(54) АВТОРУЛЕВОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перестройки параметровАВТОРулЕВОгО | 1979 |
|
SU830325A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Устройство для управления курсом судна | 1984 |
|
SU1227546A1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| Устройство для управления тиристорным преобразователем частоты | 1986 |
|
SU1573513A1 |
| Устройство для автоматической стабилизации судна с буксируемой сейсмопьезокосой на заданной траектории | 1978 |
|
SU744484A1 |
1
Изобретение относится к судостроению, в частности к авторулевым.
Известен авторулевой, содержащий командный орган, связанный с приводом руля, а также последовательно соединенные индукционный датчик курса и электронный блок выработки сигналов индукционного датчика курса 1.
Авторулевой характеризуется недостаточной надежностью работы.
Цель изобретения - повышение надежности работы.
Для достижения цели авторулевой снабжен аналоговым вычислителем, включающим первый электронный ключ, соединенное с ним первое запоминающее устройство, второй электронный ключ, соединенное с ним с ним второе запоминающее устройство, первый и второй умножители и подключенный к их выходам сумматор, причем выход первого запоминающего устройства подключен к первому входу второго умножителя, выход второго запоминающего устройства подключен к первому входу первого умножителя, а выход сумматора связан с приводом руля, при этом первый выход электронного блока обработки сигналов индукционного датчика курса соединен с вторым входом первого умножителя и первым электронным ключом, второй выход упомянутого блока - с вторым входом второго умножителя и вторым электронным ключом, а первый и второй электронные ключи связаны с выходом командного органа.
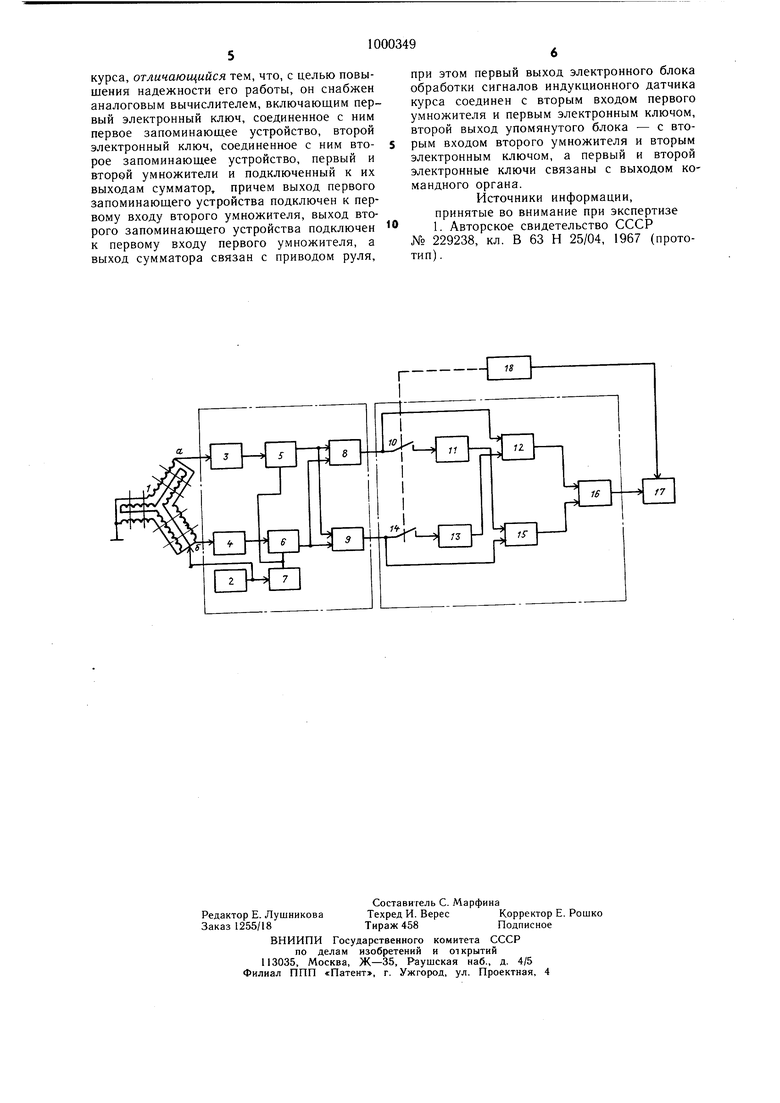
На чертеже представлена блок-схема авторулевого.
Авторулевой содержит индукционный датчик 1 курса, обмотка питания которого
10 соединена с выходом генератора 2, один из выводов сигнальной обмотки датчика 1 соединен с общей точкой схемы, а два других а и б подключены соответственно к входам резонансных усилителей 3 и 4, выходы
15 которых соединены с входами фазочувствительных выпрямителей 5 и 6, напряжение коммутации на которые поступает от генератора через блок 7 удвоения. Выход фазочувствительного выпрямителя 5 соединен с неинвертирующим входом суммато ° ра 8 и с неинвертирующим входом сумматора 9, а выход выпрямителя 6 соединен с инвертирующим входом сумматора 8 и с неинвертирующим входом сумматора 9. Выход сумматора 8 через электронный ключ 10 соединен с входом запоминающего устройства 11 и непосредственно с одним из входов аналогового блока 12 умножения, к другому входу которого подключен выход запоминающего устройства 13, вход которого подключен через электронный ключ 14к выходу сумматора 9, соединенному с од ним из входов аналогового блока 15 умножения, к другому входу которого подключен выход запоминающего устройства 11. блока 12 подключен к неинвертирующему входу сумматора 16, а выход блока 15- к его же инвертирующему входу. Выход сумматора 16 соединен с входом привода 17 руля. Другой вход привода руля и электронные ключи 10 и 14 соединены с выходом командного органа 18. Устройство работает следующим образом. На выводах а и б сигнальной обмотки датчика 1 формируются сигналы переменного тока, содержащие на частоте, равной удвоенной частоте питания, информацию о составляющих вектора индукции .магнитного поля Земли Ui В cos(cf+ 120°) и U2 Bcos(f- 120°), где В - величина индукции магнитного Ч - угол между направлением вектора В и измерительной осью датчика курса. Преобразование полезной информации в сигналы постоянного тока производится резонансными усилителями 3 и 4 и фазочувствительными выпрямителями (ФЧВ) 5 и 6. Сигнал Uj на выходе выпрямителя 5 пропорционален Bcos ( «f -ь120°), а сигнал U4 на выходе выпрямителя 6 - Bcos (cf - 120°). Сигнал LJj поступает на неинвертирующий вход сумматора 8, а сигнал и - на его инвертирующий вход. При одинаковых коэффициентах усиления по обоим входам сигнал Uj на выходе сумматора 8 равен (Bcos(cf+ 120°) - Bcos (cf-120°) К sins. Сигналы с выходов обоих ФЧВ поступают также на инвертирующие входы сумматора 9, сигнал Ug на выходе которого равенL/g KjhBcos (cf+120°) -Bcos () KjCOScf, где KI , Кг, Кз - коэффициенты пропорциональности. Ключи 10 и 14 управляются командным прибором так, что при изменении курса с помощью командного прибора они замкнуты, а в режиме стабилизации курса - разомкнуты. При замкнутых ключах 10 и 14 сигналы на выходах блоков 12 и 15 одинаковы и равны UgUe, а сигнал на выходе сумматора 16 окажется равен нулю. Сигнал на изменение курса при этом поступает на вход привода руля с выхода командного органа 18. При разомкнутых ключах 10 и 14 сигналы и и Ug на выходах устройств 12 и 15 пропорциональны KjSin cfo и ,, соотвец:твенно, где - угол между вектором В и измерительной осью датчика курса в момент замыкания ключей (при переходе в режим стабилизации заданного курса). Известно, что /ИХ В/ /а/-/ь/ sin (fo -), где () - угол между векторами а и В. С другой стороны, /ЗхЬ/ QX , где Qy, bx: - проекции векторов а и Тэ на ось ОХ, а QY и by - их же проекции на ось OY. Отсюда следует, что ,.CLy by 3.уЬуsm(,) ,,Проекциям а и Оу соответствуют сигналы с выходов устройств 11 и 13, пропорциональные компонентам вектора индукции магнитного поля Земли в связанной с объектом системе координат на заданном курсе, а проекциям Ь, и by соответствуют сигналы с выходов выпрямителей 5 и 6, пропорциональные текущим значениям аналогичных компонент вектора индукции. Таким образом, сигнал на выходе су.мматора 16, формируемый предлагаемым устройством, в соответствии с выражением (Обудет равен Ц K KjCoscf sin Чд- cosfo K K4sin( я-о ) или при малых значениях разности (), что характерно для условий работы авторулевого. fn - Этот сигнал поступает на вход привода руля и обеспечивает стабилизацию объекта на заданном курсе. Предлагаемый авторулевой прост по конструкции и надежности в работе. Формула изобретения Авторулевой, содержащий командный орган, связанный с приводом руля, а также последовательно соединенные индукционный датчик курса и электронный блок обработки сигналов индукционного датчика
курса, отличающийся тем, что, с целью повышения надежности его работы, он снабжен аналоговым вычислителем, включающим первый электронный ключ, соединенное с ним первое запоминающее устройство, второй электронный ключ, соединенное с ним второе запоминающее устройство, первый и второй умножители и подключенный к их выходам сумматор, причем выход первого запоминающего устройства подключен к первому входу второго умножителя, выход второго запоминающего устройства подключен к первому входу первого умножителя, а выход сумматора связан с приводом руля.
при этом первый выход электронного блока обработки сигналов индукционного датчика курса соединен с вторым входом первого умножителя и первым электронным ключом, второй выход упомянутого блока - с вторым входом второго умножителя и вторым электронным ключам, а первый и второй электронные ключи связаны с выходом командного органа.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 229238, кл. В 63 Н 25/04, 1967 (прототип) .
