Изобретение относится к робототехнике, а именно к мобильным роботам робототехнических комплексов, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором.
Известен мобильный робот, входящий в состав мобильного робототехнического комплекса по патенту МПК B25J 5/00, RU 2364500 С2, Бюл. №23 от 20.08.2009. Владелец патента открытое акционерное общество «КОВРОВСКИЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАВОД» (ОАО «КЭМЗ») (RU). Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. Мобильный робототехнический комплекс снабжен выносной системой видеонаблюдения. Мобильный робот дополнительно включает комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее к кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце. При этом мобильный робот включает в себя двигатель с приводом, установленный на оси, направляющий элемент, средства питания, управления, и информационного обеспечения, а также раму.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование системы, что в свою очередь ведет к невозможности осуществления расширения функциональных возможностей.
Наиболее близким по технической сущности является мобильный робот по патенту RU 2824025 C1, опубл. 31.07.2024 Бюл. №22, по заявке №2023123000, от 04.09.2023 - авторы Литвиненко А.М., Крылов Ю.М. Мобильный робот содержит раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме, при этом рама выполнена в виде швеллеров, соединенных друг с другом своими боковыми сторонами уступами, образованными выдвижением крайних швеллеров в разные стороны относительно среднего швеллера, при этом один из крайних швеллеров соединен с осью упомянутого привода, а на другом крайнем швеллере установлена поворотная ось направляющего колеса, связанная с приводом ее поворота.
Недостатком данного робота является недостаточная приспособленность к рельефу местности, в частности к наклону грунта в горизонтальной плоскости.
Изобретение направлено на улучшение эксплуатационных характеристик, в частности адаптации к рельефу местности.
Это достигается тем, что мобильный робот, содержащий раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме, между швеллерами установлены горизонтальные планки с шарниром, ось которого параллельна направлению движения робота, причем робот снабжен приводом поворота относительно оси шарнира в плоскости, перпендикулярно направлению движения.
Конструкция робота по предлагаемому изобретению поясняется чертежом, где на Фиг. 1 показан мобильный робот вид сбоку, на Фиг. 2 - привод поворота относительно оси шарнира, на Фиг. 3 схематично показан вид сзади при горизонтальной поверхности, на Фиг. 4 - то же, но при преодолении возвышенности, на Фиг. 5 - то же при преодолении уклона.
Робот включает в себя направляющее колесо 1, установленное в вилке 2. Вилка установлена в колонке 3, которое с помощью проставки 4 закреплена на раме 5. Имеется привод поворота с двигателем 6. Робот снабжен блоком управления 7, телекамерой 8, установленной на стойке 9, боковым колесом 10, приводом поворота относительно оси шарнира 11 и тяговым колесом 12. Рама представляет собой набор швеллеров, например 13 и 14, ориентированных вдоль направления перемещения, причем между средними из них, например швеллеров 13 и 14, установлены горизонтальные планки 15 и 16 с шарниром 17. К боковым стенками швеллеров присоединены планки 18 и 19, к которым с помощью шарниров 20 крепится привод поступательного перемещения 21 со штоками. Таким образом, ось шарнира 17 ориентирована по направлению движения, а привод поворота осуществляет поворот относительно этой оси в плоскости перпендикулярно направлению движения.
Мобильный робот функционирует следующим образом. Вначале оператор дает дистанционную команду с пульта управления для начала работы мобильного робота. Далее производится самодиагностика всех модулей робота и по беспроводному интерфейсу данные выводятся на экран оператору. При получении команды вперед, воспринимаемой антенной, привод приводит во вращение колесо 12, робот начинает движение. Устойчивому состоянию способствует колесо 10. При изменении направления движения команда подается на двигатель 6, который через шкивы и гибкий элемент осуществляет поворот колеса 1. При подходе к препятствию, которое фиксируется или телекамерой 8, или датчиком наклона, входящим в состав блока управления 7, подается команда на привод 21, который осуществляет выдвижение штоков и, соответствующим образом, поворот по оси шарнира 17. Привод на Фигурах 3, 4, 5 условно не показан, чтобы не загромождать чертеж. На горизонтальной поверхности полки швеллеров 13 и 14 также находятся в горизонтальной плоскости (см. Фиг. 3). При преодолении наклона штоки привода поступательного перемещения 21 вдвигаются, происходит деформация рамы, показанная на Фиг. 4. При преодолении уклона, наоборот, штоки выдвигаются, полученная конфигурация показана на Фиг. 5.
Технико-экономическим преимуществом является введение в состав рамы робота шарнира, установленного между средними швеллерами, расширяет функциональные возможности робота, облегчает преодоление разного рода препятствий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот мобильный | 2024 |
|
RU2839641C1 |
| Информационный мобильный робот | 2024 |
|
RU2839732C1 |
| Робот мобильный | 2024 |
|
RU2841232C1 |
| Информационный мобильный робот | 2024 |
|
RU2837077C1 |
| Мобильный робот | 2024 |
|
RU2841234C1 |
| Мобильный робот | 2023 |
|
RU2824025C1 |
| Мобильный информационный робот | 2024 |
|
RU2839879C1 |
| Колесо мобильного робота | 2024 |
|
RU2835523C1 |
| Робот мобильный | 2024 |
|
RU2834078C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |

Изобретение относится к робототехнике, а именно к мобильным роботам робототехнических комплексов, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором. Мобильный робот содержит раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме. Рама представляет собой набор швеллеров, ориентированных вдоль направления перемещения, между средними из швеллеров установлены горизонтальные планки с шарниром, ось которого параллельна направлению движения робота. Робот снабжен приводом поворота относительно оси шарнира в плоскости, перпендикулярной направлению движения. Обеспечивается улучшение эксплуатационных характеристик, в частности адаптации к профилю местности. 5 ил.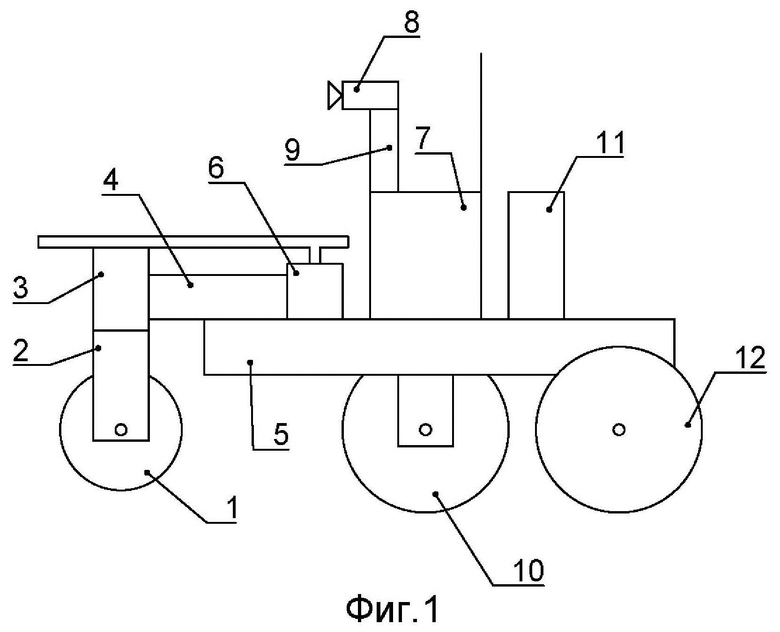
Мобильный робот, содержащий раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме, отличающийся тем, что рама представляет собой набор швеллеров, ориентированных вдоль направления перемещения, между средними из швеллеров установлены горизонтальные планки с шарниром, ось которого параллельна направлению движения робота, причем робот снабжен приводом поворота относительно оси шарнира в плоскости, перпендикулярной направлению движения.
| Мобильный робот | 2023 |
|
RU2824025C1 |
| ВЫРАВНИВАЮЩАЯ ГРУППА ДЛЯ АВТОВЫШЕК | 2015 |
|
RU2711828C2 |
| Устройство для срезания сучьев с поваленных деревьев | 1983 |
|
SU1130475A1 |
| KR 2012104864 A, 24.09.2012 | |||
| Учебное наглядное пособие по арифметике | 1950 |
|
SU91964A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |

