Изобретение относится к машиностроению и может быть использовано при создании загрузочных устройств для автоматических линий.
Известен схват манипулятора, предназначенный для захвата детали, подлежащей переносу, в котором содержится корпус, коромысло, привод в виде силового цилиндра, захватные рычаги, шарнирно связанные с коромыслом, копирная планка и ролики, шарнирно связанные с захватными рычагами 1.
Недостатками известного устройства являются сложность конструкции за счет того, что привод непосредственно связан с зажимными элементами, а также ограниченная область применения, так как он может зажимать только цилиндрические детали с буртом.
Целью изобретения является упрощение конструкции н расширение технологических возможностей.
Указанная цель достигается тем, что захватное устройство, содержащее корпус, коромысло, захватные рычаги, шарннрно связанные с коромыслом, копирную планку, ролики, шарнирно связанные с захватными рычагами и привод в виде силового цилиндра, на штоке последнего установлен дополнительно введенный переходный элемент, на котором жестко закреплено коромысло, а копирная планка установлена коаксиально коромыслу с возможностью осевого перемещения и взаимодействия с ним, причем в корпусе выполнены дополнительные копирные пазы, а оси роликов расположены в этих пазах.
На фиг. 1 изображено захватное устройство, вид слева; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 2.
Захватное устройство содержит две боковины 1 корпуса (фиг. 1 и 2), соединенные друг с другом через копирную планку 2 посредством шпонок 3, штифтов 4 и болтов 5 (фиг. 3 и 4). В копирной планке 2 закреплена бронзовая втулка 6, по которой перемещается переходный элемент 7. На одном конце переходного элемента имеется резьба для крепления штока силового цилиндра (цилиндр не показан), на другом конце при помощи резьбы и штифта закреплено коромысло 8.
В отверстиях коромысла 8 на осях закреплены рычаги 9. Рычаг 9 на одном конце имеет паз с отверстием, в котором на осях 10
вращаются ролики 11, а на другом конце - замковый паз для крепления в нем зажимного рычага 12. Смещение рычага 9 относительно рычага 12 предотвращается с помощью винта 13 (фиг. б). На боковинах I корпуса выполнены два. копирных паза 14. Одна сторона копирного паза в момент разжима захвата взаимодействует с осью 10. Кроме того, в боковинах 1 корпуса расположены два регулируемых упора 15. Весь захват закреплен к плоскости руки автооператора болтами.
Работа захвата осуществляется следующим образом.
При подаче воздуха в штоковую полость
5 пневмоцилиндра шток начинает перемешаться вверх и перемещает соединенное через переходной элемент 7 коромысло 8. При перемещении переходной элемент 7 направляется втулкой 6. При перемещении коромысла 8 вверх вместе с рычагами 9 и 12
0 ролики 11 взаимодействуют с копирной планкой 2. При этом рычаги 9 на осях разворачиваются, а рычаги 12 совершают сложное движение. При этом зажимаемая деталь подхватывается рычагами 12 с ложемента и прижимается к регулируемым упорам 15.
При подаче воздуха в штоковую полость пневмоцилиндра шток через переходный элемент 7 перемещает коромысло 8 вниз. При этом примерно в середине хода вниз
Q каждая ось 10 взаимодействует с копирными пазами 14 и заставляют рычаги 9, поворачиваясь на осях, сходиться к центру захвата, а рычаги 12, совершая сложное движение, расходятся и опускают деталь на ложемент. Таким образом, сведение рычагов 9 осуществляется путем взаимодействия между осями 10 и копирными пазами 14, а разведение - путем взаимодействия между роликами 11 и копирной планкой 2.
Применение предлагаемого захвата позволяет осуществлять зажим цилиндрических деталей, имеющих самую разнообразную конфигурацию. При зажиме детали, меняющей диаметр при последовательной обработке на различных станках, путем простой настройки можно добиться при одинаковом ходе пневмоцилиндра сохранения одинакового положения оси детали.
Предлагаемый захват прост по конструкции, удобен в обслуживании, обладает широкой универсальностью. Использование Q предлагаемого устройства позволяет расширить технологические возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1979 |
|
SU848268A1 |
| Устройство для поштучной выдачи заготовок | 1973 |
|
SU500857A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Стенд для ремонта рам тележек грузовых вагонов | 1985 |
|
SU1328230A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Устройство для транспортировки заготовок | 1989 |
|
SU1724414A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Автооператор | 1982 |
|
SU1016135A1 |
| Устройство для перегрузки изделий с одного конвейера на другой | 1982 |
|
SU1089016A1 |

ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, коромысло, привод в виде силового цилиндра, захватные рычаги, шарнирно связанные с коромыслом, копирную планку н ролики, шарнирно связанные с захватными рычагами, отличающееся тем, что, с целью упрощения конструкции и расщирения технологических возможностей, на щтоке силового цилиндра установлен дополнительно введенный переходный элемент, на котором жестко закреплено, коромысло, а копирная планка установлена коаксиально коромыслу с возможностью осевого перемещения и взаимодействия с ним, причем в корпусе выполнены дополнительные копирные пазы, а оси роликов расположены в этих пазах. (Л О) ю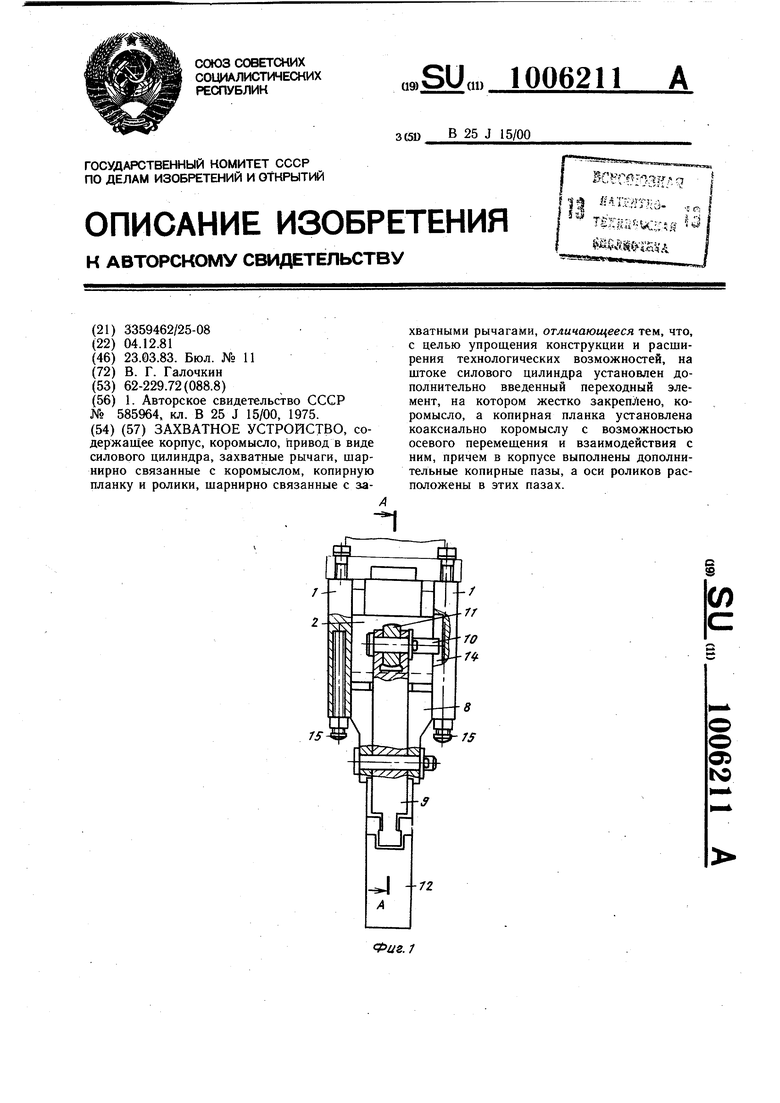
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват манипулятора | 1975 |
|
SU585964A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
