приоритет направлен на риски опрокидывания, а затем на риски траектории перемещения. Такой подход снижает риски опрокидывания и риски траектории перемещения, с которыми сталкивается робот для сноса сооружений, перемещающийся в условиях сложных окружающих сред, что тем самым значительно повышает устойчивость и безопасность робота для сноса сооружений в условиях сложных окружающих сред.
Описание прилагаемых чертежей
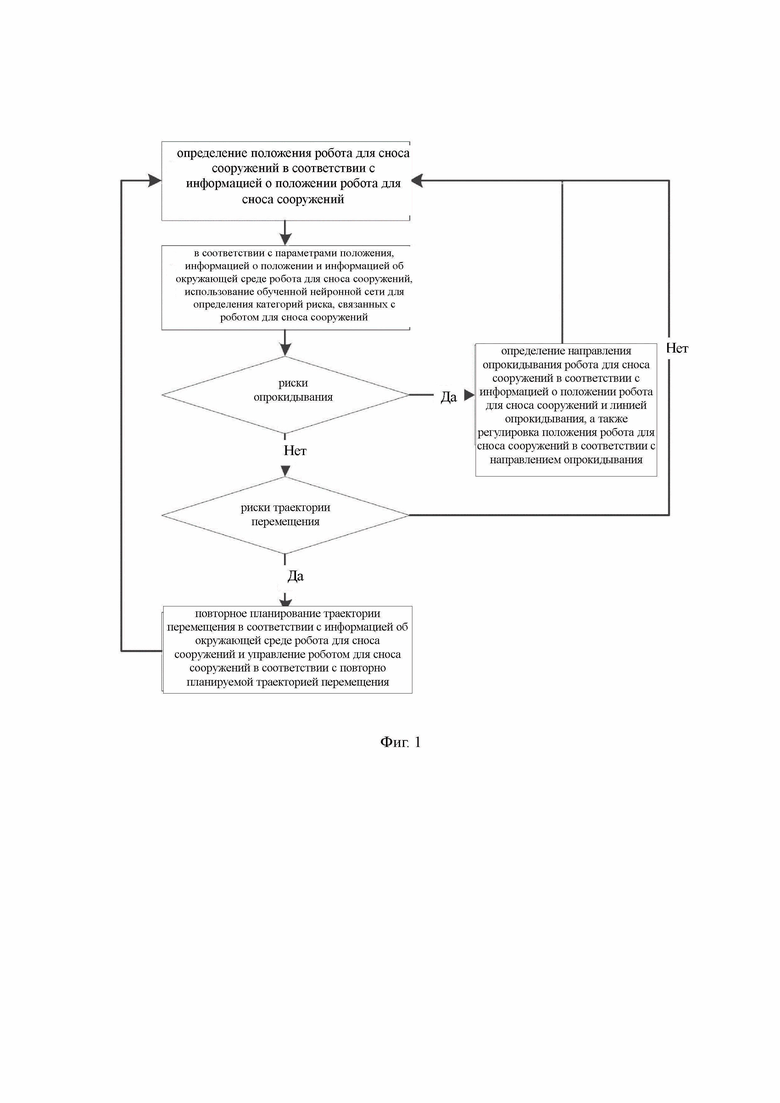
На фиг. 1 показана блок-схема первого способа в способе управления рисками для роботов для сноса сооружений;
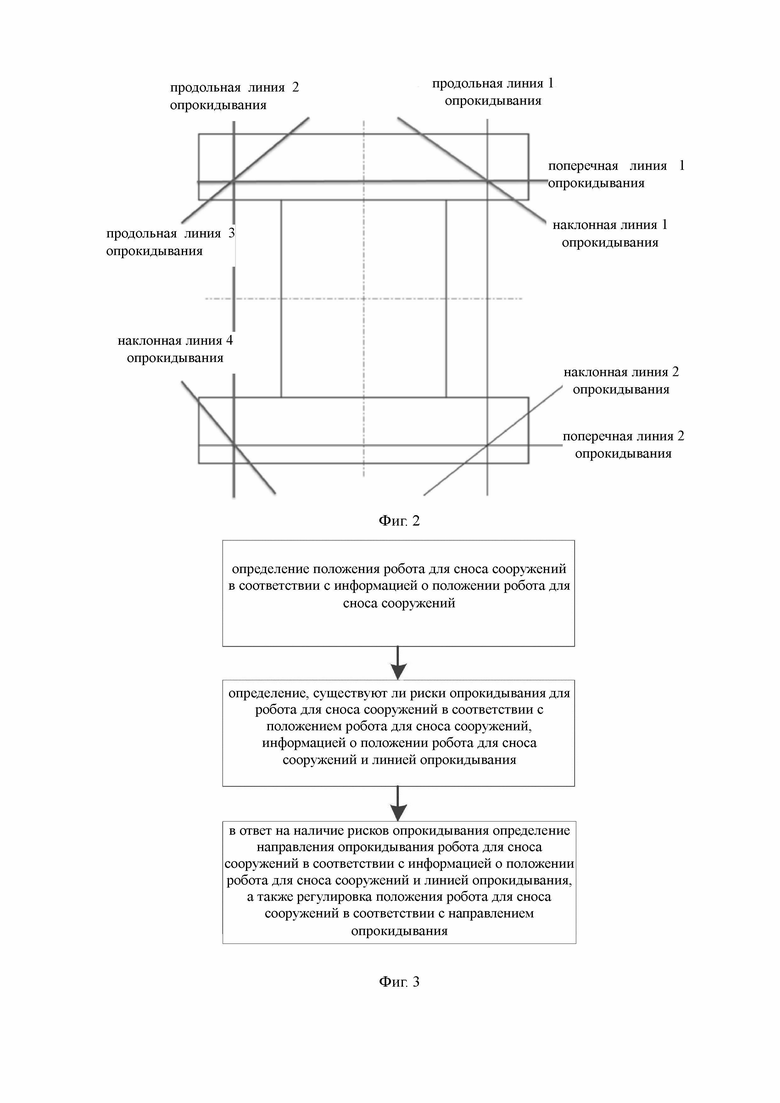
на фиг. 2 показано схематическое представление линии опрокидывания;
на фиг. 3 показана блок-схема второго способа в способе управления рисками для роботов для сноса сооружений;
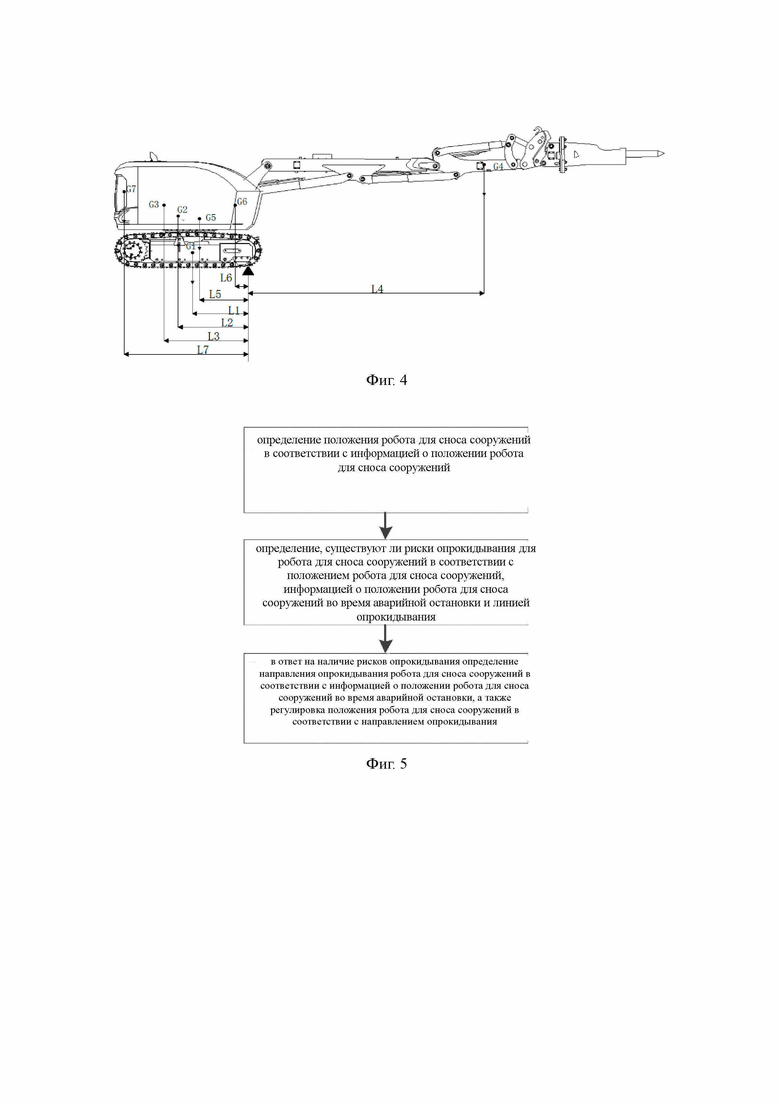
на фиг. 4 показано схематическое представление моментов в горизонтальном положении; и
на фиг. 5 показана блок-схема третьего способа в способе управления рисками для роботов для сноса сооружений.
Конкретные варианты осуществления
Технические схемы, представленные в вариантах осуществления настоящего изобретения, четко и полностью описаны ниже со ссылкой на чертежи, представленные в вариантах осуществления настоящего изобретения. Очевидно, что описанные варианты осуществления являются лишь иллюстративными и не являются всеми возможными вариантами осуществления настоящего изобретения. Описание по меньшей мере одного приведенного в качестве примера варианта осуществления, представленное ниже, носит исключительно иллюстративный характер и никоим образом не должно рассматриваться как ограничение настоящего изобретения, его применения или использования. На основании указанных вариантов осуществления настоящего изобретения все другие варианты осуществления, получаемые специалистами в данной области техники без творческого труда, также подпадают под объем настоящего изобретения.
Относительное расположение, числовые выражения и числовые значения компонентов и этапов, изложенные в этих вариантах осуществления, не ограничивают объем настоящего изобретения, если не указано иное.
При этом следует понимать, что для удобства описания размеры различных частей, показанных на чертежах, не выполнены в соответствии с реальными пропорциональными соотношениям.
Технологии, способы и устройства, известные специалистам в соответствующих областях техники, могут не обсуждаться подробно, но их следует рассматривать как часть спецификации при соответствующих обстоятельствах.
Во всех приведенных и обсуждаемых в настоящем документе примерах любые конкретные значения следует толковать исключительно как иллюстративные, а не как ограничивающие. Следовательно, другие примеры приведенных в качестве примета вариантов осуществления могут иметь различные значения.
Следует отметить, что на последующих чертежах аналогичные ссылочные цифры и буквы указывают на аналогичные элементы, поэтому после того, как элемент определен на одном чертеже, он не будет далее обсуждаться на следующих чертежах.
Для решения вопросов рисков, связанных с роботами для сноса сооружений в условиях сложной окружающей среды, в настоящем изобретении предложен способ управления рисками для роботов для сноса сооружений, который, в частности, включает первый способ, реализуемый в режиме реального времени во время процесса перемещения робота для сноса сооружений, второй способ, реализуемый в режиме реального времени в процессе работы робота для сноса сооружений, и третий способ для реализации аварийной остановки в процессе работы или во время процесса перемещения робота для сноса сооружений.
На фиг. 1 показана структурная схема варианта осуществления первого способа в соответствии с настоящим изобретением, который может быть исполнен посредством встроенного контроллера робота для сноса сооружений, причем способ реализуют в режиме реального времени во время процесса перемещения робота для сноса сооружений.
Как показано на фиг. 1, этап 1 варианта осуществления включает определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений.
Следует отметить, что информацию о положении используют для отражения положения робота для сноса сооружений, которое может включать в себя высоту гусениц, угол опрокидывания линии опрокидывания, длину плеча силы, проходящую между центром масс компонентов до соответствующей линии опрокидывания и т. д. Здесь информацию о высоте могут собирать при помощи лазерного радара, устанавливаемого на поворотной платформе, соединенной с гусеничным шасси, а высоту гусениц могут получать в соответствии с собранной высотой и калиброванными высотами гусеничного шасси и поворотной платформы; угол опрокидывания собирают при помощи датчиков опрокидывания, которые устанавливают в наклонном, поперечном и продольном направлениях гусеничного шасси, соответственно; а длину плеча силы также могут собирать при помощи вращающегося лазерного радара, который измеряет расстояние от центра масс до назначенной точки, расположенной на линии опрокидывания, а затем вычисляет длину плеча силы в соответствии с углом поворота лазерного радара.
Следует отметить, что в этом сценарии положение робота для сноса сооружений в основном включает в себя положения на подъеме, положения под уклон, наклонное и горизонтальное положения. Поскольку риски и управление, связанные с различными положениями, изменяются, для обеспечения возможности точного управления в некоторых вариантах осуществления процесс определения положения робота для сноса сооружений может представлять собой следующее:
(1) вычисление разностей передней и задней высот гусениц, расположенных на двух сторонах, в одинаковый момент времени, содержащихся в информации о положении, что можно выразить следующим образом:
∆h=h1-h2;
где ∆h представляет собой разность передней и задней высот одинаковой гусеницы, а h1 и h2 представляют переднюю и заднюю высоты одинаковой гусеницы;
(2) в ответ на то, что разность передней и задней высот гусениц, расположенных на двух сторонах, составляет больше 0 и больше первого порогового значения разности высот, определение того, что робот для сноса сооружений находится в положении перемещения на подъеме, причем указанные разности передней и задней высот гусениц, расположенных на двух сторонах, представляет собой параметры для положения перемещения на подъеме;

где первое пороговое значение разности высот может составлять 60 см, а разность передней и задней высот гусениц, расположенных на двух сторонах, могут использовать в качестве параметров для положения на подъеме;
в ответ на то, что разность передней и задней высот гусениц, расположенных на двух сторонах, составляет меньше 0 и меньше отрицательной величины первого порогового значения разности высот, определение того, что робот для сноса сооружений находится в положении под уклон, причем указанные разности передней и задней высот гусениц, расположенных на двух сторонах, представляют собой параметры для положения под уклон;
(3) вычисление разности высот между левой гусеницей и правой гусеницей в одинаковый момент времени, содержащихся в информации о положении, можно выразить следующим образом:
∆H=H1-H2;
где ∆H представляет собой разность высот между левой гусеницей и правой гусеницей, а H1 и H2 представляют собой высоту левой гусеницы и высоту правой гусеницы, соответственно;
(4) в ответ на то, что разность высот между левой гусеницей и правой гусеницей превышает второе пороговое значение разности высот, определение того, что робот для сноса сооружений находится в наклонном положении, что можно выразить следующим образом:

где второе пороговое значение разности высот может составлять 40 см, а разность высот между левой гусеницей и правой гусеницей могут использовать в качестве параметров для наклонного положения;
(5) в ответ на то, что разности передней и задней высот гусениц, расположенных на двух сторонах, находятся в диапазоне между первым пороговым значением и отрицательной величиной первого порогового значения, а разность высот между левой гусеницей и правой гусеницей не превышает второго порогового значения разности высот, определение того, что робот для сноса сооружений находится в горизонтальном положении, причем параметр горизонтального положения равен 0.
Снова со ссылкой на фиг. 1, этап 2 варианта осуществления включает, в соответствии с параметрами положения, информацией о положении и информацией об окружающей среде робота для сноса сооружений, использование обученной нейронной сети для определения категорий риска, связанных с роботом для сноса сооружений.
Следует отметить, что здесь нейронная сеть может использовать модель глубокого обучения ResNet50. До ввода параметров и информации в модель параметры положении и информация о положении сначала проходят фильтрацию и нормализацию. Информацию об окружающей среде, в основном состоящую из захваченных видеоизображений, сначала очищают от шума и ее размер изменяют до стандартного размера, составляющего 224x224 пикселей. Затем для получения категорий риска, связанных с роботом для сноса сооружений, предварительно обработанные данные вводят в модель. Например, в соответствии с параметрами положения и информацией о положении могут получать тенденцию изменения положения робота для сноса сооружений, что обеспечивает возможность оценки потенциальных рисков опрокидывания. Кроме того, для определения наличия рисков траектории перемещения из видеоизображений могут извлекать ключевую визуальную информацию, такую как окружающая местность и препятствия.
Снова со ссылкой на фиг. 1, этап 3 варианта осуществления включает, в ответ на категорию риска, представляющую собой исключительно риски траектории перемещения, повторное планирование траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений; и управление роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
Следует отметить, что информация об окружающей среде (например, видеоизображения) часто включает в себя информацию о местности, положении препятствий, уклонах и т. д. В ответ на наличие рисков траектории перемещения планирование траектории могут выполнять снова в соответствии с этой информацией.
Планирование траектории представляет собой задачу многокритериальной оптимизации, и могут определять целевую функцию, которая исчерпывающим образом учитывает множество целей во время процесса перемещения робота для сноса сооружений, содержащих высокоточное позиционирование, минимальное потребление энергии и безопасное уклонение от препятствий. Определив функцию для задачи многокритериальной оптимизации, которая выражается через математическую модель, и используя алгоритм многокритериальной оптимизации, могут находить оптимальные или близкие к оптимальным решения.
Пусть целевая функция будет F(x), где x представляет собой переменные решения, относящиеся к перемещению робота для сноса сооружений, содержащие параметры планирования траектории, параметры управления скоростью и т. д. Используя алгоритм многокритериальной оптимизации, могут находить набор решений, минимизирующий значение целевой функции (функции стоимости) и в то же время удовлетворяя ограничения целевой функции. Этот набор решений может содержать множество решений, каждое из которых представляет собой потенциальную стратегию перемещения робота для сноса сооружений. Посредством анализа набора решений могут определять оптимальное или близкое к оптимальному решение, обеспечивая поддержку и руководство для планирования траектории.
Например, F(x)=f1(x)+ f2(x)+f3(x);
где f1(x)=k1× (фактическая точность-целевая точность)2, f2(x)=k2× потребление энергии, f3(x)=k3× (безопасное расстояние уклонения от препятствий-пороговое значение безопасного расстояния), причем k1-k3 представляют собой весовые коэффициенты, используемые для регулировки приоритета различных целей, f1(x) представляет собой стоимость точности, а f2(x) обозначает стоимость потребления энергии; стоимость потребления энергии зависит, в частности, от способа приведения в движение робота для сноса сооружений; если он приводится в движение посредством электричества, стоимость потребления энергии представляет собой произведение потребления электроэнергии и стоимости электроэнергии, а если он приводится в движение посредством топлива, стоимость потребления энергии представляет собой произведение потребления топлива и стоимости топлива; и f3(x) представляет собой стоимость уклонения от препятствий, указывая на потерю безопасности робота для сноса сооружений в процессе уклонения от препятствий. Здесь, как правило, пороговое значение безопасного расстояния составляет 70 см.
Снова со ссылкой на фиг. 1, этап 4 варианта осуществления включает, в ответ на категорию риска, представляющую собой исключительно риски опрокидывания, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
Следует отметить, что робот для сноса сооружений опрокидывается по определенной линии опрокидывания, которая относится к оси, вокруг которой поворачивается все транспортное средство в ситуации опрокидывания.
Согласно имеющимся данным, линии опрокидывания в первую очередь включают в себя продольные линии опрокидывания, поперечные линии опрокидывания и наклонные линии опрокидывания. Продольные линии опрокидывания включают в себя пересечение вертикальной плоскости, где расположены центры передних шагающих колес, расположенных по обеим сторонам гусеничного шасси, с поверхностью земли, а также пересечение вертикальной плоскости, где расположены центры задних шагающих колес, расположенных по обеим сторонам, с поверхностью земли. Поперечные линии опрокидывания включают в себя пересечение вертикальной плоскости, где расположены шагающие колеса, расположенные с одной стороны гусеничного шасси, с поверхностью земли, и пересечение вертикальной плоскости, где расположены шагающие колеса, расположенные с другой стороны гусеничного шасси, с поверхностью земли. Наклонные линии опрокидывания представляют собой пересечения вертикальных плоскостей, где расположены точки пересечения, параллельные диагонали, с поверхностью земли, причем диагональ определяется четырехугольником, образованным всеми продольными и поперечными линиями опрокидывания, а точки пересечения находятся там, где пересекаются продольные и поперечные линии опрокидывания. Расположение линий опрокидывания можно видеть на фиг. 2, где показаны две продольные линии опрокидывания, две поперечные линии опрокидывания и четыре наклонные линии опрокидывания.
Следует отметить, что определение направления опрокидывания означает определение линии опрокидывания с максимальной вероятностью опрокидывания робота для сноса сооружений, поэтому в некоторых вариантах осуществления конкретный процесс определения направления опрокидывания робота для сноса сооружений может включать:
(41) в соответствии с углами опрокидывания на линиях опрокидывания, содержащихся в информации о положении, вычисление вероятности того, что каждый угол опрокидывания превысит соответствующие пороговое значение угла;
Следует отметить, что если предположить, что имеется всего N линий опрокидывания, где N=8, углы опрокидывания на каждой линии опрокидывания представлены как θ1-θN, соответствующие пороговые значения угла для каждой линии опрокидывания обозначены как[θ1]-[θN] (как правило, пороговое значение угла составляет 30°), а распределение вероятностей углов опрокидывания на каждой линии опрокидывания может быть выражено как P(θi), где i = 1, 2, …, N;
линию опрокидывания с максимальной вероятностью возникновения и наибольшим риском определяют посредством сравнения вероятностей превышения каждой линией опрокидывания порогового значения угла; пусть максимальная вероятность превышения порогового значения угла будет Pmax, выраженная как:
Pmax=max(P(θ1>[θ1]), P(θ2>[θ2]),…, P(θN>[θN]);
линия опрокидывания, соответствующая Pmax, представляет собой наиболее опасную линию опрокидывания, что означает, что робот для сноса сооружений с большой вероятностью опрокинется по этой линии;
(42) в соответствии с линией опрокидывания, соответствующей максимальной вероятности, определение направления опрокидывания робота для сноса сооружений.
Следует отметить, что после определения наиболее опасной линии опрокидывания будет известно направление опрокидывания с максимальной вероятностью.
Для предотвращения опрокидывания положение робота для сноса сооружений могут регулировать в соответствии с направлением опрокидывания, в частности, посредством управления механической рукой. Например, если робот для сноса сооружений с некоторой вероятностью опрокинется по продольной линии 1 опрокидывания, механическую руку следует втянуть; а если робот для сноса сооружений с некоторой вероятностью опрокинется по продольной линии 2 опрокидывания, механическую руку следует выдвинуть вперед. Регулировки в основном выполняют с помощью перемещения механической руки для изменения момента. Например, в трехсегментной конструкции механической руки все соединения между корпусом транспортного средства и первым сегментом, первым сегментом и вторым сегментом, вторым сегментом и третьим сегментом, а также третьим сегментом и рабочим органом реализуются посредством цилиндров. Выдвижение и втягивание цилиндров приводит к изменениям положения и дополнительным регулировкам моментов. Это представляет собой непрерывный процесс регулировки (относительно стандартная процедура, которая не будет здесь подробно описываться) до тех пор, пока не исчезнет риск опрокидывания робота для сноса сооружений.
Со ссылкой снова на фиг. 1, этап 5 варианта осуществления включает, в ответ на категории риска, содержащие риски опрокидывания и риски пути перемещения, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания, повторное планирование траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений после устранения рисков опрокидывания и управление роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
В соответствии с приведенным выше способом в процессе перемещения робота для сноса сооружений положение робота для сноса сооружений определяют в соответствии с информацией о положении робота для сноса сооружений. Для оценки категорий риска используют нейронную сеть. Если присутствуют только риски траектории перемещения, повторно планируют траекторию перемещения. Если идентифицированы только риски опрокидывания, определяют направление опрокидывания робота для сноса сооружений и в соответствии с направлением опрокидывания регулируют положение робота для сноса сооружений. В случаях, когда существуют как риски траектории перемещения, так и риски опрокидывания, приоритет направлен на риски опрокидывания, а затем риски траектории перемещения. Такой подход снижает риски опрокидывания и траектории перемещения, с которыми сталкивается робот для сноса сооружений, перемещающийся в условиях сложных окружающих сред, что тем самым значительно повышает устойчивость и безопасность робота для сноса сооружений в условиях сложных окружающих сред.
Следует отметить, что в сценарии помимо перемещения робот для сноса сооружений также будет выполнять работы, в основном включающие в себя работы по сносу сооружений, работы по точению камня и земляные работы. Во время этих работ на протяжении всего процесса для обеспечения устойчивости робот для сноса сооружений выдвигает свои окружающие опорные ноги.
Однако если конкретная опорная нога постоянно несет значительную нагрузку во время длительных работ, это значительно сокращает срок ее службы. Следовательно, в настоящем изобретении также предложен второй способ, реализуемый в режиме реального времени в процессе работы робота для сноса сооружений.
На фиг. 3 показана структурная схема варианта осуществления второго способа в соответствии с настоящим изобретением, который может быть исполнен посредством встроенного контроллера робота для сноса сооружений.
Как показано на фиг. 3, этап S1 варианта осуществления включает определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений.
Следует отметить, что процесс определения положения является таким же, как и в первом способе, и он не будет повторяться в настоящем документе.
Со ссылкой снова на фиг. 3, этап S2 варианта осуществления включает определение, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений и линией опрокидывания.
Следует отметить, что здесь риск опрокидывания относится к тенденции опрокидывания на одну сторону робота для сноса сооружений, указывая на то, что опорная нога, расположенная на этой стороне, испытывает значительную нагрузку и требует регулировки.
Поскольку опорные ноги поддерживают робота для сноса сооружений, оценку могут основывать непосредственно на моментах, а конкретный процесс может представлять собой следующее:
(S21) вычисление коэффициента устойчивости робота для сноса сооружений в соответствии с длиной плеча силы, проходящей между центром масс компонентов робота для сноса сооружений, содержащимся в информации о положении, и соответствующей линией опрокидывания, причем соответствующая линия опрокидывания представляет собой линию опрокидывания, соответствующую положению робота для сноса сооружений;
центр масс компонентов робота для сноса сооружений можно видеть на фиг. 4 и 5, где можно видеть, что соответствующие линии опрокидывания являются различными в различных положениях; на фиг. 4 показано горизонтальное положение, так что соответствующая линия опрокидывания представляет собой продольную линию 1 опрокидывания; линия опрокидывания, соответствующая положению на подъеме, представляет собой продольную линию 2 опрокидывания; другие положения соответствуют различным линиям опрокидывания; например, положение под уклон соответствует продольной линии 1 опрокидывания, а опрокидывание в одну сторону соответствует боковой линии опрокидывания;
коэффициент устойчивости робота для сноса сооружений может представлять собой отношение стабилизирующего момента робота для сноса сооружений к опрокидывающему моменту, которое может представлять собой следующее:
K=M1/M0;
M1=G7×L7+ G6×L6+ G5×L5+ G3×L3+ G2×L2+ G1×L1;
M0=G4×L4;
где K представляет собой коэффициент устойчивости робота для сноса сооружений, M1 представляет собой стабилизирующий момент робота для сноса сооружений, M0 представляет собой опрокидывающий момент робота для сноса сооружений, G7-G1 представляют собой гравитационные силы кабины, механической руки, гидравлической системы, электрической системы, силовой системы, поворотной платформы и гусеничного шасси робота для сноса сооружений, соответственно, а L7-L1 представляют собой расстояние между центром масс кабины и соответствующей линией опрокидывания, расстояние между центром масс механической руки и соответствующей линией опрокидывания, расстояние между центром масс гидравлической системы и соответствующей линией опрокидывания, расстояние между центром масс электрической системы и соответствующей линией опрокидывания, расстояние между центром масс силовой системы и соответствующей линией опрокидывания, расстояние между центром масс поворотной платформы и соответствующей линией опрокидывания, расстояние между центром масс гусеничного шасси и соответствующей линией опрокидывания, соответственно;
(S22) в ответ на то, что коэффициент устойчивости робота для сноса сооружений будет меньше порогового значения устойчивости (как правило, 1,15), определение, что робот для сноса сооружений имеет риски опрокидывания.
Со ссылкой снова на фиг. 3, этап S3 варианта осуществления включает, в ответ на наличие рисков опрокидывания, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
Следует отметить, что способ определения направления опрокидывания робота для сноса сооружений и способ регулировки соответствуют первому способу, и они не будут повторяться в настоящем документе.
В соответствии с приведенным выше способом в процессе работы робота для сноса сооружений положение робота для сноса сооружений определяют в соответствии с информацией о положении робота для сноса сооружений. Наличие рисков опрокидывания оценивают на основе стабилизирующего момента и опрокидывающего момента, а при наличии рисков опрокидывания определяют направление опрокидывания робота для сноса сооружений. Затем положение робота для сноса сооружений регулируют в соответствии с направлением опрокидывания, тем самым регулируя силу, прикладываемую к опорным ногам, и снижая риск повреждения. Это значительно повышает устойчивость и безопасность робота для сноса сооружений в условиях сложных окружающих сред.
Следует отметить, что во время процессов перемещения и работы робота для сноса сооружений могут возникать чрезвычайные ситуации, такие как отказы компонентов, утечки масла или низкий уровень заряда батарей. В таких случаях дистанционное управление подаст команду аварийной остановки. В этот момент робот для сноса сооружений может столкнуться с риском опрокидывания вследствие инерции; например, если он внезапно остановится во время перемещения вперед, он может опрокинуться вперед. Следовательно, в настоящем изобретении также предложен третий способ реализации аварийной остановки в процессе работы или во время процесса перемещения робота для сноса сооружений.
На фиг. 5 показана структурная схема варианта осуществления третьего способа в соответствии с настоящим изобретением, который может быть исполнен посредством встроенного контроллера робота для сноса сооружений.
Как показано на фиг. 5, этап A1 варианта осуществления включает определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений.
Следует отметить, что процесс определения положения является таким же, как и в первом способе, и он не будет повторяться в настоящем документе.
Со ссылкой снова на фиг. 5, этап A2 варианта осуществления включает определение, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений во время аварийной остановки и линией опрокидывания.
Следует отметить, что конкретный процесс в соответствии с этим этапом является таким же, как и во втором способе, и он не будет повторяться в настоящем документе.
Со ссылкой снова на фиг. 5, этап A3 варианта осуществления включает, в ответ на наличие рисков опрокидывания, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений во время аварийной остановки; а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
Следует отметить, что опрокидывание может происходить вследствие инерции во время аварийной остановки. Следовательно, для определения соответствующих линии и направления опрокидывания требуется знать только положение в момент аварийной остановки. Если взять пример аварийной остановки при перемещении вперед, то направление опрокидывания будет направлено вперед, а соответствующая линия опрокидывания будет представлять собой продольную линию 1 опрокидывания.
Следует отметить, что способы регулировки соответствуют способам первого способа, которые в настоящем документе повторяться не будут.
В соответствии с приведенным выше способом во время аварийной остановки робота для сноса сооружений положение робота для сноса сооружений определяют на основании информации о положении робота для сноса сооружений. Наличие рисков опрокидывания оценивают на основе стабилизирующего момента и опрокидывающего момента, а при наличии рисков опрокидывания определяют направление опрокидывания робота для сноса сооружений. Затем регулируют положение робота для сноса сооружений в соответствии с направлением опрокидывания, тем самым обеспечивая устойчивость во время аварийной остановки. Это значительно повышает устойчивость и безопасность робота для сноса сооружений в условиях сложных окружающих сред.
В настоящем изобретении также предложено виртуальное устройство, соответствующее приведенному выше способу, а именно устройство для управления рисками для роботов для сноса сооружений, которое может быть загружено во встроенный контроллер робота для сноса сооружений и исполнено посредством его и, в частности, содержит первое устройство, работающее в режиме реального времени во время процесса перемещения робота для сноса сооружений, второе устройство, работающее в режиме реального времени в процессе работы робота для сноса сооружений, и третье устройство для реализации аварийной остановки в процессе работы или во время процесса перемещения робота для сноса сооружений.
Первое устройство содержит модуль условий работы, модуль категорий риска, модуль планирования траектории и модуль управления устойчивостью.
В этом варианте осуществления модуль условий работы выполнен с возможностью определения положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений.
В этом варианте осуществления модуль категорий риска выполнен с возможностью использования обученной нейронной сети для определения категорий риска, связанных с роботом для сноса сооружений, в соответствии с параметрами положения, информацией о положении и информацией об окружающей среде робота для сноса сооружений.
В этом варианте осуществления модуль планирования траектории выполнен с возможностью, в ответ на категорию риска, представляющую собой исключительно риски траектории перемещения, повторного планирования траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений и управления роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
В этом варианте осуществления модуль управления устойчивостью выполнен с возможностью, в ответ на категорию риска, представляющую собой исключительно риски опрокидывания, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировки положения робота для сноса сооружений в соответствии с направлением опрокидывания.
Второе устройство содержит модуль условий работы, модуль оценки рисков и первый модуль регулировки положения.
В этом варианте осуществления модуль условий работы выполнен с возможностью определения положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений.
В этом варианте осуществления модуль оценки рисков выполнен с возможностью определения, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений и линией опрокидывания.
В этом варианте осуществления первый модуль регулировки положения выполнен с возможностью, в ответ на наличие рисков опрокидывания, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировки положения робота для сноса сооружений в соответствии с направлением опрокидывания.
Третье устройство содержит модуль условий работы, модуль оценки рисков и второй модуль регулировки положения.
В этом варианте осуществления модуль условий работы выполнен с возможностью определения положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений.
В этом варианте осуществления модуль оценки рисков выполнен с возможностью определения, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений во время аварийной остановки и линией опрокидывания.
В этом варианте осуществления второй модуль регулировки положения выполнен с возможностью, в ответ на наличие рисков опрокидывания, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений во время аварийной остановки, а также регулировки положения робота для сноса сооружений в соответствии с направлением опрокидывания.
Описанное выше устройство обеспечивает устойчивость робота для сноса сооружений во время перемещения, работы и аварийных остановок, эффективно повышая устойчивость и безопасность робота для сноса сооружений в условиях сложных окружающих сред.
На основе той же технической схемы настоящее изобретение также относится к машиночитаемому носителю информации, причем машиночитаемый носитель информации хранит одну или более программ, а указанная одна или более программ содержат инструкции, которые при исполнении вычислительным устройством вызывают реализацию вычислительным устройством способа управления рисками для роботов для сноса сооружений.
На основе той же технической схемы настоящее изобретение также относится к компьютерному устройству, содержащему один или более процессоров и одно или более запоминающих устройств, причем одна или более программ хранятся на указанном одном или более запоминающих устройствах и выполнены с возможностью исполнения посредством указанного одного или более процессоров, а указанная одна или более программ содержат инструкции для реализации способа управления рисками для роботов для сноса сооружений.
Специалистам в данной области техники следует понимать, что варианты осуществления настоящего изобретения могут быть представлены в виде способов, систем или компьютерных программных продуктов. Следовательно, настоящее изобретение может принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления или варианта осуществления, объединяющего программные и аппаратные аспекты. Кроме того, настоящее изобретение может принимать форму компьютерного программного продукта, реализованного на одном или более носителях информации, применимых для использования компьютером (включая, среди прочего магнитную дисковую память, CD-ROM, оптическую память и т. д.), содержащих программный код, применимый для использования компьютером.
Настоящее изобретение описано со ссылкой на блок-схемы/или структурные схемы способа, устройства (системы) и компьютерного программного продукта в соответствии с вариантами осуществления настоящего изобретения. Следует понимать, что каждый поток и/или блок в блок-схемах и/или структурных схемах, а также комбинации потоков и/или блоков в блок-схемах и/или структурных схемах могут реализовывать посредством инструкций компьютерной программы. Эти инструкции компьютерной программы могут обеспечивать на процессор компьютера общего назначения, компьютера специального назначения, встроенный процессор или другое программируемое устройство для обработки данных для создания машины таким образом, что инструкции, исполняемые указанным процессором компьютера или другим программируемым устройством для обработки данных, создают устройство для реализации функций, указанных в одном или более потоках в блок-схемах и/или одном или более блоках в структурных схемах.
Эти инструкции компьютерной программы также могут хранить в машиночитаемом запоминающем устройстве, что может вызывать функционирование компьютера или другого программируемого устройства для обработки данных конкретным образом, так что инструкции, хранящиеся в машиночитаемом запоминающем устройстве, создают продукт производства, включающий в себя устройство для исполнения инструкций, которое реализует функции, указанные в одном или более потоках в блок-схемах и/или одном или более блоках в структурных схемах.
Эти инструкции компьютерной программы также могут загружать в компьютер или другое программируемое устройство для обработки данных таким образом, что на компьютере или другом программируемом устройстве выполняется серия рабочих этапов для создания реализуемого компьютером процесса, а инструкции, исполняемые на компьютере или другом программируемом устройстве, обеспечивают этапы для реализации функций, указанных в одном или более потоках в блок-схемах/или одном или более блоках в блок-схемах.
Изложенное выше представляет собой только варианты осуществления настоящего изобретения и не предназначено для его ограничения. Любые изменения, эквивалентные замены, усовершенствования и т. д., выполненные на основе сущности и принципов настоящего изобретения, должны быть включены в объем прилагаемой формулы изобретения.
Изобретение относится к области вычислительной техники. Технический результат заключается в снижении рисков опрокидывания и рисков, связанных с траекторией перемещения, с которыми сталкивается робот для сноса сооружений в условиях сложных окружающих сред. Технический результат достигается за счет того, что в процессе перемещения робота для сноса сооружений условия работы определяют в соответствии с информацией о положении робота для сноса сооружений. Для оценки категорий риска используют нейронную сеть. Если присутствуют только риски траектории перемещения, повторно планируют траекторию перемещения. Если идентифицированы только риски опрокидывания, определяют направление опрокидывания робота для сноса сооружений и в соответствии с направлением опрокидывания регулируют положение робота для сноса сооружений. В случаях, когда существуют как риски траектории перемещения, так и риски опрокидывания, приоритет направлен на риски опрокидывания, а затем риски траектории перемещения. 4 н. и 6 з.п. ф-лы, 5 ил.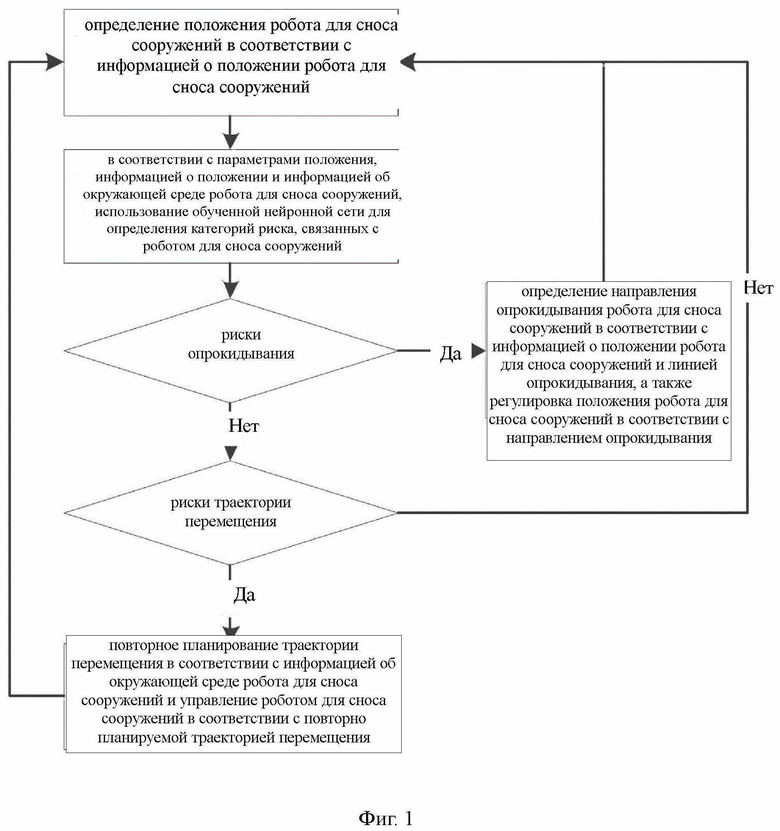
1. Способ управления рисками для роботов для сноса сооружений, включающий первый способ, реализуемый в режиме реального времени во время процесса перемещения робота для сноса сооружений, причем первый способ включает:
определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
в соответствии с параметрами положения, информацией о положении и информацией об окружающей среде робота для сноса сооружений, использование обученной нейронной сети для определения категорий риска, связанных с роботом для сноса сооружений;
в ответ на категорию риска, представляющую собой исключительно риски траектории перемещения, повторное планирование траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений; и управление роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения;
в ответ на категорию риска, представляющую собой исключительно риски опрокидывания, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания; и
в ответ на категории риска, содержащие риски опрокидывания и риски пути перемещения, определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания, повторное планирование траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений после устранения рисков опрокидывания и управление роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
2. Способ управления рисками для роботов для сноса сооружений по п. 1, дополнительно включающий второй способ, реализуемый в режиме реального времени в процессе работы робота для сноса сооружений, причем второй способ включает:
определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
определение, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений и линией опрокидывания; и
в ответ на наличие рисков опрокидывания определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
3. Способ управления рисками для роботов для сноса сооружений по п. 2, в котором определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания включает:
в соответствии с углами опрокидывания на линиях опрокидывания, содержащихся в информации о положении, вычисление вероятности того, что каждый угол опрокидывания превысит соответствующие пороговое значение угла; и
в соответствии с линией опрокидывания, соответствующей максимальной вероятности, определение направления опрокидывания робота для сноса сооружений.
4. Способ управления рисками для роботов для сноса сооружений по п. 1, дополнительно включающий третий способ реализации аварийной остановки в процессе работы или во время процесса перемещения робота для сноса сооружений, причем третий способ включает:
определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
определение, имеет ли робот для сноса сооружений риски опрокидывания в соответствии с положением робота для сноса сооружений, информацией о положении робота для сноса сооружений во время аварийной остановки и линией опрокидывания; и
в ответ на наличие рисков опрокидывания определение направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений во время аварийной остановки; а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания.
5. Способ управления рисками для роботов для сноса сооружений по п. 2 или 4, в котором определение, имеет ли робот для сноса сооружений риски опрокидывания, включает:
вычисление коэффициента устойчивости робота для сноса сооружений в соответствии с длиной плеча силы, проходящей между центром масс компонентов робота для сноса сооружений, содержащимся в информации о положении, и соответствующей линией опрокидывания, причем коэффициент устойчивости робота для сноса сооружений представляет собой отношение стабилизирующего момента робота для сноса сооружений к опрокидывающему моменту, а соответствующая линия опрокидывания представляет собой линию опрокидывания, соответствующую положению робота для сноса сооружений; и
в ответ на то, что коэффициент устойчивости робота для сноса сооружений будет меньше порогового значения устойчивости, определение, что робот для сноса сооружений имеет риски опрокидывания.
6. Способ управления рисками для роботов для сноса сооружений по п. 5, в котором формула для вычисления коэффициента устойчивости робота для сноса сооружений представляет собой
K=M1/M0;
M1=G7×L7+ G6×L6+ G5×L5+ G3×L3+ G2×L2+ G1×L1;
M0=G4×L4;
где K представляет собой коэффициент устойчивости робота для сноса сооружений, M1 представляет собой стабилизирующий момент робота для сноса сооружений, M0 представляет собой опрокидывающий момент робота для сноса сооружений, G7-G1 представляют собой гравитационные силы кабины, механической руки, гидравлической системы, электрической системы, силовой системы, поворотной платформы и гусеничного шасси робота для сноса сооружений соответственно, а L7-L1 представляют собой расстояние между центром масс кабины и соответствующей линией опрокидывания, расстояние между центром масс механической руки и соответствующей линией опрокидывания, расстояние между центром масс гидравлической системы и соответствующей линией опрокидывания, расстояние между центром масс электрической системы и соответствующей линией опрокидывания, расстояние между центром масс силовой системы и соответствующей линией опрокидывания, расстояние между центром масс поворотной платформы и соответствующей линией опрокидывания, расстояние между центром масс гусеничного шасси и соответствующей линией опрокидывания соответственно.
7. Способ управления рисками для роботов для сноса сооружений по п. 1, 2 или 4, в котором определение положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений включает:
вычисление разностей передней и задней высот гусениц, расположенных на двух сторонах, в одинаковый момент времени, содержащихся в информации о положении;
в ответ на то, что разность передней и задней высот гусениц, расположенных на двух сторонах, составляет больше 0 и больше первого порогового значения разности высот, определение того, что робот для сноса сооружений находится в положении на подъеме, причем указанные разности передней и задней высот гусениц, расположенных на двух сторонах, представляют собой параметры для положения на подъеме;
в ответ на то, что разность передней и задней высот гусениц, расположенных на двух сторонах, составляет меньше 0 и меньше отрицательной величины первого порогового значения разности высот, определение того, что робот для сноса сооружений находится в положении под уклон, причем указанные разности передней и задней высот гусениц, расположенных на двух сторонах, представляют собой параметры для положения под уклон;
вычисление разности высот между левой гусеницей и правой гусеницей в одинаковый момент времени, содержащихся в информации о положении;
в ответ на то, что разность высот между левой гусеницей и правой гусеницей превышает второе пороговое значение разности высот, определение того, что робот для сноса сооружений находится в наклонном положении, причем указанная разность высот между левой гусеницей и правой гусеницей представляет собой параметр наклонного положения; и
в ответ на то, что разности передней и задней высот гусениц, расположенных на двух сторонах, находятся в диапазоне между первым пороговым значением и отрицательной величиной первого порогового значения, а разность высот между левой гусеницей и правой гусеницей не превышает второго порогового значения разности высот, определение того, что робот для сноса сооружений находится в горизонтальном положении, причем параметр горизонтального положения равен 0.
8. Устройство для управления рисками для роботов для сноса сооружений, содержащее первое устройство, выполненное с возможностью работы в режиме реального времени во время процесса перемещения робота для сноса сооружений, причем первое устройство содержит:
модуль условий работы, выполненный с возможностью определения положения робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений;
модуль категорий риска, выполненный с возможностью использования обученной нейронной сети для определения категорий риска, связанных с роботом для сноса сооружений, в соответствии с параметрами положения, информацией о положении и информацией об окружающей среде робота для сноса сооружений;
модуль планирования траектории, выполненный с возможностью, в ответ на категорию риска, представляющую собой исключительно риски траектории перемещения, повторного планирования траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений и управления роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения;
модуль управления устойчивостью, выполненный с возможностью, в ответ на категорию риска, представляющую собой исключительно риски опрокидывания, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, а также регулировку положения робота для сноса сооружений в соответствии с направлением опрокидывания; и
модуль последовательного управления, выполненный с возможностью, ответ на категории риска, содержащие риски опрокидывания и риски пути перемещения, определения направления опрокидывания робота для сноса сооружений в соответствии с информацией о положении робота для сноса сооружений и линией опрокидывания, регулировки положения робота для сноса сооружений в соответствии с направлением опрокидывания, повторного планирования траектории перемещения в соответствии с информацией об окружающей среде робота для сноса сооружений после устранения рисков опрокидывания и управления роботом для сноса сооружений в соответствии с повторно планируемой траекторией перемещения.
9. Машиночитаемый носитель информации, выполненный с возможностью хранения одной или более программ, причем указанная одна или более программ содержат инструкции, которые при исполнении вычислительным устройством вызывают реализацию вычислительным устройством способа по любому из пп. 1-7.
10. Компьютерное устройство, содержащее:
один или более процессоров и одно или более запоминающих устройств, причем одна или более программ хранятся на указанном одном или более запоминающих устройствах и выполнены с возможностью исполнения посредством указанного одного или более процессоров, а указанная одна или более программ содержат инструкции для реализации способа по любому из пп. 1-7.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |

