Изобретение относится к кузнечно-прессо- вому оборудованию и может быть использовано в многопозиционных штамповоч ных автоматах.
Целью изобретения является повышение надежности работы и сокрашение времен на монтаж и демонтаж.
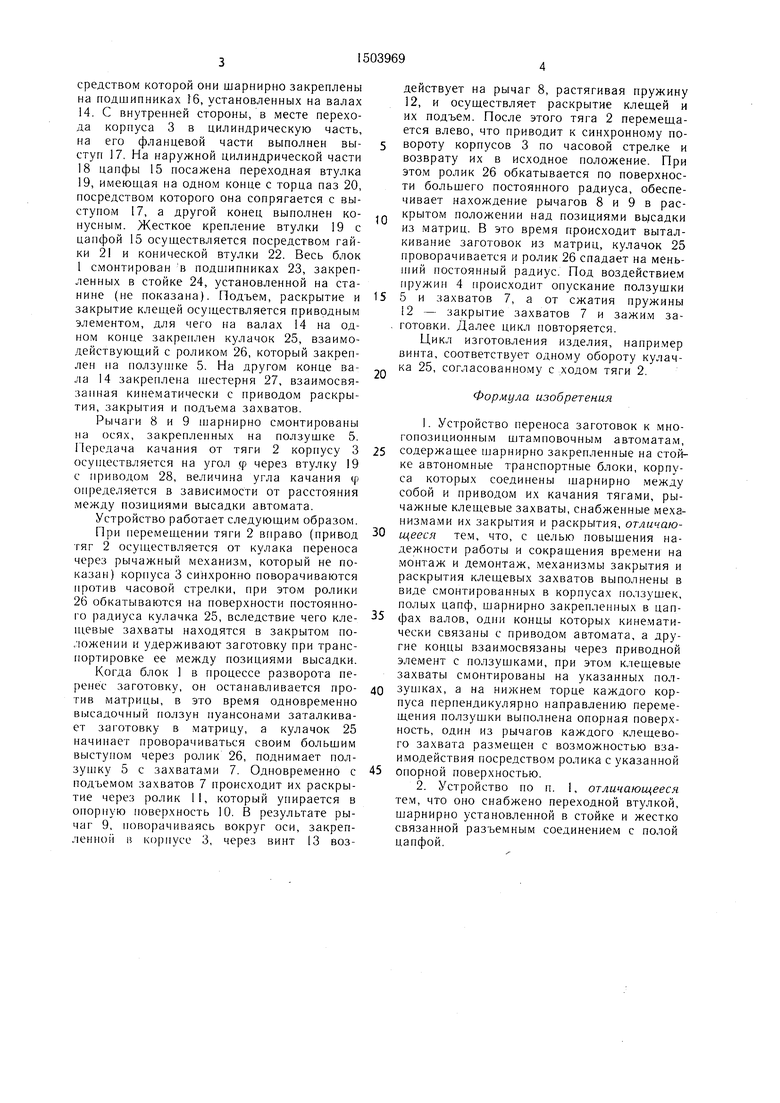
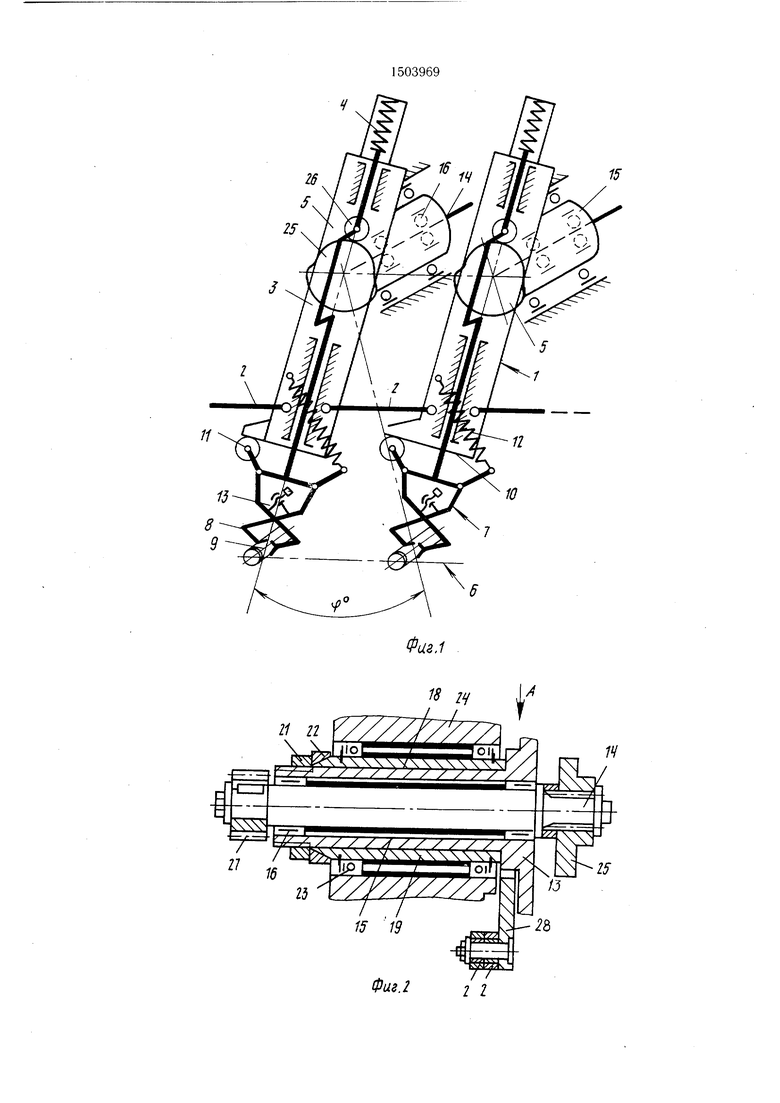
На фиг. 1 кинематически изображено устройство переноса заготовок; на фиг. 2 - полая цапфа и вал, на котором смонтирован блок, разрез; на фиг. 3 - вид А на фиг. 2 (места сопряжения торцов переходной втулки и цапфы).
Устройство переноса заготовок содержит автономные транспортные блоки 1, которые между собой и приводом их качания (не показан) соединены шарнирно тягами 2. Каждый блок 1 состоит из корпуса 3, в котором смонтирована подпружиненная пружиной 4 ползушка 5 с возможностью возвратно-поступательного перемешения относительно оси 6 высадочных матриц (не показаны). Ползушка 5 на своем конце несет клешевые захваты 7, включающие рычаг 8 закрытия и рычаг 9 раскрытия. На нижней части корпусов 3, перпендикулярно перемещению ползушки 5, выполнена контактная поверхность 10, взаимодействующая с роликом 11 рычага 9 раскрытия. Концы рычагов 8 VI 9 постоянно поджаты пружиной 12, одним концом закрепленной на рычаге 8, а другим - на корпусе 3. Винтом 13 осуществляют настройку захватов 7 на размер заготовки. Раскрытие захватов 7, их подъем осуществляется от смонтированного на одной общей оси вала 14. Корпуса 3 снабжены выступающей цилиндрической частью - полой цапфой 15, поСП
о оо
;D
средством которой они шарнирно закреплены на подшипниках 16, установленных на валах 14. С внутренней стороны, в месте перехода корпуса 3 в цилиндрическую часть, на его фланцевой части выполнен выступ 17. На наружной цилиндрической части 18 цапфы 15 посажена переходная втулка 19, имеющая на одном конце с торца паз 20, посредством которого она сопрягается с выступом 17, а другой конец выполнен конусным. Жесткое крепление втулки 19 с цапфой 15 осуществляется посредством гайки 21 и конической втулки 22. Весь блок 1 смонтирован в подшипниках 23, закрепленных в стойке 24, установленной на станине (не показана). Подъем, раскрытие и закрытие клещей осуществляется приводным элементом, для чего на валах 14 на одном конце закреплен кулачок 25, взаимодействующий с роликом 26, который закреплен на нолзущке 5. На другом конце вала 14 закреплена шестерня 27, взаимосвязанная кинематически с приводом раскрытия, закрытия и подъема захватов.
Рычаги 8 и 9 шарнирно смонтированы на осях, закрепленных на ползушке 5. Передача качания от тяги 2 корпусу 3 осуп1ествляется на угол ф через втулку 19 с приводом 28, величина угла качания ф определяется в зависимости от расстояния между позициями высадки автомата.
Устройство работает следующим образом.
При перемещении тяги 2 вправо (привод тяг 2 осуществляется от кулака переноса через рычажный механизм, который не показан) корпуса 3 синхронно поворачиваются против часовой стрелки, при этом ролики 26 обкатываются на поверхности постоянного радиуса кулачка 25, вследствие чего клещевые захваты находятся в закрытом положении и удерживают заготовку при транспортировке ее между позициями высадки.
Когда блок 1 в процессе разворота перенес заготовку, он останавливается против матрицы, в это время одновременно высадочный ползун пуансонами заталкивает заготовку в матрицу, а кулачок 25 начинает проворачиваться своим большим выступом через ролик 26, поднимает пол- зушку 5 с захватами 7. Одновременно с подъемом захватов 7 происходит их раскрытие через ролик II, который упирается в опорную поверхность 10. В результате рычаг 9, поворачиваясь вокруг оси, закрепленной в корпусе 3, через винт 13 воздействует на рычаг 8, растягивая пружину 12, и осуществляет раскрытие клещей и их подъем. После этого тяга 2 перемещается влево, что приводит к синхронному повороту корпусов 3 по часовой стрелке и возврату их в исходное положение. При этом ролик 26 обкатывается по поверхности большего постоянного радиуса, обеспечивает нахождение рычагов 8 и 9 в раскрытом положении над позициями вь садки из матриц. В это время происходит выталкивание заготовок из матриц, кулачок 25 проворачивается и ролик 26 спадает на мень- П1ИЙ постоянный радиус. Под воздействием пружин 4 происходит опускание ползушки
5 и захватов 7, а от сжатия пружины 12 - закрытие захватов 7 и зажим за- готовки. Далее цикл повторяется.
Цикл изготовления изделия, например винта, соответствует одному обороту кулачка 25, согласованному с ходом тяги 2.
Формула изобретения
1.Устройство переноса заготовок к многопозиционным штамповочным автоматам,
5 содержащее щарнирно закрепленные на стойке автономные транспортные блоки, корпуса которых соединены шарнирно .между собой и приводом их качания тягами, рычажные клещевые захваты, снабженные механизмами их закрытия и раскрытия, отличаю0 щевся тем, что, с целью повышения на- дежрюсти работы и сокрапдения времени на .монтаж и демонтаж, механизмы закрытия и раскрытия клещевых захватов выполнены в виде смонтированных в корпусах ползушек, полых цапф, шарнирно закрепленных в цап5 фах валов, одни концы которых кинематически связаны с приводом автомата, а другие концы взаи.мосвязаны через приводной элемент с ползушками, при этом клещевые захваты смонтированы на указанных пол0 зушках, а на нижнем торце каждого корпуса перпендикулярно направлению перемещения ползушки выполнена опорная поверхность, один из рычагов каждого клещевого захвата размещен с возможностью взаимодействия посредством ролика с указанной
5 опорной поверхностью.
2.Устройство по п. 1, отличающееся тем, что оно снабжено переходной втулкой, щарнирно установленной в стойке и жестко связанной разъемным соединением с полой цапфой.
15
Ю
Вид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Механизм переноса многопозиционного высадочного автомата | 1986 |
|
SU1442321A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| Устройство для переноса заготовок | 1988 |
|
SU1556929A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| АВТОМАТ МНОГОПОЗИЦИОННЫЙ ДЛЯ ОБЪЕМНОЙ ШТАМПОВКИ | 1998 |
|
RU2163177C2 |
| МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК КМНОГОПОЗНЦИОННЫМ ВЫСАДОЧНЫМ ПРЕССАМ-АВТОМАТАМ | 1972 |
|
SU432706A3 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Автомат для высадки гвоздей | 1971 |
|
SU379119A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1986 |
|
SU1412874A1 |
Изобретение относится к кузнечно-прессовому оборудованию, а именно к устройствам переноса, и может быть использовано в многопозиционных штамповочных автоматах. Цель изобретения - повышение надежности работы и сокращение времени на монтаж и демонтаж за счет снижения инерционности. Устройство переноса содержит шарнирно закрепленные на станине-стойке автономные транспортные блоки, корпуса которых соединены шарнирно между собой и с приводом их качания тягами. В корпусах смонтированы ползушки, несущие клещевые захваты. Корпусы снабжены полыми цапфами, шарнирно закрепленными в цапфах валами. Одни концы валов кинематически связаны с приводом автомата, а другие концы взаимосвязаны с закрепленными в ползушках роликами. На нижнем торце каждого корпуса, перпендикулярно перемещению ползушки, выполнена контактная поверхность для взаимодействия с роликом рычага раскрытия захвата. При подъеме захватов происходит их раскрытие. В момент нахождения захватов в раскрытом положении над рабочими позициями автомата осуществляется выталкивание заготовок из матриц. При этом захваты опускаются и зажимают заготовки. 1 з.п.ф-лы, 3 ил.
Фиг.З
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| опублик | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
